Zaloguj
Zaloguj



Elektryka i mechanika
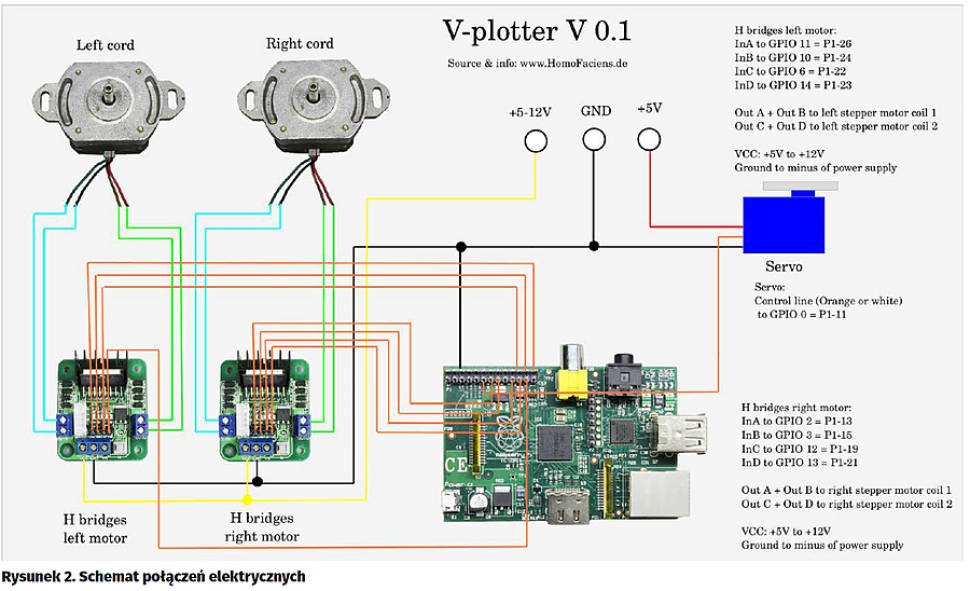
Od strony elektrycznej, V plotter składa się z jednego Raspberry PI, dwóch silników krokowych oraz sterujących nimi dwóch podwójnych modułów z mostkiem H, a także z dodatkowego, małego serwonapędu, sterowanego bezpośrednio z GPIO komputerka. Sposób wykonania połączeń elektrycznych został przedstawiony na rysunku 2.
Kluczowe było użycie odpowiednio małego serwonapędu, by nie uczynić głowicy zbyt ciężką. Ważne jest też by sensownie poprowadzić przewody, tak by nie plątały się. Użycie płytki akrylowej pozwala też stabilniej trzymać pisak względem kartki. Dzięki niej pisak nie obraca się w żadnej płaszczyźnie, ani nie buja – tarcie kartki o płytkę szybko tłumi taki ruch.
