Zaloguj
Zaloguj




- Wykrywanie zbyt wysokiego lub zbyt niskiego napięcia w układach zasilania.
- Wykrywanie przeciążenia w układach sterowania silnikami elektrycznymi.
- Wykrywanie niskiego napięcia baterii.
- Zasilacze impulsowe (wykrywanie impulsów prądowych).
- Komparator analogowy w układach analogowych kontrolowanych za pomocą mikrokontrolera.
Typowy moduł komparatora zaimplementowany w mikrokontrolerach z rodziny PIC16F1xxx jest wyposażony w dwa multipleksery wejściowe (po jednym dla każdego wejścia), jak pokazano na rysunku 2. Napięcie wejściowe jest pobierane z wyprowadzeń mikrokontrolera, wyjścia modułu wewnętrznego napięcia referencyjnego FVR lub z wyjścia przetwornika C/A. Ten przetwornik, zależnie od typu mikrokontrolera, może być 5-, 8- lub 10-bitowy. Wynik porównania może być:
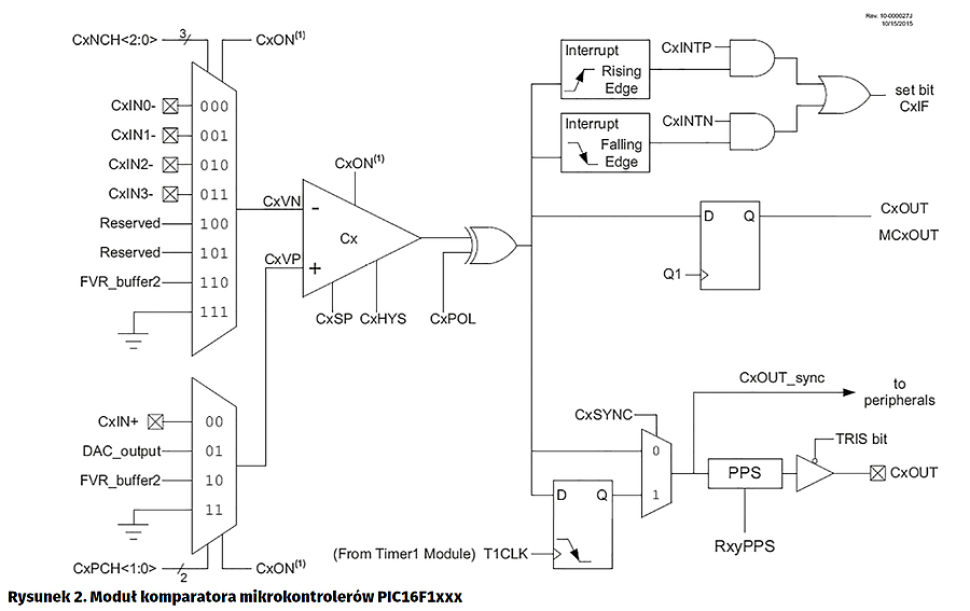
- Dostępny jako sygnał wewnętrzny CxOUT. Ten sygnał można łączyć wewnętrznie z innymi modułami peryferyjnymi.
- Dostępny jako flaga generowania przerwania CxIF. Przerwanie jest wyzwalane narastającym zboczem, opadającym zboczem (lub jednym i drugim). Ustawienie flagi CxIF może tez wybudzać mikrokontroler ze stanu uśpienia.
Nawet tak prosty w działaniu moduł wymaga skonfigurowania: trzeba wybrać sygnały wejściowe, ustalić polaryzację sygnału wyjściowego (wprost/zanegowany), skonfigurować polaryzację sygnału wyzwalania przerwania, włączyć lub wyłączyć histerezę przełączania, zaprogramować przypisanie wyjść sygnału CxOUT (moduł PPS) i w końcu włączyć moduł.
