Zaloguj
Zaloguj



Przy zasilaniu urządzenia pojedynczym napięciem byłoby idealnie, gdyby po włączeniu zasilania kształt napięcia za stabilizatorem był – niezależnie od zastosowanego typu – zawsze taki sam. Niestety, jest to możliwe tylko „na papierze”, ponieważ nawet przy zastosowaniu tych samych komponentów, będą się one różniły ze względu na tolerancję ich wykonania. O ile ma to mniejsze znaczenie w wypadku układów scalonych, o tyle na pewno dotyczy kondensatorów pracujących w filtrze zasilania. Dlatego – jak wspomniano we wstępie – stosuje się układy komparatorów, które pozwalają na uruchomienie układu dopiero po osiągnięciu przez napięcie zasilające pewnej „bezpiecznej” wartości.
Układy scalone wzmacniaczy mocy audio zasilanie napięciem symetrycznym zwykle są niewrażliwe na sekwencję załączania napięcie zasilającego. Mają wbudowane odpowiednie obwody, które zabezpieczają je nawet przy uszkodzeniu jednej połówki napięcia. Z kolei wzmacniacze operacyjne mają połączenie z masą poprzez oporniki polaryzujące o rezystancji rzędu kilkudziesięciu kiloom lub więcej, przez które płynie niewielki prąd raczej niemający możliwości uszkodzenia obwodów półprzewodnikowych. Sekwencja załączania napięcia zasilającego będzie miała znacznie większe znaczenie dla układów, w których komponenty półprzewodnikowe są bezpośrednio połączone z masą. W takich układach może dojść do uszkodzenia, bo zgodnie z zamierzeniami projektantów układu scalonego, prąd powinien przepływać od napięcia dodatniego do napięcia ujemnego, a nie od któregoś z nich do masy. Po załączeniu napięć zasilających, jeśli jedno z nich pojawi się wcześniej niż drugie, prąd będzie „próbował” płynąć zgodnie z zamierzeniami konstruktorów, ale nie będzie to możliwe, ponieważ odpowiednie napięcie jeszcze nie będzie załączone. Jeśli impedancja wyjściowa jeszcze niedziałającego zasilacza (stabilizatora) jest niewielka, to prąd może wypływać z lub wpływać do jego wyjścia i wówczas nie powinno być problemu, bo zasilany układ scalony zwykle może „poczekać” na pojawienie się drugiej połówki napięcia. Niestety, zwykle wyjścia większości stabilizatorów napięcia pozostają w stanie wysokiej impedancji, jeśli ten nie osiągnie znamionowych warunków pracy. I dlatego, jeśli tylko jedno ze źródeł napięcia zasilacza symetrycznego