Zaloguj
Zaloguj



Mikrokontroler w roli komponentu elektronicznego stał się tak pospolity, jak niegdyś tranzystor, a wcześniej lampa elektronowa. Ta popularność to wynik splotu wielu czynników: małej ceny, elastyczności zastosowań, szerokiej oferty, ale też umiejętności elektroników – programistów potrafiących go poprawnie zastosować i oprogramować w różnych aplikacjach. Firmy projektujące i produkujące mikrokontrolery stosują różne strategie, by pozyskać klientów w różnych obszarach zastosowania. Jedną z bardziej nośnych jest stosowanie szybkich 32-bitowych jednostek zamiast starszych 8-bitowych. Sprzyjać temu ma kompatybilność obudów pin-to-pin i niska cena, porównywalna z ceną prostych mikrokontrolerów. Ma to wiele zalet, ale też i wady. Programowanie 32-bitowców wymaga większej wiedzy programistów, zazwyczaj peryferie brane wprost z dużych jednostek są skomplikowane i trudniejsze w konfiguracji. Nie każdy projekt wykorzystujący mikrokontrolery musi być programowany przez programistę o wyższych kwalifikacjach. Z tych i podobnych powodów są nadal bardzo chętnie stosowane proste (z dzisiejszego punktu widzenia) jednostki 8-bitowe, mimo że ich cena jest porównywalna z „przeskalowanymi” 32-bitowcami.
Środowisko projektowe, kompilator i moduł ewaluacyjny
Do mikrokontrolerów są potrzebne odpowiednie narzędzia programowe. Microchip jest znany z tego, że zapewnia swoim klientom pełne wsparcie w postaci środowiska projektowego MPALB IDE, kompilatorów języka C oraz modułów ewaluacyjnych. Pakiet MPALB IDE jest bezpłatny, podobnie jak kompilatory C. Trzeba jednak pamiętać, że kompilatory C mogą być używane bez ograniczeń, w tym również do zastosowań komercyjnych, ale w wersjach bezpłatnych mają wyłączoną optymalizację wielkości lub szybkości kodu. Jeżeli zależy nam na optymalizowaniu kodu, to trzeba wykupić odpowiednią licencję.
Środowisko MPLAB X IDE można pobrać bezpłatnie ze strony producenta. Od jakiegoś czasu jest dostępna też wersja MPAB Xpress pracująca w chmurze, niewymagająca instalowania IDE i kompilatora C. Oba rozwiązania mają wady i zalety. Jeżeli pracujemy nad projektem w jednym miejscu i na jednym komputerze, to MPLAB X IDE jest wygodniejsze. Kiedy jednak pracujemy jednocześnie w domu, zakładzie, na uczelni, w delegacji itp., to MPLAB XPRESS daje więcej swobody i pozwala w prosty sposób korzystać z różnych komputerów bez konieczności przenoszenia aktualnej wersji projektu na każdy z nich.
Idea aplikacji pracujących w chmurze opiera się na dostępie do Internetu. Użytkownik nie zapisuje w pamięci swojego komputera wersji instalacyjnej programu i go nie instaluje. W czasie pracy nie zapisuje na dysku swojego komputera efektów pracy. Aplikacja jest otwierana poprzez okno przeglądarki internetowej na dowolnym komputerze dołączonym do Internetu. Wszystkie pliki są umieszczane gdzieś w pamięci jakichś serwerów. Użytkownik tworzy sobie konto z nazwą i hasłem i to konto identyfikuje projekty aplikacji.
MPLAB X IDE pobiera się ze strony https://goo.gl/OhNjFe, a kompilator MPLAB XC-8 ze strony https://goo.gl/x4rlyP. Przy instalowaniu MPLAB X IDE trzeba pamiętać o odinstalowaniu wcześniejszych wersji za pomocą ich własnego deinstalatora. Wtedy po zainstalowaniu nowszej wersji będą pamiętane i otworzone konfiguracje projektów i ustawienia już zainstalowanych kompilatorów.
Do celu tego artykułu korzystałem z pakietu MPLAB Xpress. Aby z niego korzystać, trzeba najpierw się zarejestrować (utworzyć konto) na stronie firmy Microchip. Jest to jedno wspólne konto, potrzebne na przykład do dostępu do próbek układów, dostępu do kompilatorów, dostępu do pomocy technicznej itp.
Do uruchomienia IDE wchodzimy na stronę https://goo.gl/U62SUF i logujemy się do swojego konta klikając na My Account (login/register). Po prawidłowym wpisaniu użytkownika (adresu e-mail) i hasła otwiera się okno MPLAB Xpress.
Interfejs Xpress jest prawie identyczny z interfejsem MPLAB X IDE. Niewielkie uproszczenia są głównie wynikiem ograniczenia funkcjonalności do mikrokontrolerów 8-bitowych i możliwości stosowania trzech programatorów/debuggerów. Do dyspozycji jest jak na razie tylko jeden plug-in MCC.
