Zaloguj
Zaloguj




|
Wyzwanie: Rozwiązanie: Autor: |
Zmiana paradygmatu dla radia kognitywnego
W miarę, jak zwiększa się liczba i złożoność systemów komunikacji, wciąż niezwykle istotna pozostaje kwestia optymalizacji użytkowania widma w celu utrzymania niezawodnych kanałów komunikacji. Laboratorium radia definiowanego programowo w Instytucie Georgia Tech Research, bada szereg zagadnień związanych z przetwarzaniem sygnałów i radiem kognitywnym. W systemach CR indywidualne urządzenia definiowane programowo mogą wykrywać dostępne pasma i dostosowywać parametry pracy do otoczenia. Laboratorium przoduje w pracach nad prototypem przestrzennego radia umożliwiającego poprawienie akwizycji danych RF przy rozmaitych zastosowaniach. W nowym paradygmacie wcześniej wspomniane możliwości SDR są integrowane z aspektami świadomości przestrzennej: lokalizacją, rozkładem widmowym, mapowaniem obszarów oraz mobilnością. Przez definiowane programowo algorytmy punkty sieci stają się świadome swojego fizycznego otoczenia – mogą się dostosować i zmienić położenie dla osiągnięcia większej przepustowości, lepszego użytkowania pasma oraz wyższego poziomu bezpieczeństwa.
Integracja sprzętu i oprogramowania
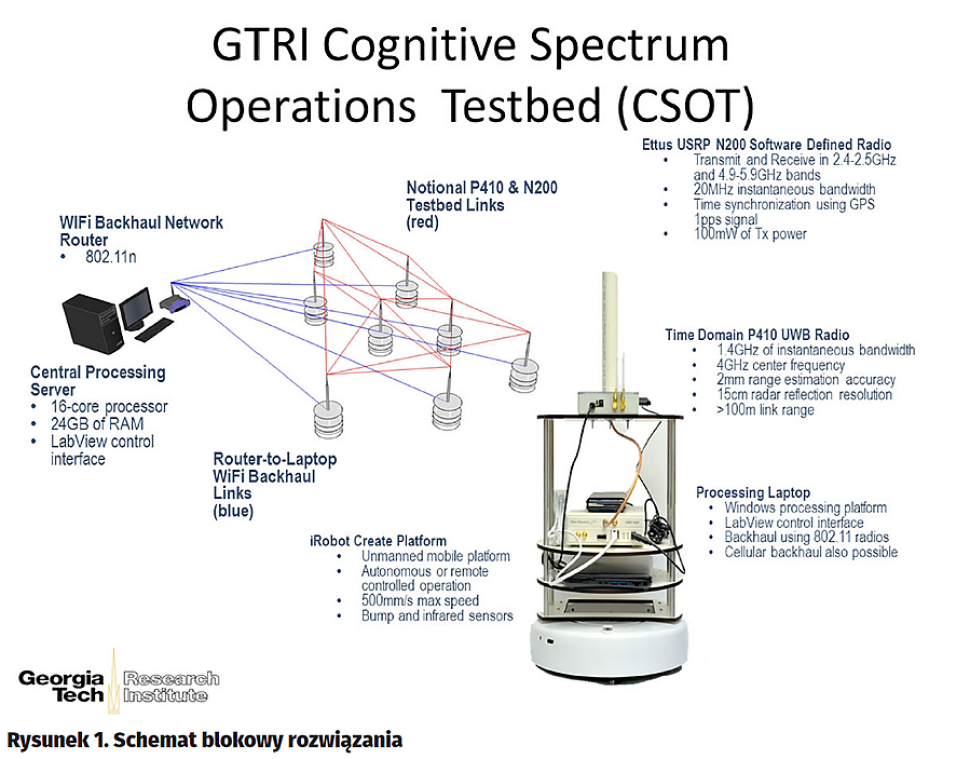
W tym celu stworzony został sieciowy system mobilnych robotów z komputerem pokładowym i możliwością komunikacji. Każda jednostka została zamontowana na platformie iRobot Create, która cechuje się standardową mobilnością i zbiera informacje z czujników ze zderzaka oraz enkoderów na kołach. NI USRP (Universal Software Radio Peripheral) oraz transceiver UWB zapewniają funkcjonalność radia definiowanego programowo oraz odpowiadają za proces analizy widmowej. Wreszcie funkcję kontrolera pełni standardowy laptop, który zbiera dane pomiarowe, wydaje komendy do iRobota oraz działa z klientem SDR, którego kod został stworzony w LabVIEW (rysunek 1).