jest aktywne, to przepływ prądu w normalnym kierunku zostaje zablokowany, a napięcie na wyprowadzeniu stabilizatora pozostającym w stanie wysokiej impedancji ma tendencję do podążania w stronę funkcjonującego źródła napięcia, co odwraca polaryzację wewnętrznych obwodów układu scalonego w odniesieniu do wyprowadzenia masy. W wielu wypadkach w takiej sytuacji wewnętrzne złącza zostają spolaryzowane w kierunku przewodzenia, a prąd przepływa przez nie w kierunku masy. W związku z tym, że jest to zupełnie niezamierzona i często przypadkowa droga przepływu prądu, to może on spowodować zjawisko prądu lawinowego i przepalenie złącza lub co najmniej narażenie go na przeciążenia powodujące skrócenie czasu funkcjonowania układu lub uszkodzenie.
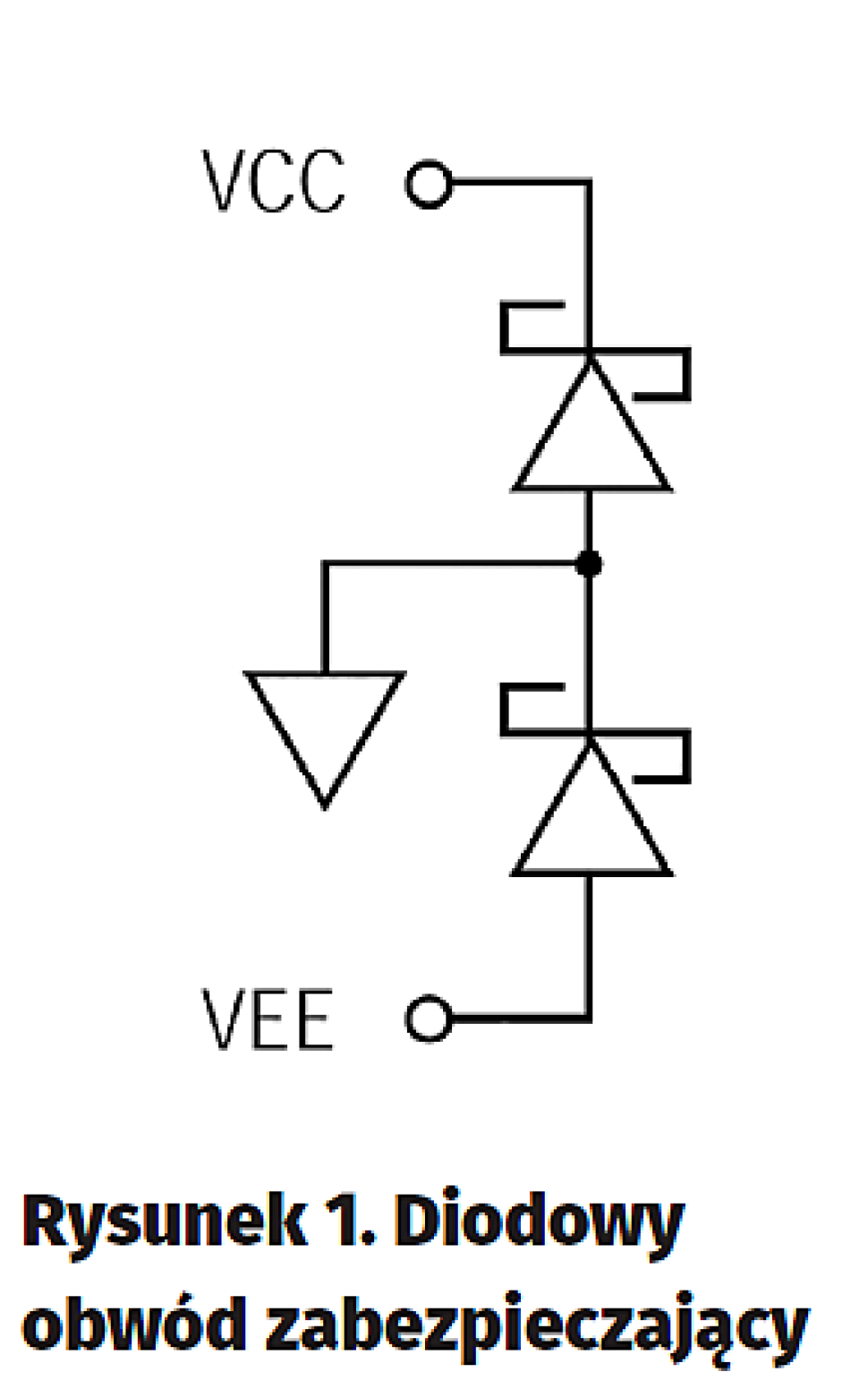
Systemy zasilane pojedynczym napięciem dodatnim i pojedynczym napięciem ujemnym mogą być łatwo zabezpieczone przed uszkodzeniem poprzez zastosowanie nieskomplikowanego obwodu zbudowanego z komponentów dyskretnych, pokazanego na rysunku 1. W jego budowie zastosowano diody Schottky włączone w obwód zasilania, który załączy się wcześniej, niż złącza krzemowe wewnątrz chronionego obwodu scalonego i dzięki temu będzie on przewodził znaczącą część prądu. Diody użyte w tym zabezpieczeniu muszą mieć niewielkie napięcie przewodzenia w najgorszym przypadku prądu zasilania. Na przykład, jeśli ten typ zabezpieczenia zastosowano do ochrony 8-wyjściowej karty I/O, w której każde wyprowadzenie może przewodzić prąd rzędu 200 mA, wówczas diody Schottky użyte w zabezpieczeniu muszą gwarantować napięcie progowe rzędu 0,5 V przy prądzie 1,6 A. W większości wypadków taki prąd nigdy nie popłynie, jednak stosowanie komponentów przewidzianych do pracy w najgorszych warunkach jest dobrą praktyką konstruktorską i daje margines bezpieczeństwa.
Pokazane na rys. 1 zabezpieczenie powinno być stosowane dla źródła zasilania, a nie dla pojedynczych komponentów. Nadaje się do urządzeń, w których napięcie zasilające może wystąpić w przypadkowej kolejności. Jeśli zasilacz został tak zaprojektowany, że jedno z napięć zawsze występuje pierwsze, to odpowiadająca mu dioda Schottky jest zbędna. Z drugiej strony, zastosowanie dwóch diod chroni układy, nawet wówczas, jeśli jeden ze stabilizatorów ulegnie uszkodzeniu.