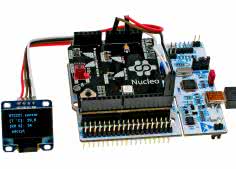
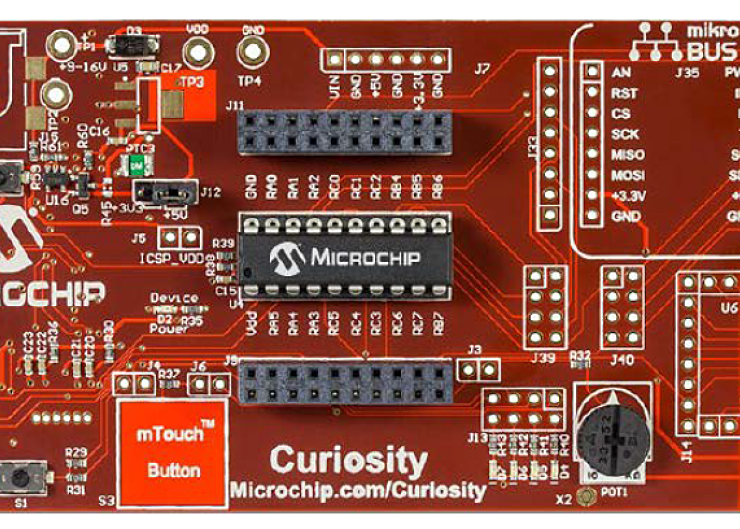
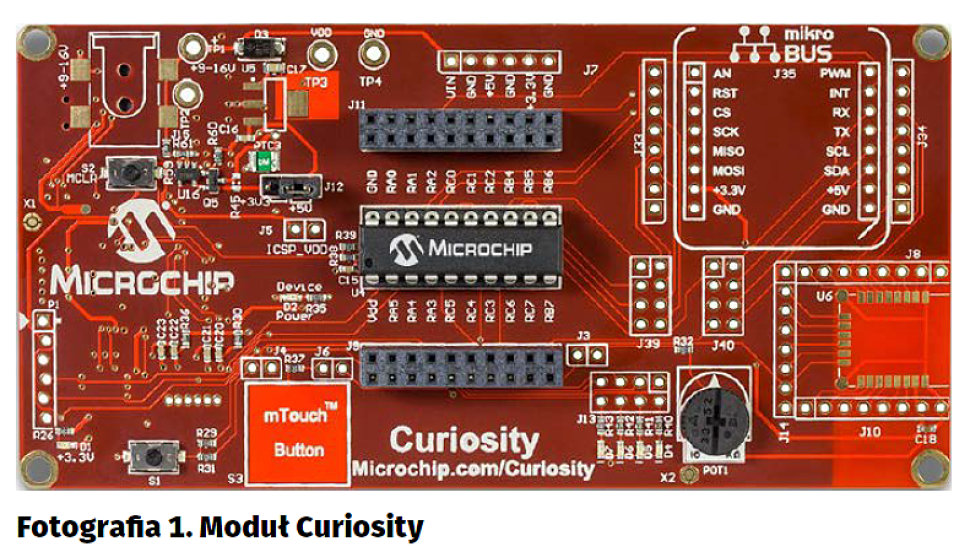
Przykłady konfigurowania modułów peryferyjnych będą testowane na module ewaluacyjnym Curiosity – fotografia 1. Ma on wbudowany programator/debugger współpracujący z driverami USB przeznaczonymi dla pakietu MPLAB Xpress. Zgodnie z założeniem producenta, jest to tani moduł przeznaczony do testowania mikrokontrolerów 8-bitowych w obudowach 8-, 14- i 20-wyprowadzeniowych DIP. Na płytce oprócz podstawki dla mikrokontrolera umieszczono „przycisk” do testowania funkcji interfejsu dotykowego mTouch, potencjometr do testowania przetwornika A/C i przycisk S1. Wyprowadzenia mikrokontrolera są doprowadzone do gniazd IDC20. Żeby moduł był bardziej uniwersalny, można do niego dołączać moduły zewnętrzne, produkowane przez firmę MikroElektronika (mikro BUS) oraz moduł Bluetooth RN4020. Płytka jest zasilana poprzez złącze USB, ale opcjonalnie można ją zasilić z zewnętrznego zasilacza o napięciu 9…16 V. Wymaga to wlutowania współosiowego gniazda zasilającego i stabilizatora +5 V. Moduł, który otrzymałem dzięki uprzejmości polskiego oddziału Microchipa, wyposażono w mikrokontroler PIC16F1619.
Jak w wielu podobnych środowiskach projektowych IDE, efekty pracy nad programową aplikacją są zapisywane w postaci projektu. Ma on swoją unikalna nazwę i zawiera – oprócz wszystkich niezbędnych plików źródłowych – pliki makefile, skrypty linkera oraz pliki zawierające ustawienia na przykład kompilatora, ale też ustawienia i konfiguracje plug-inów – u nas będą to ustawienia wtyczki MCC.
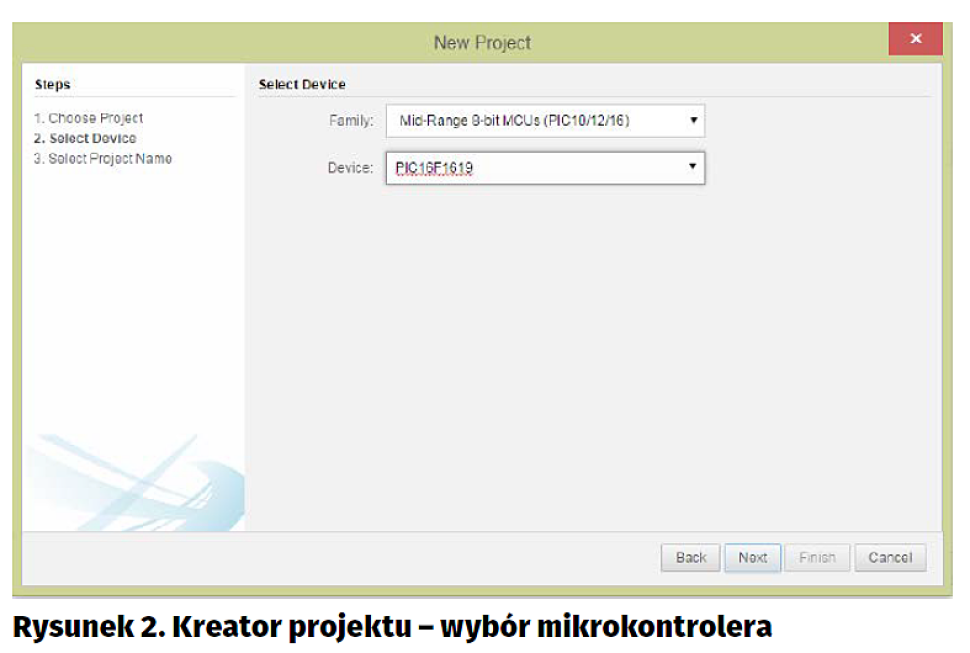
Kreator nowego projektu jest wywoływany z menu File New Project. W pierwszym oknie jest wybierana kategoria Microchip Embeded i projekt Standalone Project (tylko ta opcja jest dostępna dla Xpress). W kolejnym kroku trzeba wybrać typ mikrokontrolera (rysunek 2). W ostatnim, trzecim oknie nadajemy nazwę projektu i kreator kończy działanie. Nazwa projektu i logiczne katalogi Header Files oraz Source Files są wyświetlane w oknie Project. Z projektem jest też związane okno DashBoard wyświetlające:
- Wybrany kompilator.