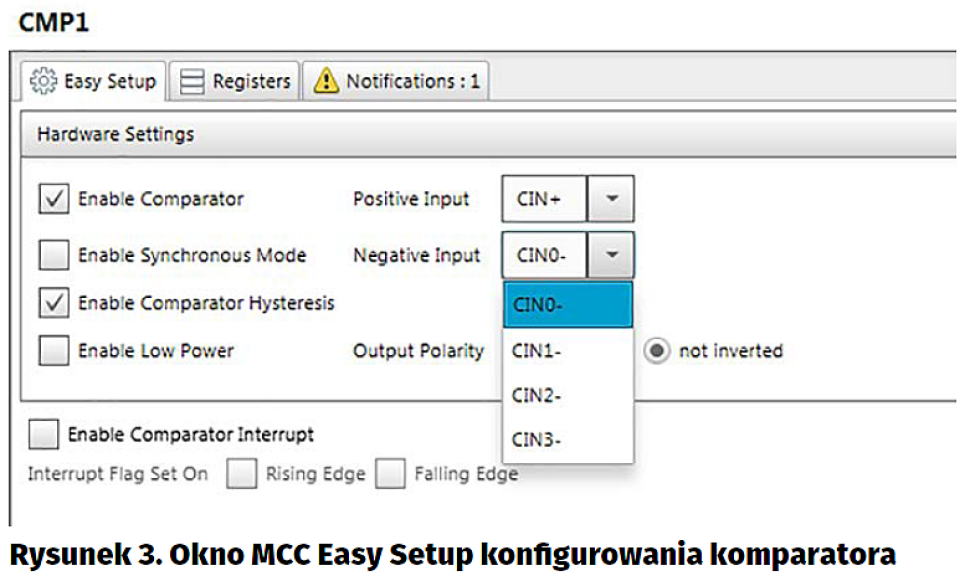
- Enable Comparator – włącza i wyłącza moduł komparatora.
- Enable Synchronous Mode – umożliwia pracę synchronicznie z taktowaniem rdzenia.
- Enable Comparator Hysteresis – włączenie histerezy progu komparatora. Histereza ma stałe napięcie 25 mV.
- Enable Low Power – włączenie trybu oszczędzania energii.
- Output Polarity – zanegowany/niezanegowany.
- Wejście dodatnie Positive Input – wybór z rozwijanej listy sygnału wejściowego na wejściu dodatnim komparatora.
- Wejście ujemne Negative Input – wybór z rozwijanej listy sygnału wejściowego na wejściu dodatnim komparatora.
- Enable Comparator Interrupt – odblokowanie zgłaszania przerwań i wybór zbocza.
MCC generuje dwie funkcje:
1) CMP1_Initialize() inicjalizującą moduł komparatora zgodnie z wykonanymi ustawieniami (listing 1).
2) CMP1_GetOutputStstus() odczytującą stan wyjścia komparatora (listing 2).
Moduł Curiosity jest wyposażony w potencjometr i za jego pomocą można przetestować działanie komparatora. Napięcie z wyjścia komparatora będzie porównywane z napięciem referencyjnym Fixed Voltage Reference (FVR).
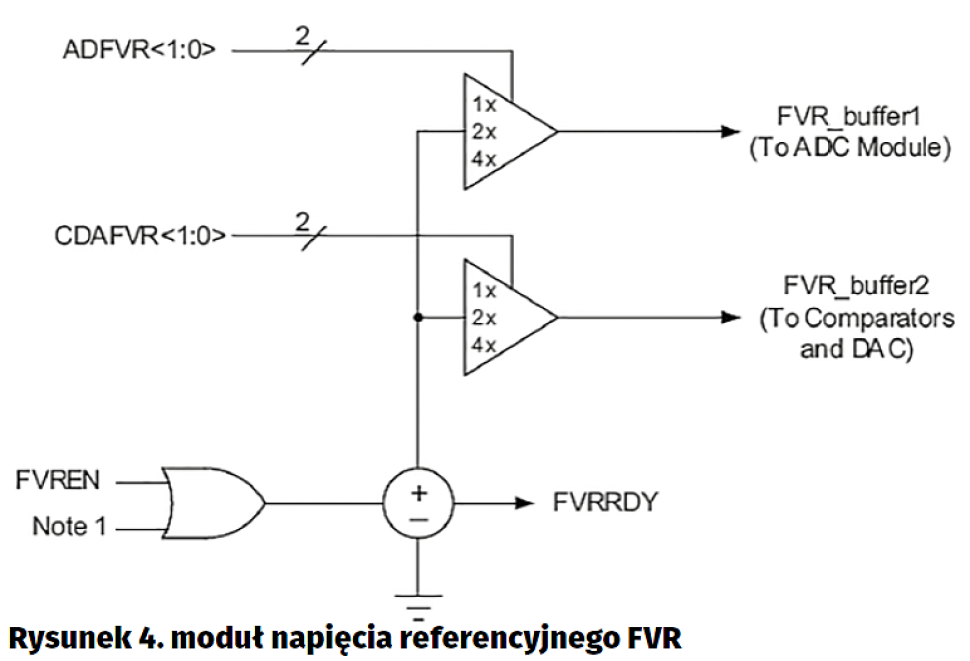
Moduł napięcia referencyjnego FVR
Napięcie referencyjne jest używane przez moduły komparatora i przetworników A/C i C/A. W układach niewymagających dużej dokładności pomiaru napięciem referencyjnym dla przetworników jest napięcie zasilania Vdd. Jeżeli jest potrzebna większa dokładność, to precyzyjne napięcie referencyjne może być podawane z zewnątrz przez odpowiednie wejście.
