Zaloguj
Zaloguj




Stabilizatory liniowe są podstawowymi elementami składowymi niemal każdego zasilacza w urządzeniach elektronicznych. Scalone stabilizatory liniowe są łatwe w użyciu, praktycznie niezawodne oraz niedrogie. Jest to zwykle jeden z najtańszych elementów elektronicznych w zasilaczu.
Podstawy działania stabilizatora liniowego
Każdy obwód elektroniczny jest zaprojektowany do pracy przy określonym stałym napięciu zasilania. Stabilizator napięcia dostarcza na wyjściu napięcie o wymaganych parametrach. Zawiera zespół obwodów, które stale utrzymują napięcie wyjściowe przy zadanej wartości, niezależnie od zmian prądu obciążenia lub napięcia wejściowego (przy założeniu, że prąd obciążenia i napięcie wejściowe mieszczą się w określonym zakresie roboczym dla danego elementu).
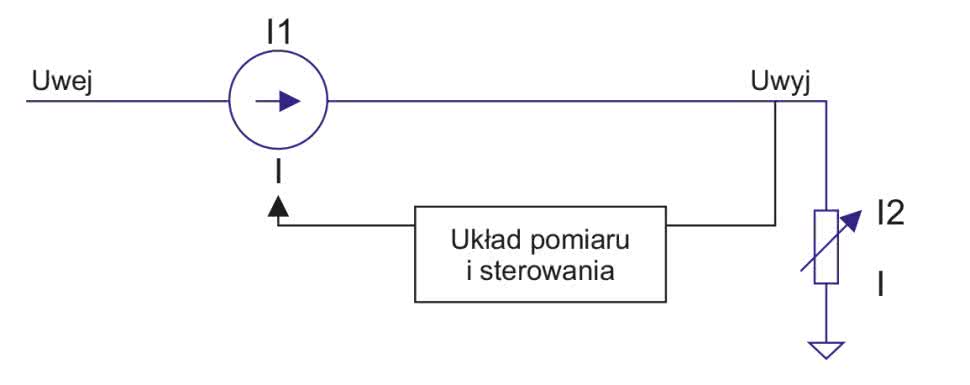
Stabilizator liniowy działa jak źródło prądowe sterowane napięciem w celu wymuszenia prądu, jaki płynie przez element – obciążenie, a stałe napięcie pojawiające się na zacisku wyjściowym stabilizatora jest wynikiem – zgodnie z prawem Ohma (rysunek 1). Obwód sterujący stabilizatorem musi monitorować napięcie wyjściowe i regulować źródło prądowe zgodnie z wymaganiami obciążenia – aby utrzymać napięcie wyjściowe na żądanej wartości. Granice funkcjonalne stabilizatora określa maksymalny prąd obciążenia regulatora, przy którym układ może nadal utrzymywać stabilne napięcie.
Napięcie wyjściowe jest kontrolowane za pomocą pętli sprzężenia zwrotnego, która wymaga pewnego rodzaju kompensacji zapewniającej stabilność pętli. Większość regulatorów liniowych ma wbudowane układy kompensacji i jest całkowicie stabilna bez zewnętrznych elementów. Niektóre stabilizatory, takie jak LDO, wymagają jednak pewnej zewnętrznej pojemności, podłączonej od wyjścia w celu zapewnienia stabilności układu.
Inną cechą każdego stabilizatora liniowego jest to, że wymaga on pewnej, ale skończonej ilości czasu by „skorygować” napięcie wyjściowe po zmianie zapotrzebowania na prąd obciążenia. To opóźnienie definiuje charakterystykę zwaną charakterystyką przejściową, która jest miarą szybkości działania stabilizatora, tj, szybkości z jaką powraca on do stanu ustalonego po zmianie obciążenia.
Pętla sterowania
Działanie pętli sterującej w typowym stabilizatorze liniowym zostanie szczegółowo opisane przy użyciu uproszczonego schematu ideowego, pokazanego na rysunku 2. Podobny układ jest częścią każdego stabilizatora liniowego. Urządzenie przejściowe (Q1) w tym stabilizatorze składa się z tranzystora NPN w układzie Darlingtona sterowanego przez tranzystor PNP. Prąd wypływający z emitera tranzystora przejściowego (który również jest prądem obciążenia) jest kontrolowany przez tranzystor Q2 i wzmacniacz błędu napięcia.
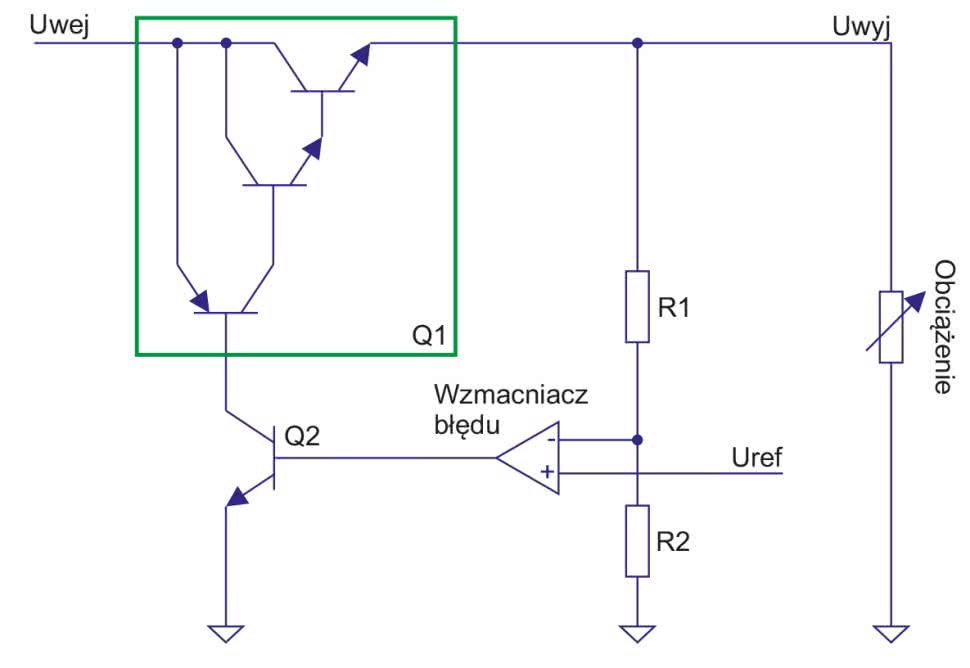
Na wejście odwracające wzmacniacza błędu przyłożone jest napięcie z dzielnika napięcia wyjściowego zestawionego z R1 i R2. Nieodwracające wejście jest połączone z napięciem odniesienia (Uref). Pętla sprzężenia zwrotnego układu stara się utrzymać na wyjściu stabilizatora napięcie równe napięciu referencyjnemu, pomnożonemu przez współczynnik wynikający z dzielnika napięcia R1/R2. Nagły wzrost lub spadek zapotrzebowania na prąd obciążenia (skokowa zmiana rezystancji obciążenia) spowoduje zmianę napięcia wyjściowego do momentu w którym pętla będzie mogła skorygować ustawienia i ustabilizować się do nowego poziomu (nazywa się to reakcją przejściową).
