W poprzedniej części omówiliśmy ważniejsze części oprogramowania, w tym obsługę wyświetlacza TFT. Najwyższy czas na opisanie budowy komputera, pokazanie schematów ideowych oraz dołączenia do instalacji samochodu i sposobu jego obsługi.
Przejdźmy zatem do opisu tytułowego urządzenia, w którego implementacji musiałem zmierzyć się z kilkoma istotnymi kwestiami wynikającymi z przyjętych założeń konstrukcyjnych. Projekt ten musiał spełniać następujące kryteria funkcjonalne:
− Pełna funkcjonalność typowego, samochodowego komputera pokładowego. − Czytelny, intuicyjny, graficzny interfejs użytkownika wzorowany na najnowszych rozwiązaniach z segmentu Premium. − Możliwość regulacji jasności podświetlenia wyświetlacza graficznego zgodnie z ustawieniem jasności podświetlenia zegarów pojazdu. − Jak najmniejsze wymiary zewnętrzne. − Duża prostota instalacji uzyskana poprzez zastosowanie pojedynczego złącza połączeniowego o niewielkiej liczbie wyprowadzeń, a więc i liczbie niezbędnych sygnałów sterujących. − Jak najniższa cena całego urządzenia – najlepiej około 100 złotych!
Ponadto, postawiłem dość wysokie wymagania dotyczące funkcjonalności komputera pokładowego, którego to zdecydowałem się wyposażyć w następującą funkcjonalność:
− Pokazywanie temperatury wewnątrz i na zewnątrz pojazdu oraz ostrzeżenia o śliskiej nawierzchni (dla temperatury zewnętrznej poniżej 5°C). − Pokazywanie chwilowej prędkości pojazdu (w km/godz.). − Pokazywanie średniej prędkości pojazdu na przejechanym odcinku drogi (w km/godz.). − Pokazywanie maksymalnej prędkości pojazdu na przejechanym odcinku drogi (w km/godz.). − Pokazywanie chwilowego zużycia paliwa (w l/h dla prędkości ≤ 5km/h oraz l/100km dla pozostałych prędkości). − Pokazywanie średniego zużycia paliwa (w l/100 km). − Pokazywanie paliwa pozostającego w baku pojazdu(w litrach oraz graficznie – bargraf). − Pokazywanie przewidywanego zasięgu pojazdu na paliwie pozostającym w baku pojazdu (w godz.). − Pokazywanie przejechanego dystansu od ostatniego kasowania (w km). − Pokazywanie aktualnego czasu i daty (z zastosowaniem mechanizmu podtrzymania zasilania). − Pokazywanie statystyk spalania na każde przejechane 10km/1km (dla ostatnio przejechanych 150 i 15 km). − Realizację funkcji automatycznego włącznika świateł mijania po osiągnięciu przez pojazd prędkości powyżej 5 km/godz.
Schemat naszego urządzenia, spełniającego przedstawione powyżej, wyśrubowane założenia konstrukcyjne pokazano na rysunku 3. Jest to raczej nieskomplikowany system mikroprocesorowy zbudowany z użyciem mikrokontrolera ATmega644-PA, układu zegara czasu rzeczywistego typu MCP7940N-I/SN z podtrzymaniem zasilania oraz wyświetlacza TFT. Mikrokontroler jest „sercem” urządzenia i realizuje całą, założoną funkcjonalność urządzenia, posiłkując się w tym celu szeregiem wewnętrznych modułów peryferyjnych. Sam układ jest taktowany rezonatorem kwarcowym 12,288 MHz, dzięki czemu jest zapewniona duża dokładność pomiaru czasu, niezbędna z punktu widzenia zastosowanych mechanizmów sprzętowo-programowych realizujących funkcje pomiarowe, a przy tym duża prędkość ładowania obrazków stanowiących elementy graficznego interfejsu użytkownika. Oczywiście, lepiej byłoby zastosować maksymalną, dostępną częstotliwość taktowania mikrokontrolera tj. 20 MHz, jednak przy napięciu zasilania 3,3 V jest to wartość progowa, dla której deklarowana jest poprawna praca mikrokontrolera.