Zasilanie wieloma napięciami
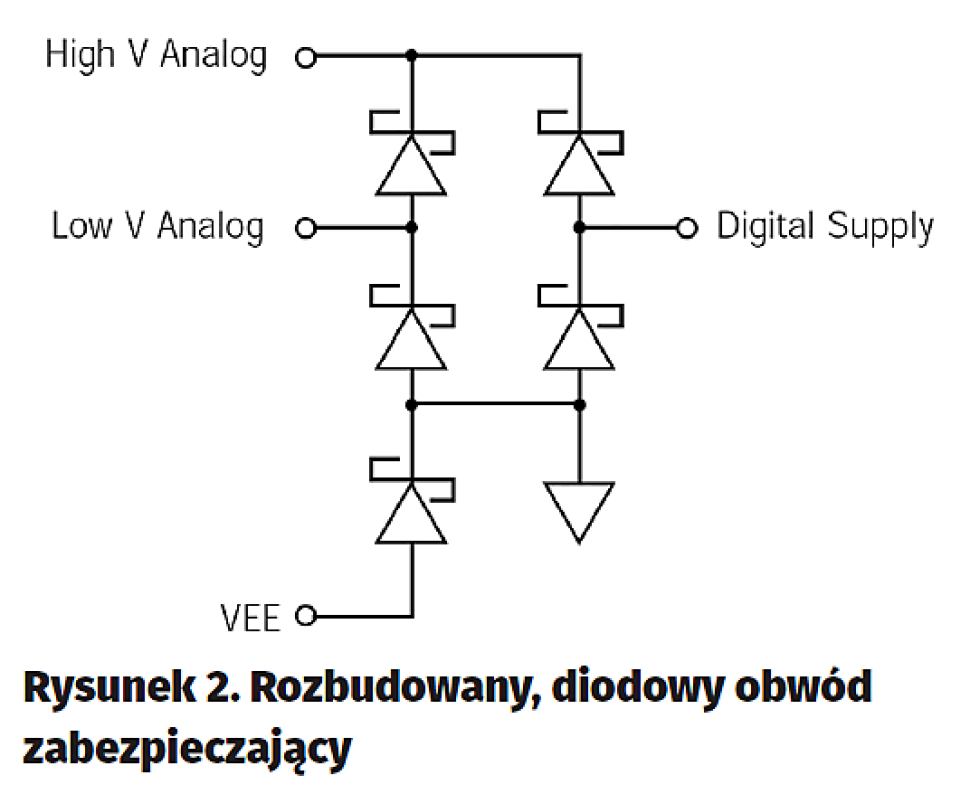
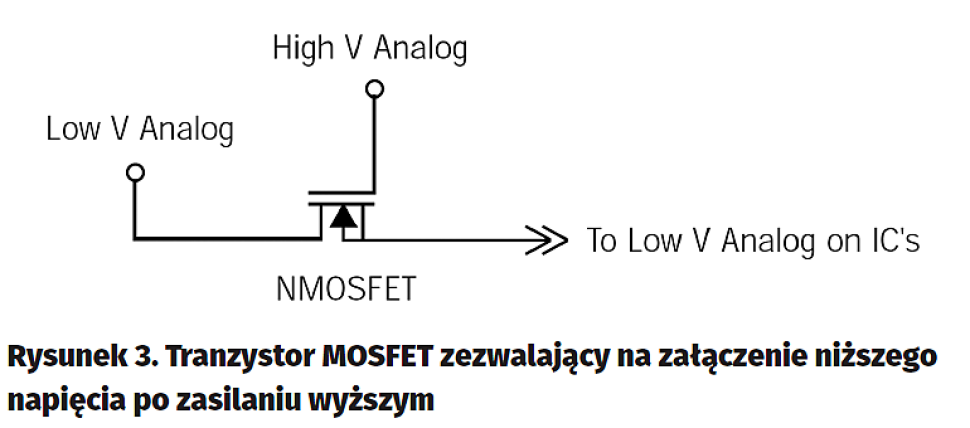
W celu uzyskania poprawnej sekwencji można posłużyć się obwodem zbudowanym z diod Schottky, pokazanym na rysunku 2. Nie zastąpi on wyspecjalizowanego układu scalonego, ale na pewno jest tani i łatwy w budowie. Prąd przewodzenia diod i ich napięcie progowe powinny być dobrane zgodnie z regułą „najgorszego przypadku”. W niektórych zastosowaniach, zwłaszcza przy ograniczonej wydajności prądowej źródła niższego napięcia, można użyć tranzystora MOSFET włączonego jak na rysunku 3. Prezentowany obwód – włączony w szereg z wejściem zasilania – może być stosowany do zabezpieczenia przed sytuacją, w której niże napięcie wystąpi przed wyższym. Aby układ pracował poprawnie, rezystancja przewodzenia tranzystora MOSFET RDS(on) musi być wystarczająco niska przy napięciu UGS występującym pomiędzy niskonapięciową i wysokonapięciową częścią obwodu i przy maksymalnym prądzie, który popłynie przez kanał tranzystora. Jeśli różnica napięcia pomiędzy drenem a źródłem nie jest zbyt wysoka, to należy użyć tranzystora o niskim napięciu bramki.