Zmiana napięcia wyjściowego jest wykrywana przez dzielnik R1/R2 i pojawia się jako sygnał błędu na wyjściu wzmacniacza błędu, co powoduje, że w konsekwencji koryguje on prąd poprzez Q1.
Typy stabilizatorów liniowych
Istnieją trzy podstawowe typy topologii wewnętrznej stabilizatorów liniowych, które zostaną opisane:
- Standardowy stabilizator z Darlingtonem NPN,
- Stabilizatory low-dropout (LDO),
- Stabilizatory quasi-LDO.
Najważniejszą różnicą między tymi trzema typami jest spadek napięcia, który jest zdefiniowany jako minimalny wymagany spadek napięcia na stabilizatorze utrzymujący napięcie wyjściowe na zadanym poziomie. Przekłada się to na sprawność energetyczną – układ z najmniejszym spadkiem napięcia (w tym wypadku LDO) wymaga najmniejszego zapasu napięcia, co powoduje najmniejszą ilość wydzielanego ciepła – marnowanej energii.
Drugą istotną różnicą między typami regulatorów jest prąd płynący przez układ do masy, jaki jest wymagany przez stabilizator dla uzyskania znamionowego prądu obciążenia. Standardowy stabilizator ma najniższy prąd masy, podczas gdy LDO generalnie ma ten prąd najwyższy (różnice między typami opisano szczegółowo w poniższych sekcjach). Zwiększony prąd pinu masy jest niepożądany, ponieważ jest to również prąd zmarnowany, gdyż pochłaniany jest przez stabilizator a nie przez obciążenie. Wpływa to na sprawność sekcji zasilania.
Standardowy stabilizator
Pierwsze scalone stabilizatory napięcia zawierały tranzystory NPN w konfiguracji Darlingtona dla układu tranzystora przejściowego. Taka konfiguracja nazywana jest standardową a topologię pokazano na rysunku 2. Rozważmy, jaki jest minimalny spadek napięcia w tym układzie, który jest konieczny do zapewnienia poprawnej stabilizacji napięcia wyjściowego. Minimalne napięcie VD można opisać równaniem (1):
VD(MIN) = 2 × VBE + VCE (1)
Przy założeniu szerokiego zakresu temperatur pracy – od –55°C do 150°C, minimalny spadek napięcia gwarantujący poprawność stabilizacji zawiera się zwykle w przedziale 2,5...3 V. W realnych warunkach napięcie to może być mniejsze, szczególnie dla mniejszego zakresu temperatur pracy. Praktycznie rzecz biorąc najmniejszy spadek napięcia, z jakim spotkać się można w przypadku standardowych stabilizatorów wynosi 1,5...2,2 V.
Prąd pinu masy standardowego stabilizatora jest bardzo niski (LM309 może dostarczyć do 1 A prądu do obciążenia pobierając mniej niż 10 mA prądu pinu masy). Powodem tego jest fakt, że prąd sterujący jest równy prądowi obciążenia podzielonemu przez wzmocnienie urządzenia przejściowego. W standardowym stabilizatorze element przejściowy złożony jest z pojedynczego tranzystora PNP i dwóch tranzystorów NPN w układzie Darlingtona, co daje niezwykle wysokie wzmocnienie prądowe (b > 300). Rezultatem zastosowania układu o tak wysokim wzmocnieniu jest bardzo mały prąd potrzebny do sterowania bazy tranzystora, co skutkuje mniejszym prądem spływającym do masy. Spośród trzech wymienionych wcześniej topologii stabilizator o standardowej topologii charakteryzuje się najniższym prądem pinu masy.
Stabilizator LDO
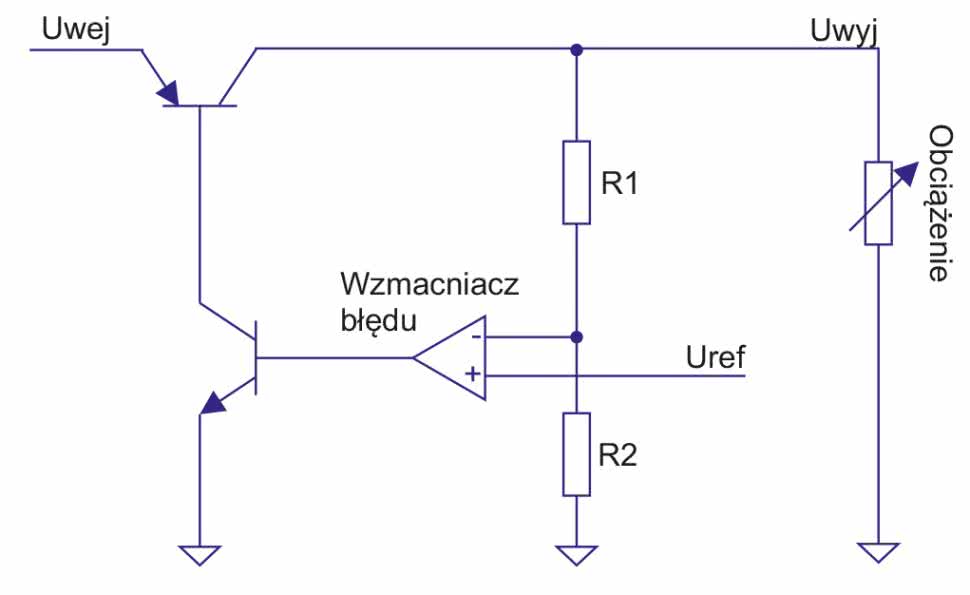
Stabilizator low-dropout (LDO), czyli o niskim spadku napięcia, różni się od standardowego stabilizatora tym, że układ przejściowy zawiera tylko jeden tranzystor PNP (rysunek 3). Przekłada się to na zmniejszenie minimalnego spadku napięcia, potrzebnego do stabilizacji układu, ale także zwiększa prąd sterowania tranzystora przejściowego, co owocuje zwiększeniem prądu pinu masy stabilizatora. Minimalny spadek napięcia VD dla stabilizatora LDO równy jest napięciu kolektor-emiter zastosowanego tranzystora, jak pokazano na równaniu (2):
VD(MIN) = VCE (2)
Dla typowego układu LDO napięcie to wynosi zwykle około 0,7...0,8 V przy pełnym prądzie wyjściowym. Minimalny spadek napięcia jest bezpośrednio związany z prądem obciążenia, co oznacza, że przy bardzo niskich wartościach prądu obciążenia napięcie zaniku może wynosić zaledwie 50 mV. Stabilizator LDO ma najniższą (najlepszą) specyfikację spadku napięcia spośród trzech opisanych tutaj typów stabilizatorów.
