 Zaloguj
Zaloguj




 Spis treści
Spis treści

Usuwanie składowej stałej
Jak zauważyliśmy już przy analizie na rysunku 8, nasz sygnał z mikrofonu nie oscyluje wokół 0, co oznacza, że znajduje się w nim pewna składowa stała. Jest ona równa napięciu na dzielniku, złożonym z oporników R3 i R4. Istnieje kilka sposobów, aby ją usunąć. Możemy ustalić stałą, którą będziemy odejmować od pomiarów, albo mierzyć napięcie na dzielniku za pomocą drugiego kanału przetwornika. Zastosujemy jednak filtr górnoprzepustowy o nieskończonej odpowiedzi impulsowej: NOI. Często spotyka się także oznaczenie IIR, co pochodzi od angielskiego Infinite Impulse Response [4]. Jego transmitancję wylicza się wzorem:
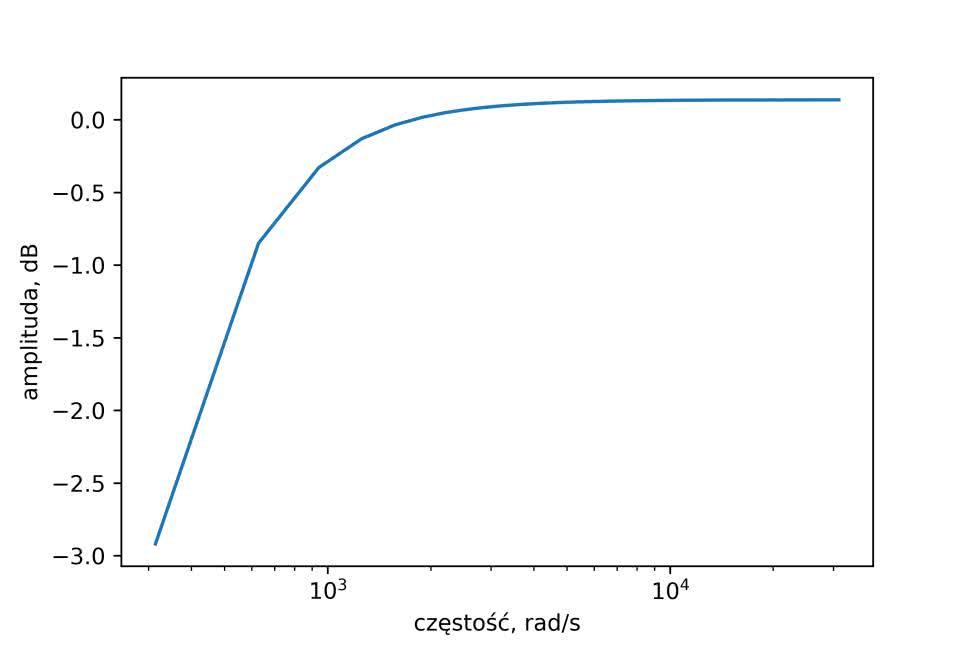
Taki filtr ma interesującą charakterystykę amplitudową, która wynosi 0 dla składowej stałej, a następnie szybko rośnie. Wyrysujemy ją w notatniku Jupyter. Odpowiedzialny za to kod pokazany jest na listingu 3.
01 α = 31/32
02 H = signal.TransferFunction([1, -1], [1, -α], dt=1e-4)
03 w, mag, phase = H.bode()
04 axi = plt.semilogx(w, mag)
05 plt.xlabel("częstość, rad/s")
06 plt.ylabel("amplituda, dB")
Na początku przyjmujemy współczynnik a równy 31/32. Warto tu zwrócić uwagę, że język Python pozwala nam używać greckich liter jako nazw zmiennych. Można dyskutować, czy jest to dobra praktyka, ale jest to dopuszczalne.
Korzystając z biblioteki Scipy, definiujemy transmitancję H. W formie wektorów podajemy współczynniki wielomianów, składających się na jej licznik oraz mianownik. Ostatni parametr to okres próbkowania. Podajemy tu 100 μs, co odpowiada częstotliwości 10 kHz, z którą pracuje nasz przetwornik. Na końcu generujemy i wyrysowujemy charakterystykę amplitudową (zwaną także charakterystyką Bodego). Uzyskany wykres pokazuje rysunek 9.
