Zaloguj
Zaloguj



- Obsługa jednego, dwóch lub trzech wejść, każde o innym priorytecie wyboru
- Przystosowanie do napięcia stałego 12 V, 24 V, 36 V lub 48 V
- Minimalna wartość napięcia: 50% napięcia nominalnego lub 9 V (opis w tekście)
- Maksymalna wartość napięcia: 200% napięcia nominalnego lub 55 V (opis w tekście)
- Maksymalny prąd: 16 A
- Rozdzielczość pomiaru napięcia: 0,1 V
- Wyświetlacz: LCD 4×16
- Sygnalizacja pracującego wejścia za pomocą kolorowych LED oraz przez komunikat na wyświetlaczu
- Wbudowana przetwornica step-down dla układu pomiarowego
- Podejmowanie decyzji o przełączeniu: okresowo, co 100…1000 ms, regulowane
- Czas martwy między wyłączeniem jednego wejścia i załączeniem drugiego 0,4 ms
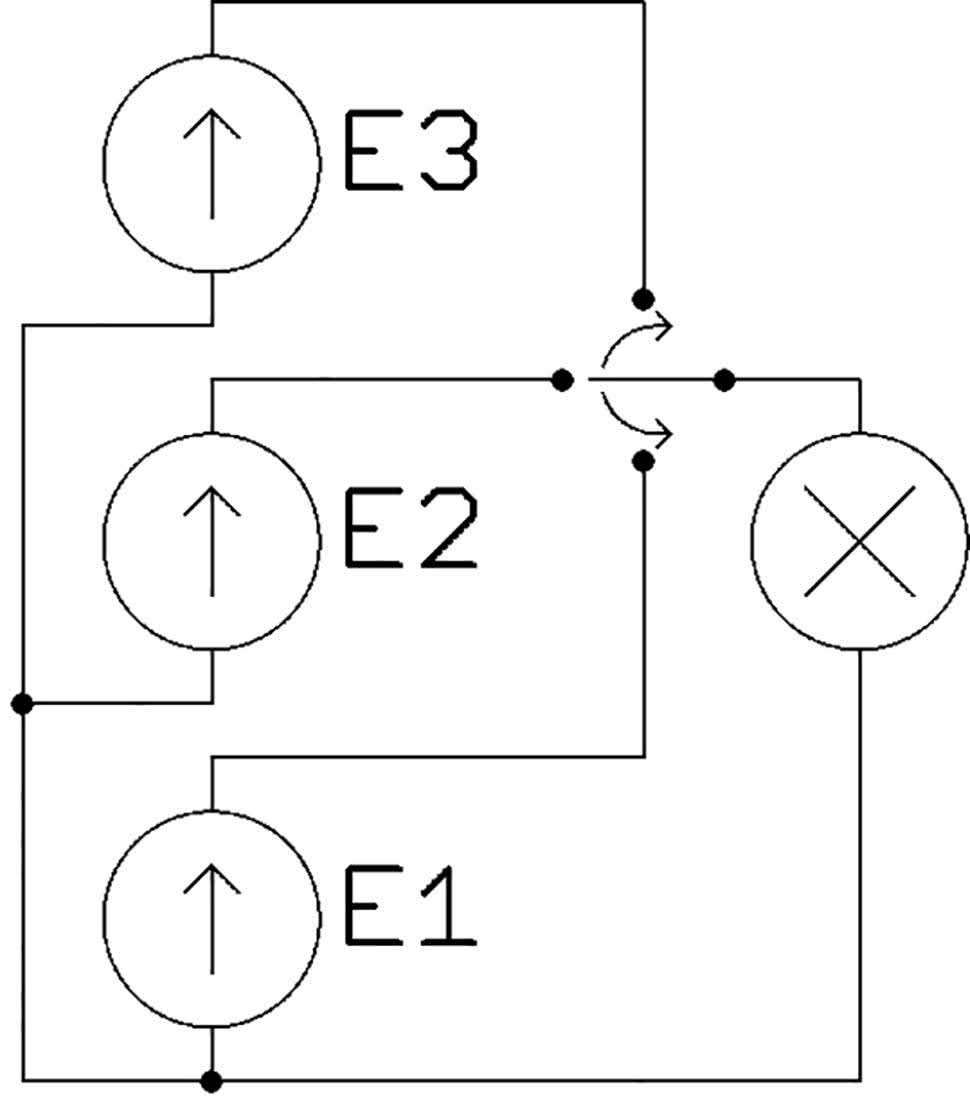
Idea projektu polega na przełączaniu jednego wyjścia pomiędzy trzema wejściami o różnych priorytetach. Przykładowo, najwyższy priorytet może mieć turbina wiatrowa, nieco niższy moduł fotowoltaiczny, zaś najniższy awaryjne źródło zasilania, np. akumulator lub zasilacz sieciowy. Przełączanie następuje na podstawie pomiaru napięcia panującego na każdym z wejść oraz porównania ich z zachowaniem pewnej histerezy. Napięcie na każdym aktywnym wejściu jest na bieżąco wyświetlane, tak samo, jak aktywne wejście. Masy wszystkich wejść są połączone, a przełącza się bieguny dodatnie. Zilustrowano to na rysunku 1.
