Zaloguj
Zaloguj



Kompletny sterownik taśmy składa się z dwóch urządzeń: nadajnika i odbiornika.
Nadajnik
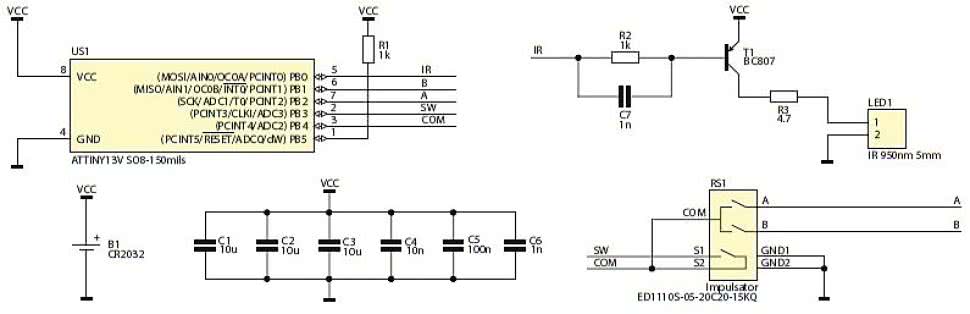
Schemat nadajnika zdalnego sterowania, tzw. pilota, pokazano na rysunku 1. W pilocie znajduje się mikrokontroler ATtiny13V. Sufiks "V" oznacza rozszerzony zakres napięć zasilających, od 1,8 V do 5,5 V. Dzięki temu, możliwe jest zasilanie go z pojedynczej baterii CR2032 o napięciu 3 V. Dzięki temu, pilot może być lekki i niewielki.
Dioda nadawcza IR wymaga impulsów prądu o znacznym natężeniu. Sygnał wychodzący z mikrokontrolera wymaga wzmocnienia za pośrednictwem tranzystora T1. Rezystor R2 ogranicza prąd jego bazy, a kondensator C7 przyśpiesza jej przeładowywanie, czyli zatykanie i nasycanie tranzystora.
Rysunek 1. Schemat ideowy pilota (nadajnika) |

Rysunek 2. Charakterystyka częstotliwościowa fi ltru wejściowego układu TSOP4836 (źródło: datasheet Vishay) |
Prąd bazy tego tranzystora to ok. 2 mA, zaś prąd diody nadawczej to ok. 70 mA. Wynika z tego, że wzmocnienie prądowe T1 nie powinno być mniejsze od 100, aby ten prawidłowo wchodził w stan nasycenia. Ten warunek spełnia każdy BC807, bez konieczności wyszczególniania grupy.
Wszystkie wyprowadzenia enkodera zostały podłączone do mikrokontrolera. W typowym zastosowaniu, elektroda wspólna podłączana jest do masy, zaś pozostałe do dodatniego bieguna zasilania, za pośrednictwem rezystorów podciągających.
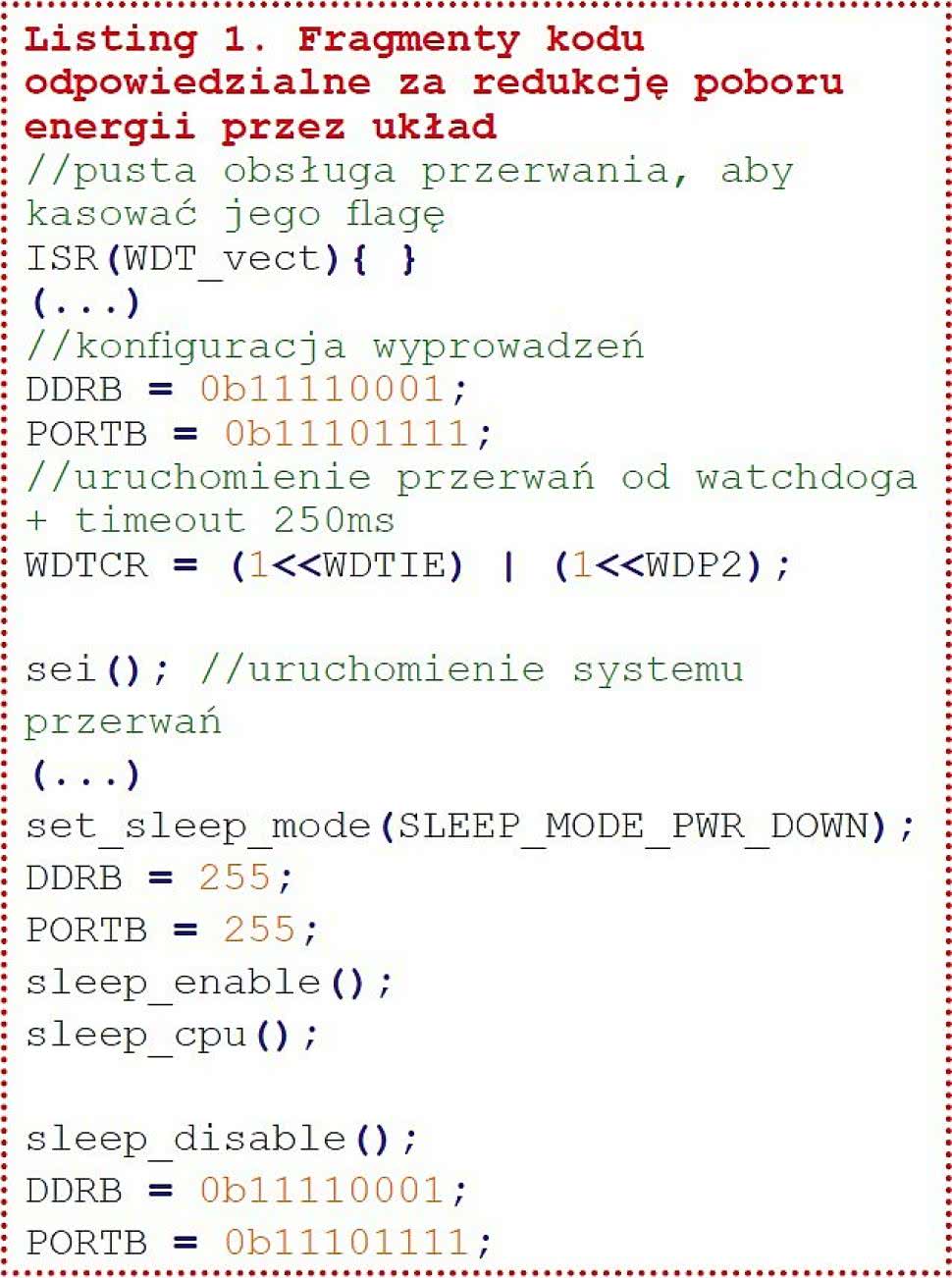