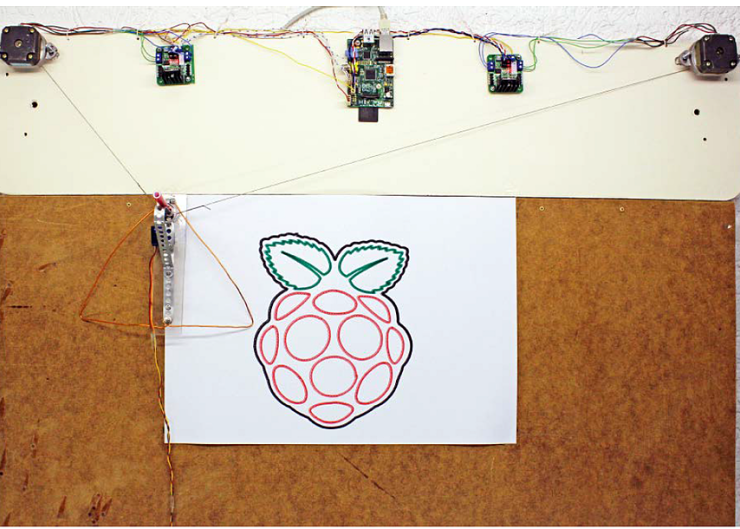
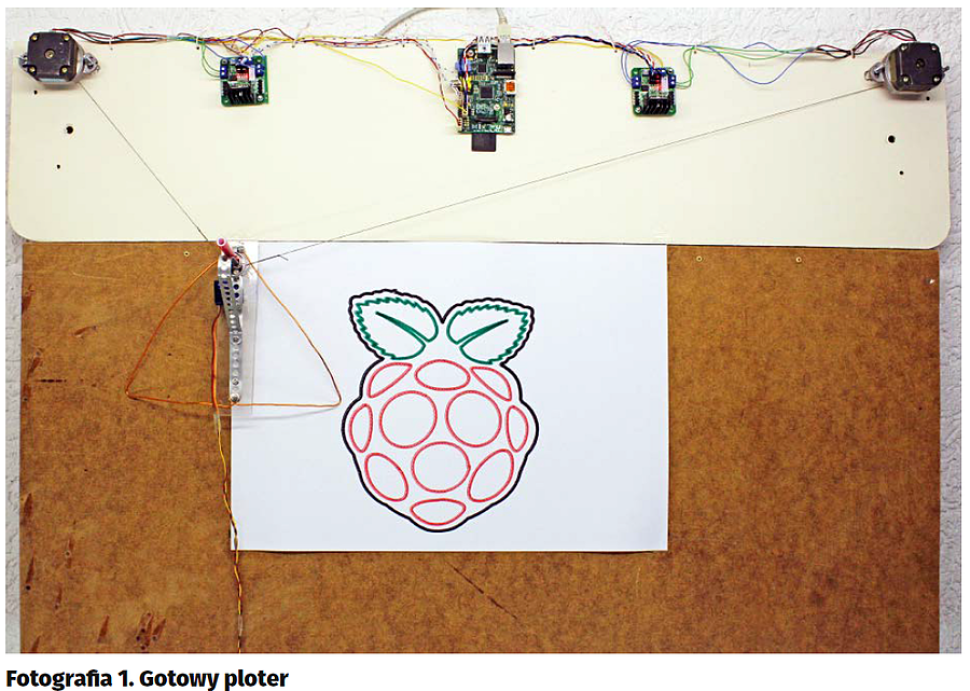
Sam komputer jest umieszczony w górnej części plotera i przymocowany do tablicy, mniej więcej na wysokości silników krokowych. Moduły mostków umieszczone są pomiędzy Raspberry PI a silnikami. Nawijanie i rozwijanie linek za pomocą silników powoduje ruch głowicy względem kartki. Wykorzystywana jest przy tym grawitacja – Równomierne i równoczesne rozwijanie linek powoduje opuszczanie głowicy pionowo w dół, a ich nawijanie – ruch do góry. Jeśli rozwijana jest tylko jedna linka, głowica opuszcza się po łuku okręgu o promieniu równym aktualnej długości drugiej linki i środki w punkcie drugiej osi. Oczywiście, osie kół na które nawijane są linki muszą znajdować się na skrajach kartki, gdyż ograniczają obszar wydruku od lewej i prawej.
Matematyka
Obliczenie tego, jak przekłada się pozycja silników na pozycję pisaka wymaga zastosowania wielu obliczeń matematycznych. Po pierwsze, należy obliczyć, jak przekłada się długość rozwiniętych linek na pozycję względem kartki. Sumaryczna długość rozwiniętych linek nie może być mniejsza od odległości pomiędzy osiami kół, na których linki są nawijane. Jeśli długości rozwiniętych linek są sobie równe, głowica jest umieszczona po środku, pomiędzy osiami, a pozycja w pionie zależy od sumarycznej długości rozwiniętych linek.