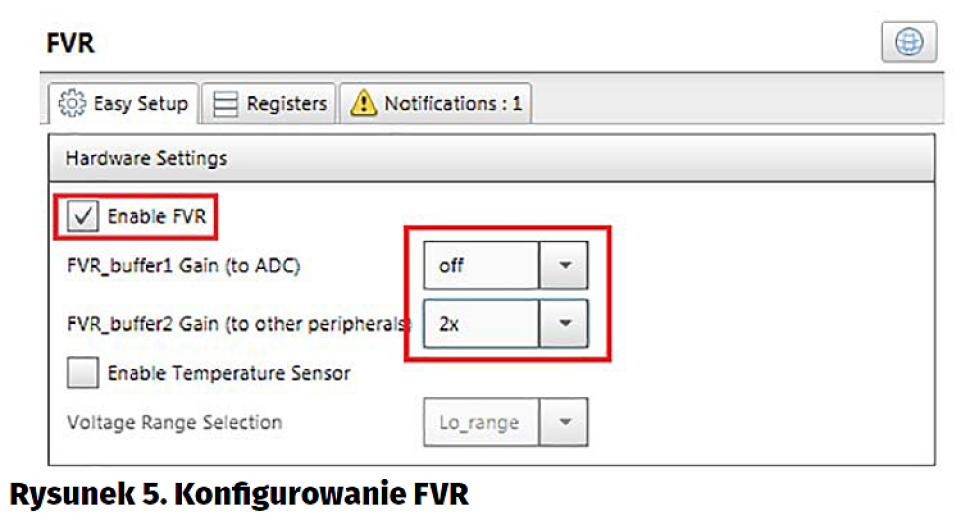
MCC generuje dwie funkcje: konfiguracyjną FVR_initialize() i zwracająca status FVR_IsOutputReady(). Pokazano je na listingu 2.
Komparator + FVR – testy praktyczne
Mamy skonfigurowany komparator z napięciem FVR (bufor2) dołączonym do wejścia dodatniego. Napięcie FVR jest równe 2,048 V. Wejście ujemne CIN1- przypisałem do wyprowadzenia RC1 (nóżka 15). Trzeba teraz suwak potencjometru połączyć z CIN1- i testować stan wyjścia komparatora.
Program główny uzupełniamy o pętle nieskończoną pokazaną na listingu 3. Funkcja CMP1_GetOutputStatus() odczytuje i zwraca stan wewnętrznego sygnału MC1OUT (rys. 2). W module Curiosity zamontowano 4 diody świecące połączone przez rezystory 1 kV z liniami portów RA5, RA2, RC5 i sygnałem PGEC (zegar interfejsu programującego ICSP). Ustawienie linii sterującej diodą powoduje jej zaświecenie, więc jeśli na RA2 wystąpi poziom wysoki i ta linia jest skonfigurowana jako wyjście, to LED D6 się zaświeci. Jeśli funkcja CMP1_GetOutputStatus zwróci prawdę, czyli napięcie na wejściu ujemnym połączonym z suwakiem potencjometru będzie mniejsze od napięcia z modułu FVR równego 2,048 V, to dioda LED pozostanie zaświecona.