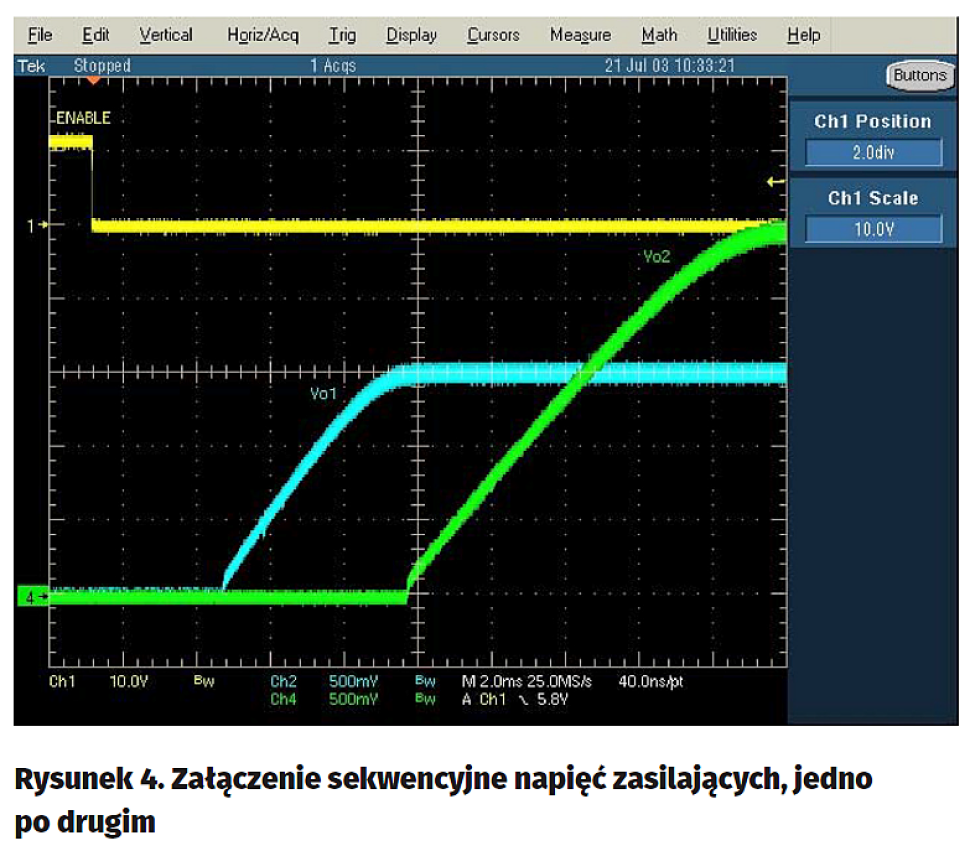
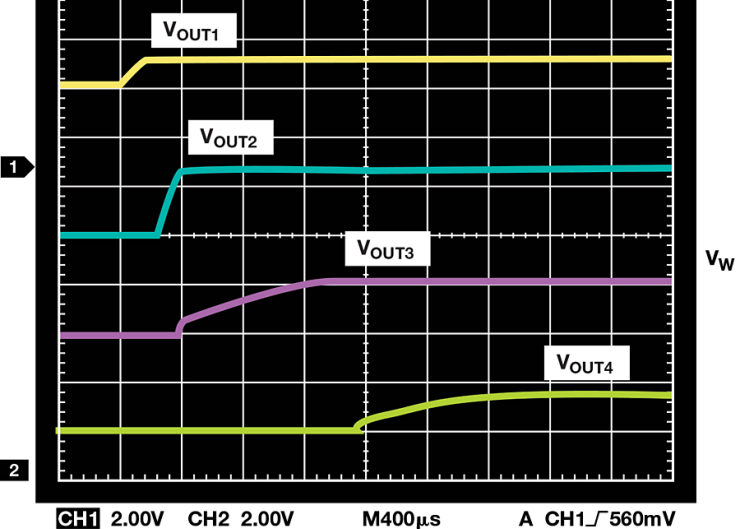
1) Sekwencyjną (sequential), gdy napięcia są załączane jedno po drugim, w określonej kolejności (rysunek 4). Na przykład, napięcie rdzenia, który powinien być zasilony przed włączeniem układów peryferyjnych i przetworników A/C. Przy wyłączeniu napięcia zwykle kolejność zanikania napięć powinna być odwrotna.
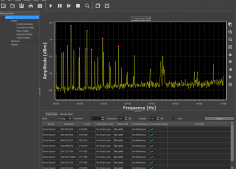
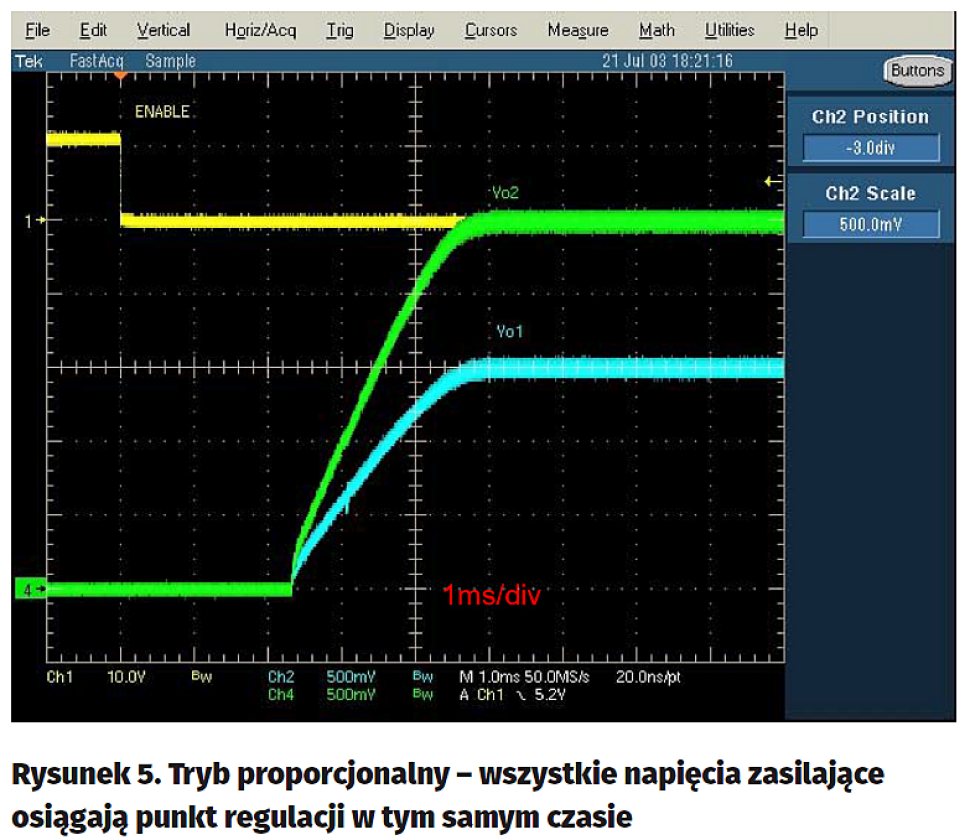
2) Proporcjonalną (ratiometric), gdy wszystkie napięcia zasilające osiągają wartość znamionową w tym samym czasie (rysunek 5). Zbocza napięć pokazane na oscylogramie mają różne czasy narastania, aby punkt regulacji został osiągnięty w przybliżeniu w tym samym czasie. Po wyłączeniu napięcia głównego zbocza opadające obu napięć mają różne nachylenia, aby napięcia zasilające osiągnęły poziom masy w przybliżeniu w tym samym czasie.