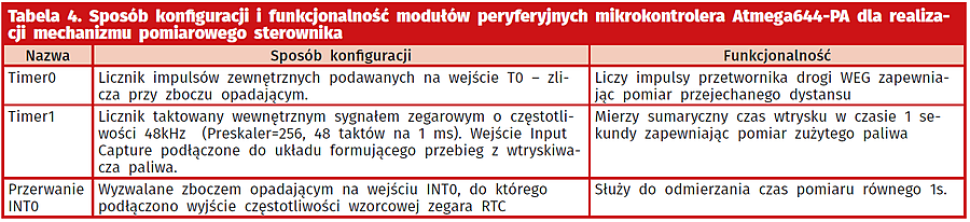
W celu realizacji założonej funkcjonalności urządzenia, w programie obsługi niniejszego sterownika, wykorzystano dwa sprzętowe układy czasowo-licznikowe znajdujące się „na pokładzie” mikrokontrolera oraz jedno przerwanie zewnętrzne. Konfiguracja wspomnianych modułów funkcjonalnych oraz realizowaną przez nie funkcjonalność pokazano w tabeli4.
Dodatkowo, w programie obsługi urządzenia użyto ostatniego, dostępnego układu czasowo-licznikowego mikrokontrolera Timer2, skonfigurowanego do pracy w trybie CTC. Jego zadaniem jest generowanie cyklicznych przerwań (co 10ms) służących mechanizmowi nieblokującej obsługi klawiatury użytkownika. Dzięki takiego rozwiązania program obsługi aplikacji urządzenia nie używa żadnych pętli opóźnień, co zapewnia jego bezproblemową pracę oraz możliwość detekcji czasu naciśnięcia przycisku (krótki/długi/przytrzymanie itp.), dzięki czemu udało się zoptymalizować sposób obsługi urządzenia zwiększając jego ergonomię. Jak pokazano w tabeli 4, mikrokontroler w każdej sekundzie dokonuje pomiaru sumarycznej liczby impulsów doprowadzanych na wejście T0 mikrokontrolera z przetwornika drogi pojazdu oraz sumarycznego czasu wtrysków, których to sygnał jest doprowadzony na wejście przechwytujące licznika Timer1 (wejście ICP1). W celu realizacji drugiej z funkcjonalności, zaprojektowano kompletny i bezpieczny układ wejściowy (przy użyciu popularnego optoizolatora LTV817) formujący sygnał wtryskiwacza dla potrzeb wejściowych obwodów mikrokontrolera.
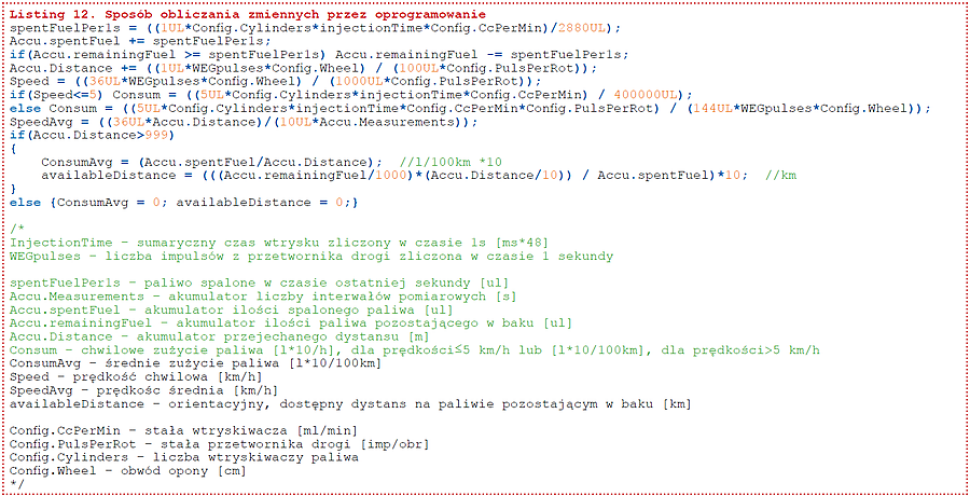