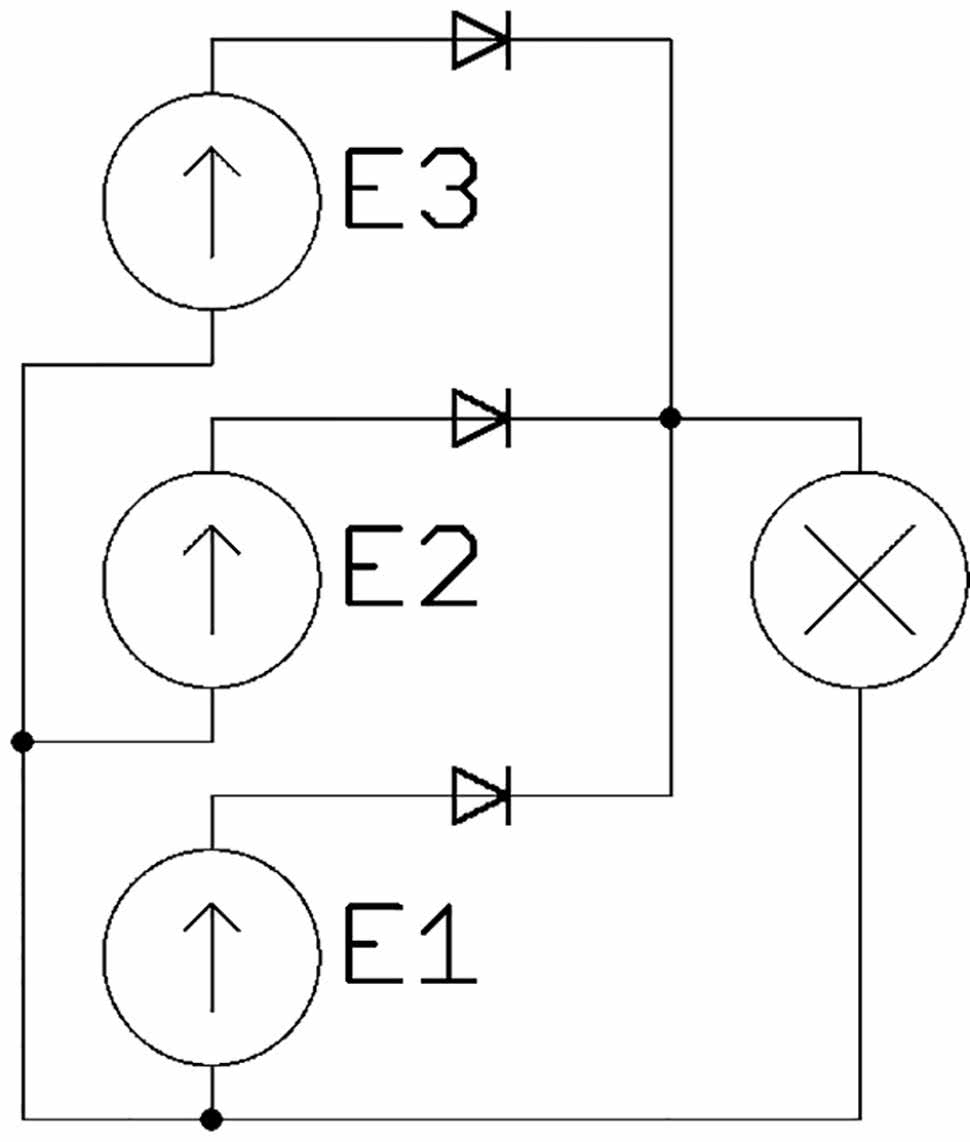
Można zapytać – w czym ten układ jest lepszy od zwykłego przełącznika zbudowanego z użyciem 3 diod, takiego jak pokazano na rysunku 2? Wydawać by się mogło, że jest zdecydowanie łatwiejszy do zbudowania, pewniejszy w działaniu oraz tańszy. Źródło o najwyższym napięciu wyjściowym otwiera przynależną mu diodę szeregową polaryzując pozostałe w kierunku zaporowym i już. Jednak odpowiedź nie nastręcza trudności. Po pierwsze, układ diodowy nie ma możliwości ustalenia priorytetów wejść. Przykładowo, do jednego z wejść zostanie dołączony akumulator, pełniący rolę zasilacza rezerwowego, a napięcia na pozostałych dwóch wejściach (np. z modułu fotowoltaicznego i turbiny wiatrowej) będą tylko nieznacznie niższe od tego, które ma akumulator. Wówczas odbiornik zostanie zasilony z akumulatora, powodując jego niepotrzebne rozładowywanie. Drugim powodem jest brak kontroli nad wartością napięcia. Jeżeli zasilany odbiornik może działać nieprawidłowo po podłączeniu go do zbyt niskiego napięcia, wówczas lepiej jest po prostu go wyłączyć. Prezentowany układ taką funkcję ma, o czym dalej. Kolejnym uzasadnieniem jest wygodna prezentacja aktualnych napięć występujących na wejściach oraz czytelna informacja o tym, które wejście jest aktywne. Pozwala to na szybką ocenę jakości pracy naszego systemu zasilania. W układzie diodowym wiązałoby się to z koniecznością dodania zewnętrznego modułu pomiarowego.
Budowa i zasada działania
Schemat ideowy układu monitora znajduje się na rysunku 3. Z racji stopnia rozbudowania, zostanie omówiona zasada funkcjonowania poszczególnych jego bloków.
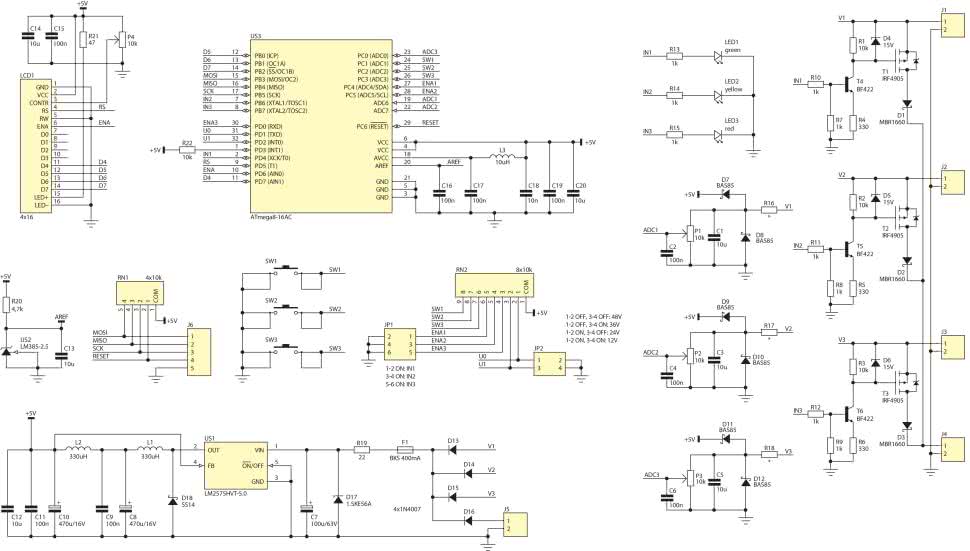
Selektor wejść składa się z trzech identycznych obwodów, które obsługują każde wejście oddzielnie. Elementem wykonawczym jest tranzystor MOSFET z kanałem P, co umożliwia przełączanie dodatnich zacisków zasilających. Istotna jest tutaj możliwie niska rezystancja otwartego kanału – w IRF4905 jest ona na poziomie 20 mΩ. Powoduje to, że moc wydzielona na tym tranzystorze przy prądzie 16 A nie przekroczy 5 W. Załączenie tranzystora odbywa się poprzez dołączenie bramki do potencjału niskiego, zatem musi mieć również niewielkie napięcie progowe.
