Zaloguj
Zaloguj





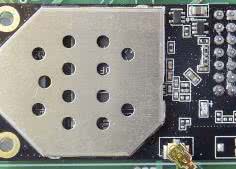
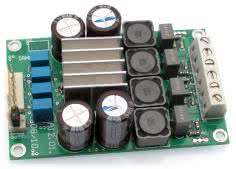
Fotografia 1. Czujnik ultradźwiękowy HC-SR04
Pokazany na fotografii 1 czujnik ultradźwiękowy HC-SR04 zawiera 8-bitowy mikrokontroler Elan EM78P153S oraz wzmacniacze sygnału akustycznego - wyjściowy i wejściowy. Wzmacniacz wyjściowy służy do wysterowania nadajnika ultradźwięków (miniaturowego głośnika). Ciekawostką jest, że do jego zbudowania użyto układu MAX232, znanego z zupełnie innych zastosowań. Wzmacniacz wejściowy (mikrofonowy) został zrealizowany przy użyciu układu LM324 lub podobnego poczwórnego wzmacniacza operacyjnego. Moduł wyposażony jest w jednorzędowe złącze 4-stykowe - wyprowadzenia modułu opisano w tabeli 1.
Poziomy wejściowe sygnałów są zgodne ze standardem logicznym TTL, dzięki czemu możliwa jest współpraca modułu z układami zasilanymi napięciem 5 V lub 3,3 V. Poziomem nieaktywnym obu sygnałów jest poziom niski. W celu wykonania pomiaru odległości należy na wejście Trig podać impuls o poziomie wysokim i czasie trwania nie krótszym od 10 ms. Mikrokontroler modułu emituje wtedy paczkę 8 impulsów ultradźwiękowych o częstotliwości 40 kHz i ustawia linię Echo. Jest ona zerowana po odebraniu przez mikrokontroler modułu HC-SR04 dźwięku odbitego od przeszkody. Czas trwania stanu wysokiego na linii Echo określa czas przemieszczania się dźwięku z modułu do przeszkody i z powrotem. Mierząc ten czas, możemy określić odległość pomiędzy czujnikiem i przeszkodą; przy założeniu, że prędkość dźwięku wynosi około 340 m/s, odległość od przeszkody możemy wyznaczyć z wzoru:
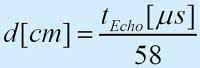
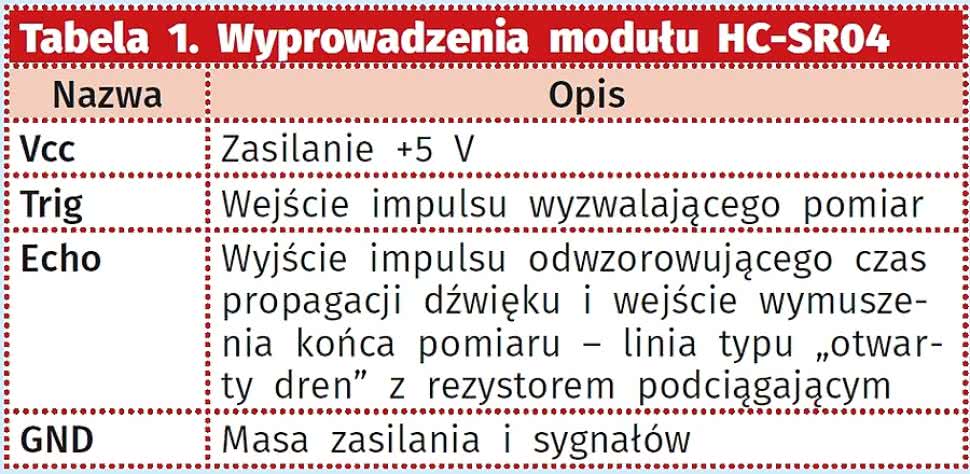
Tabela 1. Wyprowadzenia modułu HC-SR04
Jeżeli moduł nie zarejestruje odbitego dźwięku, linia Echo pozostaje ustawiona i moduł przestaje reagować na kolejne impulsy na linii Trig. W celu ponownego uaktywnienia modułu należy wymusić poziom niski na linii Echo. Ta ważna informacja jest często pomijana w opisach działania modułu.
W praktyce zasięg czujnika odległości nie przekracza 3...5 metrów. Typowo używamy go do pomiaru odległości w zakresie od kilku centymetrów do 2 metrów. Minimalna odległość mierzona wynika z geometrii samego czujnika i wynosi około 2 cm.