Budując samodzielnie ploter tego typu trzeba dokładnie określić odległość pomiędzy serwonapędami (a dokładniej, pomiędzy punktami, z których wyprowadzone są linki – warto je precyzyjnie ustalić, np. poprzez użycie dodatkowych, małych, metalowych oczek). Autor stworzył oprogramowanie w taki sposób, że po zamontowaniu plotera ustala się punkt startowy głowicy, będący lewym, górnym rogiem zadrukowywanej kartki. Współrzędne tego punktu, wyrażone w milimetrach, wraz z odległością pomiędzy punktami wyprowadzeń linek, należy podać jako parametry programu. Konieczne jest też sprawdzenie, jak przy zastosowanych kołach zębatych i silnikach krokowych, jeden krok przekłada się na ruch głowicy. W tym celu użytkownik musi najpierw zmierzyć odległość w linii prostej głowicy w pozycji startowej od punktu wyprowadzenia jednego z silników, a następnie wykonać nim 2000 kroków. Gdy głowica osiągnie nową pozycję, następuje kolejny pomiar jej odległości od punktu wyprowadzenia linki tego silnika. Różnica w pomiędzy odległością końcową a początkowo to długość, na jaką wysuwana jest linka po 2000 krokach. Program wymaga podania ile kroków przypada na wysunięcie linki o 1 mm. Można jeszcze zastanowić się nad zależnością szybkości rozwijania linki od jej aktualnego stopnia nawinięcia – w końcu im warstwa linki na łożysku jest grubsza, tym efektywna średnica szpuli większa, a więc każdy obrót koła powoduje szybsze rozwijanie linki. W praktyce jednak, przy zastosowanych łożyskach, których zewnętrzna średnica to 30 mm, 140-centymetrowa linka nie powoduje znaczącego zwiększenia grubości szpuli nawet przy pełnym nawinięciu i można ten problem pominąć.
Inaczej mówiąc, ploter powinien otrzymywać dokładnie obliczane pozycje punktów na rysowanych liniach, a nie tylko początek i koniec linii. Dzięki temu, tor poruszania się głowicy będzie dokładnie taki, jak potrzeba, a jednocześnie sam ruch i tak będzie płynny, gdyż szybkość sterowania silnikami krokowymi z użyciem Raspberry PI jest wystarczająco duża.

Zastosowane silniki krokowe to japońskie modele KP4M2-217 firmy Tandon (fotografia 3). Pobierają prąd zależny od podłączonego napięcia. Przy 12 V przepływa przez nie 340 mA, co przekłada się na ok. 4 W mocy, a przy 5 V prąd spada do 150 mA, a więc pobierana moc spada do ok. 0,75 W. Użyte moduły z mostkami bazują na układach L298N (fotografia 4), a więc scalonych, dwukanałowych sterownikach silników. Ich maksymalny prąd ciągły to 2 A, ale autor twierdzi, że mocno się nagrzewają już przy 1 A.
W efekcie potrzebne jest jedno źródło napięcia do mostków (5…12 V) i jedno 5-voltowe do zasilania Raspberry PI oraz serwonapędu umieszczonego na głowicy. Masa jest wspólna dla wszystkich elementów.

Autor napisał program w języku C i udostępnił jego kod źródłowy. Program korzysta z biblioteki wiringPi, którą można także bezpłatnie pobrać z Internetu i zainstalować. Najlepiej zrobić to z użyciem polecenia git, które w razie potrzeby też trzeba doinstalować. W Raspbianie służą do tego komendy:
sudo apt-get update
sudo apt-get install git-core
Pobranie i instalowanie wiringPi poleceniem git odbywa się następująco:
git clone git://git.drogon.net/wiringPi
cd wiringPi
git pull origin
./build
Pobrany kod źródłowy można skompilować za pomocą komendy gcc:
gcc v-plotter.c –o v-plotter -I/usr/local/include -L/usr/local/lib -lwiringPi –lm
a później by go uruchomić, wystarczy wpisać:
./v-plotter
Fragmenty kodu źródłowego wraz z komentarzami pokazano na listingu 1.