Listing 1. Fragmenty kodu odpowiedzialne za redukcję poboru energii przez układ
Pomimo oczywistej prostoty, tutaj taka realizacja jest niemożliwa do przyjęcia: jeżeli któryś ze styków enkodera ustawi się w takim położeniu, że zapewni długotrwały przepływ prądu przez rezystor podciągający, wówczas bateria ulegnie rozładowaniu w szybkim tempie, pomimo zredukowania poboru energii przez sam mikrokontroler.
Algorytm pracy zastosowany w tym układzie sprowadza się do okresowego (co 250 ms) wyprowadzania mikrokontrolera ze stanu głębokiego uśpienia i sprawdzania, czy zmienił się stan któregokolwiek ze styków A, B, lub SW.
Po wybudzeniu, wyprowadzenie wspólne (COM) jest ściągane do masy, przez co odczyt poziomu logicznego z pozostałych wejść, mających wewnętrzne rezystory podciągające, jest możliwy. Jeżeli zmiany nie ma, wyprowadzeniu COM zostaje nadany logiczny stan "1" i mikrokontroler przechodzi do trybu energooszczędnego. W razie wystąpienia zmiany, ponowne uśpienie zostaje odroczone na ok. 0,5 s od detekcji ostatniego ruchu na stykach. W tym czasie, układ znajduje się w stanie aktywnym i natychmiastowo reaguje na polecenia użytkownika.
Takie działanie jest możliwe dzięki zastosowaniu przerwania od układu watchdog, który pracuje z oddzielnym oscylatorem o niskiej częstotliwości. Generuje on okresowo przerwania, które uruchamiają uśpiony rdzeń. Na listingu 1 znajdują się fragmenty kodu, odpowiedzialne za konfigurację układu watchdog oraz przygotowanie do uśpienia i pracy po wybudzeniu.