Dzięki bardzo niskiemu spadkowi napięcia, element ten charakteryzuje się również najwyższą sprawnością, spośród wszystkich stabilizatorów liniowych. Maksymalizuje wykorzystanie dostępnego napięcia wejściowego i może działać z większą wydajnością. Gwałtowny wzrost systemów konsumenckich, zasilanych z baterii, przyczynił się do rozwoju stabilizatorów LDO.
Prąd pinu masy, analogicznie jak w przypadku standardowego stabilizatora, równy jest w przybliżeniu prądowi obciążenia podzielonemu przez wzmocnienie pojedynczego tranzystora PNP. W związku z tym prąd pinu masy w LDO jest najwyższym z trzech omówionych typów. Na przykład stabilizator LP2953 ma prąd znamionowy równy 250 mA. Prąd, jaki w takim przypadku płynie do masy wynosi maksymalnie 28 mA, co oznacza, że wzmocnienie tranzystora przejściowego w układzie wynosi około 9 lub więcej. Dla LM2940 (który ma wydajność prądową do 1 A) prąd masy to około 45 mA, co daje wzmocnienie prądowe w wysokości 22 dla prądu znamionowego tranzystora przejściowego. Jak widać wartości te są około 10 lub więcej razy mniejsze niż dla stabilizatora o standardowej topologii.
Stabilizator quasi-LDO
Odmianą standardowego stabilizatora jest tak zwany quasi-LDO. Zawiera parę tranzystorów – NPN oraz PNP - jako układ przejściowy (rysunek 4).

Minimalny spadek napięcia dla stabilizatora quasi-LDO do utrzymania stabilizacji opisany jest równaniem (3):
VD(MIN) = VBE + VCE (3)
Dla prądu znamionowego minimalny spadek napięcia na stabilizatorze quasi-LDO wynosi nie więcej niż 1,5 V. Parametr ten jest zależny od temperatury i prądu obciążenia, ale realnie nie schodzi poniżej 0,9 V, nawet dla najbardziej mikrych obciążeń. Pobór prądu przez sam stabilizator (prąd pinu masy), to w tym przypadku wartości osiągane przez elementy quasi-LDO są podobne do prądów pobieranych przez stabilizatory o standardowej topologii i nie przekraczają zazwyczaj 10 mA dla maksymalnego prądu znamionowego, co sprawia, że elementy te są dobrym kompromisem pomiędzy niskim spadkiem napięcia i małym prądem pinu masy układu.
Wybór optymalnego stabilizatora do układu
Aby zaprojektować optymalny stopień zasilania dla dowolnego układu, trzeba dobrać właściwy stabilizator. Jego wybór podyktowany jest szeregiem parametrów takich jak:
- Maksymalny prąd obciążenia,
- Rodzaj źródła napięcia wejściowego (akumulator czy zasilanie prądem przemiennym z sieci),
- Wymagana dokładność napięcia wyjściowego (tolerancja),
- Prąd spoczynkowy (na biegu jałowym – przy zerowym poborze prądu przez obciążenie),
- Konieczność posiadania dodatkowych funkcji specjalnych (wyłącznik, flaga błędu itp.).
Obciążenie maksymalne. Należy dokładnie określić maksymalny prąd wymagany w danej aplikacji przy wyborze scalonego regulatora. Specyfikacja maksymalnego prądu obciążenia dla scalonego stabilizatora może być zdefiniowana jako pojedyncza wartość lub wartość zależna od innych parametrów, różnicy napięć, temperatury otoczenia etc. Wybrany stabilizator musi zapewnić wystarczający prąd dla zadanego obciążenia w najgorszych, możliwych w projekcie warunkach. Zagwarantuje to niezawodność systemu w dowolnych warunkach pracy, w jakich może znaleźć się urządzenie.
Źródło zasilania. Dostępne źródło zasilania (np. akumulator lub prąd przemienny) będzie silnie wpływać na rodzaj wybranego stabilizatora. W zależności od tego, czy nasze urządzenie zasilane jest z baterii czy z zasilacza sieciowego. W przypadku baterii rekomendowanie jest wyboru stabilizatora LDO z uwagi na fakt, że lepiej i efektywniej wykorzystują one dostępną energię i mogą działać dłużej w czasie rozładowywania ogniwa. Na przykład akumulator kwasowo-ołowiowy o napięciu nominalnym 6 V ma napięcie na zaciskach równe około 6,3 V przy pełnym naładowaniu i około 5,5 V końcowym momencie rozładowania. Jeśli projektant chce uzyskać stabilizowane zasilanie 5 V z tego akumulatora, wymagany jest stabilizator LDO, ponieważ dostępne jest tylko około 0,5 do 1,3 V zapasu napięcia.
Z kolei jeśli źródło prądu stałego w systemie pochodzi z prostowanego napięcia przemiennego, spadek napięcia stabilizatora nie jest tak krytyczny, ponieważ dodatkowe napięcie wejściowe na stabilizatorze jest łatwe do uzyskania przez zwiększenie napięcia wtórnego transformatora. W takich wypadkach dostatecznie dobrze sprawi się stabilizator o standardowej topologii, jednak w niektórych przypadkach inne cechy i lepsza precyzja napięcia wyjściowego niektórych nowych regulatorów LDO nadal czyni je najlepszym wyborem.
Precyzja stabilizacji napięcia. Typowe stabilizatory liniowe zazwyczaj charakteryzują się dokładnością stabilizacji napięcia wyjściowego, która gwarantuje precyzję w granicach 5% wartości nominalnej. Ten poziom dokładności jest odpowiedni do większości zastosowań.
Istnieje jednakże wiele nowych układów, które mają niższą tolerancję (lepsza niż 2% jest już powszechna), osiągnięte dzięki zastosowaniu procesu laserowego trymowania elementów. Polega to na laserowym przycinaniu elementów w stabilizatorze (zazwyczaj oporników) na etapie produkcji, aby uzyskać wyższą precyzję pętli sterującej.