Można zdefiniować negowanie wyjścia komparatora i dioda będzie się zaświecała przy napięciu wyższym od napięcia VFR. Mikrokontroler w module jest zasilany napięciem +3,3 V. Wykonałem 2 próby: dla napięcia referencyjnego 1,024 V i napięcia 2,048 V. W obu wypadkach komparator działał prawidłowo.
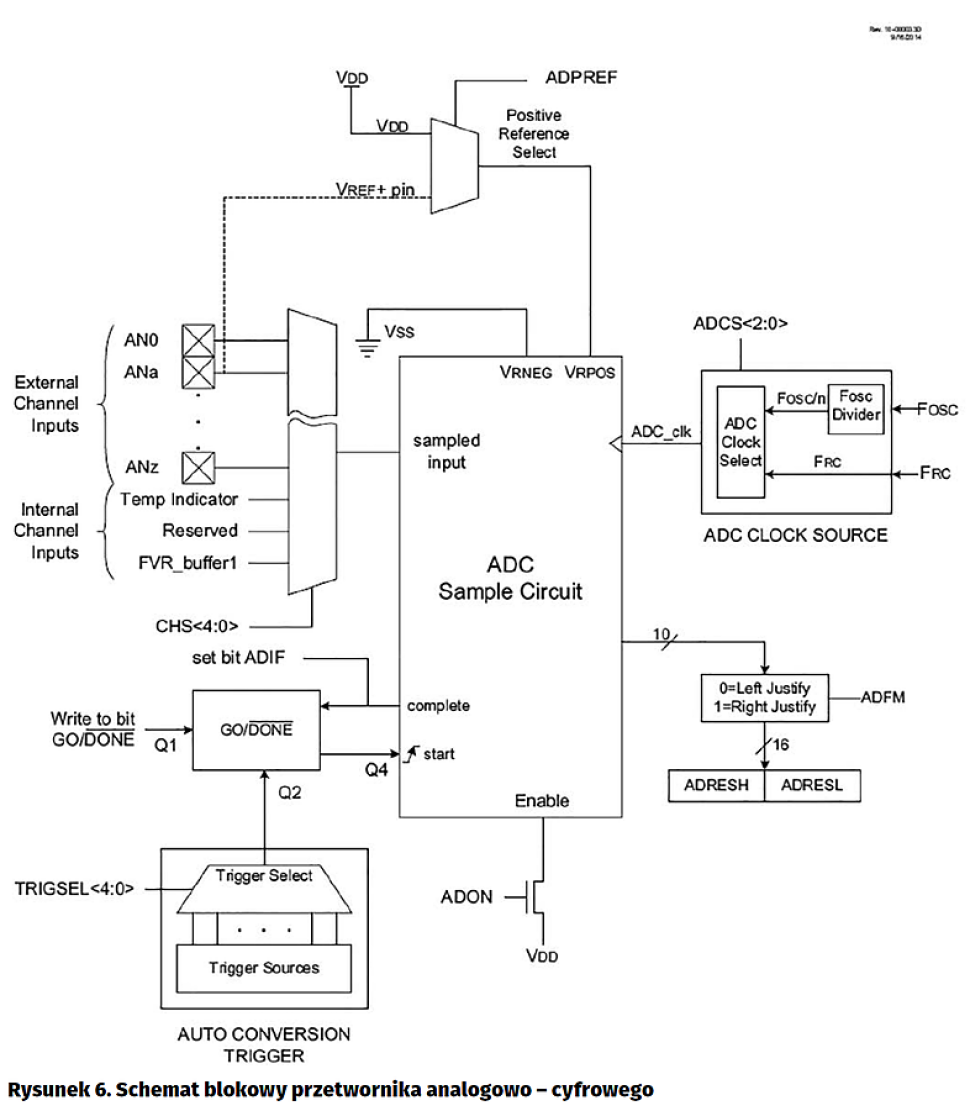
Parametrem przetwornika A/C, na który przede wszystkim zwracamy uwagę, jest jego rozdzielczość bitowa. Teoretycznie – im większa rozdzielczość, tym lepiej, ale w praktyce duża rozdzielczość może być degradowana przez błędy przetwornika wynikające z, na przykład, nieliniowości przetwarzania lub z offsetu. Mikrokontrolery z rodziny PIC16F1xxx mają wbudowany przetwornik o rozdzielczości 10 bitów i małym błędzie przetwarzania wynoszącym typowo ±1 LSB, nieprzekraczającym ±2,5 LSB dla maksymalnego błędu wzmocnienia.