Współpraca czujnika z mikrokontrolerem
Typowy scenariusz użycia czujnika odległości zakłada wykonywanie pomiarów odległości ze stałą częstotliwością wynoszącą od 1 do 20 Hz. W celu wykonania pomiaru należy wygenerować impuls na wejściu Trig czujnika i zmierzyć czas trwania impulsu na wyjściu Echo. Aby zagwarantować zakończenie pomiaru, należy również zapewnić kasowanie impulsu na wyjściu Trig poprzez wymuszenie stanu niskiego na linii Trig przy użyciu wyjścia z otwartym drenem. Z doświadczeń wynika, że czas trwania impulsu kasującego powinien wynosić nie mniej niż 30 ms. Oba impulsy - wyzwalający pomiar i kasujący - mogą być wytwarzane przez dwa wyjścia tego samego timera pracującego w trybie PWM. Do pomiaru czasu trwania impulsu na wyjściu Echo należy użyć kanału timera pracującego w trybie capture, zaprogramowanego na pomiar czasu trwania impulsu lub na chwytanie obu zboczy sygnału wejściowego.
Mikrokontrolery STM32 są wyposażone w timery 4-kanałowe, których poszczególne kanały mogą pracować w różnych trybach. Dzięki temu do obsługi czujnika odległości można użyć jednego timera. Co więcej, pojedyncza linia timera może być równocześnie używana w roli wyjścia PWM i wejście Capture, co umożliwia przyłączenie czujnika przy użyciu tylko dwóch wyprowadzeń mikrokontrolera. Do obsługi HC-SR04 można użyć dowolnego z 4-kanałowych timerów TIM1…TIM5. Jedna para kanałów (CH1-CH2 albo CH3-CH4) służy do współpracy z linią Echo. Jeden kanał z drugiej pary jest używany do generowania impulsu wyzwalającego na linii Trig.
Opisany dalej przykład zrealizowano na płytce STM32 Nucleo z mikrokontrolerem STM32F411. Może on zostać łatwo zaadaptowany poprzez modyfikację kodu inicjującego peryferie dla dowolnego mikrokontrolera rodziny STM32F i dowolnego timera 4-kanałowego.
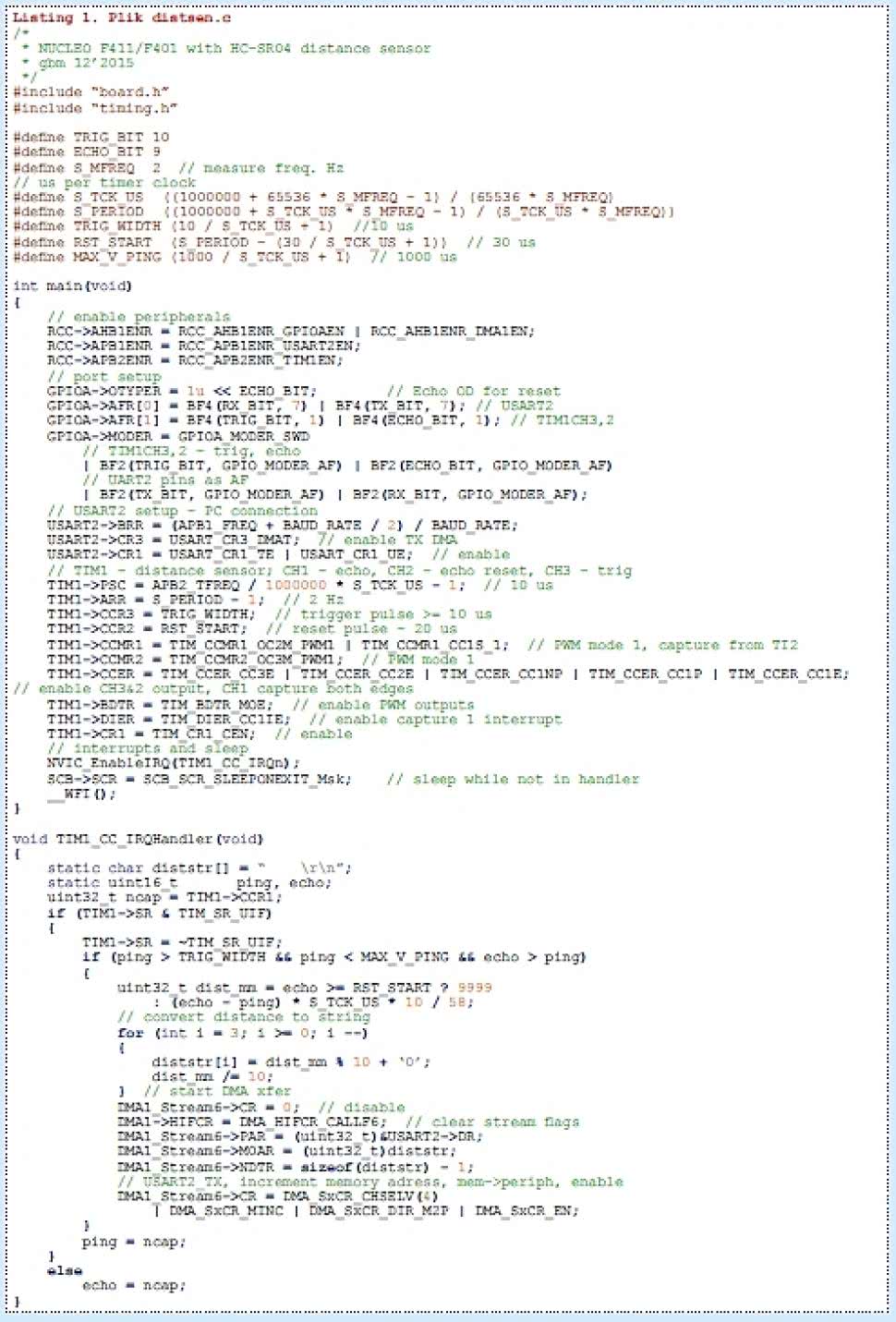
Listing 1. Plik distsen.c
Program przykładowy
Program demonstracyjny wykonuje pomiary odległości ze stałą częstotliwością i przesyła ich wyniki przez port szeregowy. Działa on na płytce Nucleo-F411RE, wyposażonej w interfejs ST-Link/V2-1. Interfejs USART2 mikrokontrolera jest połączony na płytce Nucleo z interfejsem VCOM ST-Link, który jest widoczny w komputerze jako wirtualny port szeregowy. Wyniki pomiarów mogą być na bieżąco wyświetlane na terminalu uruchomionym na PC. Do obsługi portu szeregowego użyto modułu bezpośredniego dostępu do pamięci. Oprogramowanie zostało zrealizowane w strukturze bez pętli zdarzeń. Wszystkie czynności związane z pomiarem odległości są wykonywane w przerwaniu timera.
