Zaloguj
Zaloguj




Buraki nie są jednak kluczowe dla tego projektu. Wybór na nie padł najpewniej ze względu na ich angielską nazwę, która pozwala uzyskać pewną grę słów. Burak po angielsku to "beet", co wymawia się bardzo podobnie do słowa "beat", czyli muzycznego bitu.
I ponieważ beatbox to rytmiczne wydawanie dźwięków przypominających perkusyjne, ale za pomocą ust, gardła i przepony, autor wybrał na swój projekt nazwę BeetBox, tworząc pudełko z burakami, których dotknięcie pozwala na generowanie dźwięków podobnych jak z perkusji. Projekt nie jest trudny i można go łatwo odtworzyć - przygotowując, na przykład, jako żart na zbliżający się Prima Aprilis.
Wygląd
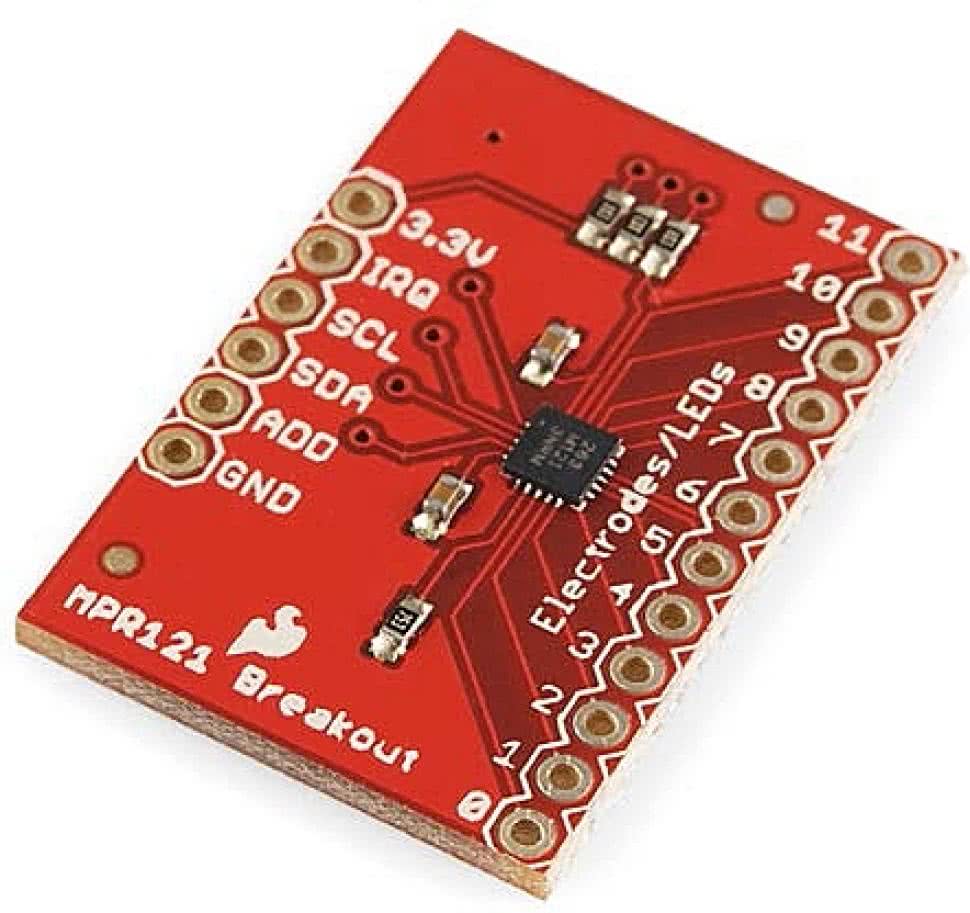
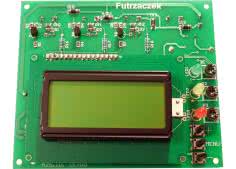
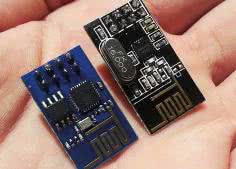
Fotografia 1. Płytka z układem MPR121
BeetBox został zaprojektowany tak, by w żadnym stopniu nie sugerował z góry, że jest to urządzenie elektroniczne. Obudowa składa się z drewna, a poza nią widoczne są jedynie buraki. Dzięki temu całość robi zupełnie niewinne wrażenie, trochę jakby była miała to być jakaś ekskluzywna skrzynka na warzywa.
Zresztą konstrukcja obudowy nie jest tak ważna z punktu widzenia działania projektu - istotne jest tylko, by poszczególne buraki były od siebie odseparowane elektrycznie, co oznacza, że nie mogą się stykać, a stelaż, na którym się znajdują nie może przewodzić prądu.
Z tego względu drewno wydaje się być dobrym wyborem szczególnie, że jest łatwe w obróbce, szerokodostępne oraz naturalne w naszym otoczeniu, dzięki czemu nie budzi podejrzeń, że może zawierać urządzenie elektroniczne.
