Zaloguj
Zaloguj



Impulsowy stabilizator napięcia to układ lub moduł (rzadziej pojedynczy element), który stabilizuje napięcie wyjściowe za pomocą przetwornicy impulsowej DC/DC. Przetwornica taka zwana jest czasami przekształtnikiem lub konwerterem napięcia. To ogólny termin określający rodzinę systemów elektronicznych, pozwalających na zmianę jednego napięcia stałego na inne, zazwyczaj zbudowanych z użyciem elementów indukcyjnych i układów impulsowych. Stabilizatory impulsowe zawierają zazwyczaj pętle sprzężenia zwrotnego - podobnie jak stabilizatory liniowe - do stabilizacji napięcia wyjściowego, z tą różnicą że sygnał błędu w stabilizatorze impulsowym reguluje pracę przetwornicy. Dzięki temu układ zachowuje cały czas wysoką sprawność działania.
Architektury stabilizatorów impulsowych i ich aplikacje
Na rynku dostępnych jest wiele przetwornic i stabilizatorów impulsowych. W poniższym artykule omówimy cztery najpopularniejsze topologie tego rodzaju układów:
- Buck: topologia stosowana do redukcji napięcia - Uwej > Uwyj;
- Boost: tego rodzaju przetwornica zapewnia napięcie wyjściowe wyższe niż napięcie wejściowe - Uwej < Uwyj;
- Buck-Boost: to popularny układ inwertera, tj. systemu, który dostarcza napięcie wyjściowe o przeciwnej polaryzacji względem wejścia. Co do wartości bezwzględnej napięcia wyjściowego może ono być tak większe, jak i mniejsze od wejściowej;
- Flyback: w stabilizatorze o takiej topologii napięcie wyjściowe może być mniejsze lub większe niż napięcie wejściowe; możliwe jest także stabilizowanie wielu napięć wyjściowych z zastosowaniem jednego kontrolera przetwornicy Flyback.
Informacje dotyczące aplikacji zostaną zaprezentowane wraz z przykładami obwodów, które ilustrują niektóre zastosowania regulatorów o topologii Buck, Boost i Flyback. Omówimy także cechy szczególne, na które trzeba zwrócić uwagę, implementując stabilizator danego rodzaju w naszym systemie.
Podstawy działania stabilizatorów impulsowych
Przed rozpoczęciem objaśniania teoretycznych podstaw działania przetwornic musimy zapoznać się z dwoma zasadniczymi elementami, jakie występują w opisywanych przetwornicach. Są to cewka oraz transformator, elementy używane do konwersji napięcia.
Przyjrzyjmy się im bliżej. W dalszej części omówiona zostanie także modulacja wypełnienia impulsów (PWM), często stosowana w przetwornicach impulsowych do regulacji działania.
Indukcyjność - cewka
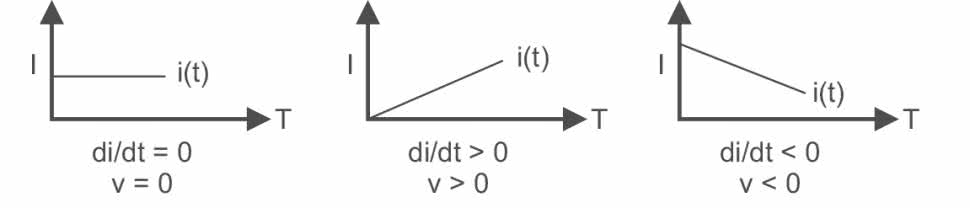
Jeśli do cewki indukcyjnej przyłożone zostanie jakieś napięcie, przez element ten przepłynie prąd (zmieniający się w czasie). Prąd będzie się zmieniał, nawet jeśli przyłożone zostanie stałe napięcie. Analogicznie, jeśli przez cewkę płynąć będzie prąd zmienny, to napięcie na cewce będzie się zmieniało. Równanie 1 opisuje związek napięcia na indukcyjności z prądem, jaki przez nią płynie.
U=L·dI/dt (1)
gdzie U to napięcie na cewce, L to indukcyjność cewki, I to prąd, a t to czas.
Z równania 1 można wyciągnąć dwa kluczowe wnioski:
- Napięcie indukowane na cewce wynika tylko ze zmienności prądu. Przepływ prądu stałego nie powoduje spadku napięcia (z pominięciem spadku napięcia na rezystancji stałoprądowej cewki, wynikającej z rezystancji przewodnika, z którego wykonano uzwojenie);
- Prąd przepływający przez cewkę indukcyjną nie może natychmiast zmienić wartości (w zerowym czasie), ponieważ wymagałoby to nieskończonego napięcia wymuszenia. Jednakże im szybciej zmienia się prąd, tym większe będzie uzyskane napięcie.
Zasady działania indukcyjności ilustruje rysunek 1, na którym przedstawiono również kilka przykładowych sytuacji dla różnych zależności prądu od czasu. Dla cewki najważniejszym parametrem jest pochodna prądu I w czasie t - dI/dt, która jest po prostu miarą tego, jak napięcie zmienia się z czasem. Kiedy prąd wykreślimy w funkcji czasu, wartość dI/dt w dowolnym fragmencie przebiegu jest definiowana jako nachylenie wykresu w danym punkcie czasu. Wykres po lewej stronie rysunku 1 pokazuje, że prąd stały ma wartość dI/dt równą zero, co nie powoduje spadku napięcia na cewce. Środkowy wykres pokazuje prąd, który rośnie z czasem - dI/dt ma wartość dodatnią, co skutkuje dodatnim spadkiem napięcia na cewce. Prąd, który maleje z czasem (pokazany na wykresie po prawej stronie rysunku 1), daje ujemny spadek napięcia, ponieważ wartość dI/dt jest ujemna.
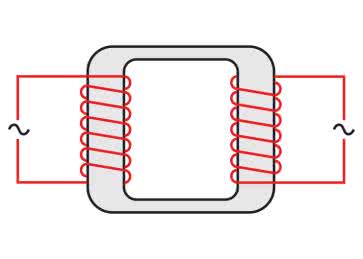
Transformator
Urządzenie, w którym co najmniej dwie cewki połączone są ze sobą wspólnym rdzeniem magnetycznym, to transformator. Podstawy działania tego rodzaju elementu pokazano na rysunku 2. Działanie transformatora można łatwo opisać - napięcie zmienne w czasie na jednym uzwojeniu powoduje indukowanie napięcia (zmiennego) na pozostałych uzwojeniach. Stosunek napięć na obu uzwojeniach jest określony stosunkiem liczby zwojów w obu uzwojeniach. Transformator nie dodaje mocy, która jest taka sama po obu stronach (na obu uzwojeniach). Uzwojenie z większą liczbą zwojów ma wyższe napięcie, ale mniejszy prąd, podczas gdy uzwojenie z mniejszą liczbą zwojów ma niższe napięcie, ale wyższy prąd.
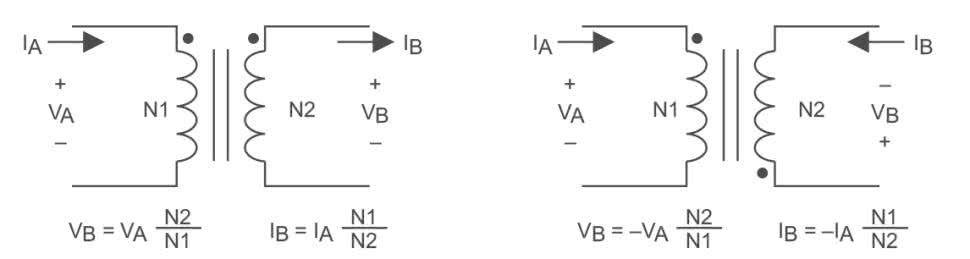
Kropka na uzwojeniu transformatora identyfikuje jego polaryzację względem drugiego uzwojenia i odwrócenie go względem kropki powoduje odwrócenie polaryzacji napięcia na drugim uzwojeniu.