Wstawione w szereg z drenem diody dużej mocy mają za zadanie odciąć drogę powrotną dla prądu, która tworzy się przez diody wbudowane w tranzystory MOSFET. Bez nich, prąd może przepływać przez wyłączony tranzystor od wyjścia w kierunku wejścia. Dioda Zenera o napięciu przebicia 15 V chroni bramkę przed uszkodzeniem w wyniku przekroczenia maksymalnego napięcia bramka źródło (±20 V). Opornik o rezystancji 10 kΩ rozładowuje bramkę po wyłączeniu tranzystora oraz umożliwia przepływ prądu kolektora tranzystora sterującego. Stała czasowa: τ = 10 kΩ×3,4 nF = 34 μs. Rozładowanie następuje w przeciągu ok. 2,2×τ, czyli 75 μs. Nie uwzględnia to pojemności diody Zenera, czasu wychodzenia z nasycenia przez tranzystor sterujący i zatykania diody szeregowej. Dlatego przyjęto 400 μs przerwy, aby mieć pewność, że dane wejście zostanie odcięte przez podłączeniem innego. Zasilany obwód musi być odporny na tego typu zaniki.
Tranzystor sterujący pracuje w nieczęsto spotykanej dla driverów konfiguracji, ponieważ jest źródłem prądowym. Można je wyłączyć (sytuacja A) po zwarciu lewego wyprowadzenia rezystora 1 kΩ do potencjału zbliżonego do 0 V.
Po podaniu napięcia 5 V przez mikrokontroler, jego baza jest podciągana do potencjału 2,5 V. To powoduje otwarcie złącza baza-emiter, a na emiterze ustala się potencjał ok. 1,8 V względem masy. Wywołuje to przepływ prądu o natężeniu ok. 5,5 mA przez rezystor emiterowy. Maksymalnie o takiej wartości prąd (z dokładnością do pomijalnie małego prądu bazy) jest przewodzony przez kolektor, przez co potencjał bramki tranzystora MOSFET obniża się. Objaśnienie znajduje się na rysunku 4.
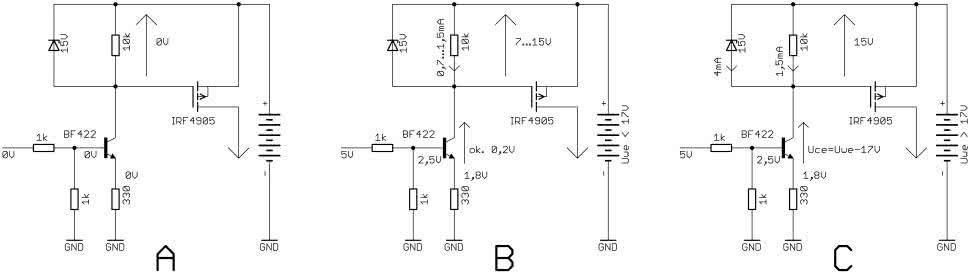
Sytuacja B: przy małym napięciu podawanym na wejście (do ok. 17 V), tranzystor NPN nasyca się, ponieważ dioda Zenera pozostaje zatkana i przez kolektor może płynąć tylko niewielki prąd, wynikający z obecności rezystora 10 kΩ. Gdy napięcie podniesie się (sytuacja C), dioda Zenera zacznie przewodzić i popłynie przez nią prąd o natężeniu ok. 4 mA, a pozostała część przez wspomniany już rezystor. Tranzystor wejdzie w stan aktywny i nadmiar napięcia będzie odkładał się na nim.
Parametry układu pozostaną niezmienne w szerokim zakresie napięcia wejściowego: wartość maksymalna wynosi ok. 150 V i jest ograniczona przez straty w BF422. Nawet skoki napięcia o dużej amplitudzie nie będą w stanie go uszkodzić: dopuszczalne UCE to 250 V. Wytrzymałość napięciowa układu jest ograniczona, w praktyce, maksymalnym napięciem dren-źródło tranzystorów polowych.
Warto zwrócić uwagę, że załączenie danego wejścia jest równoznaczne z zaświeceniem się przypisanej mu diody LED1-LED3. Ich kolory zostały dobrane według priorytetów wejść: zielony najwyższy, żółty średni i czerwony najniższy.
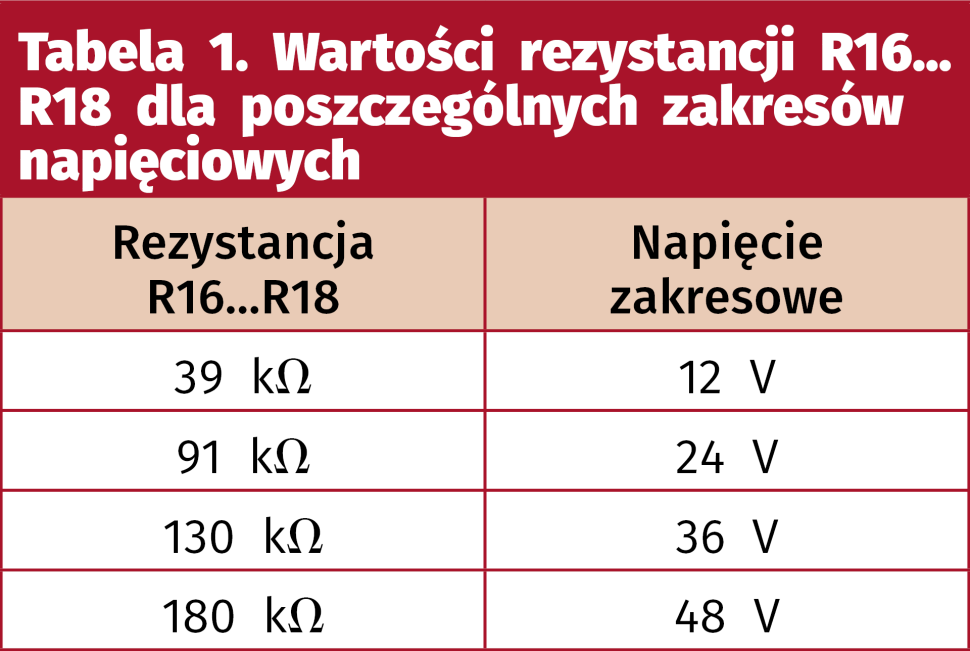
Pomiar napięcia na każdym z wejść jest mierzony za pośrednictwem dzielnika rezystancyjnego, który dopasowuje jego wartość do takiej, którą zaakceptuje przetwornik A/C w mikrokontrolerze. Żądane napięcie odkłada się na części suwaka potencjometru, a pozostała (znacząca) jego część na rezystorze szeregowym. Przyjęto, że należy wlutować rezystory R16…R18 o rezystancjach odpowiednich dla danego zakresu. Wszystkie one powinny mieć jednakową wartość. Aby regulacja potencjometrami P1…P3 działała efektywnie, dla rezystancji nominalnych ślizgacze powinny znajdować się w położeniu środkowym. Oznacza to, że przy maksymalnym mierzonym napięciu (dwukrotność zakresowego), przez ten obwód ma płynąć prąd 0,5 mA. Wyniki wyliczeń (zaokrąglone do szeregu E24) podaje tabela 1. Rezystory te mogą mieć tolerancję 5%, ponieważ kalibracja zniweluje ten błąd.