- Narzędzie do programowania/debugowania.
- Ustawienia debuggera: punkty zatrzymań (breakpoint) w kodzie programu.
W tym momencie projekt jest skonfigurowany domyślnie: mikrokontroler wybrany przez kreatora projektu i ostatnio używana lub najnowsza wersja kompilatora.
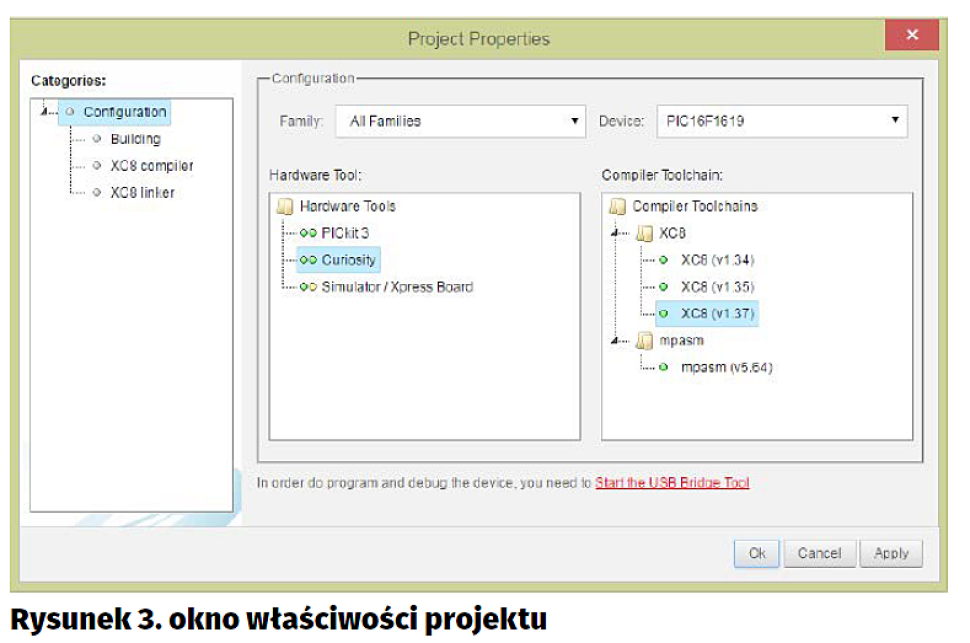
Ustawienia projektu są wykonywane w oknie Project Properties. To okno można wywołać na dwa sposoby. Pierwszy to kliknięcie prawym przyciskiem myszy na nazwę projektu w oknie Project, a drugi to kliknięcie na ikonkę w oknie Dashboard. Okno właściwości projektu pokazano na rysunku 3.
W zakładce Configuration można zmienić typ mikrokontrolera, wybrać z listy dostępny programator/debugger oraz jedną z dostępnych wersji kompilatora MPLAB XC8. Ustawienia dostępne w oknach Building, XC Compiler i XC8 linker można pozostawić domyślne.