Doskonały przykład działania transformatora można znaleźć pod maską samochodu, w którym transformator zastosowano do generowania wysokiego napięcia dla świec zapłonowych, co pokazano na rysunku 3. „Cewka” używana do generowania napięcia iskry jest w rzeczywistości transformatorem o bardzo dużej mocy i wysokim stosunkiem liczby uzwojeń wtórnych do pierwotnych. Gdy zaznaczony na schemacie na rysunku 3 przełącznik zamyka się, prąd zaczyna płynąć w uzwojeniu pierwotnym. Przepływ prądu ograniczony jest rezystorem R, włączonym w szereg z uzwojeniem pierwotnym transformatora. Gdy prąd ma wartość stałą, oznacza to brak napięcia na uzwojeniach. Kiedy przełącznik otwiera się, prąd w uzwojeniu pierwotnym bardzo szybko zanika, powodując pojawienie się dużego napięcia na tym uzwojeniu. Uzwojenie pierwotne jest magnetycznie sprzężone z uzwojeniem wtórnym - z uwagi na ogromny stosunek liczby zwojów uzwojenia wtórnego do pierwotnego, na wtórnym uzwojeniu indukuje się napięcie rzędu 30...40 kV.
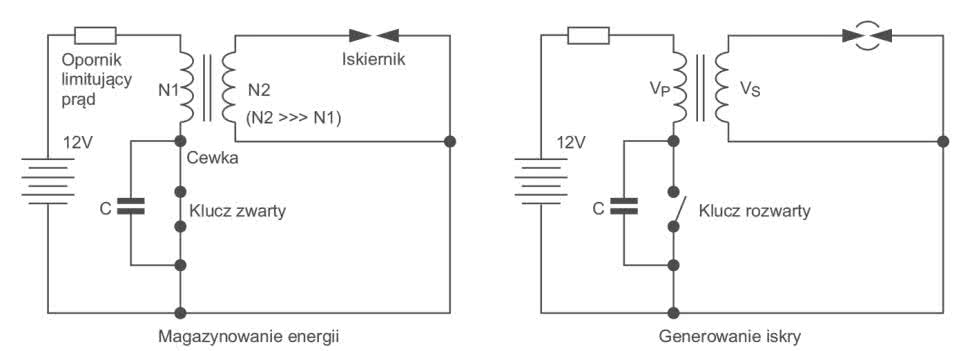
Jak wyjaśniono wcześniej, nie jest możliwe natychmiastowe przerwanie przepływu prądu w cewce (ponieważ wymagane byłoby nieskończone napięcie wymuszające). Z tego powodu w obwodach przełączających obciążenia indukcyjne występuje iskrzenie na stykach przełączników - kiedy przełącznik zaczyna się otwierać, generowane jest wysokie napięcie i powstaje łuk elektryczny w szczelinie powietrznej, powodujący przepływ prądu. To sprawia, że efektywnie prąd nie zatrzymuje się natychmiast. Umieszczenie kondensatora równolegle ze stykami przełącznika pomaga zmniejszyć efekt wyładowań łukowych. Na rysunku 3 widać ten kondensator, wpięty równolegle z przełącznikiem, co ma zapobiec jego uszkodzeniu i wydłużyć żywotność tego elementu.
Modulacja PWM
Wszystkie przetwornice impulsowe omówione w artykule bazują na regulacji napięcia z zastosowaniem modulacji szerokości impulsu (PWM). Sprzężenie zwrotne steruje napięciem wyjściowym, zmieniając czas włączenia elementu przełączającego (tzw. klucza) w przetwornicy. Aby zrozumieć, jak działa PWM, przeanalizujemy wynik zastosowania serii impulsów prostokątnych na filtrze LC.
W układzie z rysunku 4 szereg impulsów fali prostokątnej jest filtrowany i zapewnia stałe napięcie wyjściowe, które jest równe w przybliżeniu szczytowej amplitudzie impulsu pomnożonej przez wypełnienie przebiegu (wypełnienie jest definiowane jako czas włączenia podzielony przez całkowity okres impulsu). Zależność ta wyjaśnia, w jaki sposób można bezpośrednio kontrolować napięcie wyjściowe zmianą czasu włączenia klucza.

Topologie stabilizatorów impulsowych
W poniższej części zaprezentowane są najczęściej używane obwody przetwornic DC/DC stosowane w stabilizatorach impulsowych.
Buck
Jedna z najczęściej stosowanych topologii przetwornic impulsowych. Służy do obniżenia napięcia przy zachowaniu tej samej polaryzacji. Jest niezbędna w systemach o stosunkowo dużym napięciu zasilającym (np. 24 V czy 48 V) oraz w rozproszonych stabilizatorach, które muszą lokalnie generować napięcia takie jak 15 V, 12 V czy 5 V z bardzo wysoką sprawnością.
Konwerter Buck zawiera przełącznik w postaci tranzystora (najczęściej tranzystor typu MOSFET), który naprzemiennie załącza i wyłącza napięcie wejściowe do cewki indukcyjnej (rysunek 5). Dolne wykresy na rysunku 5 obrazują bieżące ścieżki przepływu prądu w układzie (pokazane jako pogrubione linie), gdy klucz jest włączony i wyłączony. Po załączeniu klucza napięcie wejściowe jest podłączone do cewki indukcyjnej. Różnica napięć między wejściem i wyjściem wymusza przepływ prądu przez cewkę indukcyjną L. W czasie załączenia klucza prąd płynie przez indukcyjność, płynąc do obciążenia i kondensatora wyjściowego C, ładując go. Gdy klucz jest wyłączony, napięcie wejściowe przyłożone do cewki indukcyjnej zostaje odcięte. Ponieważ prąd cewki nie może zmienić się natychmiast, napięcie na tym elemencie musi dostosować się do prądu.
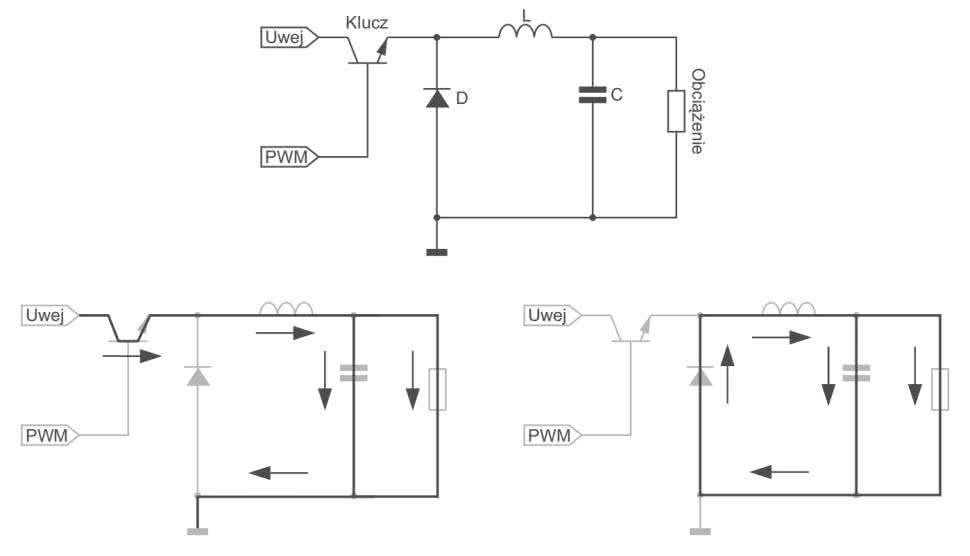
Spadający prąd cewki wymusza na jej wejściowym wyprowadzeniu napięcie ujemne, ostatecznie osiągając punkt, w którym załącza się dioda D. Prąd cewki indukcyjnej następnie przepływa przez obciążenie i z powrotem przez diodę. Gdy klucz jest wyłączony, ładunek zgromadzony w kondensatorze również płynie do obciążenia, dokładając się do sumy prądu dostarczanego do obciążenia (całkowity prąd obciążenia w czasie wyłączenia jest sumą prądu cewki i kondensatora). Przebieg prądu przepływającego przez cewkę jest pokazany na rysunku 6.

Prąd płynący przez cewkę zwiększa się, gdy przełącznik jest włączony i spada, gdy klucz jest otwarty. Prąd obciążenia ze stabilizowanego wyjścia układu to średnia wartość prądu cewki indukcyjnej. Różnicę między szczytami w przebiegu prądu cewki indukcyjnej określa się jako prąd tętnienia cewki indukcyjnej. Konieczne jest dobranie cewki tak, aby mogła przenosić ten prąd - najlepiej, aby prąd tętnienia stanowił nie więcej niż 20…30% nominalnego prądu znamionowego cewki.