Ponadto wiele współczesnych stabilizatorów ma dokładniejsze specyfikacje wyjściowe, które obejmują zachowanie w funkcji temperatury pracy i dla różnego obciążenia.
Prąd spoczynkowy. Jest to prąd, który dany element pobiera ze źródła zasilania na biegu jałowym (albo w momencie, gdy stabilizator jest wyłączony, albo gdy nie dostarcza on znacznych ilości prądu do obciążenia) może mieć krytyczne znaczenie w aplikacjach zasilanych bateryjnie.
W niektórych aplikacjach stabilizator może spędzić większość czasu w trybie gotowości lub stand-by, na przykład gdy dostarczać ma prąd do obciążenia tylko w przypadku awarii głównego stabilizatora. W takich rozwiązaniach prąd spoczynkowy określa żywotność baterii.
Wiele nowych stabilizatorów LDO jest zoptymalizowanych pod kątem niskiego poboru prądu spoczynkowego (np. 75...150 mA) i zapewniają znaczną poprawę w porównaniu do typowych stabilizatorów, które pobierają aż kilka miliamperów, nawet gdy są wyłączone.
Dodatkowe funkcje. Wiele stabilizatorów LDO oferuje dodatkowe funkcje, które pozwalają projektantowi na zwiększenie elastyczności układu. Są to m.in. piny wyłączające układ, umożliwiające sterowanie stabilizatorem za pomocą bramki logicznej lub mikrokontrolera. Układy te oferują również ochronę przed przepięciami, także tymi, które pojawiają się po wtórnej stronie stabilizatora. Funkcje takie posiadają szczególnie stabilizatory stosowane w aplikacjach motoryzacyjnych i do sterowania silnikami elektrycznymi.
Stabilizatory oferują również zabezpieczenie przed odwrotnie podłączonym napięciem wejściowym, co zapobiega uszkodzeniu elementu, gdy napięcie wejściowe jest niepoprawnie podłączone; jest to niezbędne w aplikacjach, w których użytkownik może przypadkowo odwróć biegunowość baterii.
Niezwykle istotnym dodatkowym elementem jest również tzw. flaga błędu, czyli dodatkowe wyjście cyfrowe ze stabilizatora, które służy do ostrzegania obwodów monitorowania lub sterowania, że wyjście np. spadło 5% poniżej swojej wartości nominalnej. Ma to ostrzec kontroler, że napięcie zasilania jest wystarczająco niskie, aby spowodować np. niepoprawnej działanie procesora lub powiązanych obwodów logicznych.
Zabezpieczenia układów
Liniowe stabilizatory napięcia zawierają liczne, wbudowane obwody zabezpieczające, które sprawiają, że są praktycznie odporne na uszkodzenia wynikające z wielu zagrożeń. Główne zabezpieczenia w stabilizatorach to:
- Zabezpieczenie termiczne,
- Zabezpieczenie nadprądowe.
Te dwa obwody występują w niemalże każdym stabilizatorze liniowym. Połączone są ze sobą w pewnej określonej kolejności, zapewniającej hierarchię sterowania wyjściem. Prezentuje się ona następująco (od najważniejszego, do najmniej ważnego sygnału sterowania wyjściem):
- Zabezpieczenie termiczne,
- Ograniczenie prądu wyjściowego,
- Pętla kontroli napięcia wyjściowego.
Hierarchia oznacza, że stabilizator liniowy zwykle będzie próbował działać w trybie stałego napięcia, w którym wzmacniacz błędu napięcia reguluje napięcie wyjściowe do nominalnej wartości. Zakłada się jednak, że zarówno prąd obciążenia, jak i temperatura złącza są poniżej ich dopuszczalnych wartości progowych.
Jeśli prąd obciążenia wzrośnie do wartości granicznej, obwód ograniczający prąd przejmie kontrolę nad układem i wymusi prąd obciążenia na poziomie granicznej wartości. Wzmacniacz błędu napięcia może wznowić kontrolę tylko wtedy, gdy prąd jest wystarczająco niski, aby spowodować zwolnienie kontroli przez obwody ograniczające prąd.
Analogicznie będzie w przypadku wzrostu temperatury (niezależnie od przyczyny). Przekroczenie progu spowoduje odcięcie sterowania od tranzystora mocy, redukując w ten sposób prąd obciążenia i ilość traconej mocy.
Warto pamiętać, że stabilizator utrzymuje stałe napięcie wyjściowe tylko gdy jest w trybie stałego napięcia i żadne zabezpieczenie nie jest uruchomione. Przy ograniczeniu prądu napięcie wyjściowe będzie mniejsze, zgodnie z wymaganiami, aby utrzymać prąd obciążenia na wartości granicznej. W przypadku ograniczenia termicznego napięcie wyjściowe spada, a prąd obciążenia może zmniejszyć się do dowolnej wartości (w tym zero). Nie obowiązują tutaj specyfikacje wydajności gdy element pracuje w trybie wyłączania termicznego – poza swoją specyfikacją.
Wskazówki dotyczące stosowania stabilizatorów liniowych
Wydaje się, że aplikacja liniowych stabilizatorów napięcia w układach zasilania jest prosta – nic bardziej mylnego. Samo podłączenie elementu w układzie czy jego konfiguracja w przypadku wersji regulowanej, mogą być proste ale istnieje wiele niuansów, które mają ogromny wpływ na jakość działania naszego urządzenia.
Kondensator wyjściowy. Pojemność zastosowana w regulatorze liniowym wpływa na stabilność działania układu. Może powodować, że wyjście będzie oscylować, jeśli element ten nie zostanie poprawnie dobrany. Podczas doboru kondensatora rozważyć należy jego parametry pasożytnicze, głównie szeregową rezystancję zastępczą (ESR) oraz efektywną indukcyjność szeregowa (ESL). Na rysunku 5 pokazano schemat rzeczywistego kondensatora z zaznaczeniem ESR i ESL. Parametr ESL ogranicza efektywność kondensatorów filtrujących przy wysokich częstotliwościach i jest głównym powodem dlaczego kondensatory elektrolityczne muszą być dodatkowo odsprzęgane przez kondensatory o mniejszej pojemności z dielektrykami, które dobrze radzą sobie w zakresie RF. Jest to szczególnie istotne w przetwornicach impulsowych, ale także w przypadku układów liniowych ma ogromne znaczenie.