Wymienione czynności pozwoliły na zredukowanie poboru prądu do wartości średniej oscylującej wokół 5 mA. Zakładając, że typowa bateria CR2032 ma pojemność 200 mAh, powinna ona wystarczyć na ponad 4 lata pracy takiego pilota. Pobór prądu w stanie aktywnym (po wybudzeniu) wzrasta do ok. 600 mA, zaś w czasie nadawania wynosi ok. 20 mA.
Sposób, w którym przebiega komunikacja w podczerwieni, opiera się na standardzie RC5 w jego typowym wydaniu. Nie zachodzi tutaj potrzeba specjalnego kodowania informacji bądź przesyłania długich ciągów danych, zatem ten prosty i doskonale znany standard powinien sprawdzić się bez zarzutu.
Takie rozwiązanie pozwala na sterowanie jasnością nie tylko za pośrednictwem opisanego tu pilota, lecz również każdego uniwersalnego, który jest wyposażony w diodę emitującą światło o długości fali 950 nm lub zbliżonej. Adres tego urządzenia został na sztywno ustawiony na 11 - niewykorzystany, zatem nie powinno być konfl iktów z innymi urządzeniami RTV w pomieszczeniu. Komendy oraz funkcje przycisków (odpowiadające pilotowi do TV) zostały zestawione w tabeli 1. Bit "toggle" nie jest sprawdzany przez odbiornik.

Tabela 1. Komendy standardu RC5 wysyłane przez pilota.
Do wytwarzania fali prostokątnej o częstotliwości 36 kHz został wykorzystany tryb CTC licznika Timer0, który jest taktowany bezpośrednio z zegara rdzenia. Ponieważ bity zabezpieczające należy pozostawić w ustawieniu fabrycznym, owa częstotliwość wynosi 1,2 MHz.
Ustawienie wartości rejestru OCR0A = 15 zaowocowało generacją sygnału o częstotliwości ok. 36,4 kHz. Niewielkie odstępstwo (rzędu 1%) nie szkodzi w stosowaniu scalonego odbiornika na częstotliwość 36 kHz, jak użyty tutaj TSOP4836, ponieważ filtr częstotliwości nośnej w nim zawarty nie jest tak bardzo selektywny (rysunek 2).
Dodatkowy rezystor R1, podciągający wyprowadzenie zerowania do dodatniego bieguna baterii, został dodany w celu uniknięcia nieprawidłowości w działaniu układu, wywołanych przez upływności montażowe oraz gromadzące się ładunki elektrostatyczne. Nie ma on wpływu na pobór prądu przez układ.
Obsługa pilota polega na przekręcaniu osi enkodera w prawo (zwiększenie jasności) bądź w lewo (zmniejszanie jasności) oraz wciśnięcie jej (wyłączenie taśmy LED).
Wykaz elementówNadajnik Rezystory: Kondensatory: Półprzewodniki: Inne: Odbiornik Rezystory: Kondensatory: Półprzewodniki: Inne: |