Kolejnym ważnym parametrem jest liczba wejść analogowych W naszym mikrokontrolerze może ich być 12. Poza tymi wejściami przetwornik może mierzyć napięcie z wyjścia AN1 przetwornika cyfrowo analogowego C/A, modułu pomiaru temperatury i modułu napięcia referencyjnego FVR_buffer_1.
Chociaż programowe wyzwolenie przetwarzania wymaga działania rdzenia (ustawienie bitu GO), to można alternatywnie użyć wyzwalania sprzętowego. Uzyskuje się wtedy niezależną synchronizację pomiędzy konwersją, a innymi peryferiami. Dzięki tej właściwości jest możliwe zbudowanie kompletnego rozbudowanego połączenia pomiędzy peryferiami analogowymi i cyfrowymi pracującego niezależnie od rdzenia mikrokontrolera. Przy projektowaniu układu pomiarowego należy pamiętać, że przetwornik ma niską impedancję wejściową. Rekomendowana przez producenta impedancja źródła mierzonego napięcia nie powinna być większa niż 10 kV.
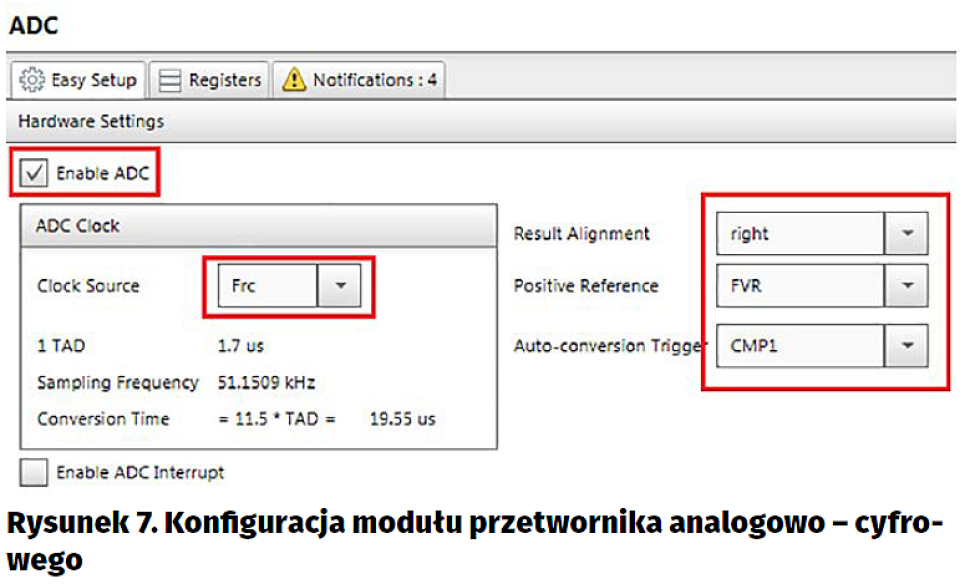
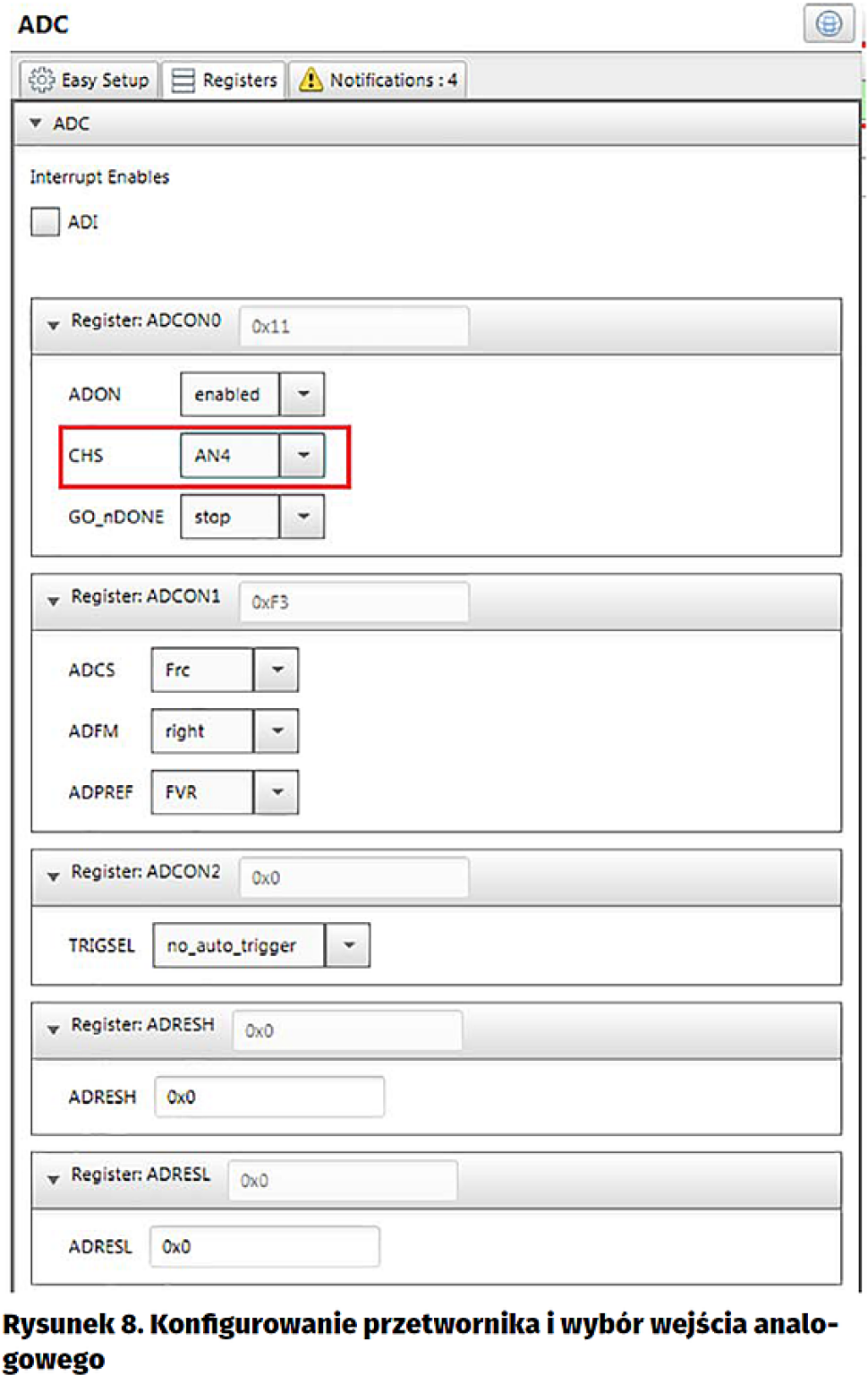