Autor na potrzeby obudowy wykorzystał deski o grubości ok. 12 mm, które dociął do potrzeb i wykończył za pomocą ręcznych i elektrycznych narzędzi. Konieczne było wykonanie nacięć, otworów i nawierceń. Całość można też pomalować i polakierować, by wyglądała estetyczniej i by zwiększyć trwałość powierzchni. Powycinane deski autor skleił klejem do drewna i zbił gwoźdźmi, następnie uszczelniając wszystko pianką poliuretanową.
|
Budowa elektryczna
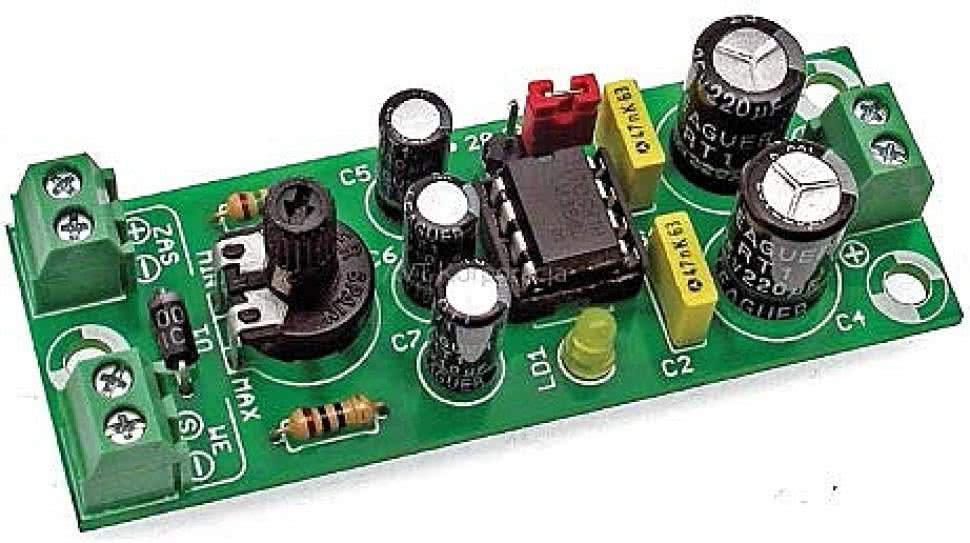
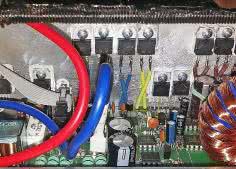
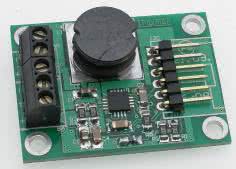
Fotografia 2. Moduł zasilacza z układem LM386
Z punktu widzenia elektroniki, projekt jest bardzo prosty. Serce "urządzenia" stanowi Raspberry PI - autor użył Modelu B+ z 512 MB pamięci RAM. Kluczowy jest też pojemnościowy sensor dotyku - tu autor skorzystał z gotowego modułu firmy Sparkfun, która zainstalowała układ Freescale MPR121 na PCB i wyprowadziła połączenia.
To bardzo wygodne rozwiązanie (pozwalające uniknąć lutowania bardzo małych padów) szczególnie, że sam układ został wycofany z produkcji i wielu dostawców już nie ma go w swojej ofercie. Natomiast alternatywą dla kosztującej ok. 40 złotych płytki z MPR121 może być zamiennik produkowany przez inne firmy.
Potrzebny jest też głośnik, a ponieważ poziom sygnału audio z Raspberry PI jest bardzo niski, przydatny będzie też wzmacniacz - np. regulowany AVT794, zbudowany na układzie LM386. Autor samodzielnie zbudował wzmacniacz właśnie w oparciu o LM386, ale nie będziemy opisywać tego fragmentu projektu, gdyż chcemy skoncentrować się na oprogramowaniu i sprzęcie w postaci modułów.
Oprócz dotąd wymienionych konieczne będą też: zasilacz USB, karta pamięci oraz przewody do połączenia Raspberry PI z modułem Sparkfuna, wyjścia audio z wzmacniaczem, wzmacniacza z głośnikiem a także - co ważne - modułu dotykowego z burakami.
W tym ostatnim przypadku chodzi o dowolne przewody, których końcówki będzie można wbić w buraki. Można przykładowo użyć szpilek lub pinów lutowniczych, przymocowanych do przewodów. Autor zastosował szpilki, których połączenie z przewodami dodatkowo wzmocnił taśmą izolacyjną.