Danych na temat wymaganej sekwencji napięć zasilających należy szukać w karcie katalogowej danego procesora czy układu FPGA.
Sekwencery napięć zasilających
Najwygodniejszą metodą dostępną dla wykonania sekwencera napięcia jest zastosowanie specjalizowanego układu scalonego. Są one produkowane przez wielu producentów układów scalonych i dostępne w ich ofercie lub w ofercie ich dystrybutorów. W ramach artykułu zasygnalizujemy, gdzie należy szukać tych układów, ponieważ trudno pokazać pełną ofertę firm, które oferują sekwencery o różnym stopniu komplikacji – programowane za pomocą komponentów zewnętrznych lub z użyciem systemu nadrzędnego – hosta, np. mikrokontrolera. Znajdują one zastosowanie w wielu aplikacjach, w tym na płytach głównych naszych komputerów PC.
Analog Devices
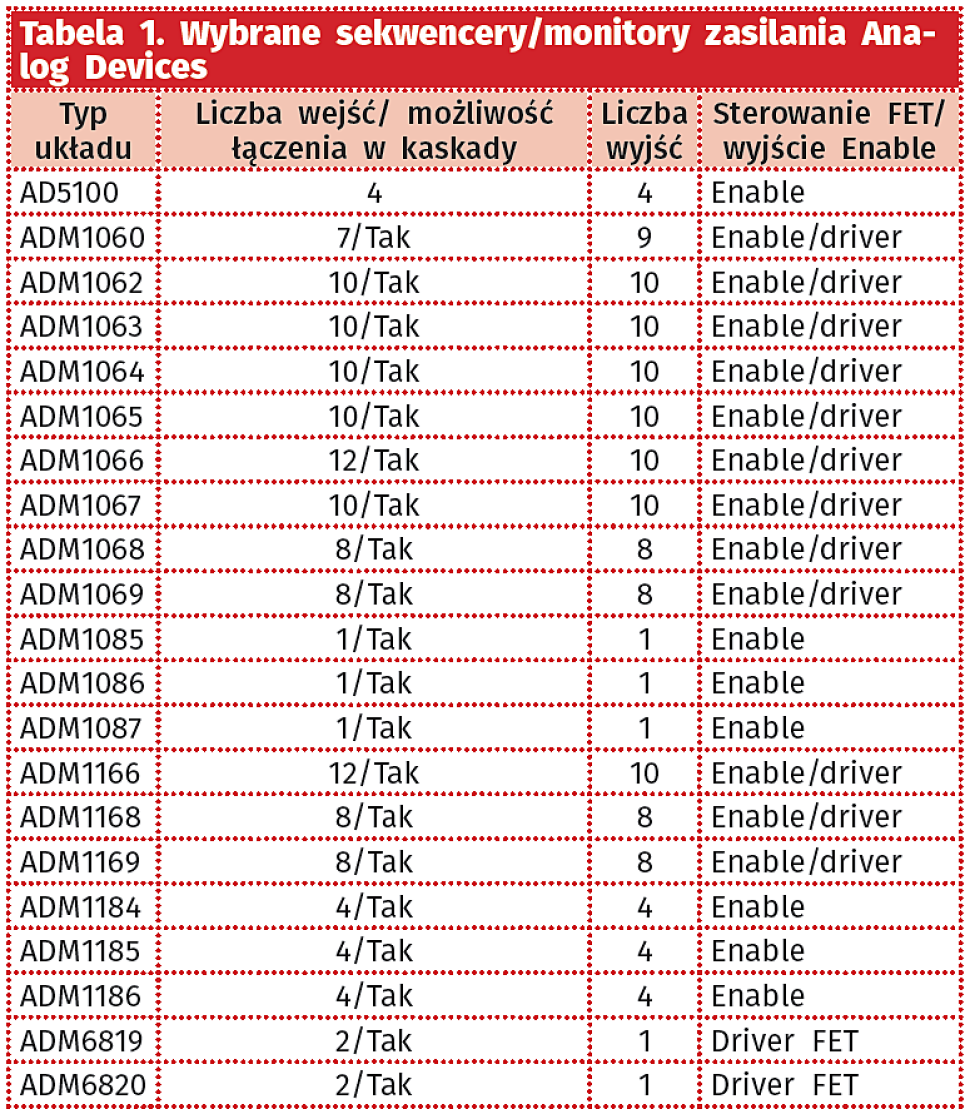
Firma Analog Devices wytwarza dwa rodzaje układów sekwencjonujących zasilanie – analogowe i cyfrowe (tabela 1) różniące się zasadą działania. W budowie pierwszych zastosowano komparatory i funkcjonujące w oparciu o nie układy czasowe, natomiast w drugich przetworniki A/C oraz bloki cyfrowe.