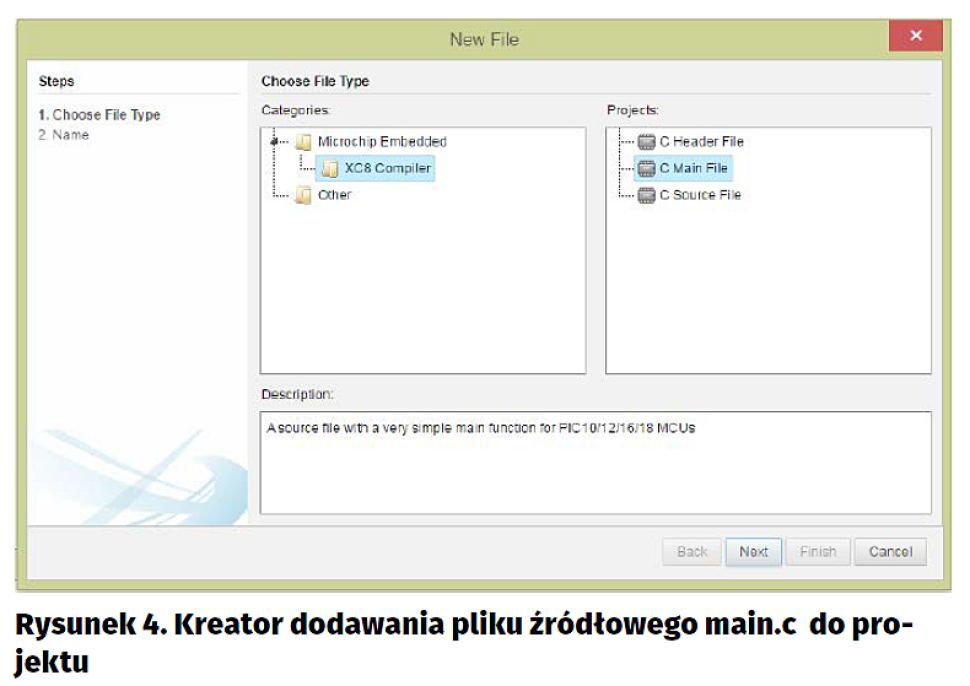
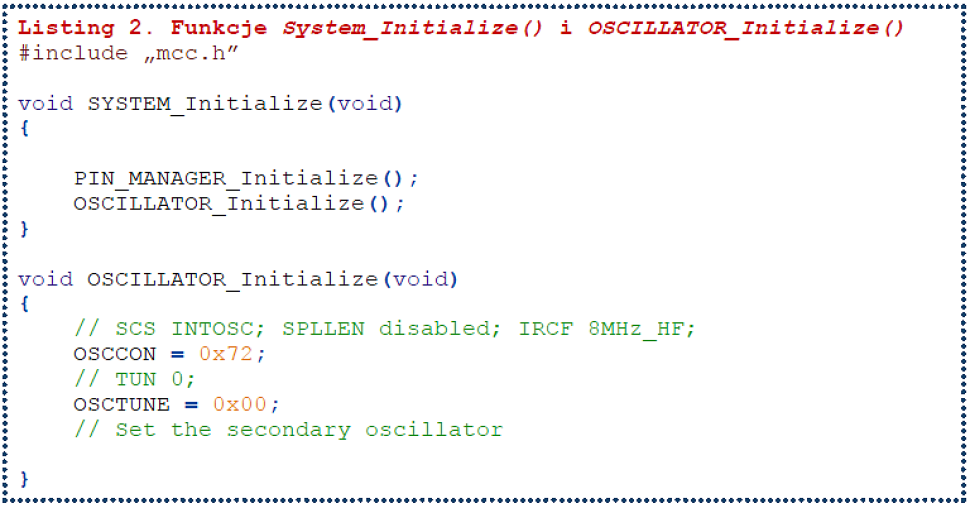
Drugi sposób to wygenerowanie pliku z funkcja main() przez wtyczkę MCC. Jeżeli MCC nie znajdzie pliku z funkcją main() w trakcie generowania plików konfiguracyjnych, to automatycznie go wygeneruje. Ta druga opcja jest wygodniejsza, bo MCC umieszcza w funkcji main() wywołanie funkcji SYSTEM_Initialize() z odpowiednim plikiem nagłówkowym (listing 2).
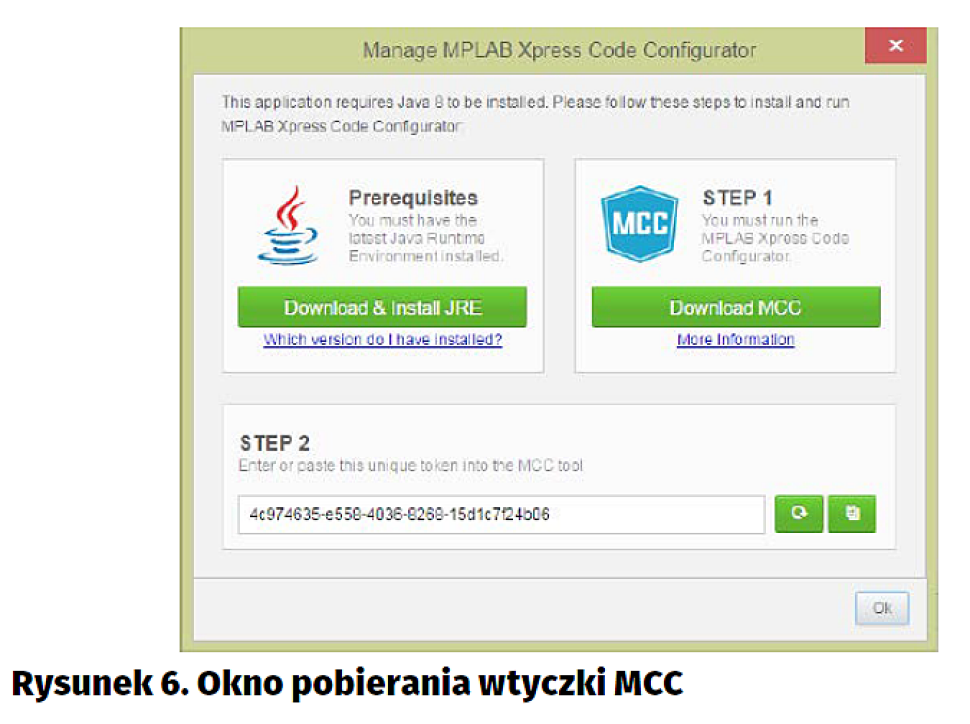
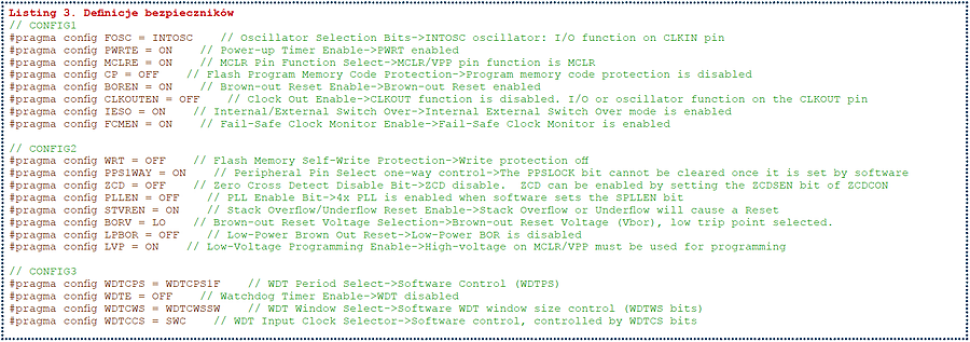
Każdy program napisany dla mikrokontrolera musi zawierać funkcje konfigurujące taktowanie, układ przerwań, jeżeli jest wykorzystywany i układy peryferyjne. Konfiguracja taktowania, włączenie/wyłączenie licznika watchdoga, włączenie/wyłączenie protekcji zapisu, układu kontroli napięcia zasilania (brown – out) itp. odbywa się przez programowanie bitów bezpieczników (fuse). Wszystkie czynności konfiguracyjne nawet dla prostych układów są czasochłonne i łatwo się przy tym pomylić. Dlatego coraz częściej do pakietów projektowych IDE są dołączane funkcje ułatwiające skonfigurowanie mikrokontrolera. W