Działanie ciągłe i nieciągłe
W większości zastosowań regulatora Buck prąd cewki indukcyjnej nigdy nie spada do zera. Ogólna sprawność układu jest zwykle najlepsza w trybie ciągłym dla danego napięcia wejściowego i prądu znamionowego. W zastosowaniach, w których maksymalny prąd obciążenia jest dość niski, może być korzystne zastosowanie przetwornicy, która pracuje w trybie nieciągłym.
W przypadku pracy z bardzo niewielkim prądem wyjściowym przetwornica pracująca z nieciągłym prądem cewki może być istotnie mniejsza, dzięki możliwości zredukowania wymiaru wyjściowej cewki indukcyjnej (z uwagi na niższe wymagania prądu cewki). Zasadniczo praca w trybie nieciągłym przy niższych wartościach prądu obciążenia jest nieszkodliwa. Nawet przetwornice zaprojektowane do pracy w trybie ciągłym przy pełnym obciążeniu pracują z nieciągłym prądem przy niższym prądzie obciążenia (zwykle bez żadnych poważnych konsekwencji).
Boost
Stabilizator typu Boost generuje napięcie wyjściowe wyższe (ale o tej samej polaryzacji) niż napięcie na wejściu. Układ o takiej topologii, wraz z oznaczeniem ścieżki przepływu prądu podczas włączenia i wyłączenia klucza w układzie, pokazano na rysunku 7.
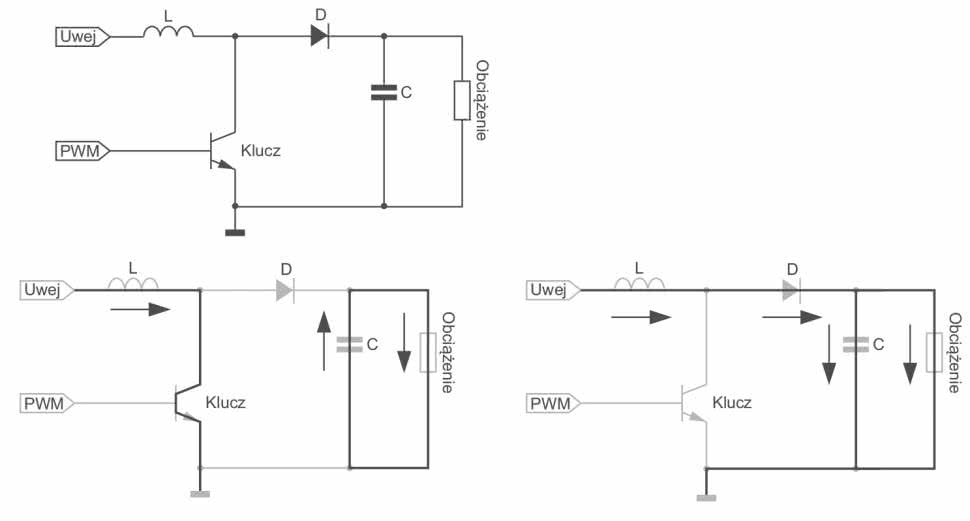
Ilekroć klucz jest zwarty, napięcie wejściowe jest wymuszane na cewce indukcyjnej, co powoduje wzrost płynącego przez nią prądu. Gdy tranzystor jest wyłączony, malejący prąd wymusza na cewce od strony tranzystora dodatnią polaryzację. Ponieważ klucz jest otwarty, prąd musi wtedy popłynąć przez diodę w kierunku kondensatora i obciążenia. Sprawia to, że kondensator wyjściowy może być ładowany do wyższego napięcia niż napięcie zasilania. Gdy klucz zostaje załączony, prąd do obciążenia dostarczany jest z kondensatora wyjściowego.
Prąd wyjściowy i moc pobierana przez obciążenie
Ważnym aspektem konstrukcyjnym w stabilizatorze typu Boost jest fakt, że prąd obciążenia i prąd klucza nie są sobie równe, a maksymalny prąd obciążenia jest zawsze mniejszy niż prąd znamionowy tranzystora przełączającego. Należy zauważyć, że całkowita maksymalna moc dostępna dla przetwornicy jest równa pomnożonemu napięciu wejściowemu i maksymalnemu średniemu prądowi wejściowemu (który jest zazwyczaj mniejszy niż prąd znamionowy tranzystora przełączającego). Ponieważ napięcie wyjściowe przetwornicy Boost jest wyższe niż napięcie wejściowe, prąd wyjściowy musi być mniejszy niż prąd wejściowy.
Buck-Boost
Stabilizatory o topologii Buck-Boost zwanej odwracającą przyjmuje stałe napięcie wejściowe i wytwarza stałe napięcie wyjściowe o przeciwnej polaryzacji. Ujemne napięcie wyjściowe może być większe lub mniejsze niż napięcie wejściowe (wartość bezwzględna).
Na rysunku 8 pokazano uproszczony schemat stabilizatora tego rodzaju.
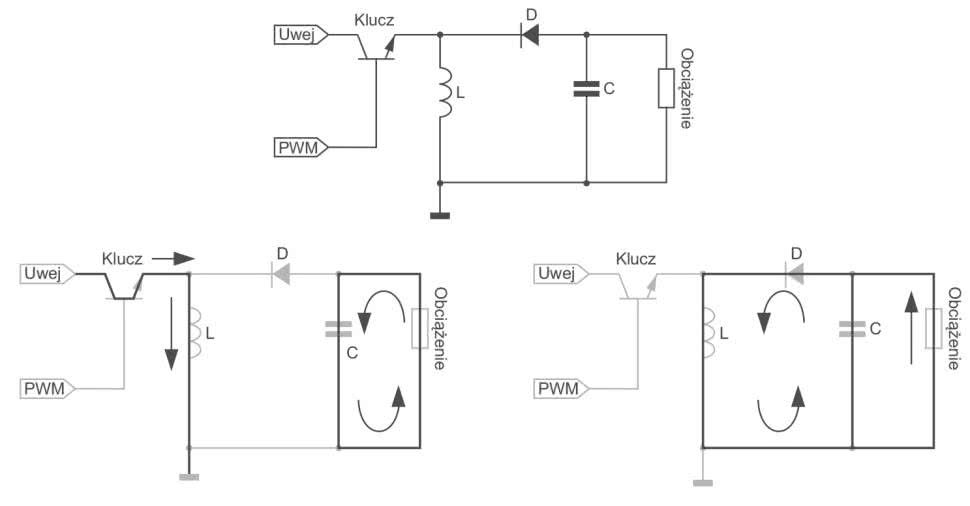
Gdy klucz jest załączony, napięcie wejściowe jest podawane na cewkę indukcyjną, powodując zwiększenie przepływu prądu przez ten element. W tym czasie kondensator wyjściowy dostarcza prądu do obciążenia. Wymaga to, aby ładunek utracony z kondensatora wyjściowego w czasie był uzupełniony w czasie wolnym. Gdy tranzystor zostanie wyłączony, malejący przepływ prądu przez cewkę powoduje, że napięcie na końcu cewki podłączonym do diody zmienia się na ujemne. To działanie włącza diodę, pozwalając, by prąd płynął zarówno na kondensator wyjściowy, ładując go, jak i do obciążenia. Prąd obciążenia dostarczany jest przez cewkę przetwornicy, gdy klucz jest rozłączony, a przez kondensator wyjściowy, gdy klucz jest zwarty.
Flyback
Topologia Flyback jest najbardziej wszechstronną ze wszystkich topologii przetwornic; pozwala projektantowi wygenerować jedno lub więcej napięć wyjściowych, z których niektóre mogą mieć przeciwną do napięcia wejściowego biegunowość. Przetwornice i stabilizatory Flyback zyskały ogromną popularność w systemach zasilanych z baterii, gdzie pojedyncze napięcie z baterii należy wykorzystać do wygenerowania wszystkich napięć w danym systemie (na przykład 5 V, 12 V i -12 V) przy bardzo wysokiej sprawności konwersji. Typowy schemat przetwornicy o topologii Flyback zaprezentowano na rysunku 9.