Na listingu12 pokazano fragmenty programu, za których pomocą są wyznaczane wyświetlane parametry. Kilka słów komentarza wymaga mechanizm akumulowania przejechanej drogi jak i zużytego paliwa. Komputer pokładowy oblicza i wyświetla średnie wartości zużycia paliwa i prędkości, objętość paliwa pozostającego w baku pojazdu oraz przejechany dystans. W celu wyznaczenia wspomnianych wartości obliczeniowych jest niezbędna znajomość całkowitego zużycia paliwa oraz dystansu (od momentu wyzerowania stosownych liczników), a co za tym idzie – niezbędny staje się mechanizm akumulowania mierzonych wartości, przechowujące je nawet po zaniku napięcia zasilającego. Mikrokontroler ATmega644-PA ma nieulotną pamięć EEPROM, jednak zapewnia ona ograniczoną (zwykle do ok. 100 tys.) liczbę gwarantowanych cyklów zapisu. W takim razie jak i kiedy dokonywać zapisu niezbędnych wartości obliczeniowych by nie spowodować szybkiego uszkodzenia tejże pamięci? Otóż, tym razem nie użyto pamięci EEPROM w sposób, jaki miało to miejsce w pierwszej wersji Mee, ale posłużono się pamięcią RAM, którą dysponuje układ zegara czasu rzeczywistego MCP7940N-I/SN, a której to zawartość jest podtrzymywana nawet w czasie wyłączenia zapłonu (dzięki napięciu BATT i dodatkowemu stabilizatorowi U4). Dzięki temu wszystkie niezbędne dane obliczeniowe zebrane w stosowna strukturę (zaopatrzone suma kontrolną CRC8) są każdorazowo aktualizowane w tejże pamięci, zapewniając poprawne funkcjonowanie urządzenia. Oczywiście, odłączenie napięcia zasilającego BATT spowoduje utratę wszystkich akumulatorów obliczeniowych i wyzerowanie odpowiednich zmiennych. Na koniec dodam, iż zdecydowaną większość pamięci programu aplikacji zajęły wzorce obrazków wyświetlanych w ramach graficznego interfejsu użytkownika (niektóre z nich, mimo kompresji, zajmują po 5 kB tejże pamięci) oraz tablice używanych czcionek ekranowych.