Odbiornik
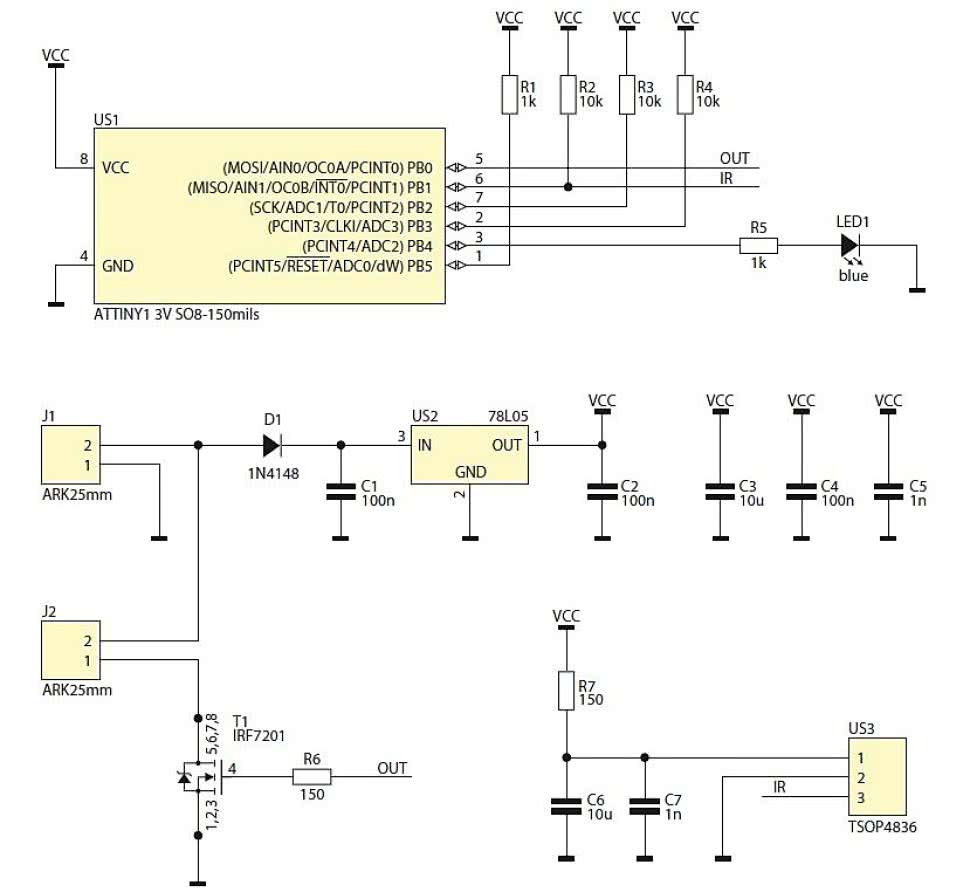
Rysunek 3. Schemat ideowy odbiornika
Schemat ideowy odbiornika jest na rysunku 3. Podobnie, jak w nadajniku, tutaj również pracuje mikrokontroler ATtiny13. Jest on zasilany stabilizowanym napięciem o wartości 5 V, pochodzącym ze scalonego stabilizatora LM78L05. Dioda D1 zabezpiecza stabilizator przed uszkodzeniem, które mogłaby wywołać omyłkowa zmiana polaryzacji zasilania.
Taśma LED jest sterowana poprzez tranzystor MOSFET-N typu IRF7201. Jest on dostępny w obudowie SO8, co jest istotne z punktu widzenia miniaturyzacji układu. Liczne wyprowadzenia drenu ułatwiają odprowadzanie zeń ciepła. Niskie napięcie progowe (1 V) pozwala na sterowanie go bezpośrednio z wyjścia mikrokontrolera.
Cechuje się rezystancją otwartego kanału na poziomie 30 mV oraz może przewodzić prąd o wartości nawet 7,3 A (przy temperaturze obudowy 25°C). To przekłada się na maksymalną moc zasilanej taśmy: 87 W w instalacji 12 V oraz 175 W dla napięcia 24 V. Rezystor R6, włączony szeregowo z bramką, zmniejsza prąd płynący przez wyjście mikrokontrolera w momencie przełączania.
Do odbioru transmisji w podczerwieni służy wspomniany już wcześniej odbiornik TSOP4836. Jego zasilanie jest filtrowane przez prosty obwód RC składający się z elementów R7, C6, C7, co rekomenduje nota katalogowa. Odbiór komunikatu RC5 o poprawnym adresie sygnalizowane jest pojedynczym błyśnięciem diody LED1.
Po zamknięciu układu w transparentnej obudowie barwy niebieskiej, jej światło jest dobrze widoczne, a jednocześnie nie jest irytujące dla oczu. Układ odbiornika pobiera w stanie czuwania prąd o wartości ok. 8 mA. Nie zapamiętuje on nastaw jasności: po zaniku zasilania i ponownym jego załączeniu, startuje z wyłączoną taśmą.
Montaż i uruchomienie
Obydwa układy - nadajnika i odbiornika - zostały zmontowane na jednostronnych płytkach drukowanych o wymiarach 31 mm×45 mm. Ich schematy montażowe zamieszczono na rysunku 4 i rysunku 5.
Montaż należy przeprowadzić zaczynając od elementów lutowanych powierzchniowo. Następnym krokiem jest wlutowanie zwor z drutu: na płytce nadajnika jedna, na płytce odbiornika dwie. W ostatniej kolejności, montuje się elementy przewlekane, poczynając od najniższych. Diodę nadawczą należy przylutować na krótkich wyprowadzeniach i zagiąć ją równolegle do powierzchni płytki, co będzie widoczne na zdjęciu.