Szybkie prototypowanie drogą do sukcesu
W rezultacie zostało opracowane elastyczne środowisko testowe, którego sercem jest platforma NI. Uproszczenie elementów kontrolera i SDR umożliwiło szybkie prototypowanie dzięki sprawnemu rozwojowi i testom algorytmów rozkładu widmowego. Funkcjonalność, której dostarczenie wymagało pracy całego zespołu pracującego w językach programowania niskiego poziomu, została wykorzystana przez dwóch studentów użytkujących zintegrowaną sprzętowo-programową platformę NI. Podczas prowadzenia badań niezwykle istotne okazało się wsparcie pracowników NI z działów sprzedaży oraz wsparcia technicznego, którzy swą pomocą przyczynili się do usunięcia początkowych przeszkód.
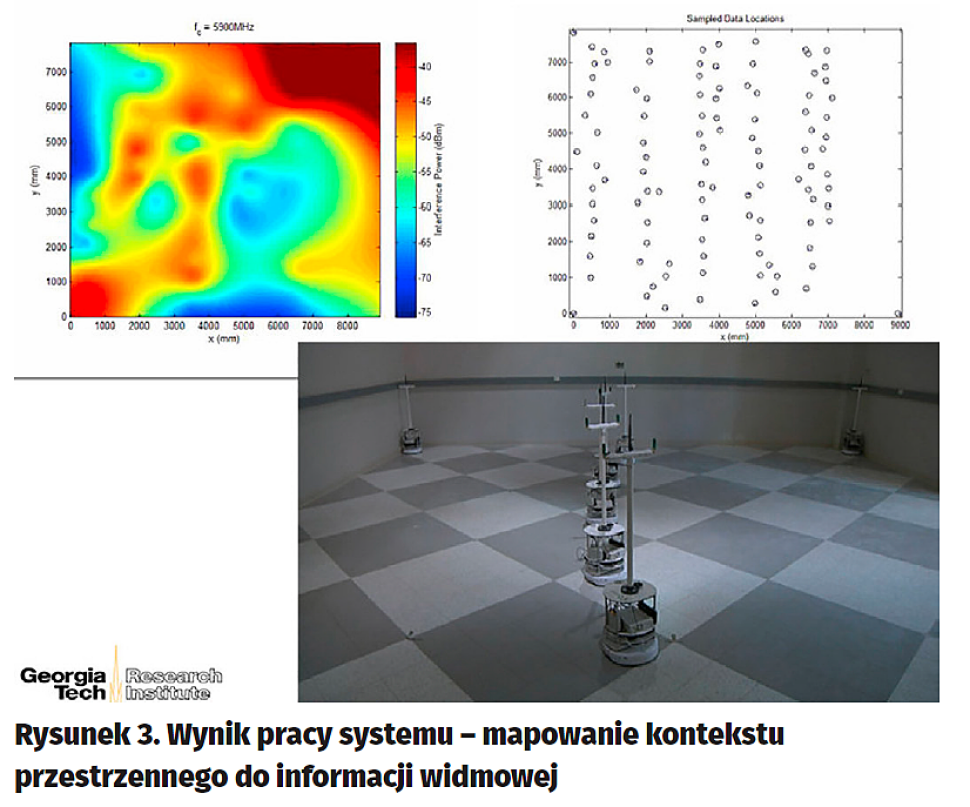
Indywidualne węzły są śledzone w oparciu o zakres pasm UWB, odometrię oraz wielowymiarowe skalowanie[2][3]. Po przetworzeniu danych przez klienta algorytm tworzy ciągłą mapę przestrzenną średniej mocy dla otaczającego obszaru. Taka świadomość przestrzenna mogłaby być wykorzystana dla szeregu metod optymalizacji – między innymi pozycjonowania węzła przekaźnikowego w celu zwiększenia niezawodności komunikacji.
