Zaloguj
Zaloguj



Rysunek 1. Tabela prawdy układu scalonego DRV8871
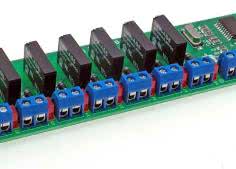
Płytka umożliwia sterowanie dwóch silników prądu stałego średniej mocy (szczytowo 3,6 A) zasilanych napięciem z zakresu 6,5...24 V, dwóch obciążeń 24 V/0,5 A, sterowanie/monitorowanie 8 wyprowadzeń GPIO w standardzie CMOS 3,3 V, np.: dla współpracy z sensorami, dołączenia magistrali I²C oraz komunikacji szeregowej. Układ drivera silnika jest oparty o specjalizowany driver DRV8871 firmy Texas Instruments.
Układ zawiera komponenty niezbędne dla sterowania silnikiem szczotkowym prądu stałego: dwa półmostki MOSFET z bezstratnym układem pomiaru prądu silnika (niewymagającym zewnętrznych elementów), logikę zabezpieczającą i pompę ładunku do sterowania tranzystorów mocy, wbudowany układ zabezpieczeń przeciążeniowych i termicznych oraz wejściową logikę sterującą.
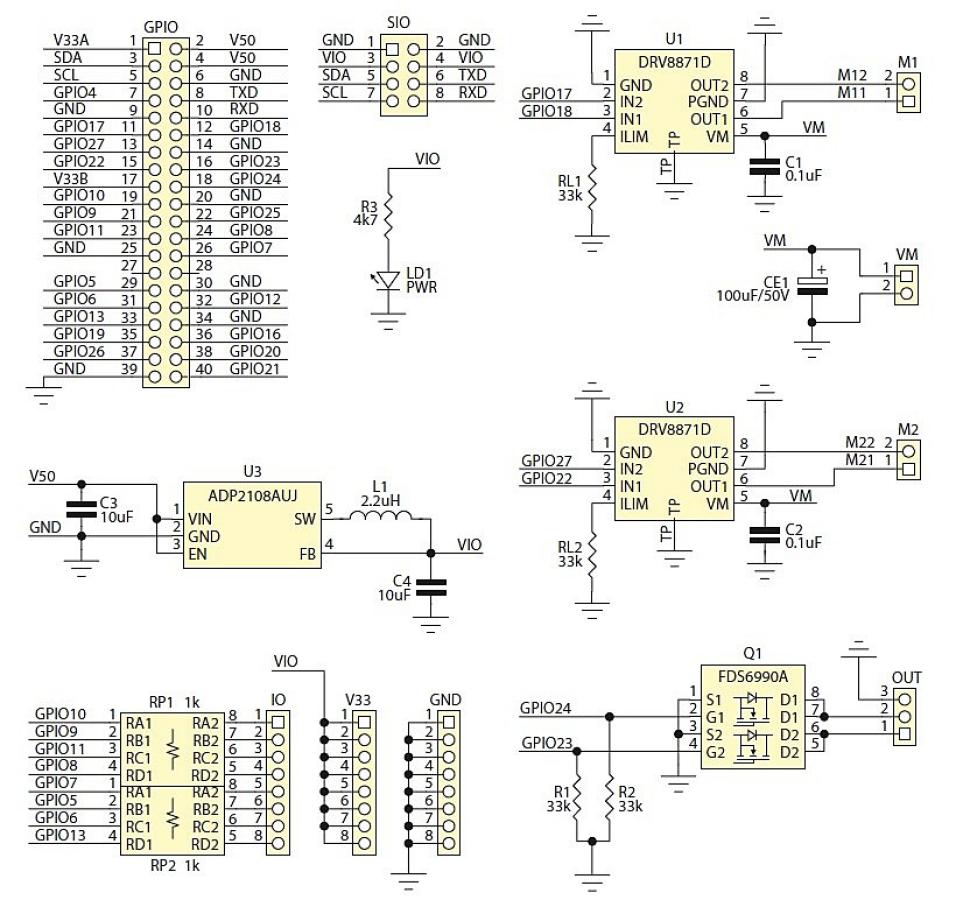
Rysunek 2. Schemat ideowy drivera silników dla Raspberry PI Zero
Wbudowany czujnik prądu silnika nie wymaga zewnętrznego rezystora pomiarowego, ale w dalszym ciągu możliwa jest zmiana maksymalnego prądu uzwojeń poprzez dobór rezystora przyłączonego do wyprowadzenia IIlim, zgodnie z wzorem IIlim=64/Rilim [kV/kΩ].
W prototypie prąd ustalono na 2 A, co odpowiada Rilim o rezystancji około 33 kΩ. Minimalną rezystancję ustalono na 15 kΩ. Sterowanie kierunkiem obrotów odbywa się w konwencji L/R z wejść IN1/IN2, zgodnie z tabelą prawdy pokazaną na rysunku 1.
Schemat ideowy płytki sterownika zamieszczono na rysunku 2. Napięcie zasilania silników VM jest oddzielone od napięcia sterującego i ze względu na wymaganą moc musi pochodzić ze źródła zewnętrznego. Napięcie VM, doprowadzone poprzez złącze VM, zasila układy U1 i U2, kondensator CE1 filtruje zasilanie.