Montaż
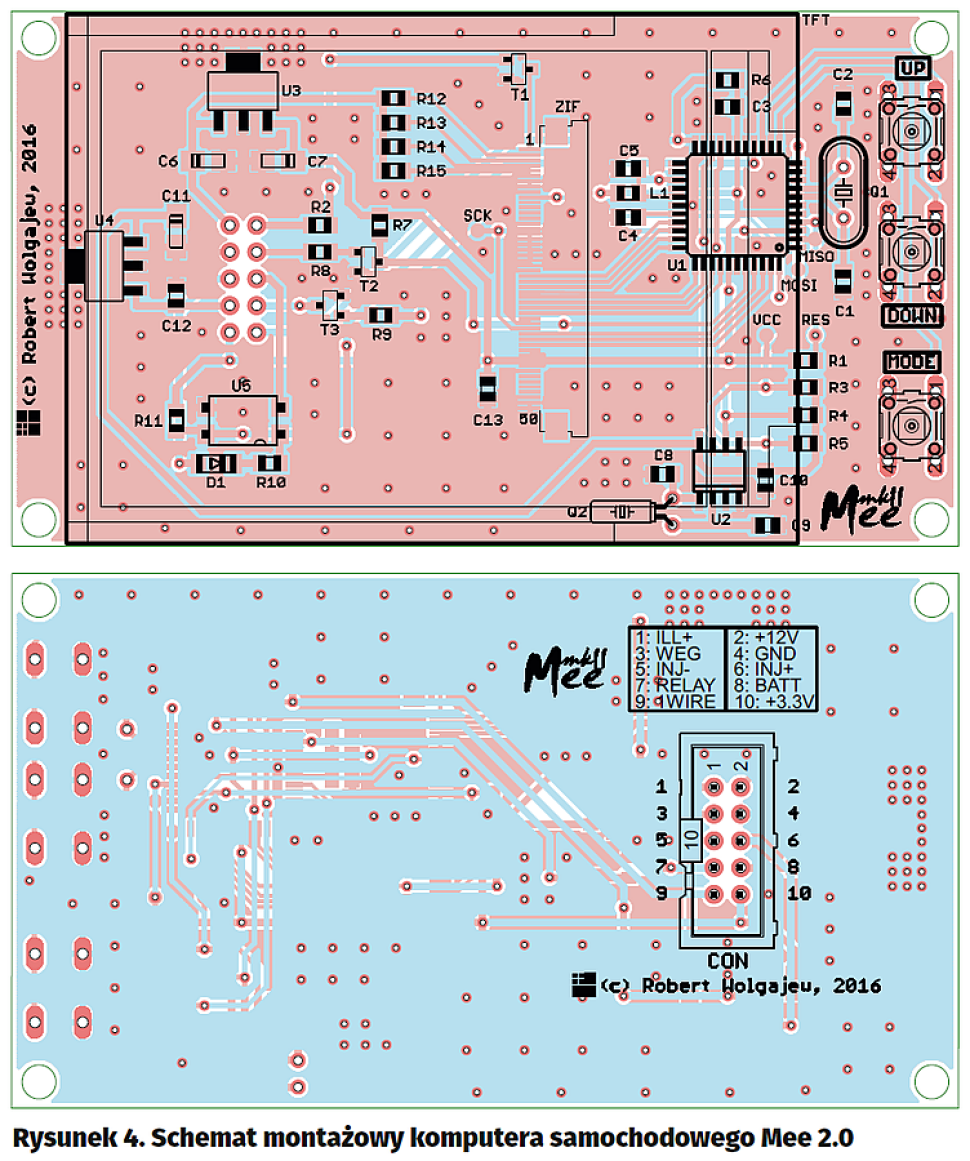
Schemat montażowy komputera pokazano na rysunku4. Zaprojektowano dwustronny obwód drukowany o zawierających w zdecydowanej większości komponenty w obudowach do montażu powierzchniowego. Co bardzo ważne, w przypadku środowisk o sporej liczbie zakłóceń, jakim bez wątpienia, jest instalacja samochodowa, zadbano o odpowiednie prowadzenie masy oraz doprowadzeń sygnałów krytycznych.
Moduł wyświetlacza TFT jest dołączany do płytki z użyciem gniazda ZIF o bardzo gęstym rastrze (0,5 mm) i dlatego montaż urządzenia rozpoczynamy właśnie od przylutowania tego gniazda. Najprostszym sposobem montażu elementów o tak dużym zagęszczeniu wyprowadzeń, niewymagającym jednocześnie posiadania specjalistycznego sprzętu, jest użycie typowej stacji lutowniczej, cyny o dobrej jakości z odpowiednią ilością topnika oraz dość cienkiej plecionki rozlutowniczej, która umożliwi usunięcie nadmiaru cyny spomiędzy wyprowadzeń złącza. Należy przy tym uważać by nie uszkodzić termicznie złącza. Jakość tak wykonanego połączenia sprawdzamy pod lupą oraz korzystając z omomierza. Wspomniana kontrola będzie znacznie łatwiejsza, jeśli zmontowaną płytkę sterownika przemyjemy alkoholem izopropylowym, wypłukując nadmiar kalafonii. Następnie lutujemy mikrokontroler, pozostałe elementy półprzewodnikowe typu SMD, kolejno elementy bierne, a na samym końcu wszystkie elementy przeznaczone do montażu przewlekanego. Ostatnim podzespołem, jaki należy wlutować, tym razem od spodu, jest gniazdo połączeniowe CON.