Kondensatory ceramiczne znajdujące się w otoczeniu każdego potencjometru mają za zadanie odfiltrować zaburzenia, które mogą przenosić się na wejście. Niestety, wprowadzają one pewną zwłokę: łatwo oszacować, że stała czasowa takiego układu RC to ok. 100 ms. Z tego względu, kontrola napięcia na wejściach odbywa się nie częściej, niż co 100 ms.
Diody Schottky chronią wrażliwe wejścia przetwornika A/C przed uszkodzeniem wywołanym napięciem o zbyt dużej wartości lub przeciwnej polaryzacji. Przy ustawieniu suwaka w połowie ślizgacza potencjometru, dioda dołączona do +5 V zaczyna się otwierać przy napięciu niewiele wyższym niż referencyjne, które wynosi 2,5 V. Jednocześnie, rezystory szeregowe ograniczają prąd płynący przez te diody.
Mikrokontroler
Mikrokontroler, który zarządza pracą całego systemu, to ATmega8 w obudowie TQFP32. Jego 10-bitowy przetwornik A/C doskonale wpasowuje się w potrzeby tego układu. Napięcia referencyjnego 2,5 V dostarcza mu zewnętrzny układ typu LM385-2.5. Do wyprowadzeń mikrokontrolera został dołączony również wyświetlacz LCD o organizacji 4 wiersze po 16 znaków. Pamięć w większości takich wyświetlaczy jest tak zorganizowana, że wiersze nieparzyste to jedna linia, a parzyste – druga. Od strony bibliotek go obsługujących jest widoczny jakby miał 2 wiersze po 32 znaki. Potencjometr P4 służy do regulacji kontrastu LCD.
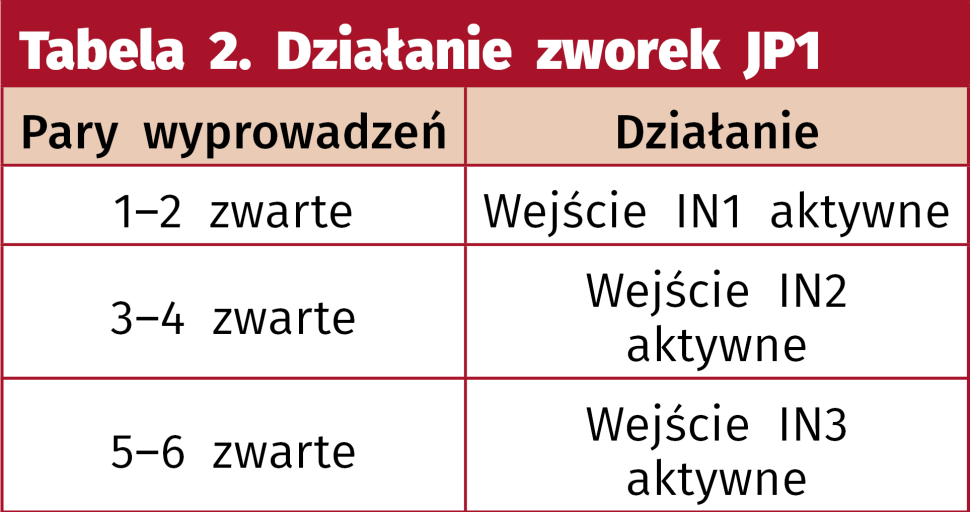
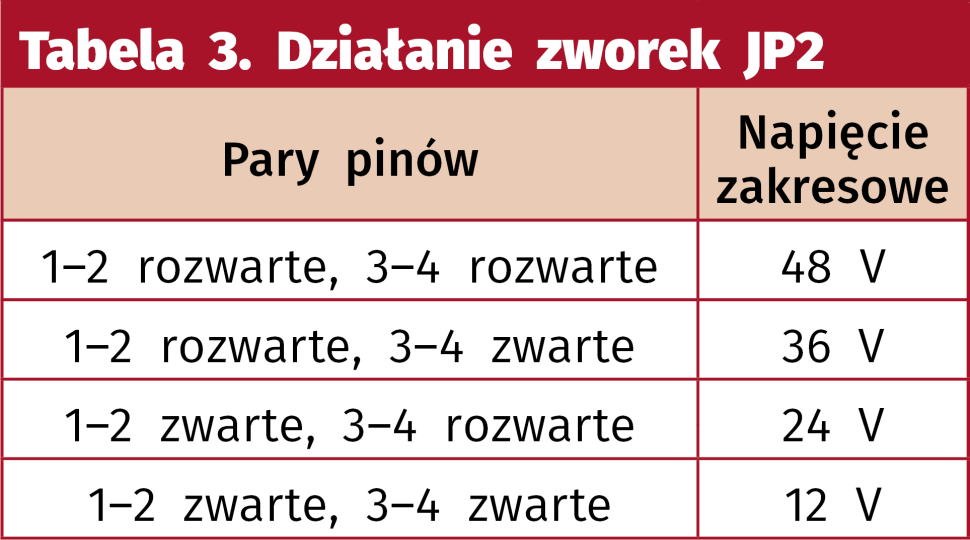
Aby konfiguracja układu pod kątem aktywacji poszczególnych wejść i zawiadomienia o napięciu zakresowym była nieskomplikowana i czytelna, na płytce zamontowano dwa zespoły zworek: JP1 i JP2. Ich działanie opisują tabela 2 i tabela 3.