Należy pamiętać, że to wartość minimalna i w zewnętrznym zasilaczu powinien być "bank" kondensatorów o pojemności zdolnej do zapewnienia stabilnego zasilania układu. Rezystory RL1 i RL2 powinny być dobrane do posiadanego silnika wg wzoru na Rilim.
Oprócz sterowania silnikiem przydatna jest także możliwość sterowania obciążeniem. Podwójny tranzystor MOSFET (Q1) w konfiguracji OD może być wykorzystany do załączania oświetlaczy, elektromagnesów itp. Maksymalna obciążalność wyjść to 0,5 A/24 V. W przypadku obciążeń indukcyjnych należy wyjścia OUT odpowiednio zabezpieczyć transilem lub diodą dołączoną równolegle do obciążenia.
Do złącza IO w standardzie Arduino Bricks (IO/VCC/GND) doprowadzono 8 linii GPIO w standardzie CMOS 3,3 V, rezystory RP1 i R2 zabezpieczają wstępnie GPIO przed błędami w konfiguracji. Aby nie przeciążać wbudowanego stabilizatora 3,3 V, płytka ma własną przetwornicę obniżającą napięcie zasilające do 3,3 V o obciążalności do 250 mA. Układ zbudowano w oparciu o ADP2108 (U3). Dioda LD1 sygnalizuje zasilanie GPIO.
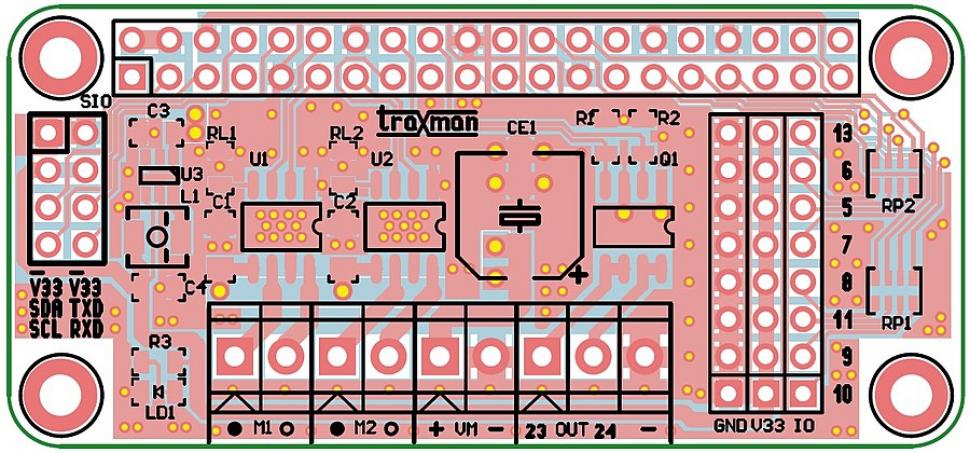
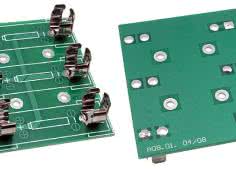
Rysunek 3. Schemat montażowy drivera silników dla Raspberry PI Zero
Dodatkowo, moduł umożliwia wyprowadzenie interfejsu I²C, portu szeregowego na złącza szpilkowe zgodnie z Arduino Bricks ułatwiając wygodne dołączenie współpracujących modułów komunikacyjnych np. opisywanych w EP I²C lub Xbee. Uwaga! Sygnały GPIO Raspberry PI Zero zgodne są ze standardem 3,3 V i dołączenie napięcia 5 V spowoduje uszkodzenie GPIO.
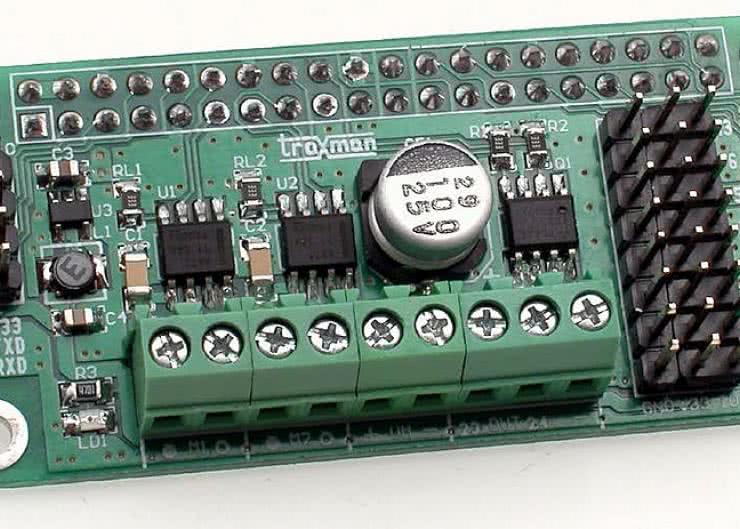
Driver zmontowano na niewielkiej, dwustronnej płytce drukowanej. Jej schemat montażowy pokazano na rysunku 3. Montaż jest typowy i nie wymaga opisywania. Należy tylko poprawnie przylutować pady termiczne układów U1 i U2. W wypadku "forsownej" pracy modułu warto układy driverów i tranzystor wyposażyć w niewielkie radiatory przyklejone klejem termoprzewodzącym.
Adam Tatuś, EP