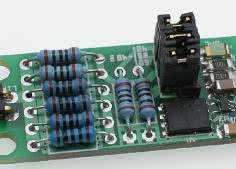
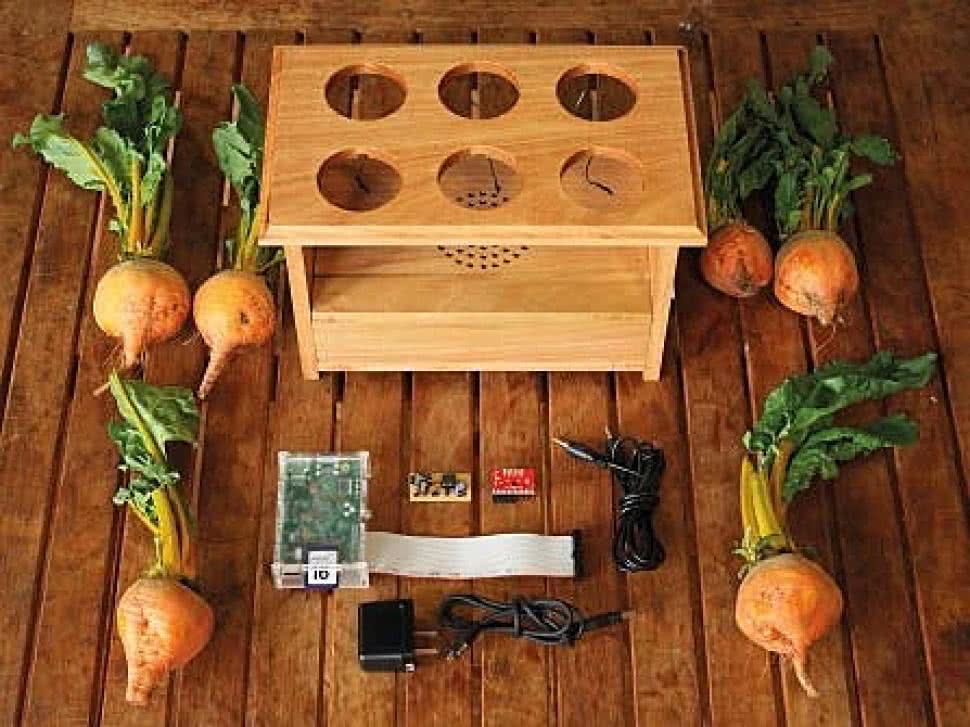
Zestaw komponentów elektrycznych został pokazany na fotografii 3, a schemat na rysunku 4.
Moduły programowe
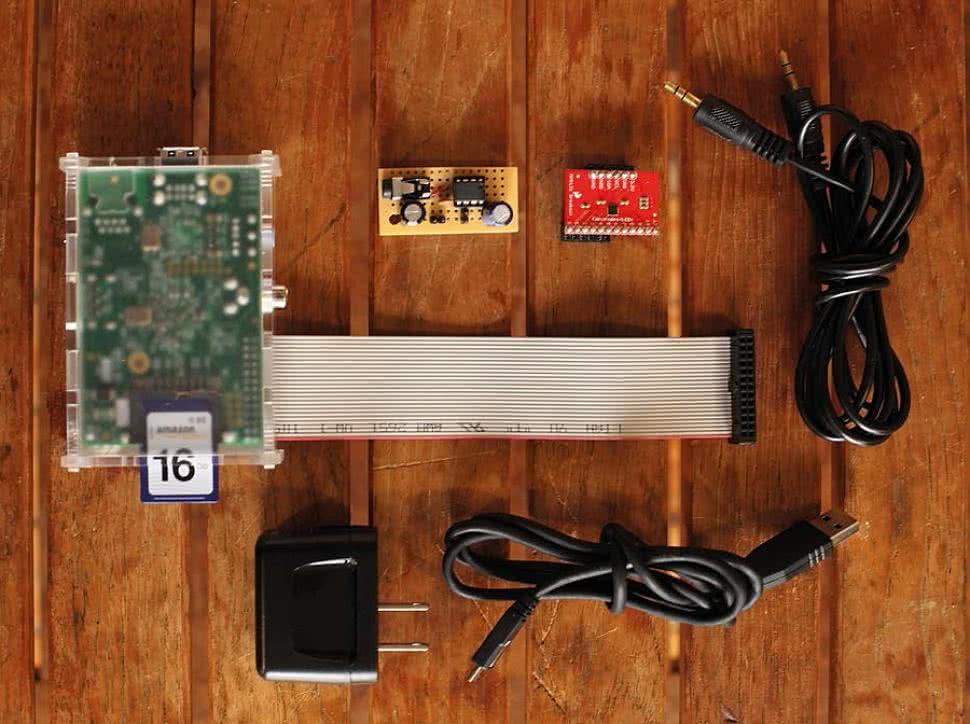
Fotografia 3. Komponenty elektroniczne użyte w projekcie
Działanie urządzenia bazuje na zmianie pojemności buraka, po jego dotknięciu przez człowieka. Zdarzenie to jest wykrywane przez układ MPR121 i przekazywane interfejsem I²C do Raspberry PI. Komputer, w zależności od tego który burak został dotknięty, a więc na której elektrodzie zmieniła się wykrywana pojemność, odtwarza plik dźwiękowy, będący próbką jednego z instrumentów perkusji. Dźwięk po wzmocnieniu przez układ LM386 trafia do głośnika i wydobywa się z obudowy przez nawiercone otwory.
W związku z powyższym, do poprawnego działania urządzenia potrzebne są następujące elementy programowe:
- System operacyjny.