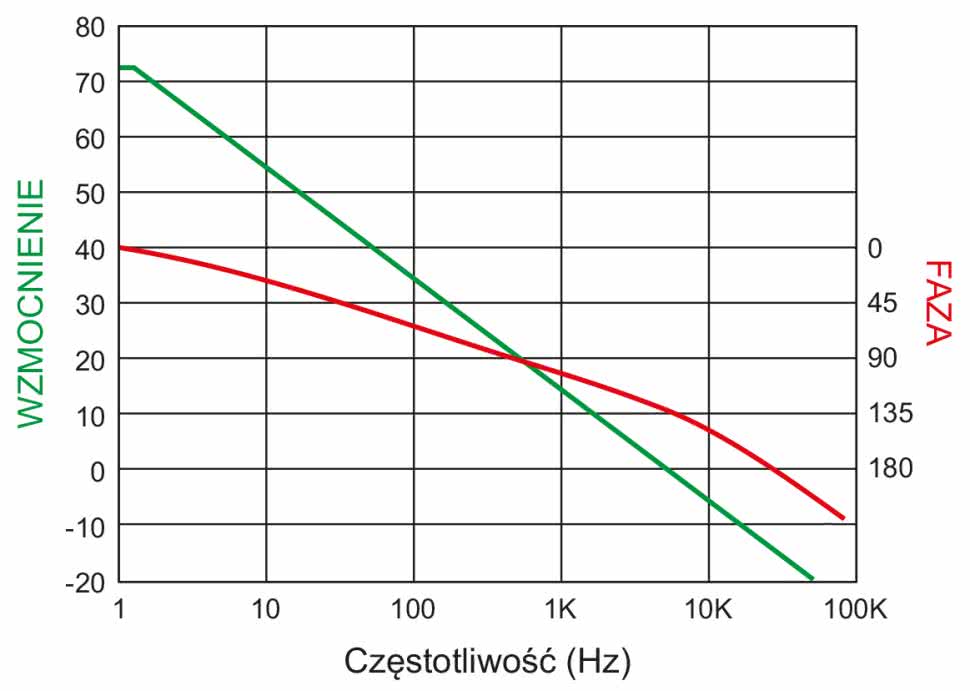
Odpowiedź pętli sprzężenia. Na rysunku 6 pokazano typową odpowiedź pętli sterującej stabilizatorem liniowym. Na wykresie pokazano krzywą wzmocnienia (zielona linia) i fazy (linia czerwona). Należy pamiętać, że dla stabilnej pętli wzmocnienie musi wcześniej przekroczyć wartość poniżej 0 dB niż kąt fazowy sięgnie 180°. Osiągnięcie kąta fazowego równego 180° oznacza, że sygnał jest efektywnie dodatnim sprzężeniem zwrotnym, co przekłada się na wystąpienie oscylacji.
Dla uzyskania stabilnego układu wymaga się marginesu fazy na poziomie co najmniej 45°, co oznacza, ze 0 dB na charakterystyce częstotliwościowej powinno być osiągnięte zanim kąt fazowy osiągnie 135°.
W liniowym stabilizatorze LDO kondensator wyjściowy jest potrzebny do wymuszenia spadku krzywej wzmocnienia wystarczająco szybko, aby spełnić wymagania dotyczące stabilności (standardowy stabilizator jest zazwyczaj wewnętrznie skompensowany i zwykle nie potrzebuje kondensatora wyjściowego dla stabilności). ESR kondensatora wyjściowego przesuwa punkt zero w krzywej wzmocnienia pokazanej na rysunku 6. Przesunięcie punktu przejścia przez 0 dB redukuje margines fazy wpływający na stabilność układu. Jeśli ESR jest wystarczająco duża to zero może się przesunąć na tyle, by spowodować niestabilność regulatora.
W większości kart katalogowych stabilizatorów liniowych LDO znajdziemy zakres ESR kondensatora wyjściowego (lub maksymalną dopuszczalną wartość), który gwarantuje stabilne działanie układu w danej aplikacji.
Zależność temperaturowa ESR. Po ustaleniu konieczności kontroli ESR kondensatora wyjściowego dla stabilizatora LDO, trzeba zwrócić uwagę na jedną bardzo ważna rzecz: ESR nie jest stały z temperaturą. Rysunek 7 pokazuje zależność ESR w funkcji temperatury dla typowego aluminiowego kondensatora elektrolitycznego.

Najważniejszym punktem do zauważenia, jest szybkość wzrostu ESR w niskich temperaturach. W przypadkach, w których stabilizator LDO musi pracować w temperaturze poniżej –10°C, czasami nie można dobrać odpowiedniego kondensatora, który może utrzymać ESR w dopuszczalnym zakresie w tej temperaturze. Ważne jest również, aby kondensator był przeznaczony do pracy w pełnym zakresie temperatur: niektóre kondensatory elektrolityczne nie nadają się do użytku w temperaturze poniżej –20°C, ponieważ ich elektrolit zamarza.
Jeżeli stabilizator ma określony tylko maksymalny limit ESR, którego nie może przekroczyć, to kondensator elektrolityczny można połączyć równolegle z kondensatorem tantalowym, który ma znacznie niższy ESR. Gdy dwa kondensatory są połączone równoległe, efektywny ESR jest obliczany jak zwykłe, połączone rezystancje, co oznacza, że dodatkowy kondensator o niskim ESR pomoże zredukować wpływ wzrostu ESR w niskiej temperaturze (rysunek 7). Pojemność dodatkowego kondensatora tantalowego powinna wynosić około 20% pojemności kondensatora aluminiowego. Jeśli stabilizator ma zarówno maksymalny, jak i minimalny próg (ESR musi pozostać w określonym zakresie), może być konieczne dodanie rezystora w szeregu z kondensatorem o niskim ESR.
Dokładność stabilizacji napięcia na obciążeniu
Stabilizacja napięcia na obciążeniu, jaką może zapewnić katalogowo stabilizator liniowy, jest często znacznie lepsza niż w rzeczywistej aplikacji ze względu m.in. na spadki napięcia występujące na ścieżkach prądowych. Aby zrozumieć, jak i dlaczego tak się dzieje, przyjrzyjmy się przykładom poprawnie i niepoprawnie zrealizowanych obwodów.
Stabilizatory nieregulowane
Typowy układ pokazany na rysunku 8 posiada popularny trójpinowy stabilizator liniowy o stałym napięciu wyjściowym. Z punktu widzenia użytkownika, najważniejsze jest napięcie na obciążeniu, ale dla stabilizatora ważne jest napięcie, jakie znajduje się pomiędzy jego pinem wyjściowym, a pinem masy. Spadki napięcia na ścieżkach doprowadzających prąd do obciążenia nie są uwzględnione i zmniejszają napięcie, jakie efektywnie przyłożone jest do obciążenia.
