Zaloguj
Zaloguj



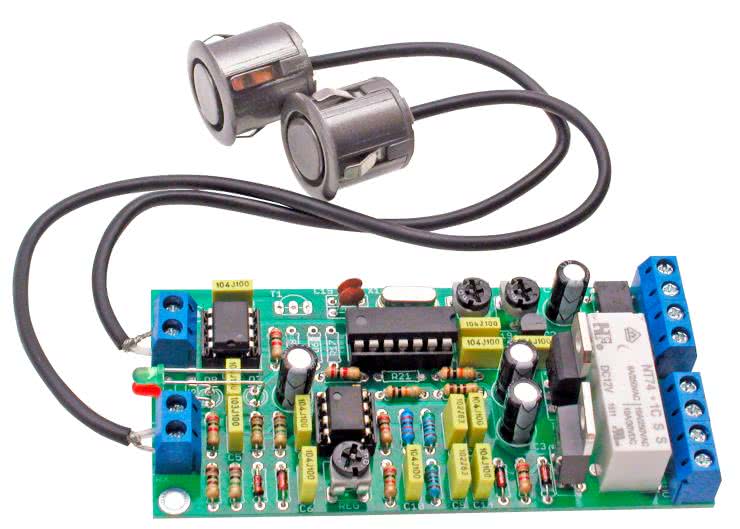
- Współpracuje z ultradźwiękowymi czujnikami stosowanymi w motoryzacji.
- Czujniki estetyczne, hermetyczne, można malować, łatwe montażu.
- Zasięg działania regulowany w zakresie od ok. 10 cm…1 m.
- Regulacja czasu załączenia w zakresie ok. 1 s...2,5 min.
- Napięcie zasilające 10…17 V AC, 12…24 V DC, prąd obciążenia do 0,2 A.
- Wymiary 95 mm×47 mm×20 mm.
Urządzenie okresowo emituje krótki ciąg impulsów o częstotliwości 40 kHz. Taka fala dźwiękowa rozchodzi się w powietrzu z prędkością ok 340 m/s i jeśli na swojej drodze trafi na przeszkodę o odpowiednich właściwościach, to część fali odbije się, a pewna jej porcja podąży także w kierunku, z którego przybyła. Po emisji fali urządzenie „nasłuchuje” i jeśli znajdzie odpowiednio silny sygnał będący echem wysłanej fali, to uznaje, że w zasięgu znajduje się jakiś obiekt. Możliwe jest ustawienie maksymalnego czasu oczekiwania na echo fali a więc także zasięgu działania. Na wykrycie obiektu urządzenie reaguje załączeniem przekaźnika na pewien regulowany czas.
Taki radar najlepiej reaguje na obiekty o twardej, płaskiej powierzchni dobrze odbijającej dźwięki. Radzi sobie także z wykrywaniem obiektów o gorszych właściwościach np. ludzka dłoń. Obiekty o porowatej, miękkiej powierzchni muszą mieć nieco większe wymiary, aby zostały wykryte.
Budowa
Schemat ideowy radaru ultradźwiękowego pokazano na rysunku 1. Tor nadawczy i odbiorczy są oddzielone, a urządzenie działa z dwoma czujnikami. Pierwszy prototyp działał z jednym czujnikiem, który pełnił funkcję nadawczo-odbiorczą, jednak takie rozwiązanie ograniczało dolną granicę zasięgu do około 30…40 cm. Radar po prostu nie wykrywał bliżej ustawionych obiektów.