Konfigurowanie przetwornika poprzez MCC można podzielić na dwa etapy. Pierwszy z nich to konfiguracja modułu przetwornika, a drugi konfiguracja wejścia analogowego. Na rysunku 7 pokazano okno ADC Easy Setup. Wybieramy tu: włączenie modułu przetwornika (enable ADC), wybór zegara taktującego (clock source), sposób zapisania 10-bitowego wyniku konwersji w rejestrze 16-bitowym (dosunięty do lewej lub dosunięty do prawej) oraz sposób wyzwalania konwersji automatycznej (tu wyjście CMP1). Dodatkowo, można odblokować zgłaszanie przerwań od zdarzenia zakończenia konwersji. W zakładce ADC registers są powtórzone ustawienia z Easy Setup, ale można tu dodatkowo wybrać aktywne wejście analogowe. Oczywiście, kiedy nasza aplikacja tego wymaga, to program użytkownika może wybierać inne dostępne wejścia według potrzeb.
Po skonfigurowaniu modułu MCC generuje kilka przydatnych funkcji. Pierwszą z nich jest inicjalizacja modułu według wprowadzonych ustawień – listing 4. Pokazana na listingu 5 funkcja ADC_StartConversion (adc_channel_t channel) wybiera aktywne wejście analogowe i programowo wyzwala konwersję. Kolejna funkcja – adc_result_t ADC_GetConversion(adc_channel_t channel) – wybiera aktywne wejście, wyzwala programowo konwersję, czeka na jej zakończenie i zwraca wynik w postaci liczby 16 bitowej (listing 7).