Aktywowanie danego wejścia polega na tym, że napięcie na nim występujące będzie wyświetlane na ekranie urządzenia. Ponadto, wejścia nieaktywne nie są brane pod uwagę, jeżeli chodzi o dokonywanie wyboru przy dołączaniu wyjścia.
Zasilacz urządzenia wykonano w oparciu o stabilizator impulsowy typu LM2575-5.0 w typowej aplikacji. Na jego wyjściu znajduje się filtr z cewką L2. Dołączenie wejścia pętli sprzężenia zwrotnego za tą cewką powoduje kompensację spadku napięcia na rezystancji jej uzwojenia. Prąd dla stabilizatora impulsowego jest „podkradany” przez diody D13…D16 z wejścia, które ma aktualnie najwyższe napięcie względem masy. Działa to w analogiczny sposób, jak opisany wcześniej diodowy selektor napięć. Na płytce znajduje się złącze J5, służące do dołączenia zewnętrznego zasilacza o napięciu min. 8 V. Jego zastosowanie może być przydatne w sytuacji, gdy napięcia na wejściach mogą spadać poniżej tej wartości, a zależy nam na tym, by zachować podgląd na napięcia. W prototypie użyto stabilizatora HVT – oznacza to, że akceptuje napięcie wejściowe do 60 V. Jest on jednak droższy od swojej podstawowej wersji, która działa z napięciem nieprzekraczającym 40 V. Warto dostosować do niego również transil zabezpieczający: zamiast 1.5KE56A (56 V) wlutować np. 1.5KE39A (39 V). Tańszą wersję można zastosować również wtedy, kiedy wymontuje się diody D13…D15, a cały układ zasili z zewnętrznego zasilacza, poprzez złącze J5. Wtedy obwód zasilania jest całkowicie niezależny od tego, co dzieje się na wejściach IN1…IN3.
Rolą rezystora R19 jest ograniczanie prądu płynącego przez transil w momencie, kiedy ulegnie on chwilowemu otwarciu dostatecznie wysokim napięciem. Jeśli płynąłby przez niego zbyt duży prąd, co oznaczałoby znaczne przekroczenie napięcia lub zwarcie w sekcji zasilania, przepaleniu ulegnie bezpiecznik F1. Ma to na celu ochronę układu przed dalszymi zniszczeniami lub nawet wywołaniem pożaru przez rozgrzane podzespoły.
Montaż
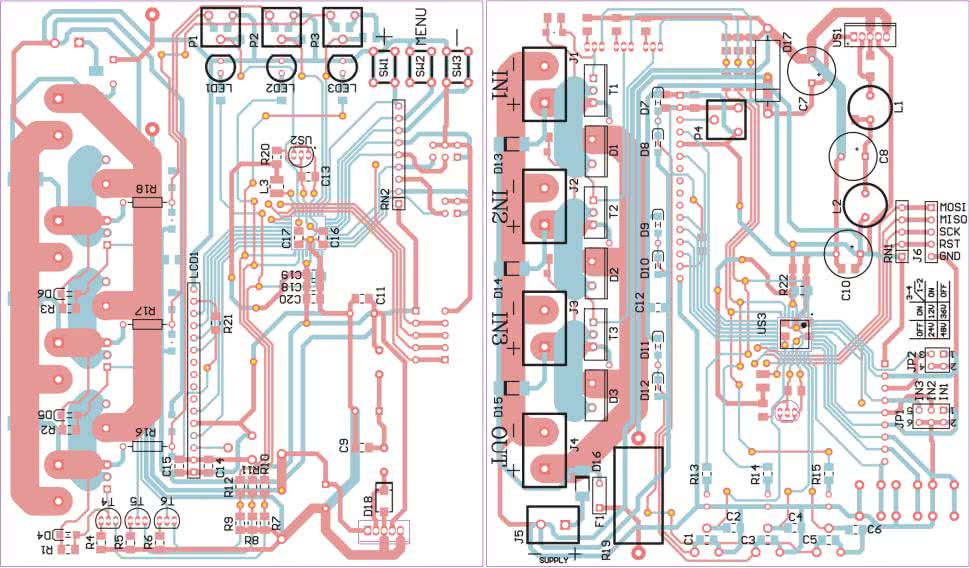
Układ monitora został zmontowany na dwustronnej płytce drukowanej o wymiarach 118 mm×100 mm. Jej schemat montażowy pokazano na rysunku 5. Płytka zawiera zarówno elementy przewlekane, jak i montowane powierzchniowo. Zalecana kolejność montażu to: elementy RLC SMD i diody SMD, mikrokontroler ATMega8, elementy przewlekane na warstwie górnej (potencjometry P1…P3, drabinka RN2, tranzystory T4…T6, układ US2, złącze goldpin do LCD, rezystory R16…R18), zaczynając od najniższych, bez diod LED1…LED3 i przycisków SW1…SW3, elementy przewlekane na warstwie spodniej, zaczynając od najniższych, na samym końcu, przyciski SW1…SW3 oraz diody świecące LED1…LED3.
Rezystor R19 oraz transil D17 zaleca się montować kilka milimetrów nad powierzchnią płytki, aby obieg powietrza wokół nich był swobodny. Diody D1…D3 oraz tranzystory T1…T3 znajdują się w jednej linii, aby łatwo można było je wszystkie razem przykręcić do wspólnego radiatora za pośrednictwem termoprzewodzących podkładek izolacyjnych. Układ US1 nie wymaga radiatora. Należy pamiętać o zamontowaniu rezystorów R16…R18 odpowiednich dla żądanego zakresu.
Po upewnieniu się, że wszystkie elementy znajdują się na swoich miejscach, można wetknąć wyświetlacz LCD (z wlutowanym złączem goldpin żeńskim) w przeznaczone do tego miejsce oraz przykręcić go. Proponuję również nałożyć zworki na JP1 i JP2, zgodnie z wymaganiami.