- Interfejs do komunikacji z MPR121 przez I²C.
- Narzędzie do odtwarzania plików dźwiękowych.
- Skrypt kontrolujący odczyty z MPR121 i decydujący, który plik dźwiękowy odtworzyć.
- Pliki dźwiękowe do odtwarzania.
Autor napisał skrypty w Pythonie i skorzystał z biblioteki pygame, która pozwala łatwo odtwarzać multimedia.
Za system operacyjny posłużył standardowy Raspbian, pobrany ze strony internetowej Raspberry PI. Następnie trzeba skonfigurować komputer, by korzystał z interfejsu I²C. Interfejs ten pozwala na podłączanie wielu komponentów za pomocą jednego zestawu przewodów i odwoływanie się do nich po adresach, w związku z czym wymaga konfiguracji. Co więcej, jest on wyprowadzony na pinach GPIO, które mogą być użyte w innym celu.
Konfiguracja
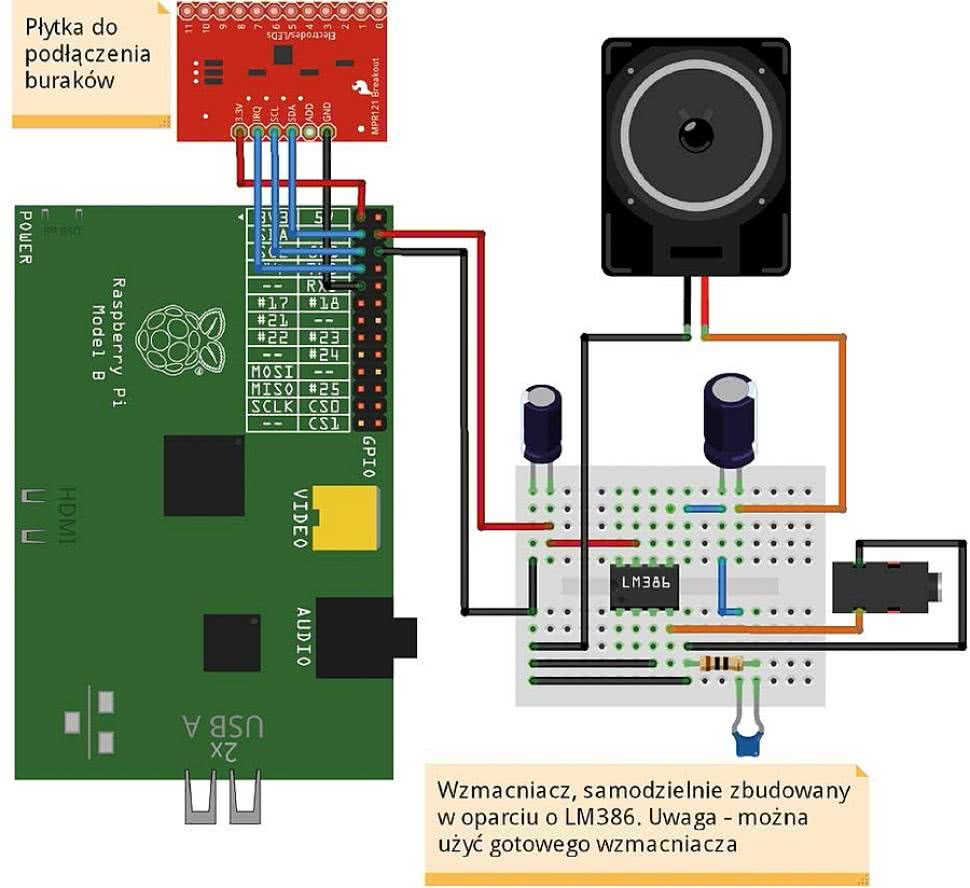
Rysunek 4. Schemat wykonanych połączeń, z uwzględnieniem modułu audio
Aby móc swobodnie posługiwać się I²C z poziomu języka Python warto zainstalować dwa narzędzia: bibliotekę python-smbus i i2c-tools. Odbywa się to za pomocą poleceń:
sudo apt-get install python-smbus
sudo apt-get install i2c-tools
Należy też ustawić obsługę I²C jako domyślnie włączoną - najwygodniej jest to zrobić za pomocą narzędzia raspi-config, wpisując:
sudo raspi-config
a następnie wybierając pozycję Advanced Options i wskazując opcję I²C (rysunek 5). Na ekranie pojawią się jeszcze dwa okienka, w których trakcie konfigurator zapyta o potwierdzenie oraz o wprowadzenie tego ustawienia jako domyślne. W obu przypadkach należy zaznaczyć "YES".