Testy praktyczne
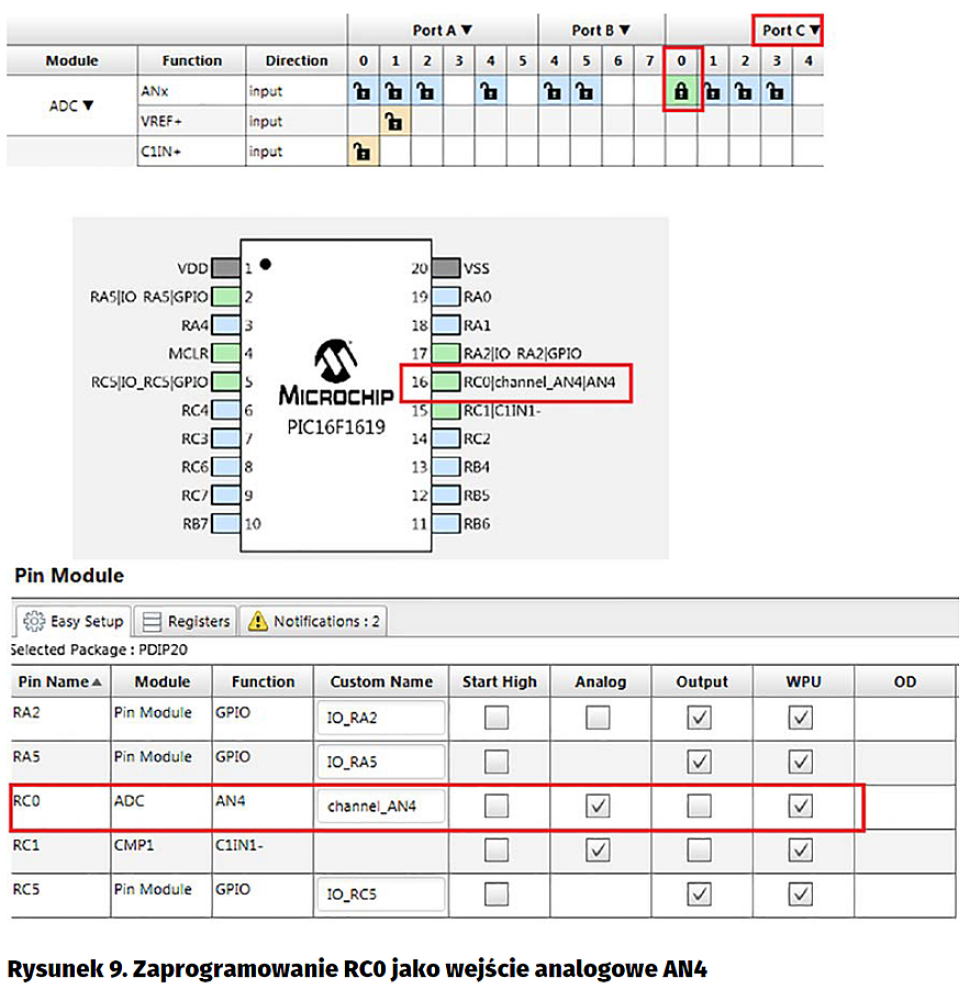
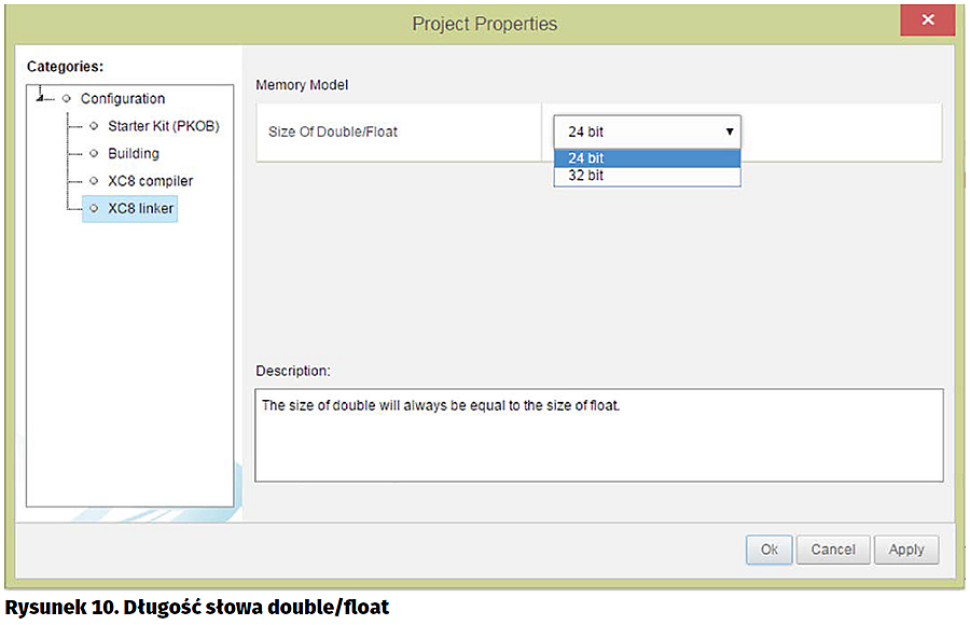
Wygenerowane przez MCC funkcje konfiguracji i wyzwalania konwersji możemy użyć do praktycznych testów działania przetwornika. Ze schematu ideowego modułu Curiosity wynika, że suwak potencjometru modułu można poprzez zworkę J3 połączyć z linią portu RC0 będącą jednocześnie wejściem analogowym AN4. Napięcie na suwaku będzie się zmieniało od 0 V do +3,3 V (Vdd), więc ustawimy w konfiguracji przetwornika Positive reference VDD (rys. 7). Zakres pomiarowy napięcia wejściowego jest równy 3,3 V, a rozdzielczość 10 bitów. Zmiana wartości na ostatnim bicie odpowiada zmianie napięcia równej 3,3 V/1024=3,22 mV. Przeliczanie wartości z wyjścia przetwornika na napięcie wyrażone w woltach będzie polegało na pomnożeniu przez 3,22 i podzieleniu przez 1000. Dokładność wyniku zależy też od długości słowa zmiennoprzecinkowego. W ustawieniach linkera XC8 można wybrać długość 24- lub 32-bitową (rysunek 10). Deklaracje float, double i long double mają taką samą liczbę bitów. Wersja bezpłatna kompilatora obsługuje tylko słowa mieszczące 24 bity, więc używając jej nie mamy większego wyboru.