Przed przygotowaniem realizacji filtra w strukturze układu FPGA najpierw pokażmy jego transmitancję w formie graficznej. Na rysunku 10 widzimy jedną z wielu możliwych realizacji. X symbolizuje wejście, a Y wyjście.
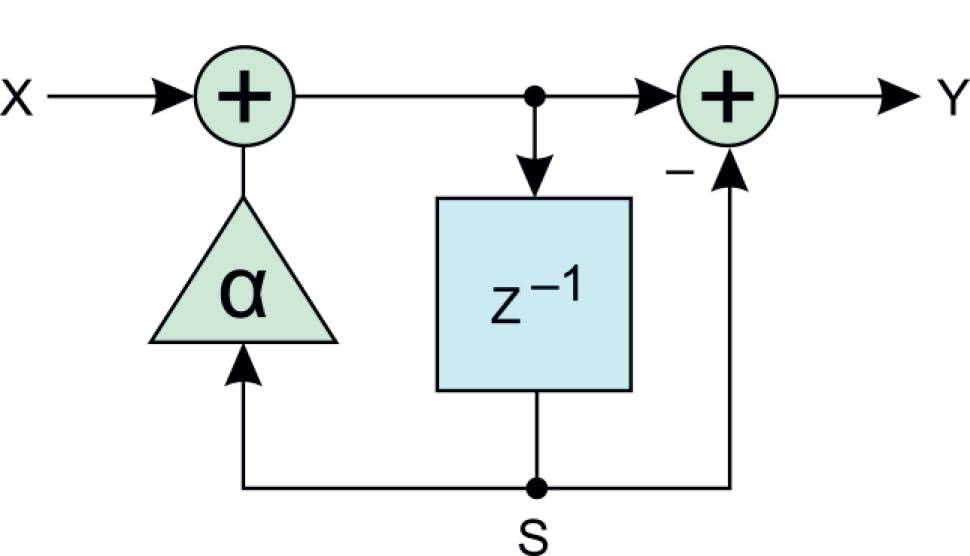
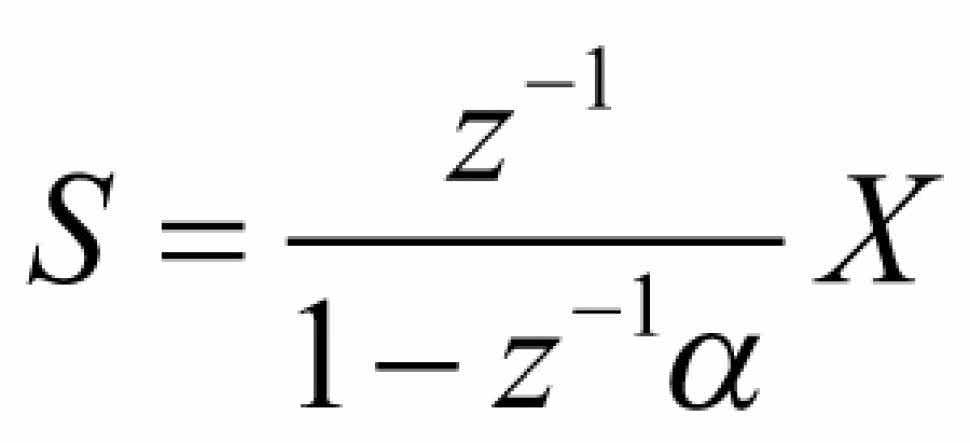
Blok z–1 oznacza operację opóźnienia o jeden krok. Możemy łatwo pokazać, że nasz schemat naprawdę odpowiada transmitancji H. Najpierw rozpiszmy wartość w punkcie oznaczonym jako S:
![]()
Po przeniesieniu S na jedną stronę równania i uporządkowaniu współczynników otrzymamy:
Teraz możemy rozpisać równanie na wyjście:
![]()
Podstawiając wcześniej obliczoną wartość S, otrzymujemy:

Stąd dzieląc przez X, otrzymujemy naszą wyjściową transmitancję:

Przekładając schemat z rysunku 10 na coś, co można zaimplementować w strukturze układu FPGA, otrzymujemy bardziej złożony schemat pokazany na rysunku 11.