Program pozwala na wczytywanie plików SVG, przy czym rysuje jedynie kontury, a nie wypełnienia. Ponadto, wszystkie obiekty muszą być przekonwertowane na wielokąty.
Podsumowanie i ocena projektu
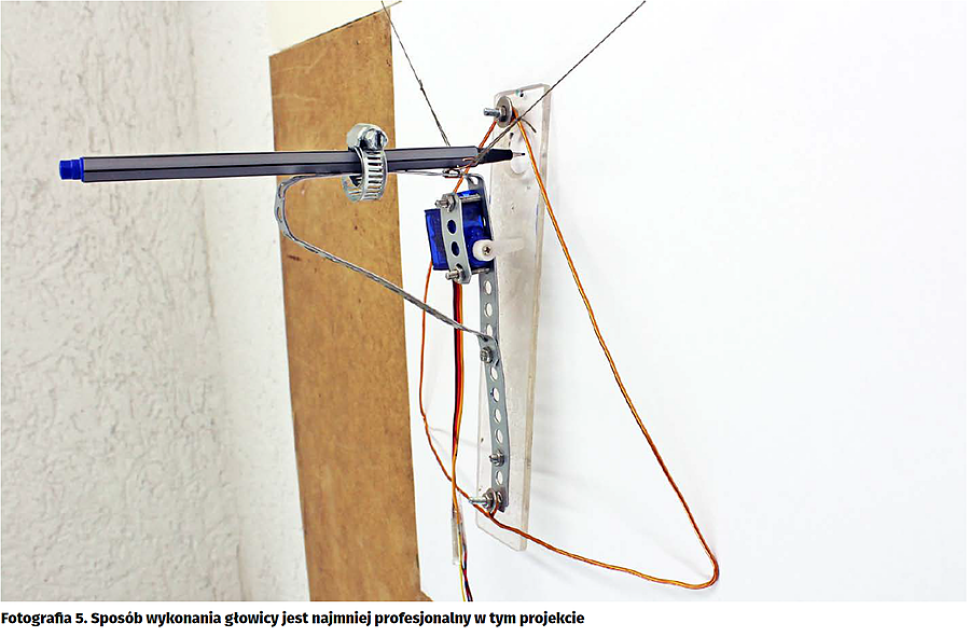
Warto też zwrócić uwagę na staranność wykonania projektu. Autor, dzięki dużemu doświadczeniu wiedział, co będzie istotne w tego typu konstrukcji. Zastosował łożyska, przekładnie, a linki utrzymujące głowicę wyprowadził z użyciem dodatkowych, miniaturowych przelotek. W programie uwzględniono także fakt rozciągania się linek. Zjawisko to ma różne nasilenie, w zależności od rodzaju użytych linek oraz od pozycji głowicy. Im jest ona wyżej, tym naprężenie linek silniejsze. Niestety, głowicę plotera wykonano „jako tako” – jej wygląd prezentuje fotografia 5. Być może autor chciał jak najszybciej zobaczyć efekt swojej pracy, bo tak naprawdę najważniejszym elementem plotera jest układ napędowy i jego oprogramowanie – głowica jedynie trzyma pisak.
Co ciekawe, rzadkością jest też użycie języka C, który w projektach dla Raspberry PI pojawia się rzadko. Autor jednak wykorzystał swoje doświadczenie w tym języku, wynikające z wykonania wielu projektów na Arduino. Sam projekt może też stanowić podstawę do realizacji innych urządzeń, w których pozycja jakiegoś elementu jest zależna od ustawienia silników krokowych.
Marcin Karbowniczek, EP
Dodatkowe informacje:
Opis całego projektu można znaleźć pod adresem http://goo.gl/BmiFyT, kod źródłowy programu dostępny jest na stronie http://goo.gl/GAQgyJ, a dodatkowo autor opublikował film na YouTube, gdzie przedstawia działanie i budowę plotera – można go obejrzeć pod adresem: https://goo.gl/iRHqom.