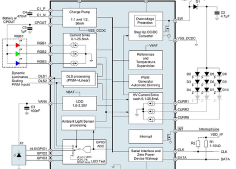
Przykładem rozwiązania analogowego jest 4-kanałowy układ monitorujący ADM1186. Sam układ jest zasilany napięciem z zakresu 2,7…5,5 V. Napięcie monitorowane jest podawane na wejścia VIN1…VIN4 i kontrolowane przez 4 komparatory. Do ich wejść referencyjnych jest doprowadzone wspólne napięcie odniesienia o wartości 0,6 V. Dzielniki rezystorowe ustalają wartość napięcia zadziałania. Układ ma 4 wyjścia typu otwarty dren OUT1…OUT4, które mają niedużą obciążalność i przez to mogą być użyte do załączania kluczy lub stabilizatorów napięcia. W wielu aplikacjach przyda się też wyjście PWRGD sygnalizujące, że wszystkie napięcia monitorowane (wejściowe) mają wartości powyżej ustalonych progów załączenia. Maszyna stanów, zależnie od poziomu na wejściu UP/DOWN, umożliwia załączenie uruchomienie sekwencji załączającej lub wyłączającej. W stanie WAIT START narastające zbocze sygnału na wejściu UP/DOWN wyzwala sekwencję załączającą. W stanie POWER-UP DONE opadające zbocze sygnału na wejściu UP/DOWN wyzwala sekwencję wyłączającą.
Linear Technology
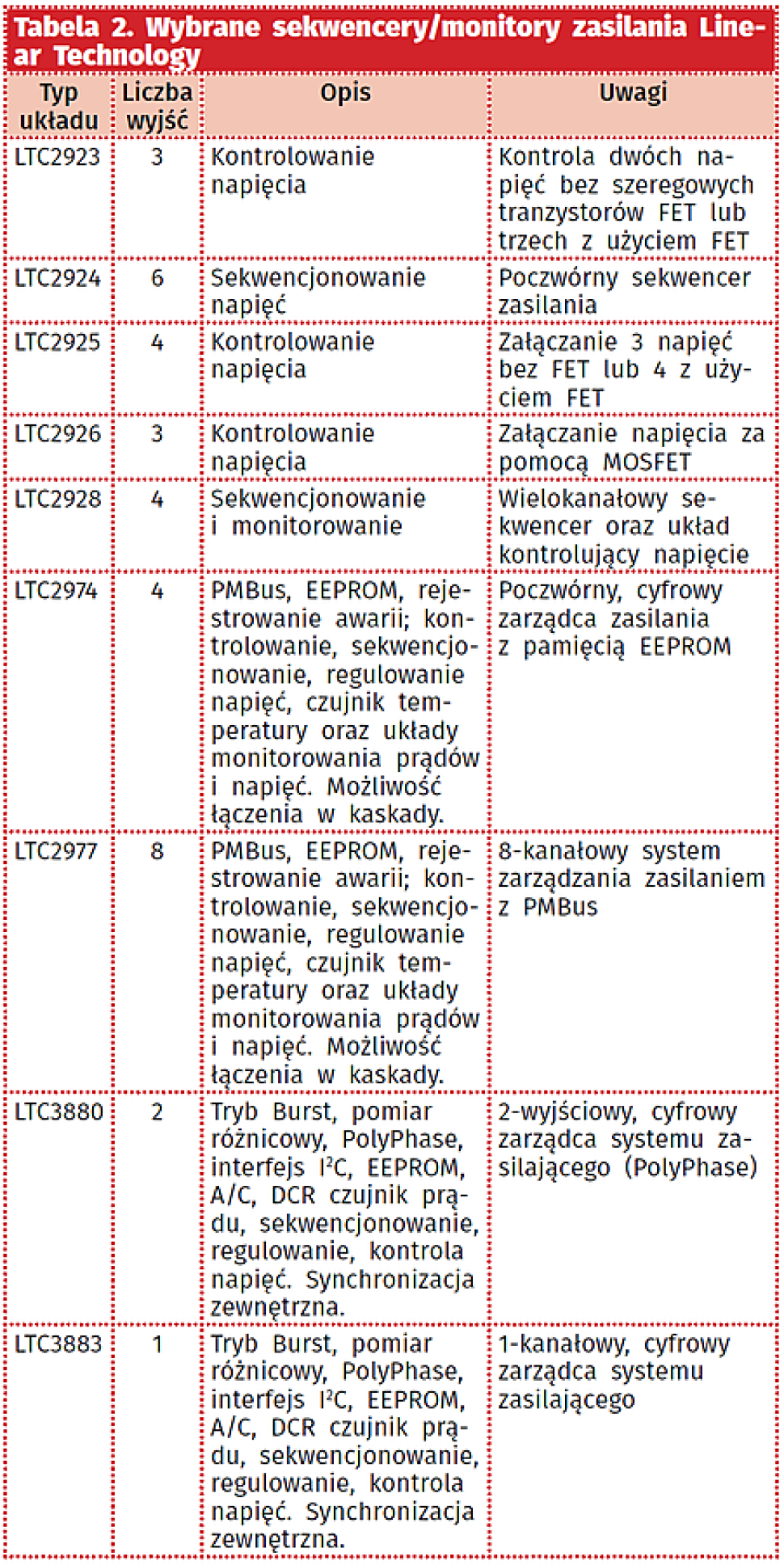
Ofertę Linear Technology zdecydowaliśmy się opisać zaprezentować tuż po Analog Devices, ponieważ firma Analog Devices kupiła LT. Zapewne – jak w wypadku zakupu National Semiconductors przez Texas Instruments – oferta LT zostanie „wchłonięta” przez AD, co może spowodować zastąpienie jednych układów drugimi, opracowanie nowych wersji i inne działania. Skrócony wykazem sekwencerów zasilania firmy LT umieszczono w tabeli 2.