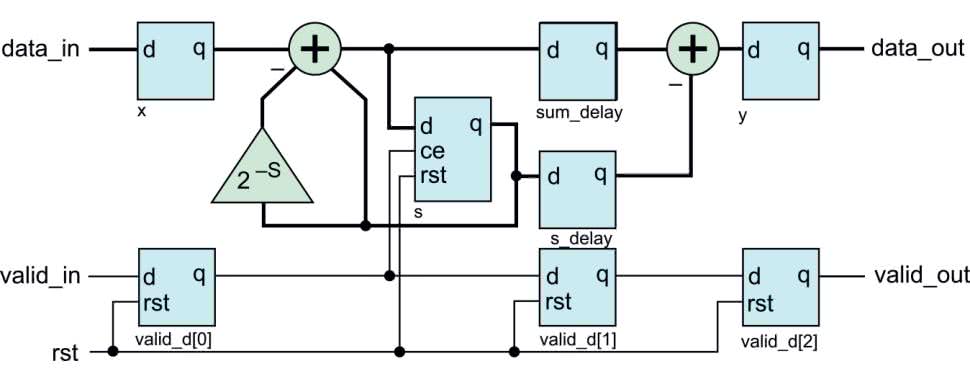
Pierwsza rzecz, która rzuca się w oczy, to znacznie większa liczba przerzutników. Zostały one dodane w celu uzyskania wyższej częstotliwości pracy (co prawdopodobnie nie jest potrzebne w naszym, taktowanym z niską częstotliwością 8 MHz projekcie). Zwracam uwagę, że jedynym przerzutnikiem z wejściem ce jest ten oznaczony jako S. Jest on włączany przez sygnał valid. To główna różnica pomiędzy opóźnieniami wynikającymi z logiki projektu (z–1) a tymi „technicznymi”, ułatwiającymi realizację w krzemie. W punkcie S ma zostać zapisana ostatnia „poprawna” (valid) wartość.
Usuwanie składowej stałej realizowane jest w trzech krokach. Pierwszy polega na zatrzaśnięciu wejść. Odpowiadają za to przerzutniki x i valid_d[0].
W drugim kroku przygotowujemy cząstkowe wyniki i zapisujemy je w rejestrach sum_delay i s_delay. Razem z nimi, w valid_d[1] podąża sygnał sterujący. W ostatnim etapie, w przerzutnikach y i valid_d[2] zapisujemy wyjście filtru. Warto zauważyć, że sygnał kontrolny valid niejako płynie przez filtr równolegle z danymi.
Drugi szczegół implantacyjny polega na założeniu, że współczynnik α będzie miał postać 1–2S, gdzie s jest liczbą naturalną. Pozwoli to zastąpić mnożenie za pomocą przesunięcia bitowego i odejmowania. Są to operacje dużo łatwiejsze w realizacji (w FPGA) niż mnożenie.
Musimy jeszcze zastanowić się, ile bitów musimy przeznaczyć na reprezentację stanu. W tym celu przejdźmy do opisu w dziedzinie czasu. Możemy wyrazić wartość w rejestrze s w chwili k+1 jako:
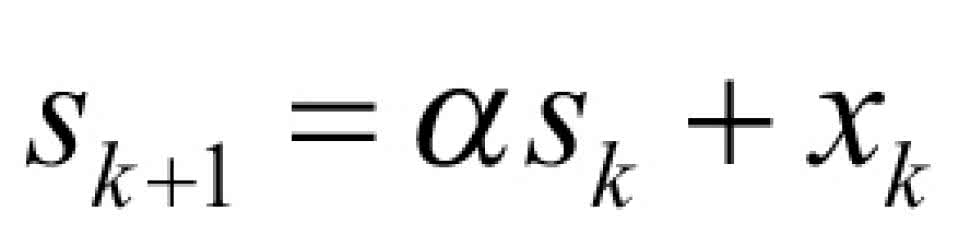
Dla danego (stałego) wejścia x po pewnym czasie stan się ustali. Oznacza to, że wartość sk+1 będzie równa sk. Możemy wtedy zapisać:
![]()
I obliczyć wartość stanu ustalonego:

Gdy podstawimy przyjętą przez nas wcześniej wartość współczynnika:
![]()
Otrzymamy zależność:
![]()
Teraz, jeżeli nasze wejście x ma długość N bitów, to do zapisania stanu s potrzebować będziemy L=N+S bitów.