Uruchomienie
Pierwszą czynnością uruchomieniową jest dołączenie zasilania (min. 8 V) do któregokolwiek wejścia oraz skontrolowanie napięcia zasilającego mikrokontroler, mierząc je np. na kondensatorze C11. Powinno wynosić 5 V±100 mV. Po wykonaniu tego pomiaru, można przejść do zaprogramowania pamięci Flash mikrokontrolera. Oprócz tego, konieczna będzie modyfikacja bitów zabezpieczających:
- przełączenie źródła zegara na wewnętrzny oscylator RC 8 MHz,
- załączenie funkcji BODEN.
Jeżeli mikrokontroler został prawidłowo skonfigurowany, należy ustawić prawidłowy kontrast na wyświetlaczu za pomocą potencjometru P4. Następnie, odłączyć zasilanie i połączyć równolegle wszystkie te wejścia, których zamierzamy używać. Ponownie włączyć zasilanie, tym razem zważając na to, aby napięcie zasilające mieściło się w tolerowanym przez wybrany zakres (oraz stabilizator) przedziale. Równoległe połączenie wejść służy ułatwieniu kalibracji: wystarczy ustawić jedną, poprawną wartość wskazywaną na jednym wejściu, a potem tę samą na pozostałych. Kalibracji dokonuje się potencjometrami P1…P3. Ostatnią czynnością przygotowującą układ do pracy jest ustawienie parametrów przełączania. Zostanie to opisane w następnym rozdziale.
Eksploatacja
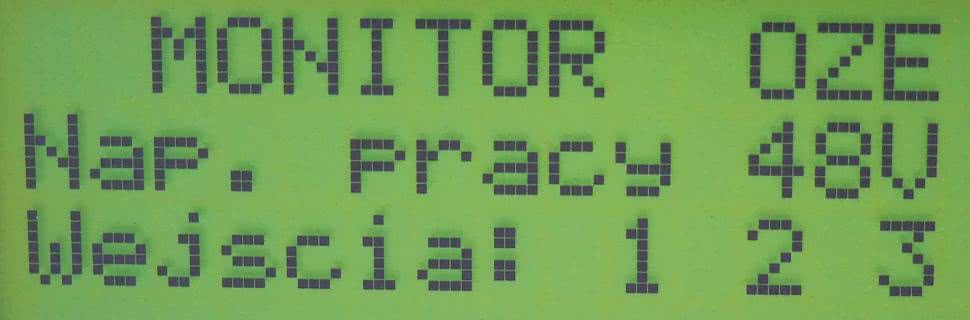
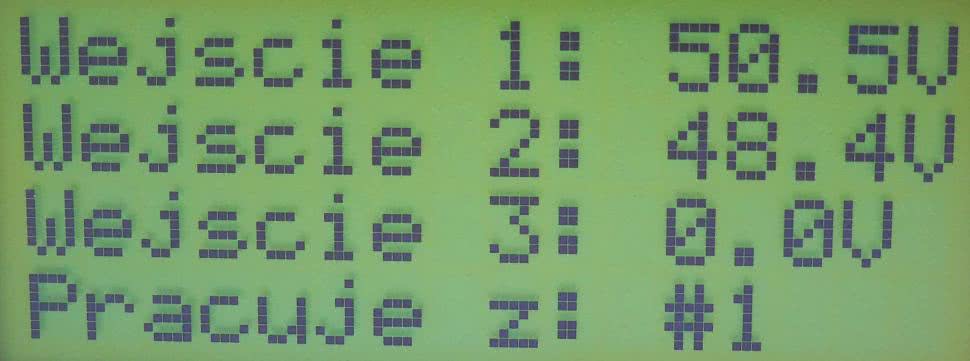
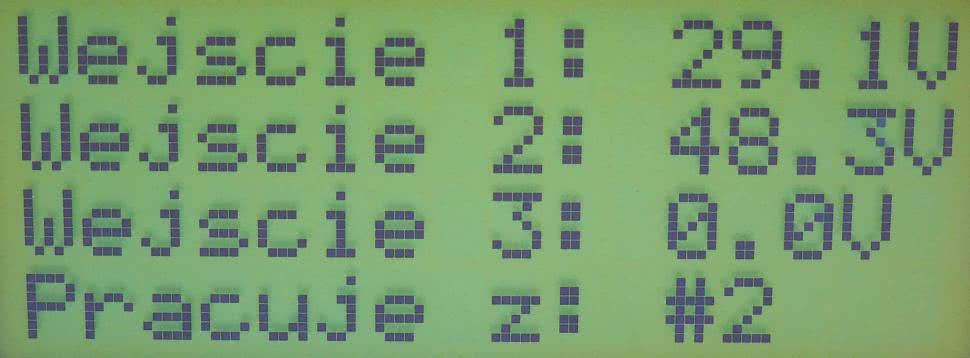
Po włączeniu zasilania, przez 3 sekundy jest wyświetlany ekran powitalny – fotografia 6. Widoczne są na nim nastawy wykonane zworkami, tj. napięcie pracy i wybrane wejścia. W czasie prawidłowej pracy, wyświetlane są aktualne napięcia na wejściach oraz aktualnie załączone wejście, zgodnie z pobranymi z EEPROM ustawieniami. Pokazano to na fotografii 7 oraz fotografii 8. Diody LED1…LED3 również wskazują aktualnie pracujące wejście.