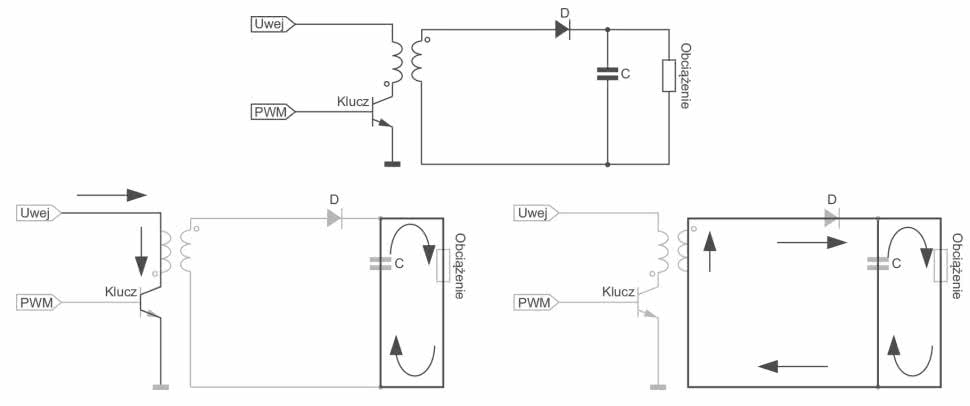
Najważniejszą cechą stabilizatora Flyback jest konieczność podłączania transformatora w odpowiedniej fazie, jak pokazano kropkami na uzwojeniu pierwotnym i wtórnym. Gdy klucz przetwornicy jest załączony, napięcie wejściowe płynie przez pierwotne uzwojenie transformatora, co powoduje rosnący przepływ prądu. Należy zauważyć, że polaryzacja napięcia na uzwojeniu pierwotnym jest ujemna względem oznaczenia polaryzacji uzwojenia (kropka przy uzwojeniu). Przepływ prądu przez uzwojenie pierwotne powoduje pojawienie się napięcia o tej samej polaryzacji na uzwojeniu wtórnym transformatora. Amplituda tego napięcia jest ustalona przez stosunek liczby uzwojeń wtórnych i pierwotnych na transformatorze.
Napięcie ujemne na uzwojeniu wtórnym jest prostowane przez umieszczoną szeregowo z nim diodę, zapobiegającą przepływowi prądu w uzwojeniu wtórnym. W tym czasie prąd do obciążenia musi być dostarczany przez kondensator wyjściowy. Kiedy klucz wyłącza się, malejący przepływ prądu w uzwojeniu pierwotnym wymusza zwiększenie napięcia na końcu tego uzwojenia oznaczonym kropką. W tym samym czasie napięcie na uzwojeniu wtórnym równe jest napięciu na uzwojeniu pierwotnym, ze zmienioną polaryzacją (zwróć uwagę na położenie kropki przy uzwojeniu wtórnym). Dodatnie napięcie, indukowane na uzwojeniu wtórnym, umożliwia przepływ prądu do obciążenia jak, i do kondensatora wyjściowego. Ładunek kondensatora wyjściowego w czasie wyłączania klucza jest uzupełniany.
Przetwornice o topologii Flyback działają w trybie ciągłym (gdy prąd uzwojenia wtórnego jest zawsze > 0) lub w trybie nieciągłym (w którym prąd uzwojenia wtórnego spada do zera w każdym cyklu pracy przetwornicy).
Stabilizacja wielu wyjść
Dużą zaletą przetwornic o architekturze Flyback jest możliwość stabilizacji wielu napięć wyjściowych (rysunek 10). W takich systemach jedno z wyjść (zwykle to o najwyższym prądzie) jest wybrane, aby dostarczyć informacje do sprzężenia zwrotnego systemu PWM, tj. do pętli sterowania, co oznacza, że to napięcie wyjściowe jest bezpośrednio stabilizowane. Inne uzwojenia wtórne są stabilizowane pośrednio m.in. przez stosunek liczby zwojów w uzwojeniach (jeśli pobór prądu z poszczególnych uzwojeń nie jest diametralnie różny, nie ma to wielkiego wpływu na precyzję ich stabilizacji).

Przetwornica Flyback z wieloma wyjściami charakteryzuje się precyzją stabilizacji na nieregulowanych pętlą sprzężenia zwrotnego wyjściach na poziomie 5...10%, ale jest to wartość wystarczająca do wielu zastosowań. Jeśli wymagana jest ściślejsza stabilizacja napięć, szczególnie dla niższych prądów, doskonałym rozwiązaniem jest dodanie za częścią impulsową bloku liniowego stabilizatora LDO. W takiej sytuacji napięcie wyjściowe z przetwornicy skonfigurować można jako wyższe o około 1 V od wymaganego napięcia, by zapewnić odpowiedni spadek napięcia dla układu LDO. Taka hybrydowa konstrukcja zapewnia z jednej strony wysoką precyzję stabilizacji napięcia zasilania, a z drugiej strony dużą sprawność i niewielkie generowanie ciepła w układzie.
Wskazówki dotyczące aplikacji stabilizatorów impulsowych
Wpływ pasożytniczych parametrów kondensatorów na działanie przetwornicy
Wszystkie kondensatory, oprócz pojemności, mają także parametry pasożytnicze, które sprawiają, że efektywnie uzyskiwane elementy układu zawierającego te elementy mogą różnić się od teoretycznych przewidywań. Na rysunku 11 pokazano schemat rzeczywistego kondensatora, który zawiera w sobie idealną pojemność C oraz wszystkie pozostałe elementy pasożytnicze.
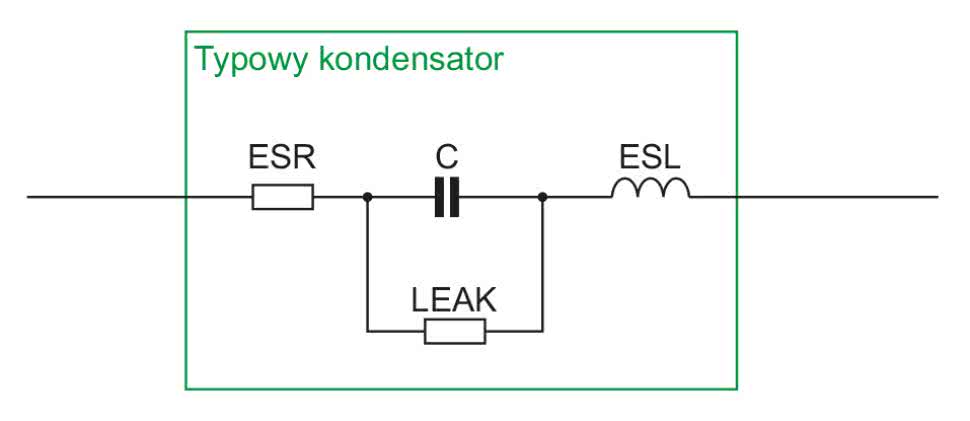
Rzeczywisty kondensator zawiera szereg pasożytniczych elementów wpływających na jego zdolność do pracy w przetwornicy impulsowej. Najważniejszymi z nich są ESR (zastępcza rezystancja szeregowa) i ESL (zastępcza indukcyjność szeregowa).
Skutkiem występowania ESR w kondensatorze jest wewnętrzne ogrzewanie się elementu spowodowane rozproszeniem mocy prądu tętnienia, który wpływa do kondensatora. Powoduje to, że kondensator może ulec awarii, jeśli prąd tętnienia przekroczy maksymalną wartość znamionową. Nadmierne tętnienie napięcia wyjściowego będzie również wynikiem wysokiego ESR. Możliwa jest również niestabilność działania pętli sprzężenia zwrotnego stabilizatora. ESR jest wysoce zależny od temperatury - bardzo szybko rośnie w temperaturze poniżej około 10°C.
Parametr ESL ogranicza sprawność do tłumienia zakłóceń wysokiej częstotliwości. Sprawia, że kondensatory elektrolityczne muszą być dodatkowo odsprzęgane podłączonym równolegle kondensatorem foliowym lub ceramicznym, który zapewnia dobrą jakość działania dla wysokiej częstotliwości.
Dodatkowo elementy ESR, ESL i C w rzeczywistym kondensatorze tworzą obwód rezonansowy, którego częstotliwość rezonansu powinna być umiejscowiona tak wysoko jak to tylko możliwe. Stabilizatory impulsowe generują tętnienie napięcia na ich wyjściu o bardzo wysokiej częstotliwości (powyżej 10 MHz), które mogą powodować oscylacje napięcia wyjściowego, jeśli częstotliwość rezonansowa kondensatora jest wystarczająco blisko częstotliwości tętnienia napięć na wyjściu.