Mamy już wszystkie niezbędne informacje, aby rozpocząć implementację. Kod napisany w języku SystemVerilog znajdziemy na listingu 4.
10 module dc_r #(
11 parameter N = 8,
12 parameter S = 5
13 ) (
14 StreamBus in,
15 StreamBus out
16 );
17 parameter L = N+S;
18 logic [2:0]valid_d;
19 logic signed [N:0]x;
20 logic signed [L:0]s;
21 logic signed [L:0]sum;
22 logic signed [L:0]s_delay;
23 logic signed [L:0]sum_delay;
24 logic signed [L+1:0]y;
25
26 always_ff @(posedge in.clk or negedge in.rst)
27 if (!in.rst)
28 valid_d <= ‘0;
29 else
30 valid_d <= {valid_d[1:0], in.valid};
31
32 always_ff @(posedge in.clk)
33 x <= {1’d0, in.data};
34
35 assign sum = s - (s >>> S) + x;
36
37 always_ff @(posedge in.clk or negedge in.rst)
38 if (!in.rst)
39 s <= ‘0;
40 else if (valid_d[0])
41 s <= sum[L:0];
42
43 always_ff @(posedge in.clk) begin
44 s_delay <= s;
45 sum_delay <= sum[L:0];
46 end
47
48 always_ff @(posedge in.clk)
49 y <= sum_delay – s_delay;
50
51 assign out.data = y[N-1:0];
52 assign out.valid = valid_d[2];
53 endmodule
Na początku definiujemy dwa znane nam już parametry. N oznacza liczbę bitów przeznaczonych na wejście, a s ustala wartość współczynnika a. Następnie utworzone są dwa interfejsy: wejściowy in i wyjściowy out. Dla uproszczenia nie będziemy implementować sygnału ready. W liniach 17…24 zdefiniowane zostały sygnały wykorzystywane wewnątrz modułu. Te, które przechowują liczby ze znakiem, mają dodatkowy parametr signed.
Pierwszy blok always (linie 26…30) buduje linie opóźniającą dla sygnału valid. W wierszach 32…33 zatrzaskujemy wartość wejściową w rejestrze x.
Dodatkowo, poprzez dołączenie na początek bitu równego 0, dokonujemy konwersji z liczby bez znaku do dodatniej liczby ze znakiem. Z tego powodu, mimo że wchodząca wartość jest zapisana na N bitach, nasz rejestr x musi mieć długość N+1 bitów.
Linia 35 definiuje logikę kombinacyjną, która oblicza wartość pomocniczą sum. Korzystamy tu z operatora arytmetycznego przesunięcia bitowego. W przeciwieństwie do przesunięcia logicznego, zachowuje ono znak. Różnica pomiędzy nimi została pokazana na rysunku 12.

Blok synchroniczny z linii 37…41 realizuje obsługę stanu. Wartość początkowa, ustawiana przy resecie, to 0. Natomiast wartość z sygnału sum jest zatrzaskiwana tylko wtedy, gdy (odpowiednio opóźniony) sygnał valid jest aktywny. Następnie w wierszach 43…46 wykonujemy drugi krok obliczeń. W rejestrach s_delay i sum_delay zatrzaskujemy wartości, których użyjemy do obliczeń. Wynik uzyskujemy w kroku numer trzy (48…49). Zwracam uwagę, że do zapisania różnicy dwóch liczb ze znakiem potrzebujemy rejestru o jeden bit dłuższego niż najdłuższa z wejściowych liczb. Jednak w naszym przypadku z powrotem na wyjście wypisujemy jedynie N najmłodszych bitów.