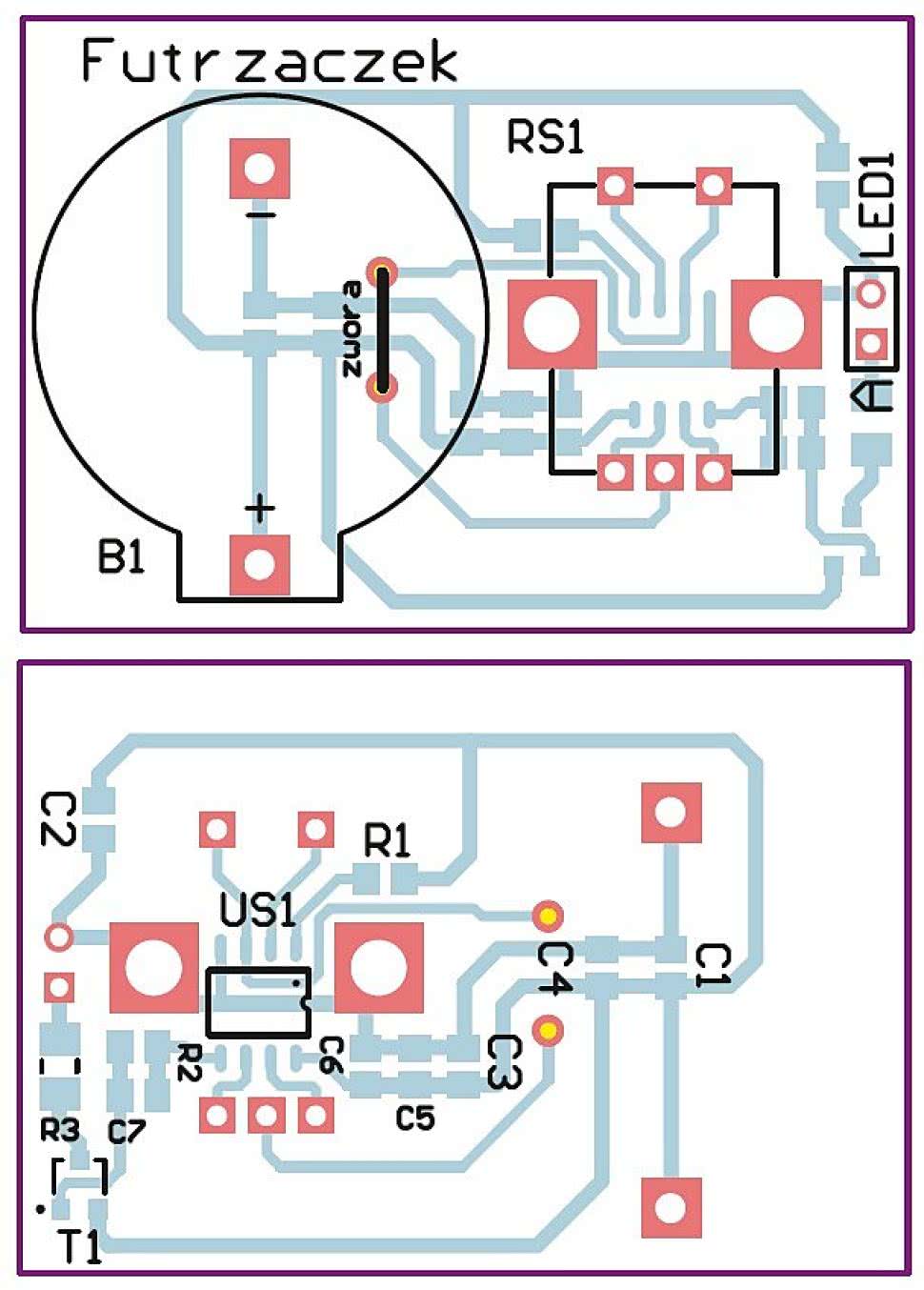
Rysunek 4. Schemat montażowy płytki nadajnika |
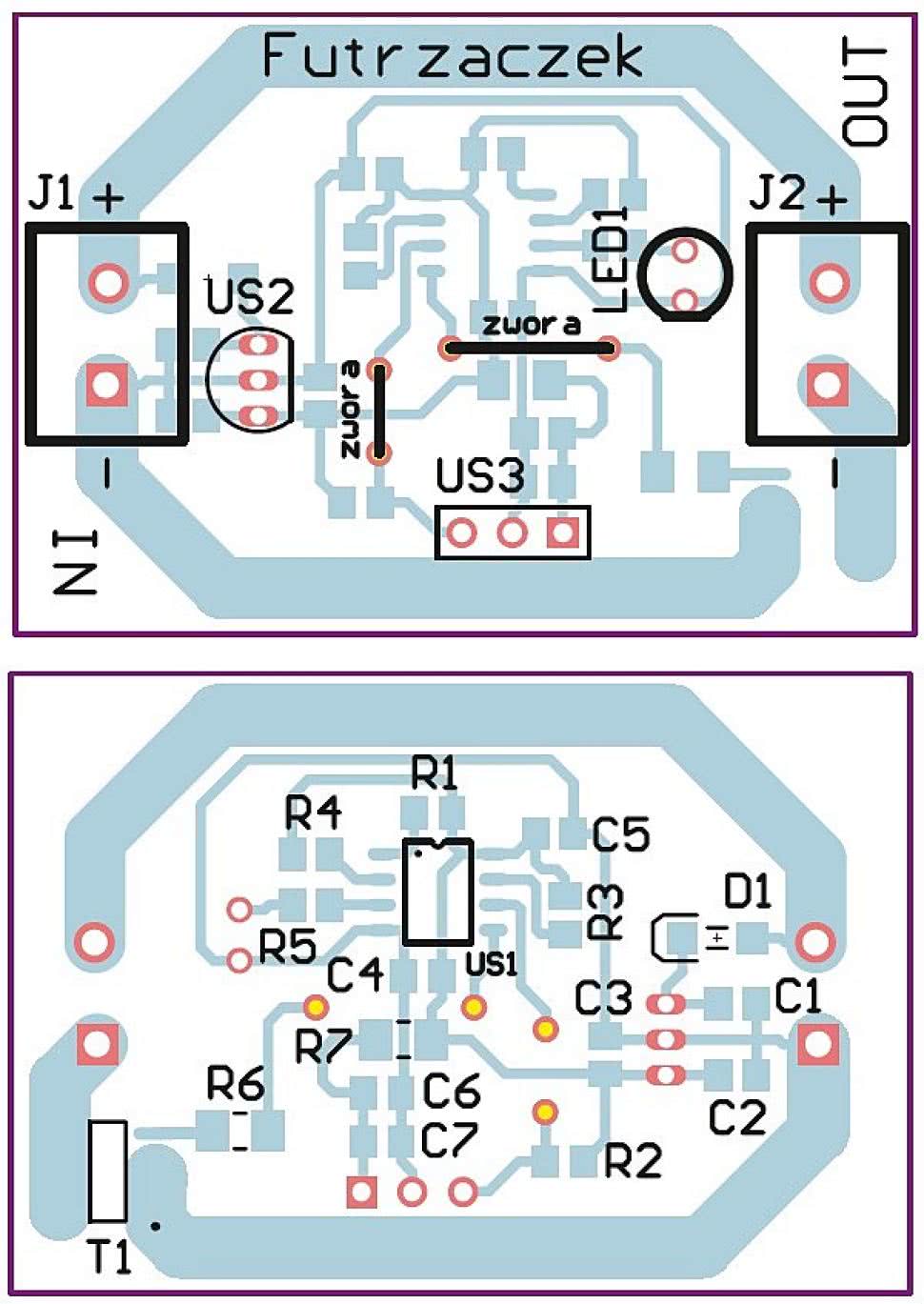
Rysunek 5. Schemat montażowy płytki odbiornika |
Takie wymiary płytek pozwalają na zamknięcie gotowych układów w niewielkich obudowach KM-10N. Transparentna, niebieska obudowa przepuszcza promieniowanie podczerwone oraz światło niebieskiej diody, wbudowanej w odbiornik.
Dzięki temu, w obudowie nadajnika należy wywiercić jedynie jeden otwór (na oś enkodera), a w obudowie odbiornika dwa (na przewody). Płytki są dopasowane do obudów i nie wymagają żadnego dodatkowego mocowania. Zmontowane płytki pokazano na fotografii 6 i fotografii 7.

Fotografia 6. Zmontowany nadajnik |

Fotografia 7. Zmontowany odbiornik |
Czynności uruchomieniowe sprowadzają się do zaprogramowania pamięci Flash obydwu mikrokontrolerów. Ponadto, w przypadku układu odbiornika, należy wyłączyć bit CKDIV8. Pozostałe bity zabezpieczające należy pozostawić w ustawieniu fabrycznym.