MPLAB IDE do tego celu jest przeznaczona wtyczka MCC (MPLAB Code Configurator). W MPLAB X IDE wtyczka jest ściągana z serwera Microchipa i instalowana. W przypadku MPLAB Xpress MCC jest to aplikacja w języku Java. Po kliknięciu na ikonkę MCC w pasku narzędzi jest wyświetlane okno (rysunek 6), w którym musimy w pierwszym kroku pobrać i zainstalować najnowszą wersję Java Runtime Enviroment. Potem pobieramy plik w MCC_Xpresss.jnlp. Wykonanie programu zawartego w tym pliku powoduje uruchomienie wtyczki MCC. Dla ułatwienia pracy można utworzyć skrót do MCC_Xpresss.jnlp.
|
|
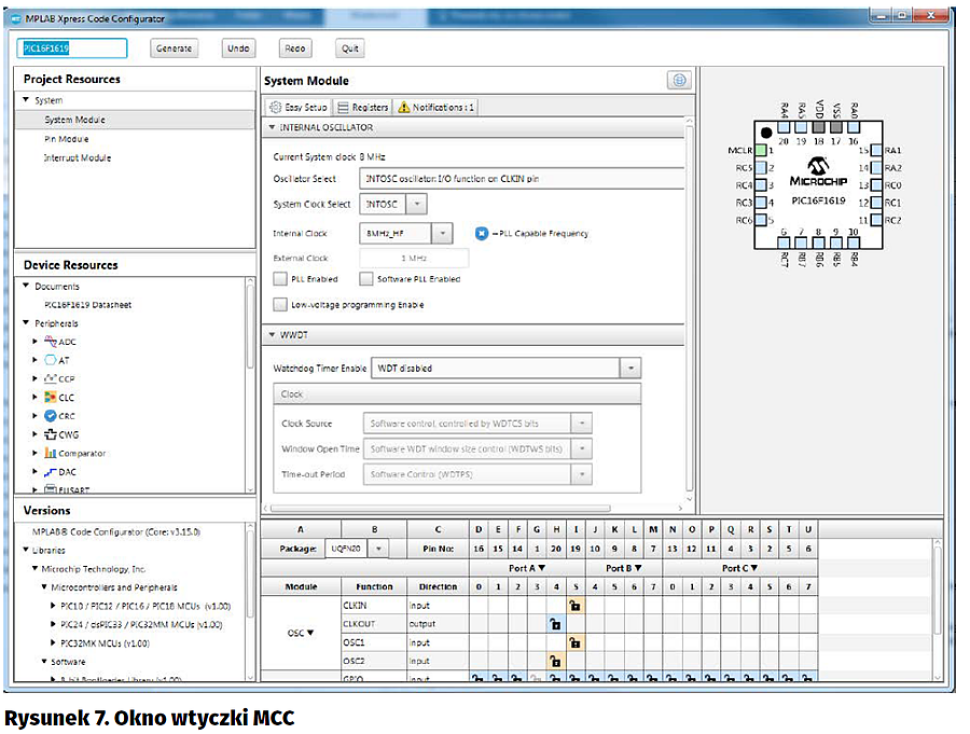
Takie rozwiązanie uruchamiania MCC w MPLAB Xpress nie jest w moim odczuciu zbyt przemyślane. Po pierwsze, musimy pobrać niewielki co prawda plik i zapisać go w komputerze. Kłóci się to trochę z ideą pracy w chmurze. Po drugie, kliknięcie na ikonę MCC w MPLB Xpress oznacza coś zupełnie innego (otwarcie okna pobierania wtyczki – rys. 6) niż w „stacjonarnym” MPLAB X (otwarcie wtyczki MCC). To trochę irytujące i być może zostanie później poprawione. Okno MCC pokazano na rysunku 7.