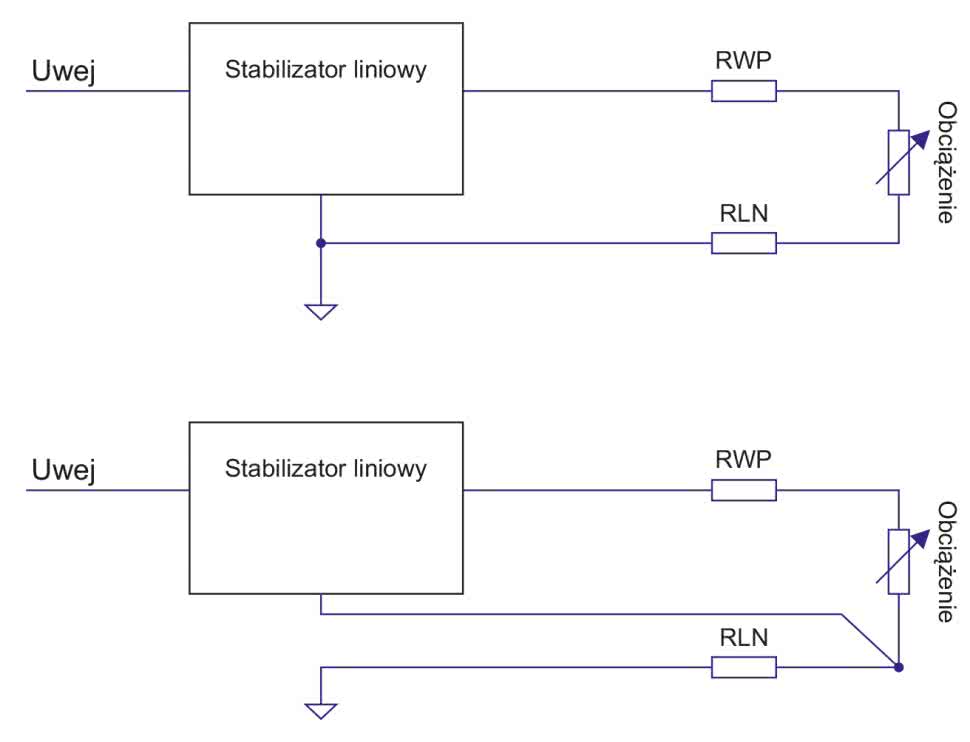
W typowej aplikacji napięcie na obciążeniu (VLOAD) jest mniejsze od napięcia wyjściowego z stabilizatora (VOUT) o spadek napięcia ma ścieżkach o rezystancji RWP i RLN. Efektywne napięcie na obciążeniu zapisano równaniem (4):
VLOAD = VOUT – (RWP + RLN) ILOAD (4)
gdzie ILOAD to prąd obciążenia.
Jeśli poprowadzimy ścieżki w prawidłowy sposób, tak jak pokazano na dolnym schemacie z rysunku 8 to napięcie na obciążeniu wyniesie:
VLOAD = ROUT – RWP × ILOAD (5)
Przy typowych parametrach PCB, ścieżka o szerokości 16 milsów i długości 100 mm ma rezystancję około 122 mV. Na dwóch takich ścieżkach (linia zasilania oraz masy) spadek napięcia wynieść może łącznie 366 mV. Dla nominalnego napięcia zasilania 3,3 V jest to 11% błędu napięcia. Oczywiście, jest to mocno przesadzony przypadek, jednak nawet ścieżka o połowę krótsza i pięć razy grubsza wprowadzić może błąd na poziomie 1%, co przy współczesnych stabilizatorach oferujących dokładność stabilizacji napięcia na poziomie 2% i lepiej jest istotną wartością.
Tego rodzaju błąd można zredukować na dwa sposoby:
- Połączyć pin masy bezpośrednio z pinem masy obciążenia, pomijając ścieżkę wysokoprądową, tak aby stabilizator miał swoją własną ścieżkę masy do precyzyjnego pomiaru napięcia odniesienia. Pinem masy stabilizatora płynie niewielki prąd – kilka, kilkanaście miliamperów lub mniej, więc spadek napięcie nie jest istotny.
- Zminimalizować spadek napięcia na ścieżkach zasilających, maksymalizując grubość ścieżek oraz redukując maksymalnie ich długość, na przykład umieszczając stabilizator tak blisko obciążenia, jak to tylko możliwe.
Regulowane stabilizatory
W przypadku stabilizatorów o regulowanym napięciu wyjściowym sprawę komplikuje dodatkowy obwód – dzielnik napięcia – który umożliwia programowanie napięcia wyjściowego. W przypadku stabilizatorów tego rodzaju, mamy do czynienia z dwoma ich typami – z trzema wyprowadzeniami, podobnie jak w przypadku stabilizatorów nieregulowanych i z układami z dedykowanym pinem masy i pinem wejścia z dzielnika napięcia. Każda z tych topologii ma nieco inne implikacje podczas stosowania w układzie.
Stabilizatory trójpinowe
W przypadku regulowanego stabilizatora napięcia o trzech pinach, napięcie odniesienia przykłada się między pinem wyjściowym a pinem dedykowanym do sterowania (rysunek 9).