Kondensator wejściowy
Wszystkie przetwornice impulsowe opisane w tym artykule działają jako przetwornice DC/DC, które kluczują napięcie wejściowe przy bardzo wysokiej częstotliwości. Klucz przetwornicy musi pobierać impulsy prądowe ze źródła wejściowego. Impedancja wyjściowa tego źródła jest niezwykle ważna, ponieważ nawet niewielka indukcyjność może powodować znaczące oscylacje i niezamierzony wzrost napięcia na wejściu konwertera. Najlepszą praktyką rozwiązania tego problemu jest zapewnienie odpowiedniego filtrowania wejścia poprzez dodanie kondensatora równoległego do wejścia tak blisko, jak to tylko możliwe. Typowo stosuje się w tym miejscu kondensator elektrolityczny wspólnie z podłączonym równolegle kondensatorem cienkowarstwowym i/lub kondensatorem ceramicznym. Pozwala to zredukować impedancję wyjściową dla szerokiego zakresu częstotliwości.
Kondensator wyjściowy
Podstawowym zadaniem kondensatora wyjściowego w stabilizatorze impulsowym jest filtrowanie napięcia wyjściowego. W ramach działania przetwornicy prąd musi wpływać i wypływać z kondensatora filtra wyjściowego do obciążenia. ESR kondensatora wyjściowego wpływa bezpośrednio na sprawność działania stabilizatora. Parametr ESR jest określony przez producenta na kondensatorach dobrej jakości, ale koniecznie uwzględnić trzeba częstotliwość, przy której zmierzono ten parametr. Typowe kondensatory elektrolityczne ogólnego przeznaczenia zwykle określają ESR przy 120 Hz, ale kondensatory przeznaczone do zastosowań z układami impulsowymi wysokich częstotliwości będą miały gwarancję uzyskania ESR na zadeklarowanym poziomie dla wysokich częstotliwości (typowo od 20 kHz do 100 kHz).
Niektóre parametry zależne od ESR to:
- Napięcie tętnienia - w większości przypadków napięcie tętnienia na wyjściu stabilizatora impulsowego jest niezerowe i zależy od ESR kondensatora wyjściowego. Jeśli ESR wzrośnie (np. w niskiej temperaturze pracy), napięcie tętnienia na wyjściu odpowiednio wzrośnie;
- Sprawność - gdy prąd przepływa do kondensatora i wypływa z niego (przez opór ESR), moc jest rozpraszana wewnętrznie. Ta zmarnowana moc zmniejsza ogólną sprawność stabilizatora, a także może spowodować jego awarię, jeśli prąd tętnienia przekroczy maksymalna dopuszczalną dla danego kondensatora;
- Stabilność pętli - ESR kondensatora wyjściowego może wpływać na stabilność działania pętli sprzężenia zwrotnego stabilizatora. Wiele elementów ma pewne układy kompensacji, ale działają one przy założeniu, że ESR kondensatora wyjściowego pozostanie w pewnym określonym zakresie. Utrzymywanie ESR w „stabilnym” zakresie nie zawsze jest proste w projektach, które muszą działać w szerokim zakresie temperatur. ESR typowego aluminiowego kondensatora elektrolitycznego może wzrosnąć nawet 40-krotnie, gdy temperatura spadnie z 25°C do -40°C. W takich przypadkach kondensatory elektrolityczne powinny być uzupełnione równolegle podłączonymi innymi kondensatorami z bardziej płaską krzywą ESR w funkcji temperatury, dzięki czemu efektywny ESR obu elementów pozostanie w dopuszczalnym zakresie.
Kondensatory filtrujące wysokiej częstotliwości
Kondensatory stosowane do filtrowania zasilania w systemach z zasilaczami impulsowymi powinny być dodatkowo uzupełniane kondensatorami filtrującymi dla wysokich częstotliwości. Są one szczególnie wymagane dla układów scalonych, które znajdują się blisko przetwornicy. Elementy wykonujące szybkie przełączanie (tranzystory i prostowniki) generują znaczące ilości zakłóceń elektromagnetycznych, które z łatwością promieniują na ścieżki na PCB, jak i przewody zasilania. Aby zapewnić poprawne działanie układów, wszystkie piny zasilania układu scalonego muszą być filtrowane kondensatorami podłączonymi do zasilania i masy. Pozwalają one na odprowadzanie energii zakłóceń do masy.
Prowadzenie masy
Poziom masy w obwodzie powinien mieć jeden potencjał w całym układzie, ale w rzeczywistości nigdy tak nie jest. Gdy prądy masy przepływają przez ścieżki o niezerowej rezystancji, różnica napięcia będzie występowała w różnych punktach wzdłuż ścieżki masy.
W obwodach prądu stałego lub dla niskich częstotliwości prowadzenie ścieżek masy jest stosunkowo proste: jedynym parametrem o kluczowym znaczeniu jest stałoprądowa rezystancja ścieżek masy, ponieważ to ona określa spadek napięcia dla danego prądu.
W obwodach wysokiej częstotliwości znacznie ważniejsza jest impedancja ścieżek, na którą składa się rezystancja stałoprądowa oraz impedancja i pojemność ścieżek masy.
W przetwornicach impulsowych prądy szczytowe płyną w impulsach o wysokiej częstotliwości (często powyżej 50 kHz), co może powodować poważne problemy, jeśli indukcyjność ścieżek jest wysoka. Znaczna część oscylacji obserwowanych w napięciu zasilającym jest wynikiem właśnie zbyt wysokiej indukcyjności ścieżek lub połączeń kablowych.
Prąd przy wysokich częstotliwościach ma tendencję do płynięcia w pobliżu powierzchni przewodnika (nazywa się to efektem naskórkowym), co oznacza, że ścieżki muszą być bardzo szerokie na PCB, aby uniknąć problemów związanych ze zbyt wysoką ich impedancją.
Zwykle najlepiej (jeśli to możliwe) użyć jednej strony płytki drukowanej jako płaszczyzny - wylewki - dla masy. Rysunek 12 pokazuje schematycznie niepoprawnie zaprojektowany system ze źle poprowadzoną masą.
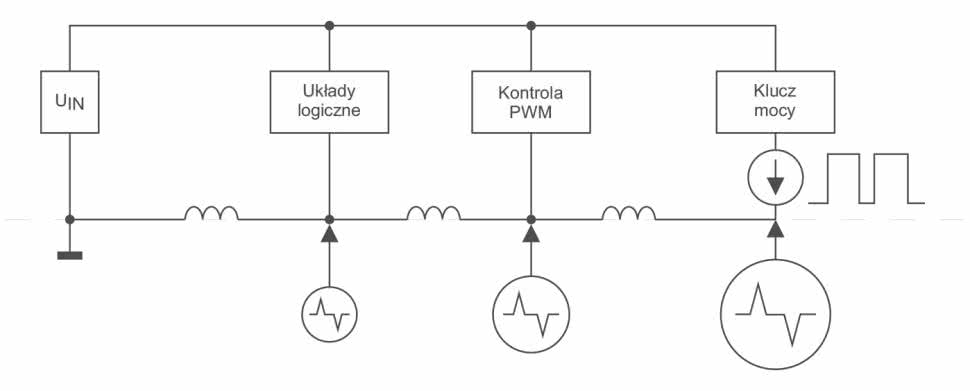
Pokazany na rysunku 12 układ przewodzi prąd powrotny o dużej mocy przez te same ścieżki, którymi płynie prąd powrotny z innych obwodów - sterowania przetwornicą (PWM) i zasilanych obwodów logicznych. Przełączanie impulsu powoduje, że skok prądu płynącego przez ścieżkę generuje skok napięcia (dodatni i ujemny) w wyniku wzrostu i opadania zbocza prądu. Ten skok napięcia wynika bezpośrednio z zasady działania indukcyjności opisanej różniczką (patrz równanie 1).