Konfigurowanie taktowania mikrokontrolera
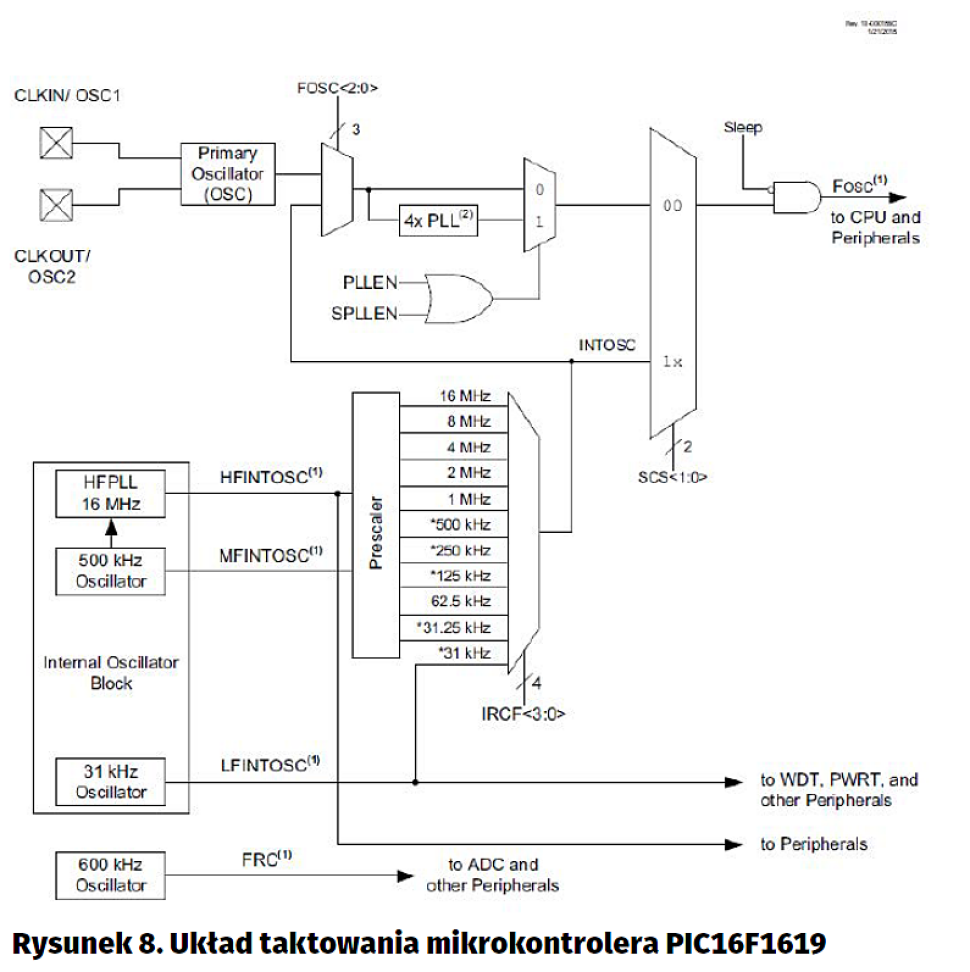
Na rysunku 8 pokazano schemat blokowy taktowania mikrokontrolera PIC16F1619. Taki sam lub bardzo podobny układ taktowania znajdziemy we wszystkich mikrokontrolerach rodziny PIC16F1xxx. Moduł taktowania zawiera kilka różnych źródeł sygnału zegarowego. Można te źródła podzielić na dwie zasadnicze części: zewnętrzne i wewnętrzne.
- ECL (External Clock Low-Power) do 500 kHz.
- ECM (External Clock Medium-Power) 500 kHz…4 MHz.
- ECH (External Clock HIGH-Power) 4 MHz…32 MHz.
Drugim zewnętrznym źródłem sygnału taktującego może być oscylator kwarcowy o częstotliwości 4…10 MHz – tryb pracy HS (High Gain Crystal Resonator). Oprócz źródeł zewnętrznych dostępne są też trzy oscylatory RC wbudowane w strukturę mikrokontrolera. Do taktowania rdzenia i peryferii jest wykorzystywany oscylator o częstotliwości 500 kHz powielonej w układzie PLL do 16 MHz. Oscylator 500 kHz jest kalibrowany w procesie produkcyjnym, ale użytkownik może dokonać poprawek jego częstotliwości, zapisując rejestr OSCTUNE. Potem częstotliwość z wyjścia układu PLL (16 MHz) można podzielić i uzyskać częstotliwości z zakresu 31,25 kHz…16 MHz, jak pokazano na rys. 8. Jeżeli taktowanie z częstotliwością 16 MHz (maksymalna częstotliwość taktowania to 32 MHz) i dokładność oscylatora RC są wystarczające, to wewnętrzny oscylator RC jest bardzo dobrym wyborem.
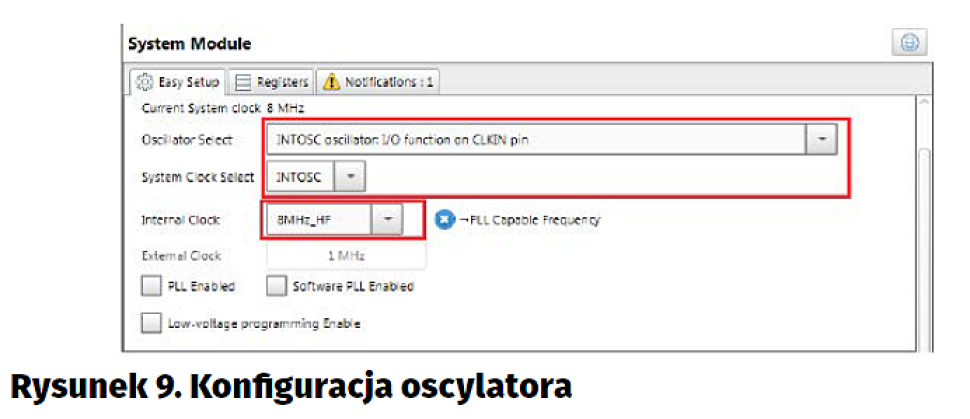
O tym, które źródło taktowania zostanie wybrane, decyduje rejestr OSCCON, a w zasadzie dwa najmłodsze bity SCS. Kiedy te bity są wyzerowane, to o tym, jak mikrokontroler jest taktowany, decydują bity FOSC<1:0> rejestru konfiguracyjnego (fuse). Dla SCS <1:0>=1x źródłem taktowania jest wewnętrzny oscylator RC. My w naszych przykładach będziemy używali wewnętrznego oscylatora RC o częstotliwości 8 MHz, skonfigurowanego za pomocą MCC.