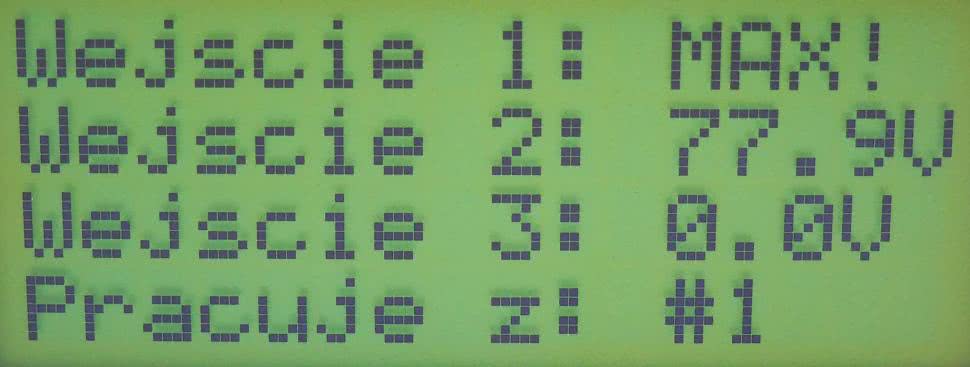
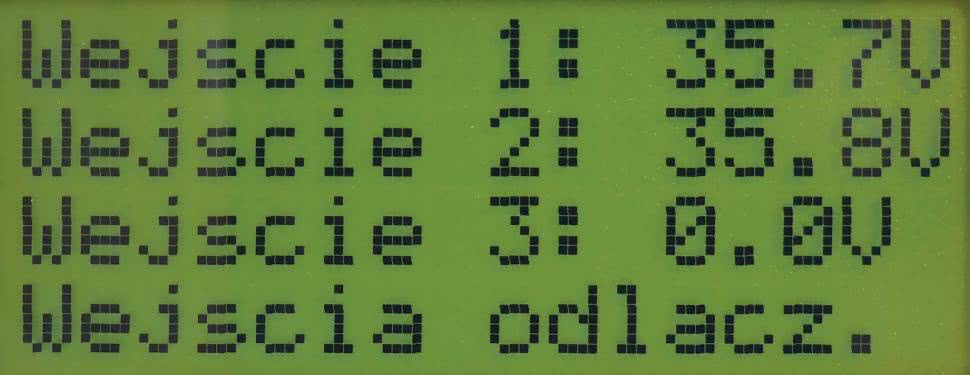
Jeżeli napięcie na którymś wejściu przekracza 200% wartości zakresowej, wówczas jest wyświetlany komunikat „MAX!” zamiast wartości liczbowej – fotografia 9. Pomimo tego, wejście nie jest odłączane od obciążenia. Ma to zapobiec odłączeniu np. turbiny wiatrowej w czasie silnego wiatru. Takie działanie doprowadziłoby do nagłego wzrostu prędkości obrotowej wirnika, co mogłoby się skończyć poważną awarią generatora. Z tego powodu, samo obciążenie musi być przystosowane do napięcia zasilającego zmieniającego się w szerokim zakresie. W sytuacji, kiedy żadne z wejść nie spełnia stawianych mu warunków załączenia (napięcia na nich są zbyt niskie), następuje ich odłączenie od obciążenia – fotografia 10. Układ dalej monitoruje napięcia i załączy zasilanie ponownie, jak tylko którekolwiek z nich wróci do prawidłowego stanu.
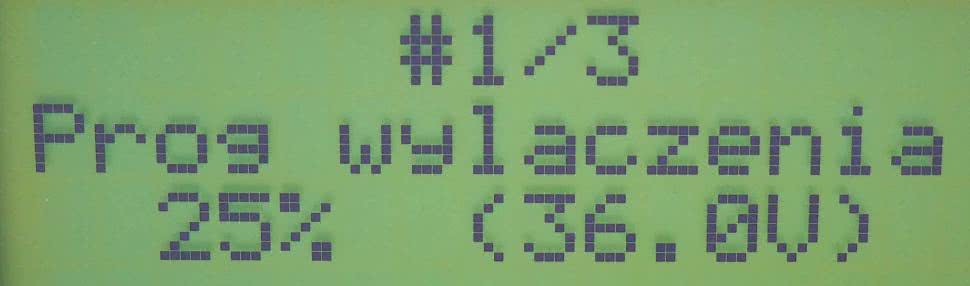
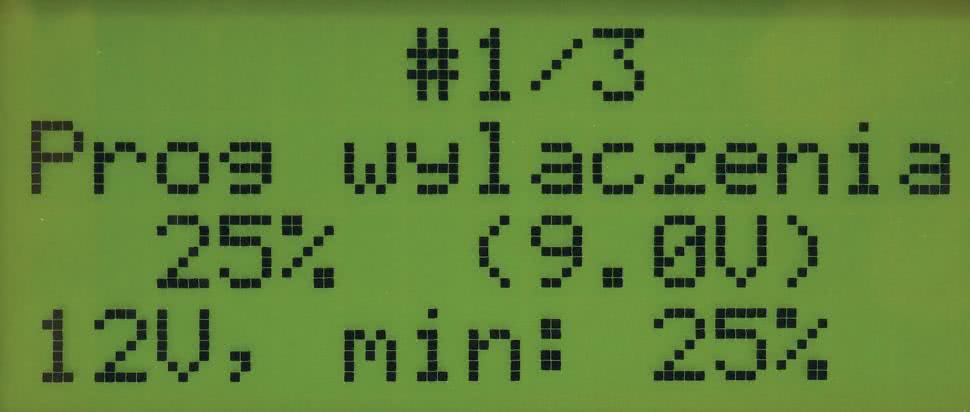
Krótkie przyciśnięcie przycisku SW2 (MENU) uruchamia pierwszą pozycję menu, w której ustawia się napięcie, poniżej którego wejście jest klasyfikowane jako niezdatne do zasilania obciążenia. Ustawiany jest procent napięcia zakresowego, z przedziału 1…50% z rozdzielczością 1%. Dla czytelności, w nawiasie jest podawane to napięcie, przeliczone na wolty – fotografia 11. Przykładowo, dla zakresu 48 V, napięcie wyłączenia może zawierać się w przedziale 24…47,5 V. Jeżeli zostało wybrane napięcie zakresowe 12 V, wówczas istnieje dodatkowe ograniczenie: tranzystory MOSFET mogą być otwarte, jeżeli napięcie wejściowe nie jest mniejsze od 9 V. Powoduje to, że zakres regulacji zawęża się do 25%, o czym informuje komunikat (fotografia 12). Na innych zakresach ten problem nie występuje, ponieważ minimalne napięcie na następnym zakresie (24 V) wynosi 12 V.