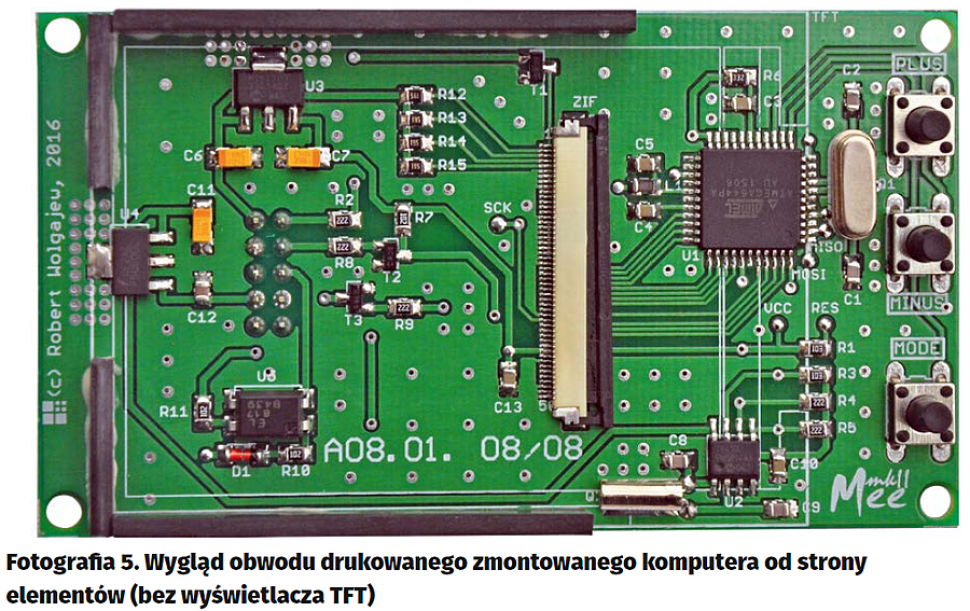
Na samym końcu dołączamy taśmę wyświetlacza TFT do złącza ZIF dbając o odpowiednie zablokowanie zatrzasków. Sam wyświetlacz TFT przyklejamy do płytki sterownika korzystając z pasków dwustronnej taśmy samoprzylepnej, która standardowo umieszczona jest pod spodem modułu wyświetlacza (na jego brzegach). Aby to było możliwe, należy przykleić wąskie paski (około 2 mm) twardego materiału do płytki w miejscach oznaczonych specjalnym nadrukiem – będą one tworzyły dystans pomiędzy płytką sterownika a wyświetlaczem TFT. Po przyklejeniu dystansów przyklejamy moduł wyświetlacza we wcześniej opisany sposób. Na rysunku 5 pokazano wygląd obwodu drukowanego zmontowanego sterownika bez podłączonego wyświetlacza TFT.
Podłączenie
Komputer powinien być podłączany przez doświadczonego elektryka lub elektronika samochodowego, najlepiej przy odłączonym akumulatorze. Urządzenie należy zamontować w suchym miejscu, z dala od urządzeń elektronicznych i elektrycznych (typu sterownik silnika ECU, moduł kontroli nadwozia BCM czy alarm), których działanie mogłoby zakłócać jego funkcjonowanie. Komputer należy zaopatrzyć w odpowiednią obudowę, najlepiej ekranowaną, chroniącą przez zwarciem, zawilgoceniem, uszkodzeniem mechanicznym czy zburzeniami EMI. W celu wykorzystania wszystkich dostępnych funkcji urządzenia, komputer należy przyłączyć tylko i wyłącznie do trzech (co nie jest bez znaczenia dla początkujących elektroników) podzespołów samochodu:
− Złącza radioodbiornika. Umożliwia ono zasilenie układu po włączeniu stacyjki (+12 V), podtrzymanie pracy zegara RTC (BATT), doprowadzenie sygnału prędkości pojazdu (WEG) oraz napięcia do podświetlenia wyświetlacza graficznego (ILL+). − Wtryskiwacza paliwa, co umożliwia to realizację funkcji komputera pokładowego (INJ+, INJ–). − Wyłącznika świateł, co umożliwia realizację funkcji automatycznego załączania świateł mijania po osiągnięciu przez pojazd prędkości 5 km/godz.
Ponadto, urządzenie wyposażono w możliwość dołączenia dwóch, scalonych termometrów cyfrowych DS18S20 (lub DS1820). Umożliwia to pomiar temperatury wewnątrz i na zewnątrz pojazdu. Termometry te należy przyłączyć do złącza CON (wyprowadzenia „GND”, „+3.3V” i „1WIRE”), najlepiej za pomocą 3-żyłowego przewodu ekranowanego. Należy eksperymentalnie dobrać miejsce zamocowania obu czujników, aby odwzorować średnią temperaturę panującą wewnątrz pojazdu oraz temperaturę zewnętrzną. Należy unikać montażu czujnika temperatury wewnętrznej w pobliżu nawiewów, drzwi, okien itp. Najlepszym miejscem w tym wypadku, wydaje się być tylna część tunelu środkowego lub kieszeń-schowek pod radioodbiornikiem. Z kolei, dla czujnika temperatury zewnętrznej, który należy zabezpieczyć przed działaniem warunków atmosferycznych, najlepszym miejscem montażu wydaje się przestrzeń za przednim zderzakiem pojazdu. Wygląd typowych złącz ISO radioodbiornika wraz z zaznaczeniem interesujących nas wyprowadzeń pokazano na rysunku6.