Projekt wykonano w środowisku Keil MDK-ARM v.5.17. Program główny pokazano na listingu 1, a cały folder projektu jest dostępny w pliku stm32_HC-SR04.zip.
Użycie timera
Do obsługi czujnika użyto timera TIM1. Okres timera określa okres wykonywania pomiarów. Wejście Trig czujnika jest sterowane z wyjścia CH3 pracującego w trybie PWM. Linia Echo jest połączona z linią timera CH2, która pracuje jako wyjście PWM (z otwartym drenem) i jednocześnie jako wejście dla kanału 1, działającego w trybie chwytania obu zboczy sygnału. Jedynym źródłem przerwań jest kanał 1 timera.

Tabela 2. Dołączenie czujnika HC-SR04 do płytki Nucleo
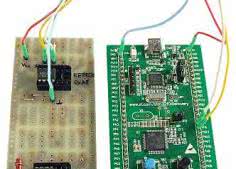
Podłączenie czujnika HC-SR04
Czujnik połączono z płytką Nucleo za pomocą 4 przewodów, zgodnie z tabelą 2.
Inicjowanie mikrokontrolera
Ponieważ w przykładowym programie nie mamy istotnego zapotrzebowania na moc obliczeniową, mikrokontroler STM32F411 pracuje z domyślnym źródłem taktowania - wewnętrznym generatorem RC o częstotliwości 16 MHz. Z taką też częstotliwością działają wszystkie jego peryferie. Częstotliwości taktowania poszczególnych bloków zostały zdefiniowane jako stałe w pliku nagłówkowym timing.h. Na wstępie sekwencji inicjującej następuje włączenie używanych w programie peryferiali - portu GPIOA, timera TIM1, interfejsu USART2 i sterownika bezpośredniego dostępu do pamięci DMA1. Programowanie portu GPIOA polega na ustawieniu trybu OD dla linii PA9, służącej jako wejście i wyjście sygnału Echo oraz na wybraniu odpowiednich funkcji AF dla linii interfejsu czujnika i USART2 (linie PA2, 3, 9, 10). Interfejs szeregowy USART2 zostaje zaprogramowany na szybkość 115200 b/s i transmisję z użyciem DMA.
Programowanie timera
Stałe czasowe potrzebne do zaprogramowania timera TIM1 zostały zdefiniowane na początku pliku distsen.c.
Są to kolejno:
- S_MFREQ - częstotliwość, z którą są wykonywane kolejne pomiary odległości - zadawana przez programistę.
- S_TSC_US - okres zegara timera za preskalerem wyrażony w ms, wyliczony automatycznie, aby okres timera nie przekraczał 65536 cykli.
- S_PERIOD - okres timera wyrażony w cyklach, wyliczony automatycznie.
- TRIG_WIDTH - szerokość impulsu wyzwalającego pomiar - musi być ona nie mniejsza niż 10 ms.
- RST_START - czas od początku impulsu Trig do początku impulsu kasowania pomiaru na linii Echo, którego szerokość jest nie mniejsza od 30 ms; impuls kasowania kończy się wraz z końcem okresu timera.