Po restarcie urządzenia poprawność konfiguracji można sprawdzić poprzez podgląd treści pliku /etc/modules, w którym na końcu powinny znaleźć się linijki:
i2c-bcm2708
i2c-dev
Wypada też sprawdzić, czy w systemie istnieje plik /etc/modprobe.c/raspi-blacklist. conf, a jeśli tak, to czy zawiera on linijki:
blacklist spi-bcm2708
blacklist i2c-bcm2708
Jeśli tak, to należy go edytować i wykomentować je, wstawiając znak "#" na ich początkach. W nowszych wersjach Raspbiana konfigurator powinien też zmienić treść pliku /boot/config.txt. Powinny się w nim znaleźć linijki:
dtparam=i2c1=on
dtparam=i2c_arm=on
Jeśli w trakcie sprawdzania konieczne było wprowadzenie jakichkolwiek zmian, system wymaga ponownego restartu.
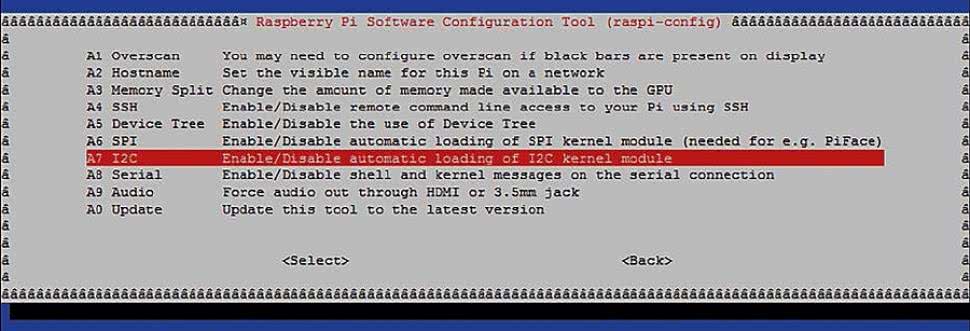
Rysunek 5. Zrzut ekranu konfiguracyjnego Raspberry PI
Po uruchomieniu poprawnie skonfigurowanego Raspberry PI i podłączeniu do niego układu MPR121 można sprawdzić, czy całość się ze sobą komunikuje. W tym celu przydatne będzie polecenie i2cdetect. W przypadku Raspberry PI z 512 MB pamięci RAM należy je wywołać:
sudo i2cdetect -y 1
W starszym modelu z 256 MB pamięci RAM na potrzeby I²C wykorzystano port 0 a nie port 1, w związku z czym detekcję należałoby wykonać poleceniem:
sudo i2cdetect -y 0
Polecenia te przeszukują urządzenia podmontowane w /dev/i2c-1 lub / dev/i2c-0 w poszukiwaniu podłączonych komponentów. Układ MPR121 jest skonfigurowany do pracy pod adresami 0x5A, 0x5B, 0x5C lub 0x5D, w zależności od sposobu podłączenia pinu ADDR.
W przypadku płytki firmy Sparkfun domyślny adres to 0x5A, ale można go zmienić zmieniając ustawienie zworek. Pin ADDR można zewrzeć z pinami VSS, VDD, SDA albo SCL, przy czym nie można zwierać z więcej niż jednym na raz.
Obsługa MPR121
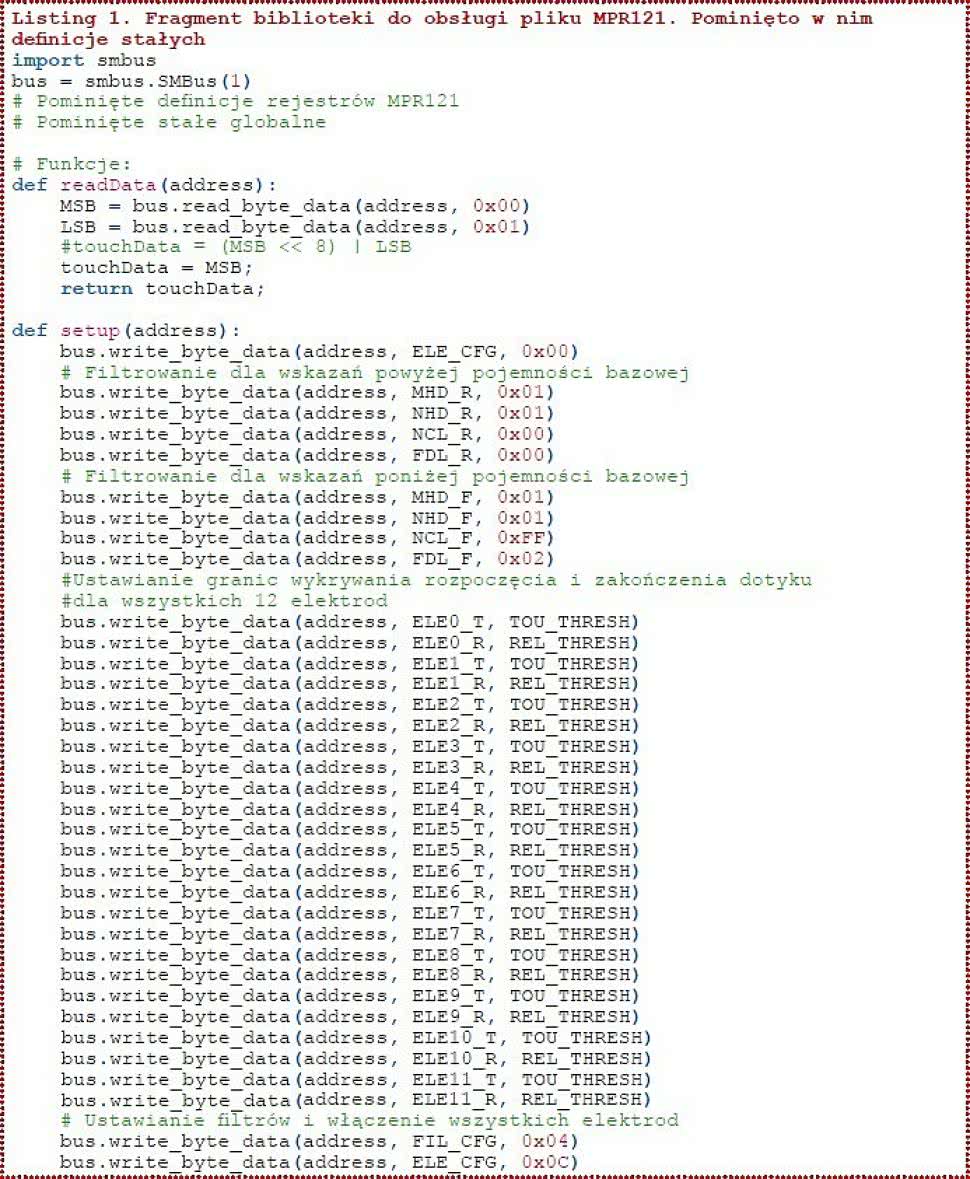
Listing 1. Fragment biblioteki do obsługi pliku MPR121. Pominięto w nim definicje stałych
Układ MPR121 pozwala na podłączenie nawet 12 elektrod, ale w projekcie wykorzystano tylko 6 z nich. Co więcej, 8 z 12 elektrod może posłużyć jako uniwersalne wejścia i wyjścia - np. do zasilania diod LED, ale tego również nie wykorzystano.
MPR121 ma natomiast bogate funkcje w zakresie wykrywania dotyku, a nawet może posłużyć do wykrywania zbliżającego się obiektu, jeśli wszystkie elektrody znajdują się blisko siebie. Informacje o dotyku są przekazywane w 12 kanałach, a w wypadku uruchomienia wykrywania zbliżania się, udostępniany jest symulowany, 13 kanał.