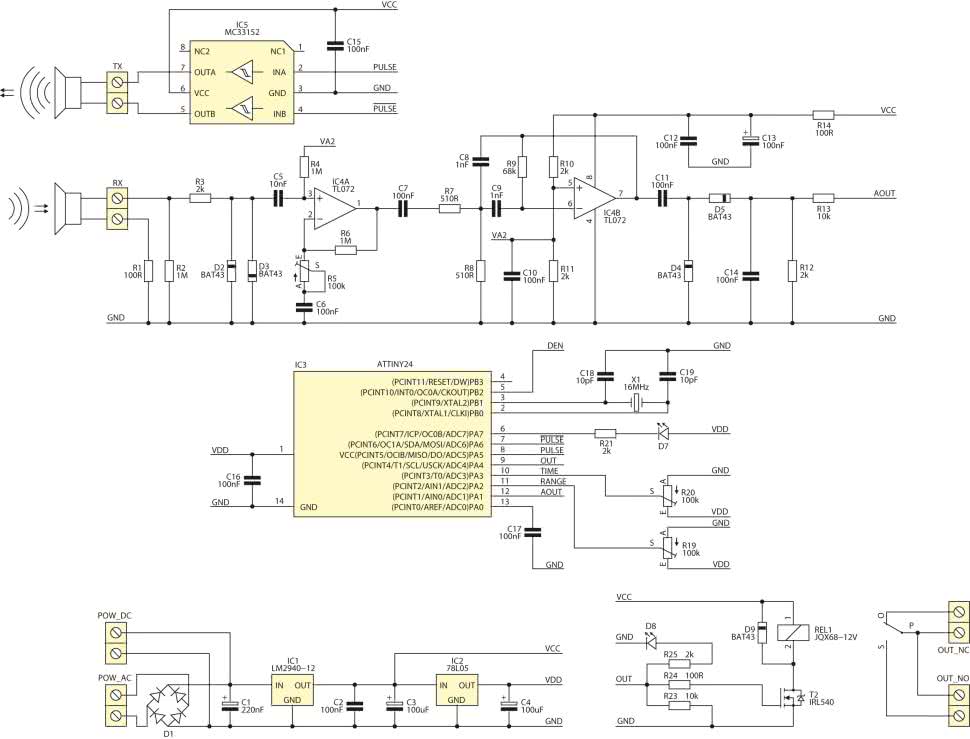
W torze nadawczym zastosowano podwójny driver tranzystorów MOSFET – układ MC33152. Tranzystory MOSFET w obwodzie bramki mają dużą pojemność (do kilku nF), więc układ sterujący taką bramką musi zapewnić jak najszybsze ładowanie/rozładowanie tej pojemności, a to wymusza zapewnienie dużej stromości zboczy sygnału oraz dużych prądów przełączania (nawet do kilku A). Dzięki tym cechom driver doskonale nadaje się do sterowania przetwornikiem piezoelektrycznym, który znajduje się w ultradźwiękowym czujniku samochodowym. Ponadto, driver konwertuje amplitudę sygnałów sterujących z 5 V do 12 V, a dzięki dwóm identycznym torom jest możliwe sterowanie przetwornika w sposób mostkowy. Te rozwiązania zapewniają emisję odpowiednio silnej fali ultradźwiękowej.
W torze odbiorczym znajduje się kilka bloków formujących odebrany sygnał. Pierwszy to ogranicznik amplitudy (D2 i D3), przedwzmacniacz (IC4A), filtr aktywny (IC4B) i na końcu prostownik (D4, D5). W przeciwieństwie do przetworników ultradźwiękowych „z siatką”, popularnych np. wśród modułów dla Arduino, czujniki stosowane w motoryzacji dają dużo słabszy sygnał, dlatego tor odbiorczy jest tak rozbudowany. Na wyjściu pojawia się impuls (fala) o amplitudzie kilku woltów w chwili nadawania w torze nadawczym oraz niewielki impuls o amplitudzie poniżej wolta w momencie odebrania odbitego echa. Sygnał trafia do przetwornika A/C wbudowanego w mikrokontroler, a wtedy program sterujący wyszukuje impuls (falę) o odpowiedniej szybkości narastania.
Pozostałe elementy urządzenia można podzielić na blok zasilania (IC1, C2), blok wykonawczy (T2, REL1), oraz blok sterujący z mikrokontrolerem IC3 i programem zawartym w jego pamięci.