Konfiguracja jest tak łatwa, jak to tylko możliwe. W oknie System Module wybieramy typ oscylatora Oscillator Select INTOSC Oscillator, a następnie System Clock Select INTOSC oraz Internal Clock 8MHz (rysunek 9). Po kliknięciu na przycisk Generate, MCC wygeneruje plik mcc.c zawierający:
- Funkcję System_Initialize(). Ta funkcja po każdej zmianie konfiguracji jest modyfikowana przez MCC i zawiera wywołanie funkcji konfiguracyjnych.
- Funkcję OSCILLATOR_Initialize(). Ta funkcja zapisuje rejestr OSCCON i zeruje rejestr OSCTUNE (listing 3).
- Definicję rejestrów konfiguracyjnych fuse.
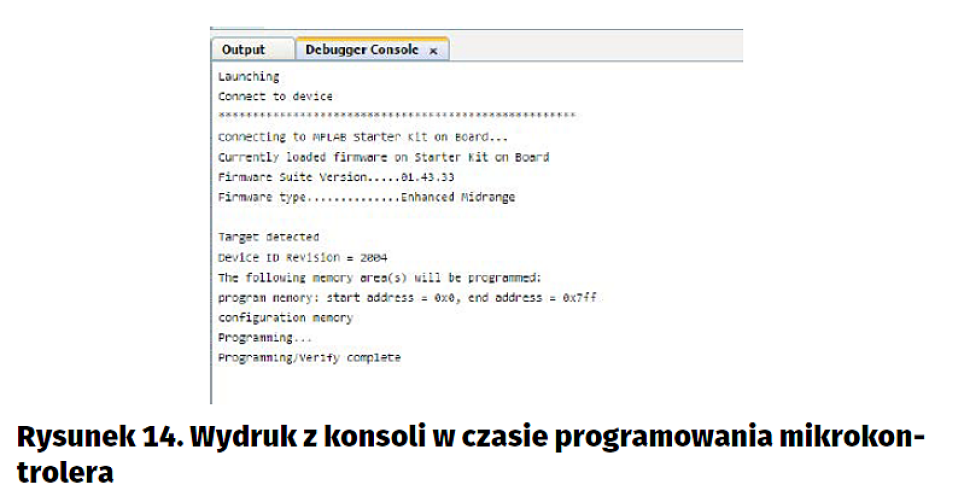
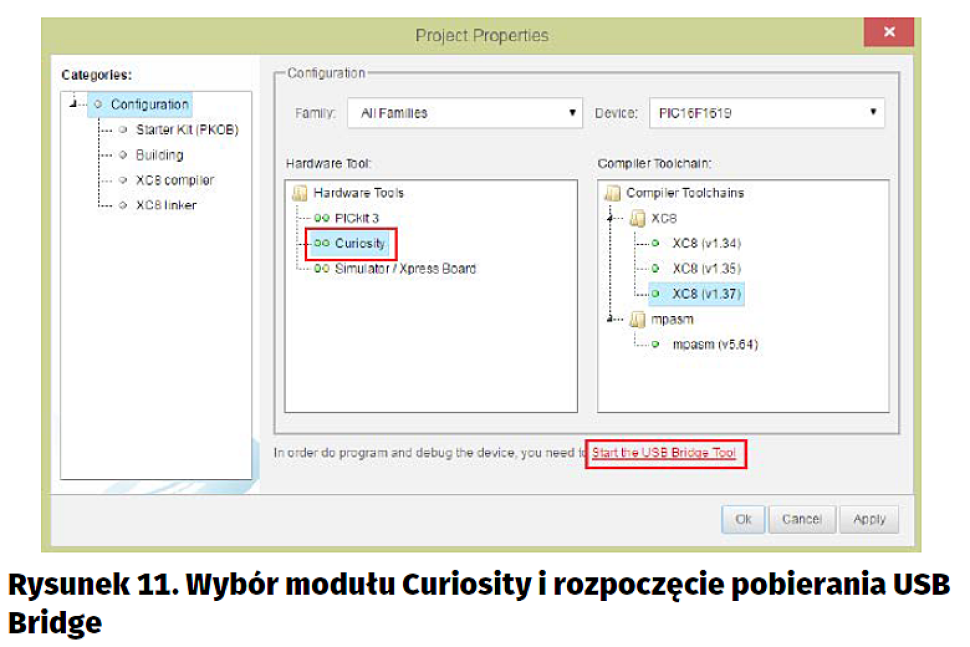
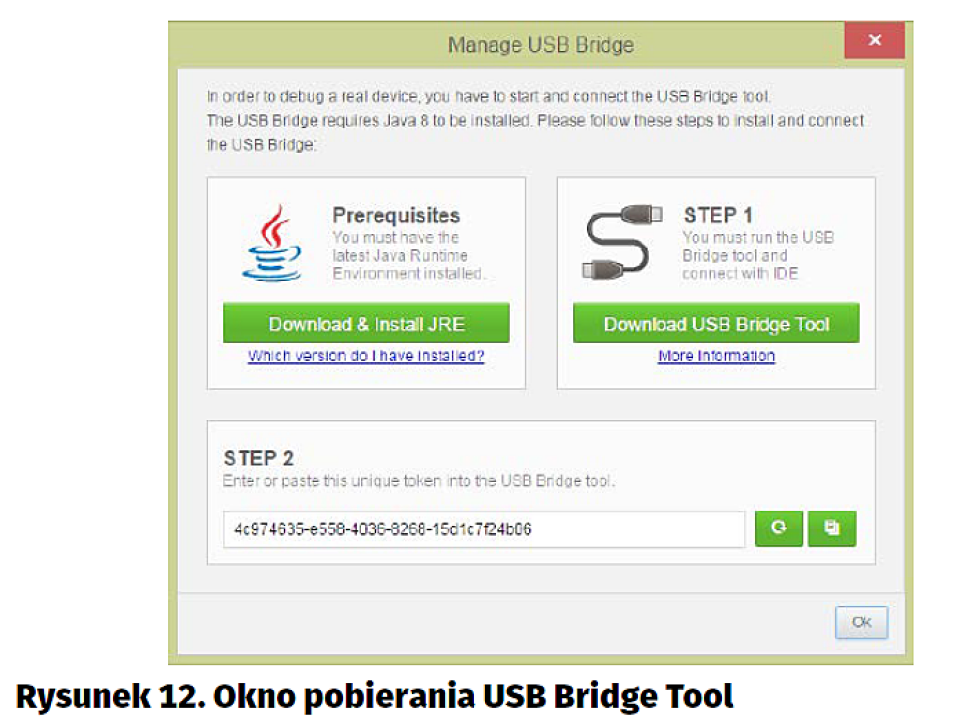
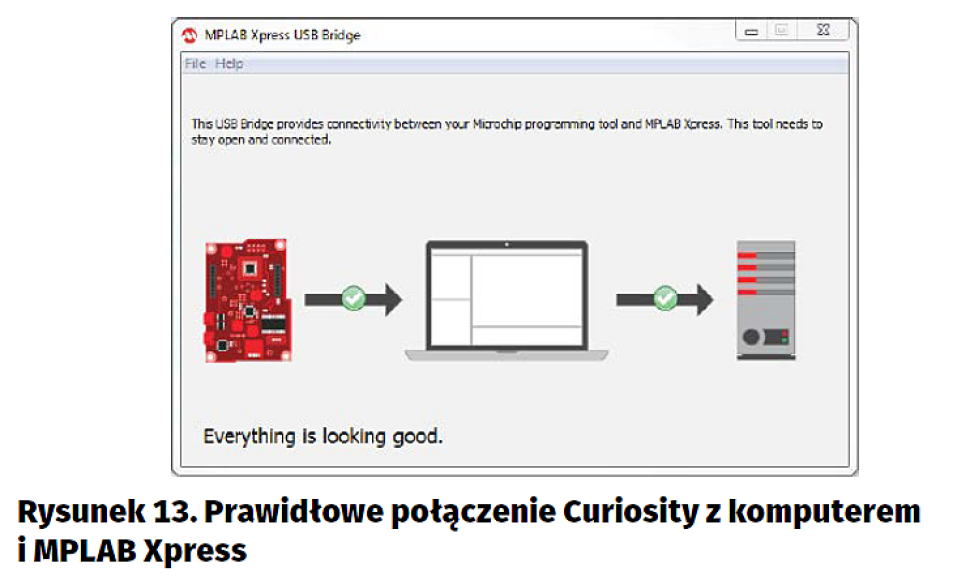
Żeby można było zaprogramować pamięć mikrokontrolera umieszczonego w podstawce modułu Curiosity, trzeba go połączyć z portem USB komputera, a następnie pobrać i uruchomić program USB Bridge. Proces jest podobny jak w przypadku wtyczki MCC. Otwieramy okno Project Properties, wybieramy Hardware Tools Curiosity i klikamy na Start the USB Bridge Tool (rysunek 11). Klikamy na Download Bridge Tool, pobieramy i zapisujemy plik USBBridge.jnlp. Po jego uruchomieniu, gdy moduł jest przyłączony do