Co ważne, MPR121 ma wbudowane zaawansowane cyfrowe mechanizmy filtrowania odbieranych sygnałów, dzięki czemu praca z nim jest bardzo łatwa. Dotyk wykrywany jest poprzez monitorowanie pojemności na elektrodach - na każdej niezależnie.
Układ wykrywa pojemność od 10 pF do 2000 pF z dokładnością do 0,01 pF. Dzieje się to poprzez zmienianie ilości ładunku i czasu, przez który jest wprowadzany na poszczególne elektrody. Następnie układ mierzy napięcie na pinach, do których podłączone są elektrody - jest ono odwrotnie proporcjonalne do pojemności. Całość odbywa się w cyklach. Na końcu każdego z cykli napięcie to jest próbkowane przez wbudowany 10-bitowy przetwornik analogowo-cyfrowy i przetwarzane.
Układ informuje zarówno o dotknięciu podłączonego obiektu, jak i o zakończeniu dotyku. Wystąpienie tych zdarzeń jest determinowane w oparciu o porównanie chwilowej pojemności z bazową. Ta natomiast jest stale śledzona przez MPR121, tak by uwzględnić fluktuacje tła.
Różnica pomiędzy aktualną wartością bazową, a wartością chwilową, która ma decydować o wykryciu dotknięcia może być zdefiniowana przez użytkownika - niezależnie dla każdej elektrody. Co ważne, możliwe jest też zdefiniowanie czasu ślepego, by uniknąć wykrywania fałszywych zdarzeń, wywołanych np. przez drgania, zaraz po faktycznym dotyku.

Listing 2. Główna pętla programu, odpowiadająca za analizę danych z MPR121 i wydawanie poleceń związanych z odtwarzaniem dźwięku
Obsługa układu MPR121 sprowadza się do jego konfiguracji, a następnie cyklicznego odczytywania danych. W tym celu użyteczne są dwie funkcje biblioteki, które przedstawiono na listingu 1. Najpierw należy wywołać funkcję setup(), podając jej skonfigurowany adres MPR121. W niniejszym przykładzie włączane są wszystkie elektrody, mimo że faktycznie używanych jest tylko 6. Funkcja readData() zwraca wczytane dane o wykrytym dotyku.
Dane te są następnie używane w pętli w programie głównym, którą pokazano na listingu 2. Dotychczasowy stan elektrod (a więc tego, czy buraki były dotknięte) jest zapisywany w tablicy touches. Działająca w nieskończoność pętla powoduje wczytanie informacji z czujnika do zmiennej touch-Data (polecenie touchData = mpr121.read-Data(0x5a)), po czym dla pierwszych 6 elektrod dokonywane jest sprawdzenie, czy wykrywają one aktualnie dotyk, czy nie.