Układ LTC2924 został opracowany do sterowania kluczami tranzystorowymi zbudowanymi w oparciu o MOSFET’y z kanałem N lub układy scalone stabilizatorów z wejściami załączającymi. Może bezpośrednio sterować 4 kanałami zasilacza, ale można za jego pomocą zbudować zasilacz o maksymalnej liczbie 6 kanałów zasilających. Wymaga przy tym niewielkiej liczby komponentów zewnętrznych, jedynie dwóch rezystorów sprzężenia zwrotnego na pojedynczy, kontrolowany kanał oraz jednego rezystora do ustalenia histerezy. W strukturę wbudowano przetwornicę (pompa ładunku) generującą napięcie dla zewnętrznych układów logicznych i do załączania MOSFET’ów. Regulowanie odstępu czasowego pomiędzy załączeniem napięcia zasilającego i początkiem sekwencji osiąga się za pomocą pojedynczego kondensatora dołączonego do wejścia TMR. Drugi kondensator ustala opóźnienie zadziałania detektora poprawności napięcia wyjściowego danego kanału zasilającego. Błędy napięcia oraz błędy sekwencji napięć są sygnalizowane za pomocą wyjścia FAULT. Komparatory wbudowane w układ mają dokładność 1%. Układy LTC2924 mogą być łączone w kaskady w celu sterowania większą liczbą kanałów.
Maxim-Dallas
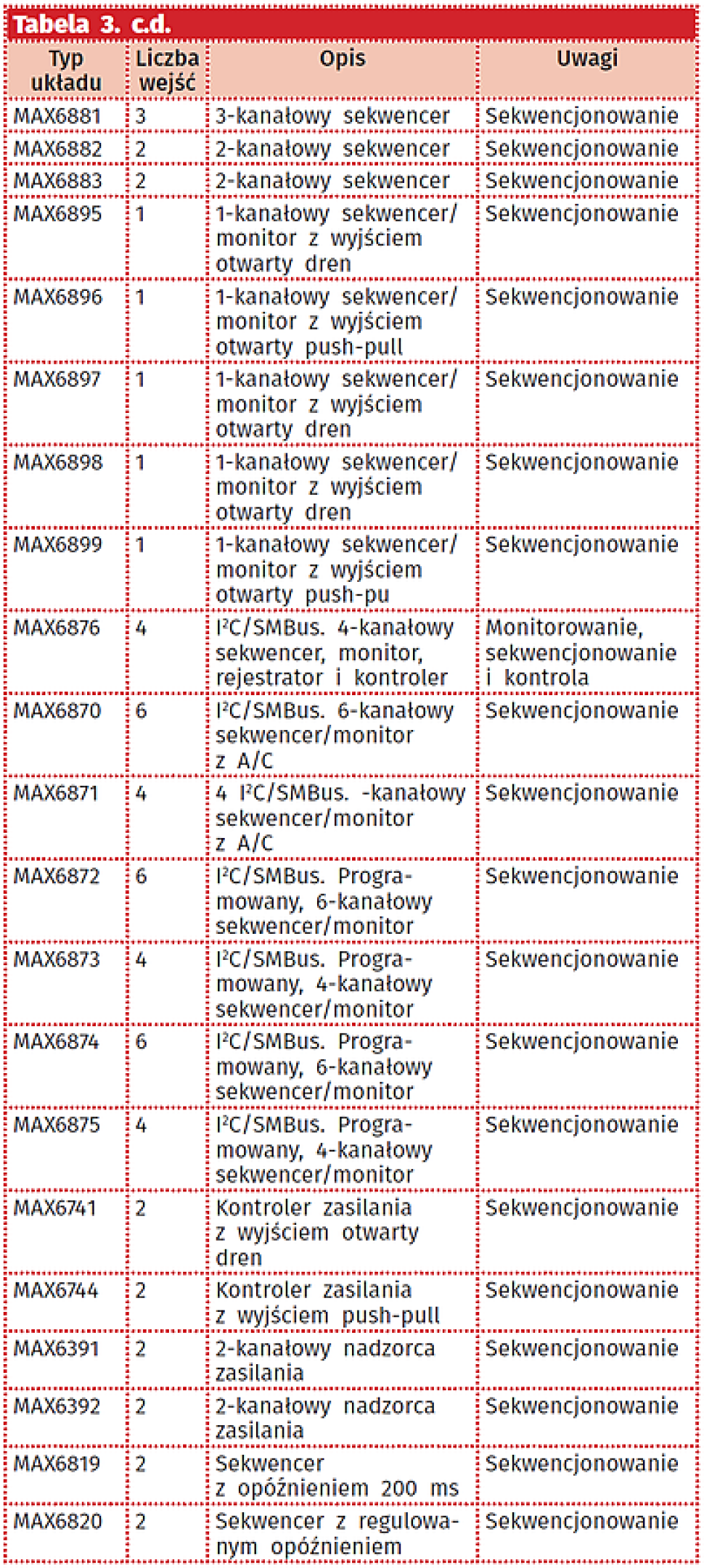
Firma Maxim Integrated oferuje ogromną liczbę układów, od nieskomplikowanych do bardzo rozbudowanych, programowanych za pomocą interfejsu szeregowego (tabela 3).