Należy zauważyć, że wielkość impulsu napięcia będzie różna wzdłuż całej ścieżki, będąc największą w pobliżu klucza w module zasilania. Jeśli jako punkt odniesienia weźmie się jakiś wirtualny, stabilny punkt masy i zmierzy się potencjały na różnych obwodach systemu, można zauważyć, że po pierwsze, skok napięcia masy powoduje skok wszystkich napięć względem zewnętrznego poziomu masy. Co gorsza, po drugie, to napięcia w układzie na skutek impulsu zmieniają się też względem siebie z uwagi na to, że skok napięcia jest różny w różnych punktach źle zaprojektowanej masy.
Nieprawidłowe działanie układu często występuje, gdy wrażliwe części obwodu zasilane są niestabilnym napięciem z powodu prądów przełączania płynących w potencjale masy. Może to wywoływać szum w poziomach odniesienia czy zmiany napięcia wyjściowego urządzenia, co przekłada się na nadmierne tętnienia wyjściowe całego układu.
Bardzo często stabilizatory mają problemy z szumem, pracują niestabilnie i łatwo wpadają w oscylacje wraz ze wzrostem prądu obciążenia (co zwiększa prądy masy). Znacznie lepszy układ niż opisywany powyżej pokazano na rysunku 13. Dużą poprawę wprowadza zmiana topologii masy na gwiazdę. Dodatkowo wysokiej jakości kondensator elektrolityczny (jak kondensator tantalowy) jest używany w pobliżu wejścia napięcia, zapewniając dobry punkt stabilnej masy. Wszystkie elementy obwodu są podłączone do tego punktu za pomocą osobnych ścieżek masy. Zapobiega to wpływania impulsów w potencjale masy na układy logiczne i inne czułe systemy elektroniczne.
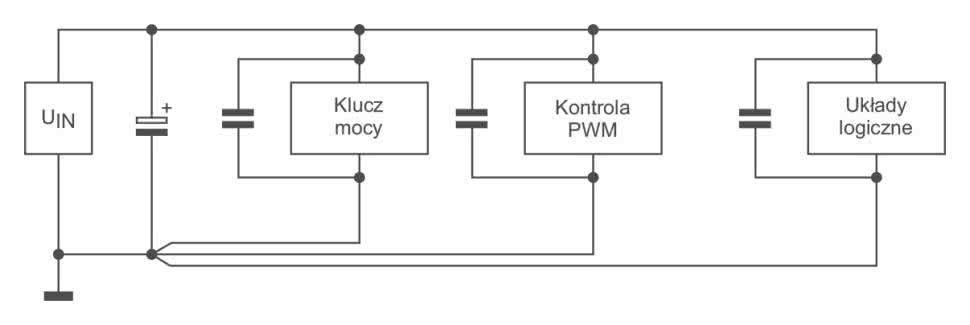
Kolejną ważną poprawą jest to, że klucz sekcji zasilania znajduje się jak najbliżej kondensatora wejściowego. To minimalizuje śladową indukcyjność wzdłuż ścieżki masy, redukując impedancję. Należy również zauważyć, że poszczególne bloki obwodów także mają swoje lokalne kondensatory filtrujące podłączone bezpośrednio do tych bloków. Celem tego kondensatora jest odprowadzanie zakłóceń RF, więc element ten musi być kondensatorem ceramicznym lub cienkowarstwowym, by zapewnić niski ESR dla wysokiej częstotliwości.
Dobrą wartością pojemności do filtrowania zasilania układów logicznych są ceramiczne kondensatory o pojemności 10 nF, dystrybuowane zgodnie z wymaganiami układu. Jeśli obwód, który ma zostać odfiltrowany, generuje duże impulsy prądowe, wymagana jest większa pojemność filtrująca. Dobrym wyborem są tutaj aluminiowe kondensatory elektrolityczne z dodatkowo podłączonym kondensatorem foliowym i ceramicznym o mniejszej pojemności. Dokładna wielkość pojemności zależy od prądu szczytowego - im większy prąd płynie daną ścieżką, tym wyższa musi być pojemność, by dać pożądany wynik.
Rdzenie cewek i transformatorów a promieniowane zakłócenia EMI
Rodzaj rdzenia zastosowanego w cewce indukcyjnej lub transformatorze wpływa bezpośrednio na jego koszt oraz rozmiar i charakterystykę emitowanych zakłóceń. Zakłócenia elektromagnetyczne, emitowane przez transformator, są niezwykle ważne, ponieważ ich obecność może sprawiać, że wymagane będzie ekranowanie, aby zapobiec niepoprawnemu działaniu wrażliwych obwodów, znajdujących się w pobliżu stabilizatora impulsowego.
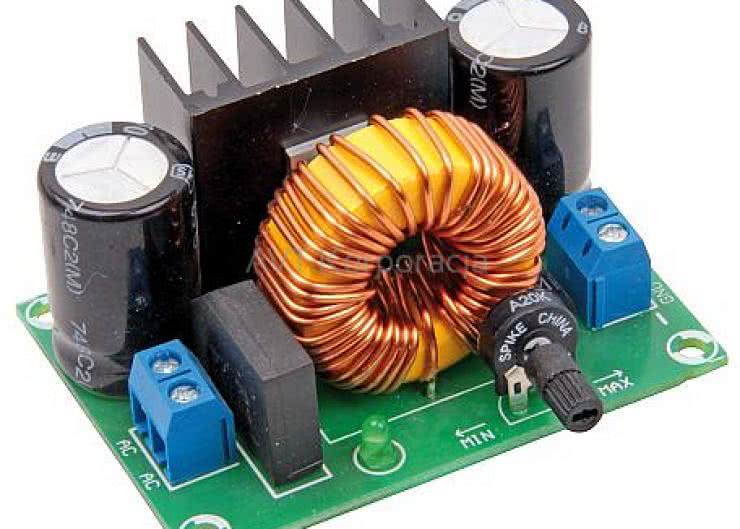
Każdy rodzaj zastosowanego rdzenia ma swoje zalety i wady. To, jaki rdzeń należy zastosować do danej aplikacji, zależy głównie od wymagań dotyczących zakłóceń, wielkości itp. Ważnym aspektem przy ocenie poziomu generowanego szumu elektromagnetycznego, jaki generuje dana indukcyjność czy transformator, jest ścieżka strumienia magnetycznego w jego obwodzie magnetycznym. Na rysunku 14 porównano podstawowe typy rdzeni cewek - walcowe i toroidalne. Pole w rdzeniu w kształcie walca opuszcza jeden koniec rdzenia, przemieszcza się w powietrzu i wraca do drugiego końca. Rdzeń tego kształtu emituje najwyższy strumień magnetyczny. W większości przypadków takie rdzenie oznaczają również najtańszy komponent dla danego rozmiaru cewki (jest on bardzo tani w produkcji).
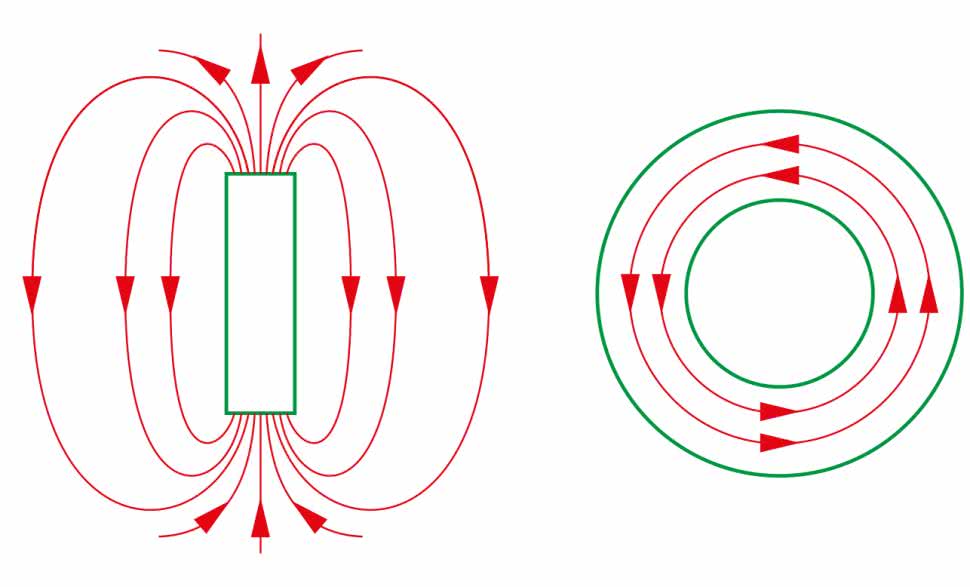
Ścieżka strumienia magnetycznego w rdzeniu toroidalnym jest całkowicie zawarta w rdzeniu. Z tego powodu ma on najniższy poziom emisji strumienia. Elementy rdzenia toroidalnego są zwykle większe i droższe w porównaniu do innych rodzajów rdzenia. Uzwojenie toroida jest dość trudne w nawijaniu (i wymaga specjalnego wyposażenia), zwiększając koszt końcowy wyprodukowanego transformatora.