Montaż i uruchomienie
Płytka urządzenia została zaprojektowana do montażu przewlekanego. Komponenty należy montować zgodnie z ogólnymi zasadami – jej schemat montażowy pokazano na rysunku 2. Zasilanie należy dołączyć do zacisków POW_AC (napięcie zmienne) lub POW_DC (napięcie stałe, zacisk „V” – plus, zacisk „G” – minus). Zaciski OUT_NO oraz OUT_NC to wyprowadzenia styków przekaźnika normalnie otwartych i normalnie zwartych. To złącza TX należy dołączyć jeden przetwornik ultradźwiękowy, który będzie pełnił funkcję nadajnika, a do złącza RX drugi przetwornik ultradźwiękowy, który będzie odbiornikiem. W przypadku odbiornika warto zachować polaryzację. Oplot przewodu to minus przetwornika – należy go dołączyć do zacisku oznaczonego „G”. Każdy czujnik samochodowy może pracować jako nadajnik lub odbiornik. Oba czujniki muszą być skierowane w tę sama stronę i ustawione w tej samej płaszczyźnie.
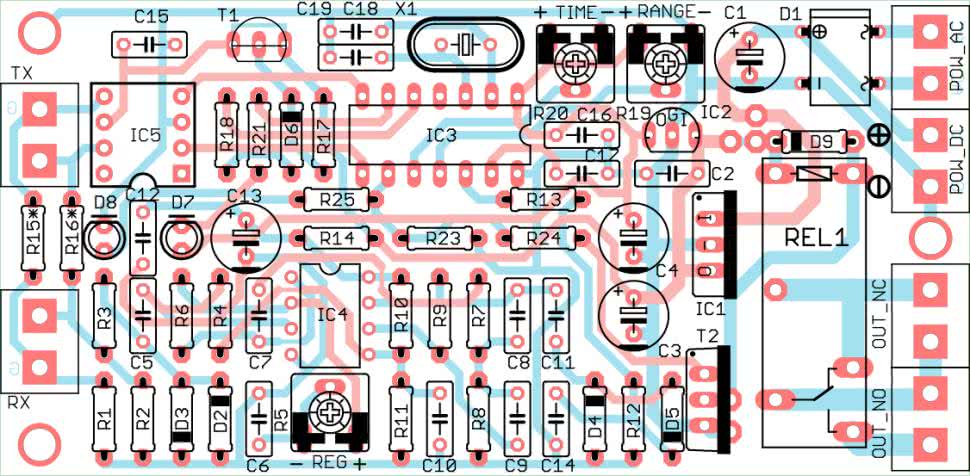
Na płytce znajdują się trzy potencjometry miniaturowe. Potencjometr „REG” służy do regulowania wzmocnienia toru odbiorczego, czyli w efekcie – czułości urządzenia. Podczas uruchamiania należy ustawić go w położeniu środkowym. Ustawienie zbyt dużego wzmocnienia spowoduje wzbudzenie toru odbiorczego i w efekcie brak reakcji urządzenia. Potencjometr „TIME” służy do regulowania czasu załączania wyjścia, A „RANGE” do regulacji zasięgu działania. Dioda LED D7 miga co jakiś czas sygnalizując aktywność urządzenia oraz po każdym wykryciu obiektu. Dioda D8 odzwierciedla stan wyjścia. Jeśli dioda świeci, to przekaźnik jest załączony i zwarte są styki OUT_NO.
KS
- R15…R18: nie montować
- R1, R14, R24: 100 Ω
- R2, R4, R6: 1 MΩ
- R13, R23: 10 kΩ
- R7, R8: 510 Ω
- R9: 62 kΩ
- R3, R10…R12, R21, R25: 2 kΩ
- R5, R20, R19: 100 kΩ
- C1: 220 µF/35 V
- C2, C6, C7, C10…C12, C14…C17: 100 nF
- C3, C4, C13: 100 µF/25 V
- C5: 10 nF
- C8, C9: 1 nF
- C18, C19: 10 pF
- D6, T1: nie montować
- D1: mostek prostowniczy DF08
- D2…D5, D9: BAT43
- D7, D8: dioda LED 3 mm
- T2: IRL540
- IC1: 7812
- IC2: 78L05
- IC3: ATtiny24
- IC4: TL072
- IC5: MC33152
- REL1: przekaźnik JQX68-12V
- X1: rezonator kwarcowy 16 MHz
- TX, RX, POW_AC, POW_DC, OUT_NC, OUT_NO: złącze DG301/500-2