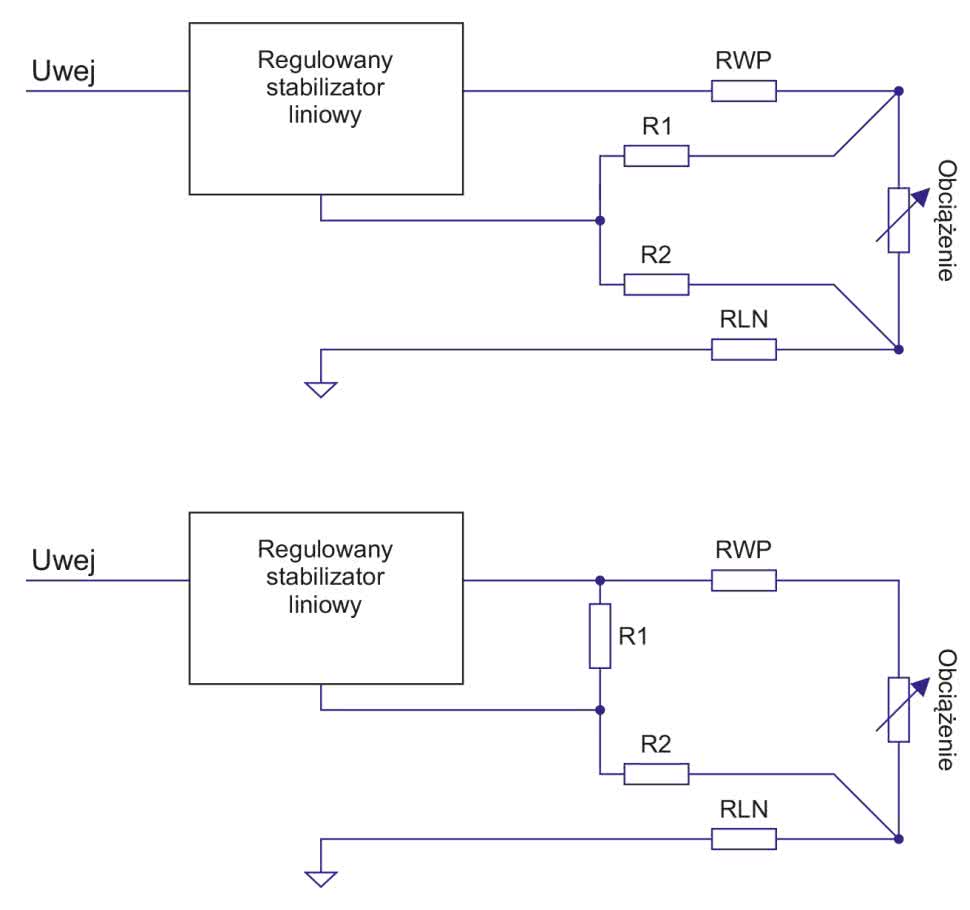
W rekomendowanym obwodzie napięcie jakie pojawia się na obciążeniu równe jest nominalnemu napięciu wyjściowemu pomniejszonemu o spadek na dodatniej gałęzi zasilania, który wynika z jej rezystancji, co pokazano na równaniu (6).
VLOAD = VREF (R1 + R2) / R1 – RWP * IL (6)
Tak jak w przypadku nieregulowanego stabilizatora, największą precyzję uzyskuje się dołączając masę dzielnika bezpośrednio do masy, eliminując spadek napięcia na ścieżce masy spowodowanej dużym prądem, płynącym do obciążenia, Intuicyjnie wydaje się słuszne, że aby uzyskać dodatkową poprawę precyzji, należy dołączyć dodatnią gałąź dzielnika napięcia bezpośrednio do dodatniego zacisku obciążenia. To założenie jest jednak błędne.
Napięcie na pinie odniesienia służy do wymuszenia stałego prądu płynącego przez R1 i R2, a dokładność napięcia wyjściowego jest bezpośrednio związana z dokładnością tego prądu. Jeśli opornik R1 jest podłączony do dodatniego zacisku obciążenia, spadek napięcia na rezystancji ścieżki dostarczającej napięcie jest odejmowany od napięcia VREF, zmniejszając prąd płynący przez dzielnik. Rezultatem tego jest zwiększony błąd napięcia, które na obciążeniu wynosi w takim wypadku:
VLOAD = VREF (R1 + R2) / R1 – RWP * IL* (R1 + R2) / R1 (7)
W sytuacji, gdy dzielnik napięcia odniesienia jest podłączony bezpośrednio do obciążenia, zmniejsza się prąd dzielnika, co efektywnie zmniejsza napięcie na obciążeniu – błąd wynikający ze spadku napięcia na ścieżce doprowadzającej prąd do obciążenia jest dodatkowo mnożony przez wzmocnienie wynikające z dzielnika napięcia.
Stabilizatory wielopinowe
Regulowane stabilizatory, które nie są ograniczone tylko do trzech pinów, mają tę zaletę, że pin masy pozwala wyeliminować błąd napięcia wyjściowego spowodowany spadkiem napięcia na obu gałęziach prądowych – dodatniej i ujemnej (masy). Na rysunku 10 pokazano niepoprawny schemat (u góry) i rekomendowany (na dole) sposób podłączania dzielnika napięcia do obciążenia w przypadku, gdy zastosowany stabilizator liniowy posiada dedykowane wejście dla napięcia sterującego/zewnętrznego dzielnika napięcia.
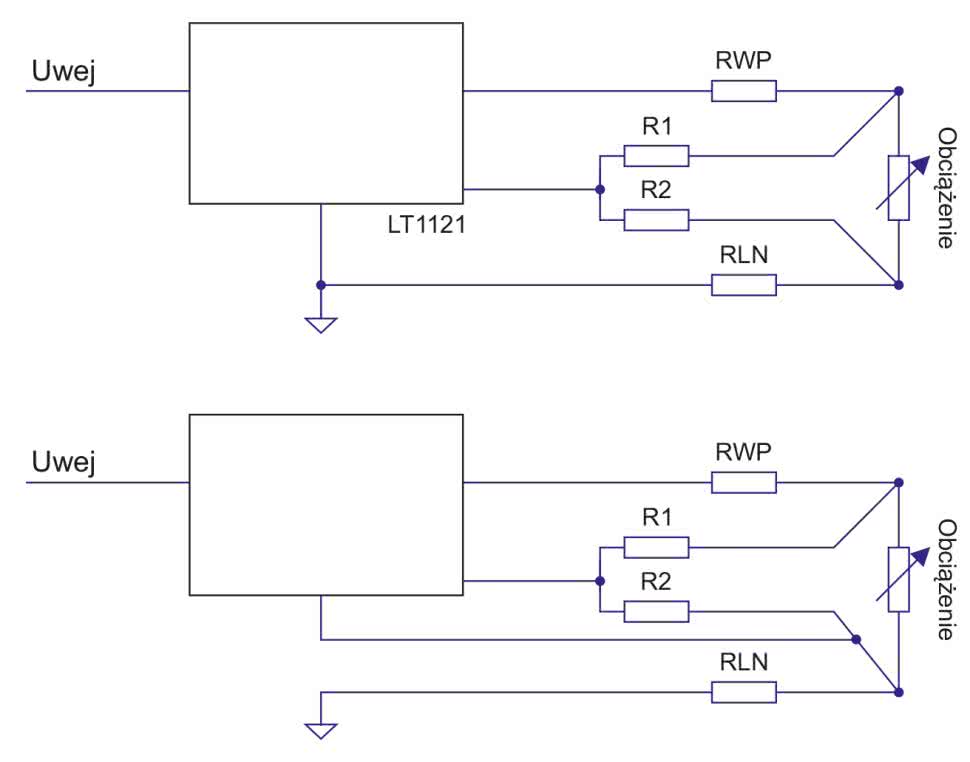
Należy pamiętać, że w tego typu układach napięcie odniesienia jest mierzone względem masy, w przeciwieństwie do stabilizatorów z trzema pinami, które nie posiadają osobnego pinu masy. Błędy napięcia w takim układzie można wyeliminować poprzez podłączenie dzielnika napięcia bezpośrednio do obciążenia, omijając ścieżki prądowe.