Istnieje jeszcze inna klasa rdzeni, powszechnie stosowanych w elementach magnetycznych, które mają właściwości ograniczania emisji strumienia poza element indukcyjny. Są nieznacznie lepsze niż rdzeń typu walcowego, ale nie tak dobre jak toroidy. Rdzenie te są dwuczęściowymi zespołami i są montowane przez sklejenie elementów rdzenia razem wokół karkasu przytrzymującego uzwojenie. Dwuczęściowe rdzenie są często wyposażane w szczelinę powietrzną, aby zapobiec nasyceniu materiału rdzenia. Szczelinę powietrzną instaluje się przez sfrezowanie niewielkiej części rdzenia (różnica może wynosić zaledwie kilkanaście mikronów). Rysunek 15 pokazuje popularne rdzenie E-I, E-E i kubełkowe, często stosowane w stabilizatorach impulsowych jako transformatory. Na rysunku pokazane są miejsca, w których umieszczona jest szczelina powietrzna w rdzeniu. Dla jasności pominięto uzwojenie/karkas.
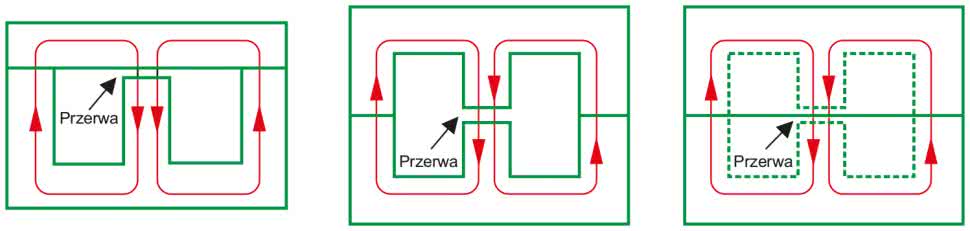
Szczelina powietrzna może emitować część strumienia magnetycznego poza transformator, ponieważ strumień przepływający przez rdzeń musi przejść przez szczelinę powietrzną, aby dotrzeć do kolejnej części rdzenia. Rdzenie E-E i E-I są dość tanie i łatwe w produkcji i są bardzo powszechne w aplikacjach o mocy do około 1 kW. Istnieje szeroki wybór rozmiarów i kształtów, wykonanych z różnych materiałów ferrytowych zoptymalizowanych pod kątem sprawności przełączania. Promieniowany strumień z tego rodzaju rdzeni jest nadal rozsądny niski i zwykle można nim zarządzać przez dobry układ elementów na płytce drukowanej.
Zaletą rdzeni kubełkowych jest mniejszy strumień magnetyczny promieniowany poza rdzeń - mniejszy niż w przypadku rdzeni E-E czy E-I, dzięki czemu rdzeń kubełkowy ustępuje, pod względem generowanych zakłóceń, tylko elementom na rdzeniach toroidalnych.
Rdzenie kubełkowe są też zazwyczaj droższe niż rdzenie E-E lub E-I o porównywalnej mocy znamionowej. Niezależnie od tego, transformatory rdzeniowe są znacznie łatwiejsze i tańsze w produkcji niż transformatory toroidalne, ponieważ uzwojenia są umieszczone na standardowym karkasie, a następnie montowane na rdzeniu, zamykanym wokół niego.
W każdej aplikacji trzeba rozważyć wady i zalety poszczególnych rodzajów rdzeni indukcyjności/transformatorów i dokonać wyboru - kompromisu, pomiędzy ceną, rozmiarem i poziomem generowanych zakłóceń EMI dla danych wymagań mocy znamionowej elementu.
Mierzenie tętnienia napięcia na wyjściu
Tętnienie napięcia zawsze pojawiają się na wyjściu stabilizatora impulsowego z uwagi na jego zasadę działania. Uzyskanie dokładnego pomiaru napięcia tętnienia nie zawsze jest proste. Jeśli przebieg napięcia wyjściowego jest mierzony za pomocą oscyloskopu, dokładny wynik można uzyskać tylko przy użyciu sondy (rysunek 16).
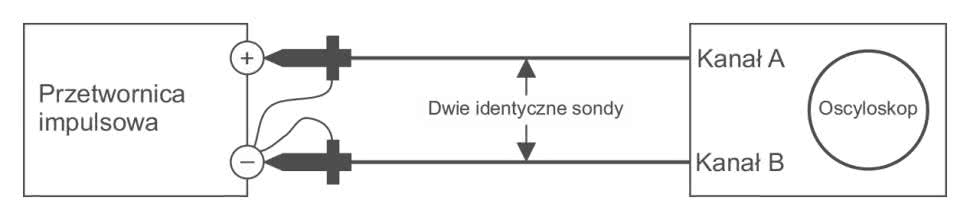
Pokazany pomiar różnicowy wykorzystuje drugi kanał oscyloskopu do usunięcia sygnału współbieżnego dla obu kanałów (poprzez odwrócenie kanału B i dodanie go do kanału A). Powodem, dla którego należy zastosować tę metodę, jest to, że szybko zmieniające się komponenty w stabilizatorze impulsowym generują skoki napięcia, które mają znaczną energię i częstotliwość. Sygnały te można bardzo łatwo odebrać za pomocą „anten” - np. fragmentu przewodu o długości 75...100 mm będącego masą sondy pomiarowej. Tylko różnicowy pomiar pozwala na wyeliminowanie tych zakłóceń z pomiaru.
Zakładając, że sondy są dobrze dopasowane, sonda z kanałem B zbierze takie same zakłócenia na ten sam promieniowany sygnał jak sonda A, co pozwala na wyeliminowania zakłóceń poprzez wyliczenie różnicy pomiędzy kanałami.
Często konieczne jest zmierzenie napięcia tętnienia wyjściowego RMS. Zwykle robi się to za pomocą woltomierza cyfrowego. Jeśli uzyskany odczyt ma być wartościowy i poprawny, podczas pomiaru należy wziąć pod uwagę następujące kwestie:
- Miernik musi być odczytem rzeczywistej wartości skutecznej, ponieważ przebiegi, które mają być mierzone, są bardzo dalekie od sinusoidy;
- Pasmo licznika (-3 dB) powinno wynosić co najmniej trzykrotność pasma mierzonego sygnału (częstotliwość tętnienia napięcia wyjściowego zwykle jest większa niż 100 kHz);
- Od pomiaru należy odjąć poziom szumu. Aby zmierzyć poziom szumu tła, należy podłączyć oba przewody miernika do ujemnego wyjścia stabilizatora - to wartość szumu do zapamiętania.
Mierzenie sprawności stabilizatorów z przetwornicami DC/DC
Sprawność (h) stabilizatora impulsowego jest zdefiniowana jako:
h=PLOAD/PTOTAL (2)
Przy określaniu sprawności układu pierwszą rzeczą, którą należy zmierzyć, jest sumaryczny pobór mocy (PTOTAL). Zakładając stałe napięcie wejściowe, PTOTAL definiuje się jako całkowitą moc pobieraną ze źródła, która jest równa:
PTOTAL=VIN·IIN(średni) (3)
gdzie VIN to napięcie wejściowe a IIN(średni) to średni prąd wejścia.
Należy zauważyć, że wartość prądu wejściowego zastosowana w obliczeniach musi być średnią z przebiegu prądu wejściowego, który nie jest ani prądem stałym, ani przebiegiem sinusoidalnym. Ponieważ łączna rozpraszana moc musi być stała od wejścia do wyjścia,
PTOTAL jest także równa mocy obciążenia oraz mocy strat na stabilizatorze, jak zapisano w równaniu 4:
PTOTAL=POBCIĄŻENIA+PSTRAT (4)
Mierzenie (lub obliczanie) mocy obciążenia jest bardzo proste, ponieważ moc wyjściowa - napięcie i prąd są stałe. Moc obciążenia określa równanie 5:
POBCIĄŻENIA=VOUT·IOBCIĄŻENIA (5)
Pomiar mocy wejściowej pobieranej ze źródła nie jest niestety tak prosty. Chociaż napięcie wejściowe na stabilizatorze jest stałe, to prąd pobierany przez układ impulsowy nie jest. Jeśli do pomiaru prądu wejściowego używany jest typowy amperomierz, to zebrane dane będą w zasadzie bez sensu.