Co ciekawe, w zależności od marki producenta pojazdu, piny o numerach 4 i 7 („+12V” i „BATT”) mogą być zamienione miejscami w porównaniu do pokazanych na rys. 6 opisów, w związku z czym ich rzeczywiste funkcje należy ustalić za pomocą woltomierza – napięcie na pinie „+12V” powinno występować wyłącznie po włączeniu zapłonu, zaś na pinie „BATT” permanentnie, tzn. dopóki akumulator jest podłączony do instalacji pojazdu. Napięcie na pinie „ILL+” to przebieg prostokątny o amplitudzie 12 V i wypełnieniu zależnym od ustawienia pokrętła regulującego jasność podświetlenia zegarów pojazdu W naszym wypadku jest ono wykorzystywane do regulacji jasności podświetlenia wyświetlacza urządzenia. Jeśli nie zależy nam na takiej funkcjonalności, pin „ILL+” należy na stałe połączyć z pinem „+12V” złącza CON.
Sposób przyłączenia komputera do wtryskiwacza paliwa
Wykonując połączenia z wtryskiwaczami należy zachować ostrożność i staranność, aby nie doprowadzić do zwarcia przewodów zasilających wtryskiwacz, co mogłoby skutkować uszkodzeniem wyjściowych obwodów sterujących elektronicznego układu sterującego pracą silnika ECU.
Każdy wtryskiwacz ma 2 wyprowadzenia. Pierwsze z nich to stały sygnał +12 V, który zostaje podany po przekręceniu kluczyka stacyjki i który to należy doprowadzić do wejścia „INJ+” komputera Mee. Drugie to sygnał sterujący z modułu ECU (komutowana masa), który to z kolei należy przyłączyć do wejścia „INJ–”. Wspomniane przewody należy starannie zabezpieczyć przed możliwością ewentualnego przetarcia izolacji i powstania zwarcia – dotyczy to zwłaszcza otworów przelotowych, przez które zostaną one przeprowadzone. Aby maksymalnie zabezpieczyć wejściowy układ pomiarowy czasu wtrysku przed zaburzeniami (np. od będącej zwykle w pobliżu listwy zapłonowej), najlepiej zastosować 2-żyłowy przewód ekranowany o odpowiednim przekroju, a ekran tego przewodu po obu stronach dołączyć do masy pojazdu. Możliwe jest także włączenie układu formującego impulsy wtryskiwaczy paliwa bezpośrednio do odpowiedniego wyjścia sterownika silnika ECU, na którym to występuje przebieg sterujący pracą wtryskiwaczy. W takim przypadku należy odpowiednio zmniejszyć wartość rezystora R10 ustalającego prąd diody LED transoptora LTV817. Aby ułatwić proces instalacji sterownika w pojeździe, po stronie wyprowadzeń obwodu drukowanego, a więc również złącza CON, znalazł się opis poszczególnych jego wyprowadzeń. Rysunek7 ilustruje sposób dołączenia poszczególnych wyprowadzeń złącza CON do instalacji pojazdu.
Opcjonalny przekaźnik wraz z diodą 1N4148 (rys. 7) służy do realizacji funkcji automatycznego załączania świateł pojazdu. Styki wykonawcze tego przekaźnika należy dołączyć do odpowiednich wyprowadzeń przełącznika świateł mijania znajdującego się w pojeździe, pamiętając o właściwym doborze konfiguracji styków zastosowanego przekaźnika do konfiguracji przełącznika świateł. Z uwagi na rodzaj zastosowanego tranzystora sterującego, maksymalny prąd cewki podłączanego przekaźnika nie powinien przekroczyć wartości 300 mA.
 Zaloguj
Zaloguj