portu USB komputera, powinno być wyświetlone okno informujące, że wszystko zostało wykonane poprawnie (rysunek 13). Reasumując: aby zaprogramować układ umieszczony w module Curiosity, trzeba:
- Przy otwartym MPLAB Xpress uruchomić program USBBridge.jnlp.
- Jeżeli wszystko jest prawidłowo (rys. 13), to trzeba kliknąć na ikonkę .
Xpress wywoła kompilator XC-8, skompiluje program i jeżeli nie ma błędów, połączy się z programatorem/debuggerem z modułu Curiosity i zapisze pamięć programu i rejestry konfiguracyjne.
Oprócz programowania można użyć sprzętowego debuggera. Uruchamia się go po kliknięciu na ikonkę . Xpress kompiluje program z opcją DEBUG_RUN, łączy się z programatorem /debug-
gerem Curiosity i ładuje program do pamięci mikrokontrolera. Debuger dysponuje tylko jednym punktem zatrzymania break point. W czasie uruchamiania mamy do dyspozycji:
|
|
|
- Zatrzymanie debugowania (pause).
- Restart mikrokontrolera.
- Uruchomienie wykonywania programu.
- Wykonanie jednego kroku z wejściem do funkcji (step Into).
- Wykonanie jednego kroku bez debugowania wywoływanych funkcji (step over) .
Jak widać, sprzętowy debugger jest dość skromny, ale i tak pozwala na efektywne wykrywanie błędów w prostych programach.
Tomasz Jabłoński, EP