- MAX_V_PING - maksymalny czas od początku impulsu Trig do początku impulsu Echo, przy którym pomiar może zostać uznany za ważny - służy on do odrzucenia nieregularnych odpowiedzi modułu HC-SR04 bezpośrednio po włączeniu zasilania układu; z doświadczeń wynika, że właściwą wartością jest tu 1000 ms.
Podczas programowania timera kolejno:
- Programujemy nastawy preskalera - rejestr PSC.
- Programujemy okres pomiarów - rejestr ARR.
- Programujemy czasy impulsów wyzwalania i kasowania pomiaru - rejestry CCR3 i CCR2.
- Ustawiamy tryb PWM dla kanału kasowania (CH2) i tryb capture z wejścia TI2 (będącego równocześnie wyjściem kanału CH2) dla kanału CH1 - rejestr CCMR1.
- Włączamy tryb PWM dla kanału wyzwalania pomiaru (CH3) - rejestr CCMR2.
- Włączamy wyjścia PWM dla kanałów CH3 i CH2 oraz programujemy tryb chwytania obu zboczy dla wejścia sygnału Echo - rejestr CCER.
- Włączamy globalnie wyjścia PWM - bit MOE w rejestrze BDTR. • Włączamy przerwania od przechwycenia w kanale CH1.
- Włączamy timer.
Po zaprogramowaniu timera włączamy przerwanie timera, włączamy w procesorze tryb uśpienia przy wyjściu z obsługi wyjątku, a następnie usypiamy procesor.
Procedura obsługi przerwania timera
Procedura obsługi przerwania timera jest wywoływana dwukrotnie w każdym okresie pomiaru, przy wykryciu każdej zmiany stanu linii Echo. Pierwsza zmiana w okresie pomiarowym, z 0 na 1, następuje wraz z ustawieniem stanu aktywnego na linii Echo przez moduł HC-SR04. Druga zmiana - z 1 na 0 następuje w wyniku odebrania echa przez moduł HC-SR04 lub z powodu wygenerowania na linii Echo impulsu kasującego przez mikrokontroler.
Oprogramowanie nie bada stanu linii Echo. Przyjmujemy, że pierwsza zmiana stanu w cyklu pomiarowym jest zmianą z 0 na 1, a druga - z 1 na 0. Jako znacznik początku okresu jest używany znacznik przeładowania timera - bit UIF w rejestrze SR. Znacznik przerwania od zmiany stanu linii jest zerowany automatycznie z chwilą odczytu rejestru CCR1.
Programowa reakcja na wystąpienie pierwszej zmiany stanu linii Echo w okresie pomiarowym składa się z:
- Wyzerowania znacznika początku okresu pomiarowego.
- Weryfikacji poprawności pomiaru z poprzedniego okresu, wyliczenia odległości i rozpoczęcia transmisji danych przez USART.
- Zapamiętania czasu zmiany w zmiennej ping.
Przy drugiej zmianie stanu linii Echo w okresie pomiarowym czas zmiany jest zapamiętywany w zmiennej echo.
Bezpośrednio po włączeniu urządzenia, w jednym lub dwóch cyklach pomiarowych, mogą wystąpić anomalie w pracy czujnika. Poprawny cykl pomiarowy jest rozpoznawany po tym, że początek impulsu Echo występuje nie wcześniej niż po zakończeniu impulsu Trig i nie później niż 1 ms od początku cyklu pomiarowego (początku impulsu Trig), a druga zmiana stanu linii Echo jest rejestrowana z czasem późniejszym niż pierwsza (czyli pochodzi z obecnego, a nie z poprzedniego cyklu pomiarowego). Odległość czujnika od przeszkody jest obliczana wyłącznie po zweryfikowaniu poprawności danych.
Obliczenie odległości od przeszkody następuje na podstawie wartości zmiennych ping i echo. Ponieważ rozdzielczość czujnika jest lepsza od 1 cm, przyjęto, że jednostką odległości jest milimetr. Jeżeli zarejestrowany czas drugiej zmiany odpowiada początkowi impulsu kasującego, przyjmowana jest umowna odległość maksymalna (9999 mm), wykraczająca poza rzeczywisty zasięg czujnika. W przeciwnym razie odległość jest wyliczana na podstawie zarejestrowanej długości impulsu na linii Echo - różnicy wartości zmiennych echo i ping.
Po wyznaczeniu odległości w procedurze obsługi przerwania timera następuje konwersja odległości na 4-cyfrową postać tekstową. Następnie jest programowany sterownik DMA w celu przesłania łańcucha tekstowego zawierającego zmierzoną odległość przez moduł USART2, połączony z interfejsem VCOM ST-Link. Przesyłany tekst można obserwować na terminalu w komputerze PC.
Grzegorz Mazur