Ponieważ zestaw nie ma wyświetlacza, to posłużymy się sprzętowym symulatorem wbudowanym w moduł Curiosity i obsługiwanym przez MPLAB. Niestety, próby użycia debugera z poziomu MPALB Xpress się nie powiodły. Co prawda, debuger się uruchamiał, program się zatrzymywał na pułapce, ale nie można było podejrzeć wartości zmiennych, a to było głównym zadaniem tego testu. Po kilku niepowodzeniach skonfigurowałem przetwornik za pomocą „stacjonarnego” MPLAB X IDE i wszystko zadziałało.
- Uruchamiamy debuger za pomocą ikony z paska narzędzi debugera.
- Ustawiamy punkt zatrzymania/pułapkę na pierwszej instrukcji po sprintf.
- Uruchamiamy wykonywanie programu.
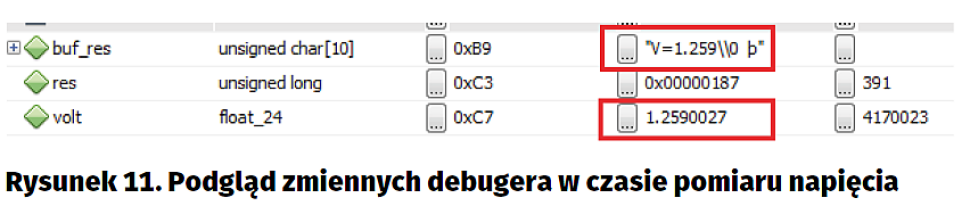
- Kiedy program się zatrzyma na pułapce otwieramy okno Variables, w którym można zobaczyć wartość zmiennych programu (rysunek 11).
Poprawność pomiaru najłatwiej sprawdzić mierząc multimetrem napięcie na suwaku potencjometru i porównując je z wynikami wyliczonym przez program. W moim wypadku pomiar zgadzał się z dokładnością do 1 mV.
Tomasz Jabłoński, EP