Jeśli tak, program odczytuje dotychczasowy stan buraka i gdy wynika z niego, że burak jeszcze przed chwilą nie był dotykany, włącza funkcję odtwarzającą przypisany danemu warzywu dźwięk oraz informuje o dotknięciu wpisując informację w konsoli (na ekranie, gdyby takowy był podłączony). Następnie aktualizuje stan danego buraka w tablicy touches.
Jeśli z świeżo wczytanych danych wynika natomiast, że dany burak nie jest aktualnie dotykany, program także sprawdza dotychczasowy stan i informuje w konsoli o ewentualnym zaprzestaniu dotknięcia, po czym aktualizuje tablicę touches.
Obsługa dźwięku
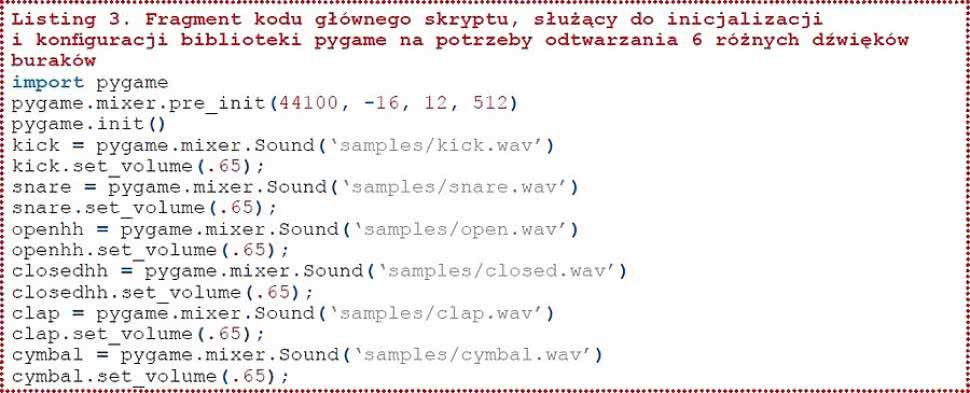
Listing 3. Fragment kodu głównego skryptu, służący do inicjalizacji i konfiguracji biblioteki pygame na potrzeby odtwarzania 6 różnych dźwięków buraków
Pozostaje jeszcze kwestia obsługi dźwięku. W tym celu potrzebna jest biblioteka pygame. Jeśli nie jest ona domyślnie zainstalowana w pobranej wersji systemu operacyjnego, trzeba ją ręcznie doinstalować, ale standardowo jest obecnie w Raspbianie.
Obsługa pygame na potrzeby tego projektu jest bardzo prosta. Wystarczy zaimportować bibliotekę, skonfigurować parametry miksera dźwięku, zainicjalizować bibliotekę, stworzyć obiekty dźwiękowe klasy pygame.mixer.Sound, które będą wskazywać na odpowiedni plik z próbką dźwięku do odtworzenia oraz zawierać ustawienie odnośnie pożądanej głośności. Polecenia te widać na listingu 3. Samo odtwarzanie dźwięku polega na wywołaniu funkcji pygame.mixer.Sound.play(), dla danego, stworzonego wcześniej obiektu dźwiękowego.
Warto zauważyć, że pliki audio są zapisane w formacie .wav, a ustawiona głośność jest identyczna i stała dla każdego z nich.
Podsumowanie i ocena projektu

Fotografia 6. Gotowy projekt - warto zwrócić uwagę na sposób wykonania obudowy
Cały kod programu, wraz z plikami audio, znajduje się pod adresem: https://github.com/scottgarner/BeetBox. Program uruchamia się poleceniem:
sudo python beetbox.py
Elementy potrzebne do zmontowania BeetBoxa pokazano na fotografii 6, a zbliżenie na gotowy projekt na fotografii 6.
Autorowi należy pogratulować pomysłu - zarówno idea, zgrabnie dobrana nazwa i wykonanie są bardzo udane. Trudno nam oceniać walory dzieła z punktu widzenia sztuki, ale wydaje się, że jeśli ktoś opracuje coś co wygląda intrygująco, co wcześniej nie powstało, albo przynajmniej nie zostało spopularyzowane, to można to nazwać sztuką i z tego punktu widzenia BeetBox również wydaje się udany. Natomiast z punktu widzenia inżynierskiego można wyobrazić sobie wiele modyfikacji.
Po pierwsze, projekt jest zasilany z użyciem zasilacza podłączanego do sieci elektrycznej. Oznacza to, że z pudełka będzie wystawał kabel, którego na zdjęciach gotowego urządzenia nie widać. Na pewno psuje to wrażenia użytkownika, od razu niszcząc wizję prostej skrzynki na warzywa.