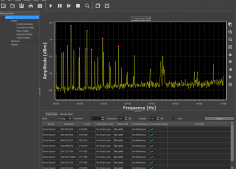
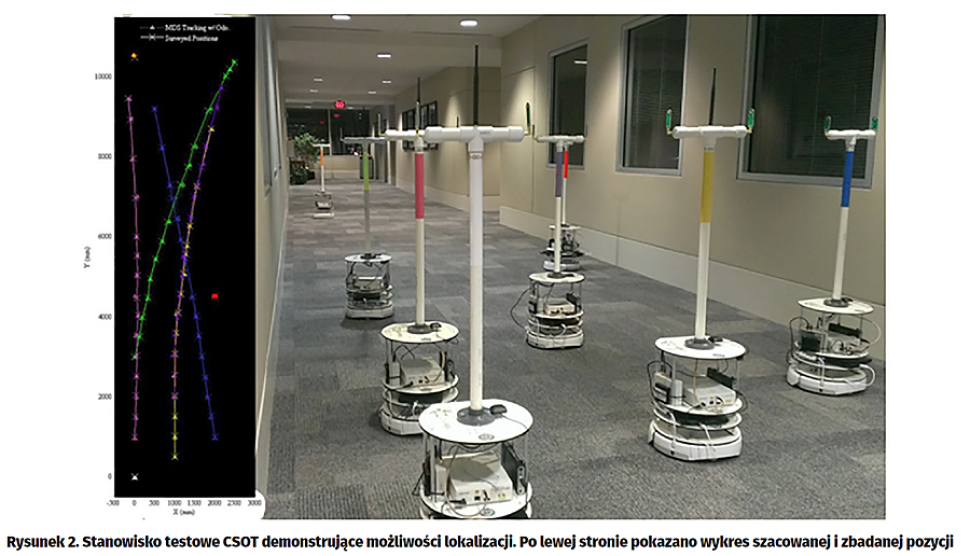
Podczas demonstracji możliwości stanowiska testowego (rysunek 2) radio kognitywne pobrało lokalizację każdego węzła z imponującą dokładnością. W trakcie tego eksperymentu zebrano dane zakresu UWB oraz enkoderów kół z mobilnych węzłów, gdy te poruszały się wzdłuż korytarza. Użycie opracowanego na etapie prototypowania algorytmu pozwoliło obliczyć położenie w zależności od czasu i wysłać te dane do głównego serwera[2]. Po lewej stronie rysunku 1 zauważyć można, że szacowane pozycje węzłów są wykreślane równocześnie z lokalizacjami ustalonymi na podstawie danych z czujników, by sprawdzić poprawność działania modelu. Szacowane wartości miały średnią wielkość błędu na poziomie mniejszym niż 2 cm.
Krótsze programowanie, dłuższe testowanie
Mapowanie kontekstu przestrzennego do informacji widmowej jest istotnym i ekscytującym zagadnieniem badawczym w dziedzinie rozwoju technologii radia kognitywnego (rysunek 3). Poprzez użycie: LabVIEW do uproszczenia łączności pomiędzy urządzeniami, projektu kontrolera, zarządzania modelem klient/serwer oraz prac nad rozwojem algorytmu, można było zredukować czas potrzebny na programowanie i przeznaczyć go na testy. Dzięki integracji sprzętowo-programowej platformy NI możliwe było wdrożenie nowych pomysłów i przyspieszenie odkryć w obszarze radia kognitywnego.
Brian Beck
Instytut Georgia Tech Research
brian.beck@gtri.gatech.edu
Referencje:
1. R. Baxley, B. Beck, J. Kim oraz B. Walkenhorst, „RadioBOT: A Spatial Cognitive Radio Testbed” (zaprezentowane na IEEE Aerospace Conference, 2013).
2. R. Baxley and B. Beck, „Anchor-Free Node Tracking Using Ranges, Odometry, and Multidimensional Scaling” (zaprezentowane na IEEE International Conference Acoustics, Speech, and Signal Processing, 2014).
3. R. Baxley, B. Beck oraz J. Kim, „Real-Time, Anchor-Free Node Tracking Using Ultra-Wideband Range and Odometry Data” (zaprezentowane na IEEE International Conference on Ultra-Wideband, 2014).