12 module dc_r_tb;
13 parameter N = 10;
14 logic clk, rst;
15 StreamBus #(.N(N)) in (.clk(clk), .rst(rst));
16 StreamBus #(.N(N)) out (.clk(clk), .rst(rst));
17
18 initial begin
19 clk <= 1’b0;
20 forever #1 clk <= ~clk;
21 end
22
23 initial begin
24 rst <= 1’b0;
25 #4 rst <= 1’b1;
26 end
27
28 initial begin
29 in.valid = 1’b1;
30 for (int i = 0; i < 1000; i++) begin
31 @(posedge clk);
32 in.data = 120*$sin(2*pi*i/100)+480;
33 end
34 $stop;
35 end
36
37 dc_r #(.N(N), .S(5)) dut (
38 .in(in),
39 .out(out));
40 endmodule
Musimy teraz przygotować testbench dla nowego modułu, którego kod pokazuje listing 5. Najpierw definiujemy parametr N, który określa długość szyny danych. Wykorzystamy go dalej do stworzenia interfejsów: wejściowego i wyjściowego. Następnie w dwóch osobnych blokach initial generujemy sygnał zegarowy oraz reset. Linie 28…35 odpowiadają za stworzenie danych. Tworzymy sinusoidę o amplitudzie 120, z przesunięciem 480. Generujemy w pętli 1000 próbek, po czym kończymy symulację. Na samym końcu został umieszczony testowany moduł. Włączamy symulację, wywołując w programie ModelSim komendę:
do dc_r_sim.do
Skrypt jest bardzo podobny do tych, których używaliśmy wcześniej. Warto jednak zwrócić uwagę na nowy przełącznik –decimal. Powoduje on, że dany sygnał jest interpretowany jako liczba ze znakiem i wyświetlany w systemie dziesiętnym.
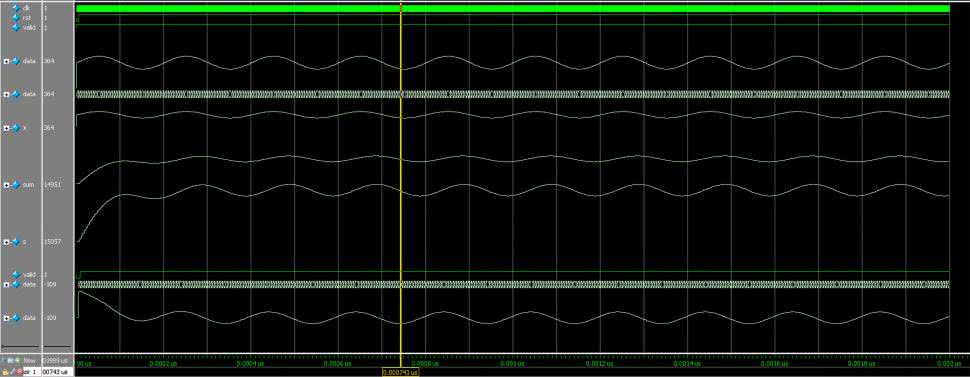
Wynik symulacji widoczny jest na rysunku 13. Dwa pierwsze wiersze to sygnał zegarowy oraz reset. Następnie widzimy dane wejściowe i ich wersję skonwertowaną na liczbę ze znakiem (oznaczone jako x). Dalej mamy cząstkowy sygnał sum i s. Możemy zaobserwować, jak narastają one w początkowym okresie. Powiązane jest to ze znikaniem składowej stałej w wyjściowym sygnale data, pokazanym w ostatnim wierszu.
Po ustabilizowaniu się sygnału wyjściowego otrzymujemy sygnał oscylujący wokół zera. Na zaprezentowanym rysunku nie są widoczne wszystkie detale, dlatego zachęcam do samodzielnego uruchomienia symulacji.












