Zaloguj
Zaloguj



Układ ma wbudowany driver o obciążalności do 2 A (szczytowo 3 A) przy napięciu zasilania z zakresu 8…28 V. Dzięki zastosowaniu tranzystorów mocy o małej rezystancji przewodzenia, układ ma dużą sprawność. Uzupełniono go o sygnalizację stanów awaryjnych, takich jak: zablokowanie napędu, przegrzanie, przeciążenie, zwarcie i blokadę podnapięciową. Istotną cechą układu jest zasilanie silnika BLDC przebiegiem sinusoidalnym, co znacząco poprawia komfort pracy i zmniejsza szumy napędu.
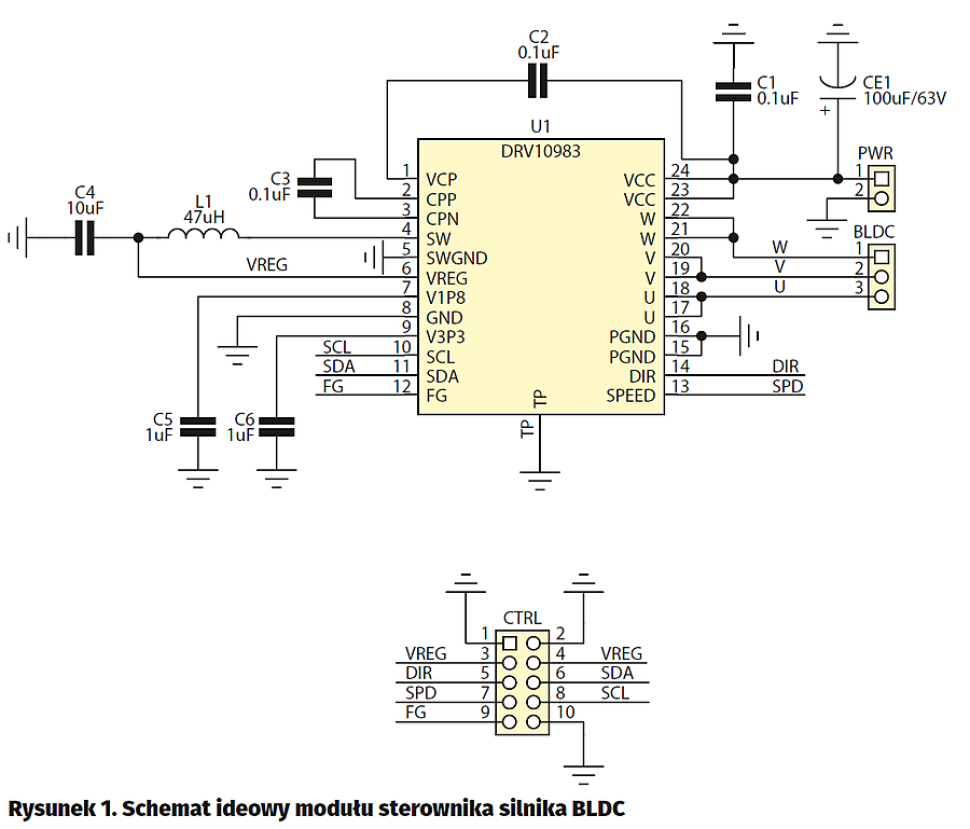
Schemat ideowy modułu pokazano na rysunku 1. Aplikacja układu DRV10983 jest nieskomplikowana. Moduł jest zasilany za pomocą złącza PWR napięciem z zakresu 8…28 V, dobranym w zależności od zastosowanego silnika. Kondensatory CE1 i C1 filtrują zasilanie. Należy pamiętać o odpowiedniej dodatkowej, zewnętrznej pojemności filtrującej, zdolnej zapewnić stabilne zasilanie silnika. Z napięcia VM poprzez wewnętrzną przetwornicę jest generowane napięcie VCP potrzebne do zasilania drivera tranzystorów MOSFET.
Silnik jest dołączany do złącza BLDC z zachowaniem kolejności uzwojeń UVW. DRV10983 sterowany jest sygnałami: DIR odpowiadającym za kierunek wirowania, SPD odpowiadającym za prędkość obrotową, na wyjściu FG dostępny jest sygnał tachometryczny. Zależnie od konfiguracji, układ dopuszcza pełne sterowanie albo za pomocą I2C, albo wejścia SPEED (SPD) sygnałem PWM lub analogowym (0…Vreg). Napięcie Vreg dopuszcza obciążalność 50 mA i może służyć do zasilania procesora sterującego. Wartość napięcia Vreg jest określana programowo na 3,3 V lub 5 V (VregSel).
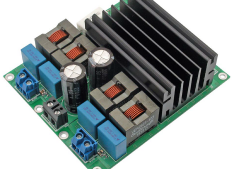
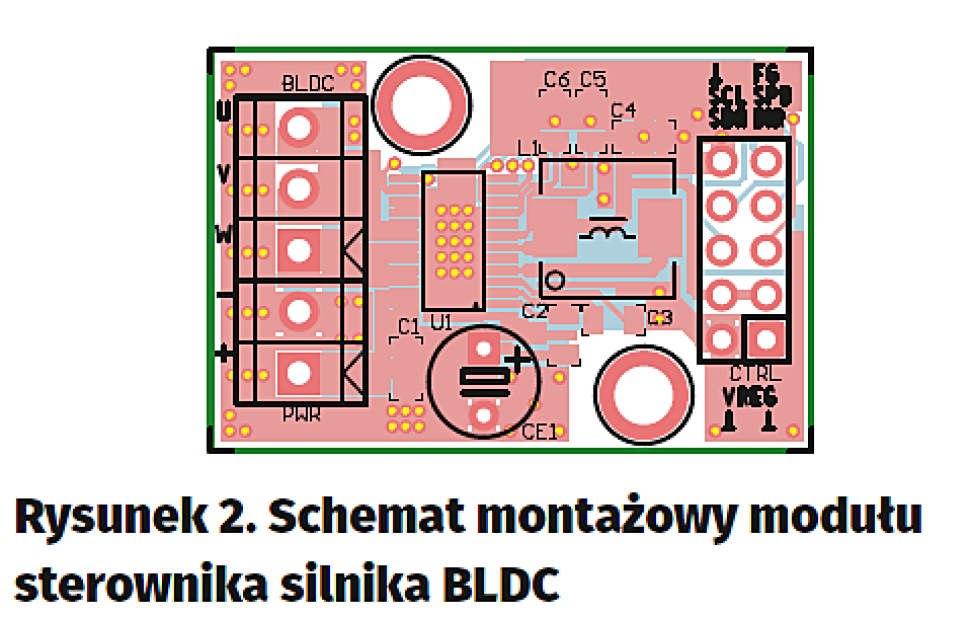
Minimoduł zmontowano na dwustronnej płytce drukowanej. Rozmieszczenie elementów przedstawia rysunek 2. Sposób montażu jest typowy i nie wymaga opisywania. Należy jedynie zwrócić uwagę na poprawne przylutowanie padu termicznego. Przed uruchomieniem modułu, należy zidentyfikować parametry silnika i odpowiednio skonfigurować sterownik. Szczegółowy opis rejestrów i metody sterowania opisane są w karcie katalogowej DRV10983.
Adam Tatuś, EP