Zamiast tego można byłoby zastosować akumulator z przetwornicami tak, by całość można było naładować i odłączyć od zasilania. Prawie nic nie stoi też na przeszkodzie, by użyć pakietu wymiennych baterii, dzięki czemu nie trzeba byłoby zostawiać miejsca na wtyczkę. Wystarczyłoby jedną ze ścianek zrobić wysuwaną, na potrzeby wymiany pakietu zasilającego.
Niestety, przy tak stworzonym programie, akumulator czy baterie szybko zostałyby wyczerpane. Wynika to przede wszystkim z braku jakiegokolwiek sterowania włączeniem i wyłączeniem urządzenia oraz z tego, że autor nie zastosował żadnych trybów uśpienia. Problematyczne jest też zapotrzebowanie na prąd głośnika, ale zależy ono od parametrów całej sekcji audio. Dobrym pomysłem wydaje się po prostu umieszczenie włącznika wewnątrz otwieranej obudowy.
Sam program również mocno obciąża procesor, gdyż działa w pętli bez jakiegokolwiek odpoczynku. Dotknięcie buraków monitorowane jest nieprzerwanie, a dane pobierane na tyle często, na ile pozwala magistrala I²C.
Aby zmniejszyć pobór prądu można byłoby wprowadzić tryb uśpienia, w którym po dłuższym czasie nieużywania (brak zmiany stanu buraków) procesor rzadziej odpytywałby układ MPR121. Np. po 30 sekundach bez interakcji z użytkownikiem, można byłoby wprowadzić 1-sekundowe opóźnienie przed każdorazowym odpytaniem sensora dotykowego, znacząco zmniejszając w ten sposób obciążenie procesora.
W momencie wykrycia pierwszego dotyku po przerwie, urządzenie wracałoby do normalnego trybu. Alternatywnie można wykorzystać jedną z nieużywanych elektrod do stworzenia niepozornego przycisku dotykowego, służącego jako włącznik i wyłącznik. Celem zaoszczędzenia energii można również wyłączyć nieużywane elementy - hub USB i HDMI, dostępne w zależności od wersji Raspberry PI.
Projekt można też rozwinąć, korzystając z faktu, że MPR121 ma aż 12 elektrod. Co więcej, układ ten pozwala na konfigurację 1 z 4 adresów dla magistrali I²C, a więc łącznie do jednego Raspberry PI, bez problemu można podłączyć właśnie 4 takie podzespoły, co daje razem 48 wykrywanych punktu dotyku. To umożliwia już stworzenie całkiem pokaźnej klawiatury muzycznej - czy to z marchewek i pietruszki, czy z ogórków lub pomidorów - zależy tylko od inwencji twórczej wykonawcy.
Pewną trudność może stanowić natomiast fakt, że MPR121 został już oficjalnie wycofany z produkcji. W ofercie NXP, które niedawno kupiło firmę Freescale jest podobny, ale mniej rozbudowany układ: MPR03x. Pozwala on na podłączenie jedynie trzech elektrod, ale dostępny jest w dwóch wersjach (MPR031 i MPR032), różniących się wpisanym na stałe adresem w magistrali I²C (odpowiednio 0x4A i 0x4B).
Oznacza to, że używając tylko nowych komponentów i bazując pod tym względem na ofercie NXP można stworzyć maksymalnie 6-burakowego BeetBoxa. Z drugiej strony, używając MPR03x w połączeniu z czterema MPR121, dzięki temu, że wszystkie one mają odmienne adresy, da się w jednym systemie z jedną magistralą I²C stworzyć nawet 54-klawiszowego BeetBoxa. Wystarczy to również do budowy 4-oktawowego keyboardu.
W wersji z 6 burakami można też wykorzystać pozostałe 6 elektrod i podpiąć je do tych samych warzyw, ale ustawiając na nich zupełnie inne progi wykrywania dotyku, dzięki czemu - jeśli dobrze poeksperymentować, może udałoby się uzależniać wydawany dźwięk od tego, jak buraki zostały dotknięte.
Praktycznie nic nie stoi na przeszkodzie, by Raspberry PI podłączyć do sieci bezprzewodowej, by za pomocą buraków sterować innymi urządzeniami elektronicznymi. A korzystając z przykładu implementacji klawiatury Bluetooth HID, opublikowanego również w tym numerze EP, można takiego BeetBoxa np. bardzo łatwo podłączyć do telefonu komórkowego.
Dla maksymalizacji efektu zaskoczenia, buraki można by było umieścić w małych doniczkach, a te włożyć do w pełni obudowanej skrzynki BeetBoxa, po czym całość przysypać suchą ziemią do kwiatów, by zasłonić krawędzie pojedynczych doniczek.
Trzeba byłoby się tylko upewnić, że obwód pomiędzy poszczególnymi burakami nie jest zamknięty poprzez otaczającą ich ziemię. Być może udałoby się nawet stworzyć prawdziwe, rosnące w ten sposób warzywa (jedna wbita w nie szpilka nie powinna bardzo utrudniać wzrostu), które pomimo podlewania zachowywałyby swoją zdolność do detekcji dotyku, a w konsekwencji do korzystania z prawdziwie żywego BeetBoxa.
Marcin Karbowniczek, EP