Po zaprogramowaniu, układy gotowe są do pracy. Zasięg pilota wynosi ok. 10 m (w otwartej przestrzeni), dzięki czemu pozostaje duża swoboda w doborze miejsca ukrycia odbiornika, aby światło podczerwone mogło padać na układ TSOP4836.
Dla ciekawskich
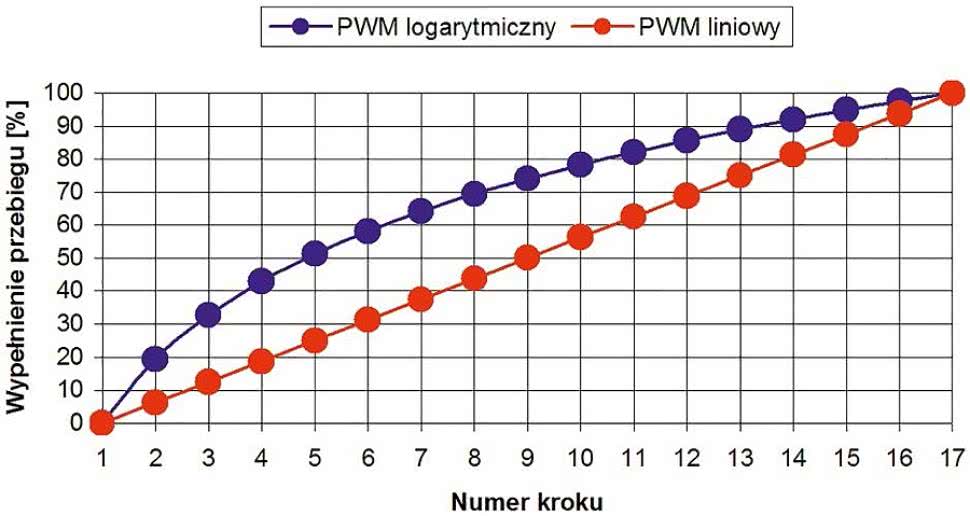
Rysunek 8. Zmiana wypełnienia przebiegu PWM.
Wytwarzany przez mikrokontroler sygnał PWM ma częstotliwość ok. 290 Hz, przez co migotanie diod w taśmach jest niewidoczne. Rozdzielczość regulacji wypełnienia wynosi 1%. Liczba dostępnych dla użytkownika kroków wynosi 17, przy czym, pierwszy odpowiada wyłączeniu, a ostatni pełnemu rozświetleniu.
Ten "nadmiar" został przeznaczony do zrealizowania liniowej regulacji jasności. Ludzkie zmysły odbierają wrażenia jako zmieniające się liniowo, jeżeli w rzeczywistości zmiany te zachodzą logarytmicznie. Przykładem jest regulacja głośności, w której stosuje się potencjometry o charakterystyce logarytmicznej. Brak tej korekcji powoduje, że duża zmiana (odczuwalnie) zachodzi na relatywnie małym przedziale.
Rysunek 8 przedstawia wypełnienie przebiegu PWM, liczone liniowo oraz logarytmicznie. Widać na nim, że przy podejściu logarytmicznym, 75% zakresu zmienności wypełnienia jest pokryte pierwszą połową kroków. Pozostałe 25% zostało rozłożone po drugiej połowie. Podejście liniowe rozkłada wypełnienie równomiernie - oraz łatwo jest je zaimplementować, lecz uzyskany efekt jest zauważalnie gorszy.