Przykładem układów sekwencjonujących, 1-kanałowych są MAX1652 z wyjściem typu otwarty dren i bliźniaczy MAX1653 mający wyjście push-pull. Oba należą do rodziny niewielkich układów monitorowania napięcia zasilającego z możliwością budowania sekwencjonowania źródeł napięcia zasilającego. Układy mają możliwość regulowania progu i czasu opóźnienia zadziałania za pomocą komponentów zewnętrznych. Mogą być łączone w kaskady dla potrzeb bardziej rozbudowanych aplikacji. Wejście pomiarowe o dużej impedancji (IN) z progiem wyzwolenia 0,5 V (dokładność 1,8%) pozwala na ustalenie progu zadziałania za pomocą zewnętrznego dzielnika rezystancyjnego. Wyjście (OUT) jest ustawione, gdy napięcie wejściowe przewyższa o 0,5 V ustalony próg. Czas opóźnienia do zmiany wyjścia jest programowany kondensatorem. Wyjście układu MAX16052 jest typu otwarty dren, natomiast MAX1652 jest typu push-pull.
Dla odmiany, układ MAX34462 jest bardzo rozbudowany i może monitorować lub sekwencjonować aż 16 napięć. Układ stale mierzy napięcia wejściowe i sprawdza czy mieszczą się one w dopuszczalnych granicach. Jeśli wystąpi błąd, to układ wyłącza system zasilania w ustalony sposób. MAX34462 może włączać i wyłączać napięcia wyjściowe w dowolnie zaprogramowanej kolejności. Zawiera 16 niezależnych przetworników C/A, które cyfrowo ustalają kształty napięć w poszczególnych kanałach wyjściowych oraz czujnik temperatury. Po skonfigurowaniu funkcjonuje autonomicznie i nie wymaga żadnej interwencji hosta. Komunikacja ze „światem zewnętrznym” odbywa się za pomocą interfejsu szeregowego kompatybilnego z I2C i SMBus. Nastawy są zapisywane we wbudowanej w strukturę pamięci nieulotnej. Aby ułatwić zastosowanie, w strukturę sekwencera wbudowano funktory logiczne.
|
|
|
|


Texas Instruments
Firma Texas Instruments oferuje ogromną liczbę układów przeznaczonych do systemów zasilania. W ostatnich latach oferta tego producenta znacznie powiększyła się na skutek zakupu innych firm. Wybrane układy z oferty Texas Instruments zawiera tabela 4.
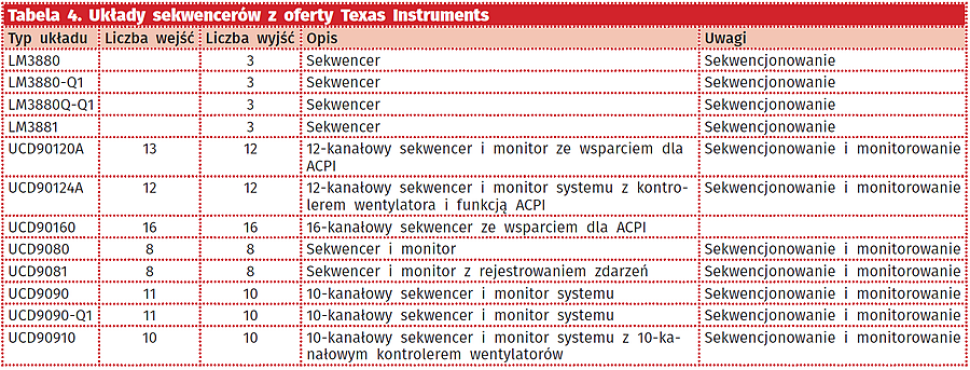
Niejako na przeciwległym biegunie jest nieskomplikowany w aplikacji układ LM3880, niewymagający hosta do sterowania, umieszczony w niewielkiej, 6-wyprowadzeniowej obudowie SOT-23. Układ ma skromne możliwości, ponieważ nie ma funkcji monitorowania i sygnały wyjściowe pojawiają się w pewnych odstępach czasowych, niezależnie od tego, czy napięcie załączane jest obecne, czy też nie. Taką dodatkową kontrolę trzeba dobudować sobie „na zewnątrz” wykorzystując w tym celu wejście ENABLE do sterowania załączanymi zasilaczami. Pomimo miniaturowej obudowy układ ma aż trzy wyjścia, które są załączane i wyłączane zgodnie z sekwencją wybraną w pamięci EEPROM. Poszczególne wyjścia są załączane/wyłączane w wybranych odstępach czasu, od 2…120 ms.
Podsumowanie
W artykule jedynie zasygnalizowano problem sekwencjonowania zasilania i wskazano wybrane rozwiązania układowe. Należy go traktować w roli wskazówki do samodzielnego poszukiwania rozwiązań najlepiej pasujących do aplikacji.
Jacek Bogusz, EP
Bibliografia:
• http://goo.gl/a7Hxg7 • http://goo.gl/OCxxmk • http://goo.gl/77HN88
• http://goo.gl/Lk6ca8 • http://goo.gl/Amxc42 • http://goo.gl/GtxTCk