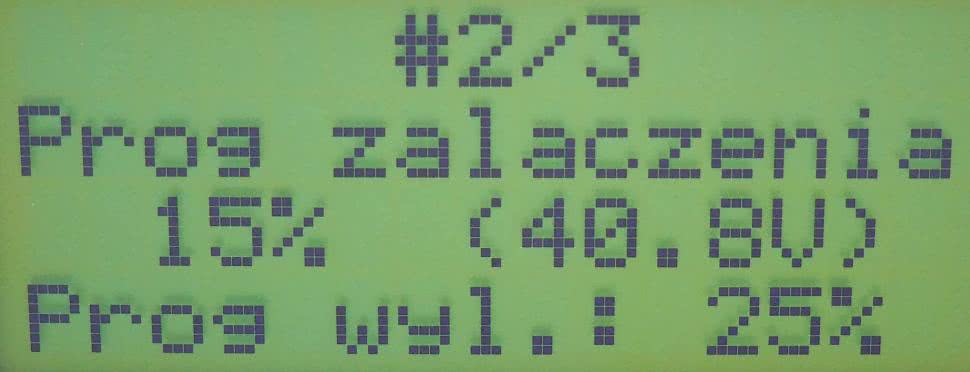
Ponownie wciskając przycisk MENU, przeniesiemy się go ustawienia napięcia załączenia, czyli takiego, którego przekroczenie może spowodować przełączenie wejścia. Naturalnie, jest ono wyższe od napięcia wyłączenia. Różnica między nimi wywołuje histerezę w układzie. Wartość maksymalna jest równa 0% (odpowiada to napięciowi zakresowemu), a minimalna jest o 1% wyższa od ustawionej wcześniej wartości progu wyłączenia. Dzięki temu, zachowane są odpowiednie relacje między tymi wartościami oraz nie ma ryzyka pracy z zerową histerezą. W dolnej linijce wyświetlana jest wartość ustawiona w poprzedniej pozycji menu – fotografia 13.
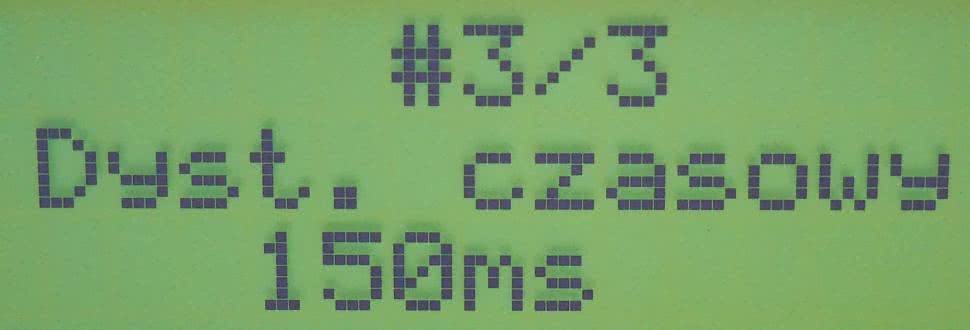
Na ostatniej pozycji menu ustawiany jest odstęp czasowy między kolejnymi pomiarami napięcia oraz, co z tym związane, decyzjami o przełączeniu. Regulacja jest możliwa w zakresie 100…1000 ms z krokiem 10 ms. Z racji dużej liczby kroków, ustawianie odbywa się „w pętli”, tj. poniżej 100 ms pojawia się 1000 ms i odwrotnie, co przyspiesza przechodzenie między wartościami skrajnymi. Widok wyświetlacza jest na fotografii 14. Ponowne wciśnięcie przycisku MENU spowoduje zapis ustawień i powrót do normalnej pracy.
Wyjście z menu następuje samoczynnie po ok. 10 s od ostatniego wciśnięcia przycisku. Wtedy również dokonywany jest zapis wprowadzonych zmian. Podczas regulacji w menu, wszystkie wejścia są odłączane.
Warto w tym miejscu nadmienić, że domyślne ustawienia, które układ stosuje w przypadku błędnych wartości odczytanych z EEPROM, są następujące:
- próg wyłączenia 1%,
- próg załączenia 0%,
- dystans czasowy 100 ms.
W mikrokontrolerze załączony jest detektor Brown-out. Powoduje to wstrzymanie jego pracy (wejście w stan resetu), kiedy napięcie go zasilające jest zbyt niskie. Dzięki temu, chwilowe spadki napięcia poniżej wymaganej przez stabilizator wartości 8 V nie spowodują nieprawidłowości w wykonywaniu programu. Po przywróceniu zasilania do prawidłowej wartości, praca układu zostaje wznowiona.
Michał Kurzela, EP
- R1…R3, R22: 10 kΩ
- R4…R6: 330 Ω
- R7…R15: 1 kΩ
- R16…R18: 39 kΩ/0,25 W (opis w tekście)
- R19: 22 Ω/5 W
- R20: 4,7 kΩ
- R21: 47 Ω
- RN1: 4×10 kΩ
- RN2: 8×10 kΩ
- P1…P4: 10 kΩ (pot. montażowy, leżący)
- C1, C3, C5, C12…C14, C20: 10 μF/10 V (SMD 1206)
- C2, C4, C6, C9, C11, C15…C17, C19: 100 nF (SMD 1206)
- C7: 100 μF/63 V (elektrolit.)
- C8, C10: 470 μF/16 V (elektrolit.)
- C18: 10 nF (SMD 1206)
- D1…D3: MBR1660
- D4…D6: dioda Zenera 15 V (MiniMELF)
- D7…D12: BAS85 (MiniMELF)
- D13…D16: 1N4007 (MELF)
- D17: 1.5KE56A (transil, opis w tekście)
- D18: SS14
- LED1: zielona, matowa, 5 mm
- LED2: żółta, matowa, 5 mm
- LED3: czerwona, matowa, 5 mm
- T1…T3: IRF4905 (opis w tekście)
- T4…T6: BF422
- US1: LM2575HVT-5.0 (TO220-5)
- US2: LM385-2.5 (TO92)
- US3: ATmega8 (TQFP32)
- J1…J4: ARK2/7,5 mm
- J5: ARK2/5 mm
- J6: goldpin 1×5 pin
- JP1: goldpin 2×3 pin
- JP2: goldpin 2×2 pin
- Goldpin 1×16 pin, męski+żeński
- F1: BKS 400 mA
- L1, L2: 330 μH (pionowy)
- L3: 10 μH (SMD 1210)
- LCD1: Wyświetlacz LCD 4×16 (zgodny z HD44780, o organizacji 2×32, opis w tekście)
- SW1…SW3: przycisk 6×6 mm/17 mm
- 4×tuleja dystansowa + śruba z nakrętką do wyświetlacza LCD
- 5 zworek goldpin