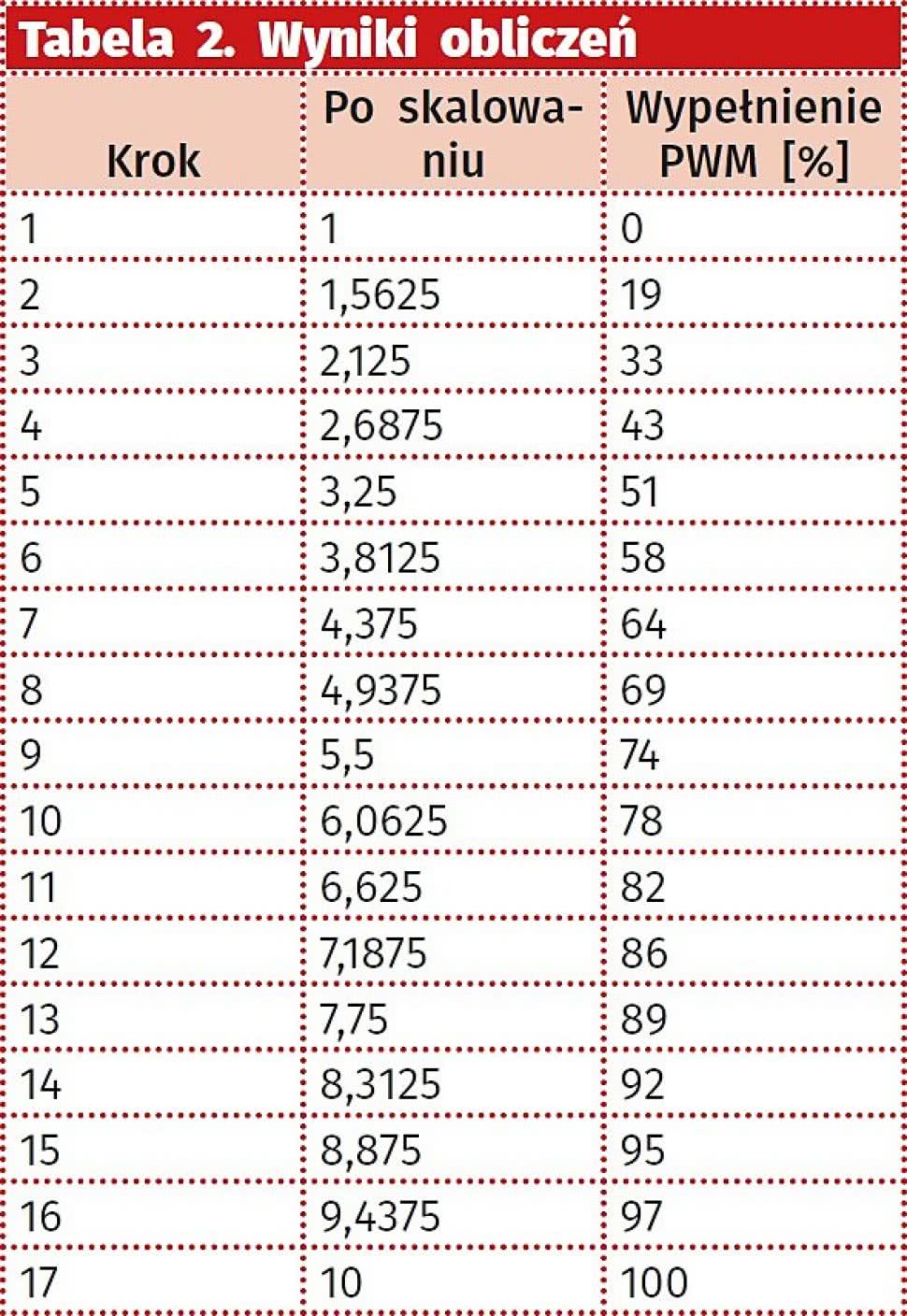
Tabela 2. Wyniki obliczeń
Zaimplementowanie w mikrokontrolerze funkcji, która na bieżąco obliczałaby wypełnienie, znacznie zwiększyłoby objętość programu, co z kolei wymagałoby zastosowania innego układu. Wartości wypełnienia zostały obliczone i wpisane "na sztywno" do tablicy przez co cały program zajmuje ok. 0,5 kB. Poniżej znajduje się algorytm pozwalający na wygodne dokonanie obliczeń, co może być użyteczne w niejednym projekcie.
Pierwszym krokiem jest przeskalowanie numeru kroku (zmiennym w zakresie 1-17) na odpowiadającą mu liczbę z zakresu [1;10]. Taki zakres zmienności powoduje, że logarytm dziesiętny, którym w takich wypadkach zwyczajowo się posługujemy, przyjmie wartości z zakresu [0;1], co jest bardzo wygodne z punktu widzenia przeliczenia na procentową wartość wypełnienia. Owe przeskalowanie najprościej jest zrobić za pomocą zwykłej funkcji liniowej: (k - numer kroku)
|
Następnie, uzyskane wartości należy zlogarytmować i pomnożyć przez 100, jeżeli trzeba uzyskać wypełnienie w procentach:
Rezultatem opisanych wyżej obliczeń jest tabela, której ostatnią kolumnę należy napisać w programie jako tablicę i odwoływać się do kolejnych elementów w niej. Wyniki obliczeń przeprowadzonych na potrzeby niniejszego projektu znajdują się w tabeli 2.
Michał Kurzela, EP