W ten sposób realizujemy zdalny pomiar napięcia na obciążeniu. Co ważne, pin masy stabilizatora musi także być dołączony do masy obciążenia. Podłączając osobnymi ścieżkami pin masy stabilizatora do masy obciążenia pamiętajmy, że ścieżką tą płynąć może zauważalny prąd (cały prąd jaki pobiera sam stabilizator, dla LDO może to być nawet do 45 mA) i konieczne jest zagwarantowanie pomijalnego spadku napięcia na tej ścieżce. W ten sposób stabilizowane napięcie na obciążeniu równe będzie:
VLOAD = VREF (R1 + R2) / R2 (8)
Jeśli pin masy stabilizatora i dolny punkt pomiarowy R2 są od siebie oddzielone, napięcie pomiędzy tymi dwoma punktami mnoży się przez stosunek (1 + R1 / R2) i pojawia się jako błąd napięcia VLOAD. Ponieważ napięcie błędu zależy od prądu obciążenia, napięcie VLOAD zmieniać się będzie również wraz z prądem obciążenia, co powoduje słabą stabilizację napięcia na obciążeniu, jak pokazano na równaniu 9:
VLOAD = VREF (R1 + R2) / R2 – ILOAD * (R1 + R2) / R2 (9)
„Marchewka” w charakterystyce LDO
Wiele (ale nie wszystkie) stabilizatorów LDO ma charakterystykę w prądzie pinu masy, zwaną potocznie „marchewką". Marchewka to punkt w charakterystyce prądu pinu masy, w którym wartość prądu rośnie wraz ze spadkiem napięcia wejściowego (rysunek 11). Wzmacniacz błędu w stabilizatorze zawsze próbuje wymusić na wyjściu odpowiednie napięcie poprzez kontrolę prądu płynącego przez układ przejściowy (w tym przypadku pojedynczy tranzystor PNP, gdyż mamy do czynienia z układem LDO). Gdy napięcie wejściowe zmniejsza się (a napięcie na tranzystorze przejściowym maleje), wzmocnienie prądu tranzystora PNP zaczyna spadać. Aby utrzymać prawidłowe napięcie wyjściowe, wzmacniacz błędu musi mocniej wysterować bramkę tranzystora, aby dostarczyć ten sam prąd do obciążenia. Prąd bazy PNP opuszcza stabilizator jako prąd pinu masy.
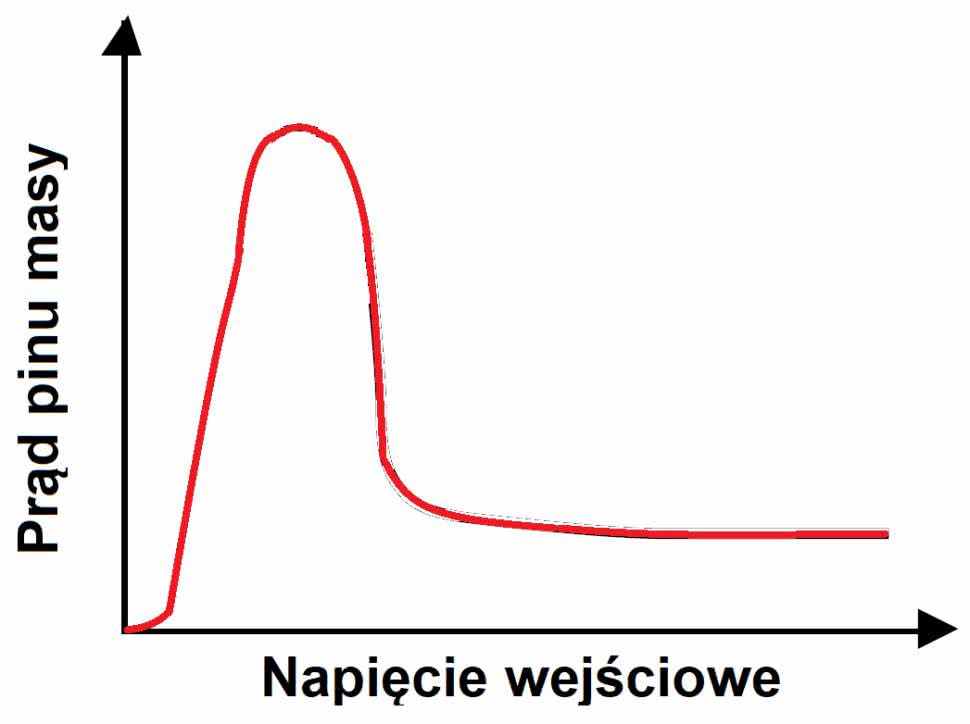
W miarę dalszego spadku napięcia wejściowego regulator zbliża się do zaniku napięcia, gdy osiągnięty zostanie krytyczny poziom napięcia wejściowego – nominalne napięcie wyjściowe plus minimalny spadek napięcia na elemencie przejściowym. W takiej sytuacji wzmacniacz błędu steruje bazą PNP z maksymalnym prądem (jest to szczyt 'marchewki' na charakterystyce widocznej na rysunku 11). Wartość prądu w tym punkcie może być 3 lub 4 razy większa niż maksymalny prąd pinu masy, który jest wymagany podczas normalnej pracy nawet z największym obciążeniem. Zachowanie to uznaje się za niepożądaną cechę stabilizatora LDO, ponieważ dodatkowy prąd pinu masy musi być dostarczany do układu przez źródło, ale nie zasila obciążenia, tylko jest tracony na elemencie w postaci ciepła. W nowszych stabilizatorach LDO wbudowane są obwody, dedykowane zapobieganiu występowania tego skoku prądu.
Zachowanie to uznaje się za niepożądaną cechę stabilizatora LDO, ponieważ dodatkowy prąd pinu masy musi być dostarczany do układu przez źródło, ale nie zasila obciążenia tylko jest tracony na elemencie w postaci ciepła. W nowszych stabilizatorach LDO wbudowane są obwody, dedykowane do zapobiegania występowania tego skoku prądu pinu masy.
Podsumowanie
Stabilizatory liniowe są nieodzownymi elementami w sekcjach zasilania nowoczesnych urządzeń. Ich aplikacje nie zawsze są tak trywialne, jak może się wydawać ale jeśli pozna się ich zasadę działania i podstawy stosowania w obwodach zasilania, które opisano powyżej, można zbudować energooszczędne i precyzyjne zasilacze prądu stałego.
Nikodem Czechowski, EP