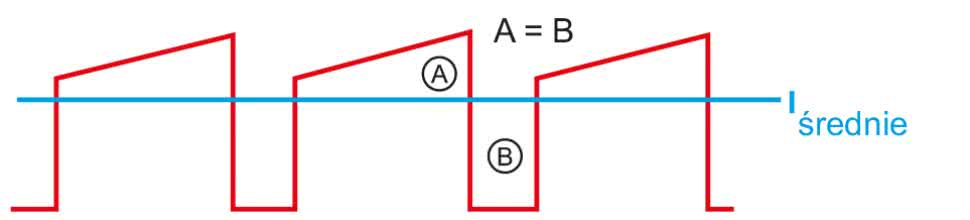
Średni prąd wejściowy stabilizatora można zmierzyć dosyć dokładnie dzięki zastosowaniu sondy szerokopasmowej podłączonej do oscyloskopu. Średnią wartość prądu wejściowego można dokładnie wyznaczyć, uśredniając w czasie przebieg pomiaru prądu (zebrany np. za pomocą niewielkiego opornika wstawionego w szereg z wejściem), np. taki jak pokazano na rysunku 17. W ten sposób można zmierzyć średni prąd, który jest równy wartości prądu stałego, który wytworzyłby tę samą moc wejściową.
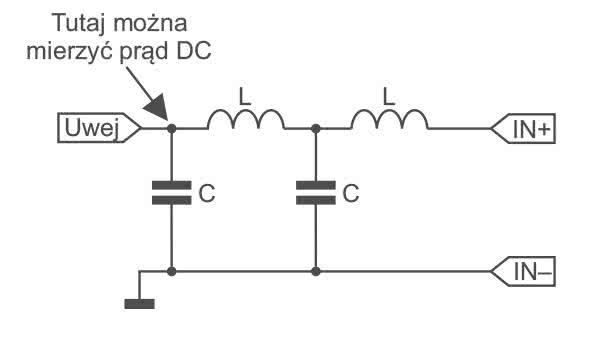
Jeśli potrzebne są dokładniejsze pomiary, można wymusić przepływ stałego prądu w linii zasilania przetwornicy za pomocą filtra L-C pomiędzy źródłem prądu a wejściem układu stabilizatora impulsowego, jak pokazano na rysunku 18. Jeśli elementy filtra L-C mają wystarczająco duże wartości, prąd wejściowy dla stabilizatora impulsowego będzie prądem stałym bez komponentu zmiennego. Oznacza to, że można będzie go dokładnie zmierzyć za pomocą prostego amperomierza. Konieczne jest umieszczenie dużego kondensatora o niskiej wartości ESR jako kondensatora wejściowego (CIN) przetwornicy impulsowej. Filtr L-C, podłączony pomiędzy przetwornicę a źródło prądu, ma bardzo wysoką impedancję dla prądu zmiennego, dlatego też kondensator CIN jest niezbędny do zapewnienia dostatecznego prądu dla działania układu. Strzałką na rysunku 18 oznaczono miejsce, w którym płynący prąd będzie stały i gdzie należy go mierzyć.
Mierzenie sprawności stabilizatorów z zasilaniem sieciowym
Przetwornice tego typu są zasilane bezpośrednio z linii prądu przemiennego z sieci za pomocą mostka prostowniczego oraz filtra pojemnościowego do generowania niestabilizowanego napięcia stałego podawanego na stabilizator impulsowy.
Pomiar całkowitej mocy pobieranej ze źródła prądu przemiennego jest dość trudny ze względu na konieczność pomiaru współczynnika mocy. Jeśli zarówno napięcie, jak i prąd są sinusoidalne, współczynnik mocy zdefiniowany jest jako kosinus kąta fazowego między napięciem a prądem. Wejściowy filtr pojemnościowy przetwornika sieciowego powoduje, że prąd wejściowy nie jest sinusoidalny. Prąd płynie w krótkich impulsach o wysokiej amplitudzie, co wymaga innego zdefiniowania współczynnika mocy w takich przypadkach.
W przypadku przetworników z filtrami pojemnościowymi na wejściu współczynnik mocy (PF) definiuje się jako:
PF=PREALNA/PPOZORNA (6)
Rzeczywistą mocą pobieraną ze źródła (PREALNA) jest moc równa sumie mocy obciążenia i wewnętrznych strat stabilizatora. Moc pozorna (PPOZORNA) jest równa prądowi wejściowemu RMS razy napięcie wejściowe RMS. Po podstawieniu tych wartości zapisać można następującą zależność:
IIN(RMS)=PREALNA/(VIN(RMS)·PF) (7)
Prąd wejściowy RMS, który musi dostarczyć źródło prądu przemiennego, wzrasta, gdy współczynnik mocy zmniejsza się do wartości poniżej jedności. Współczynniki mocy dla jednofazowego przetwornika zasilanego prądem przemiennym wynoszą zwykle około 0,6. Jeśli zastosowano prąd trójfazowy, współczynnik mocy wynosić może nawet do 0,9.
Aby zmierzyć sprawność przetwornika zasilanego z sieci, skorzystać należy z analizatora sieci, który mierzy napięcie wejściowe, moc wejściową i współczynnik mocy. Są one dość drogie, więc mogą nie być dostępne dla każdego projektanta. Inną metodą, która da porównywalne wyniki, jest pomiar mocy pobieranej przez układ za mostkiem prostowniczym i kondensatorami wejściowymi przetwornicy - tam, gdzie napięcie i prąd są stałe. Tę metodę pokazano na rysunku 19.
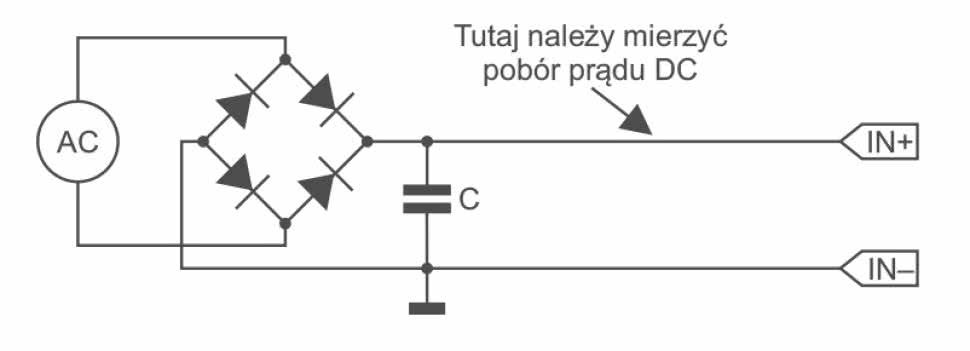
Prąd przepływający z CIN do przetwornika powinien być bardzo zbliżony do prądu stałego, a średnią wartość prądu stałego jest już dosyć łatwo zmierzyć. Całkowita moc pobierana ze źródła prądu przemiennego jest sumą mocy dostarczanej zmierzonej na CIN (czyli w przybliżeniu ilorazowi VIN·IIN(DC)) i mocy traconej na mostku prostowniczym na wejściu. Moc tracona na mostku jest łatwa do oszacowania i w rzeczywistości jest zwykle znikoma w systemach zasilanych z sieci.
Podsumowanie
Stabilizatory na bazie przetwornic impulsowych charakteryzują się wieloma zaletami - wysoką sprawnością, możliwością stabilizacji napięć wyższych lub niższych niż napięcie wejściowe, a nawet napięć o odwrotnej polaryzacji niż na wejściu. Dodatkowo niektóre topologie stabilizatorów impulsowych pozwalają na stabilizację wielu wyjść z pojedynczego napięcia zasilającego. Dzięki dodaniu do tego rodzaju układów liniowych stabilizatorów LDO można uzyskać system zasilania o wysokiej precyzji i sprawności do niemalże dowolnego urządzenia.
Nikodem Czechowski, EP