Zaloguj
Zaloguj




Haptyczny oznacza: dotykalny, dotykowy, wykorzystujący zmysł dotyku. Systemy haptyczne, to takie, które wykorzystują dotyk do komunikacji z użytkownikiem, zupełnie tak, jak systemy wizualne korzystają ze zmysłu wzroku. Na ogół systemy dotykowe wymagają kontaktu np. z panelem sterującym urządzenia. Jednak opracowywane są technologie, które nie wymagają bezpośredniego dotyku, a pomimo tego mogą oddziaływać na ten zmysł. Jest to możliwe przy użyciu różnych niekonwencjonalnych technologii, takich jak sprężone powietrze czy ultradźwięki. W dalszej części tego artykułu przyjrzymy się tym rozwiązaniom, sposobami realizacji oraz ich wadom i zaletom. Technologie te są obecnie badane i rozwijane w celu opracowania nowatorskich interfejsów człowiek-maszyna, które nie wymagają bezpośredniej interakcji z powierzchnią systemu.
Jedno z zastosowań dotyczy motoryzacji. W nowoczesnych pojazdach wyposażonych w ekrany dotykowe sprzężenie haptyczne umożliwia bezwzrokową obsługę niektórych systemów przez kierowcę, co ma swoje oczywiste zalety. Ich zastosowanie w samochodowych systemach multimedialnych zwiększa bezpieczeństwo pozwalając kierowcy skupić się na drodze. Ponadto bezdotykowe elementy sterujące są higieniczne w użytku, idealnie, więc sprawdzają się w środowiskach medycznych, przemysłowych i domowych, takich jak szpitale, kuchnie czy toalety.
Technologie
Skupimy się na dwóch obecnie najpopularniejszych technologiach bezdotykowych interfejsów zapewniających sprzęg haptyczny. Pozwalają one na osiągnięcie podobnego efektu, jednak różnią się sposobem jego uzyskania i wynikającymi z tego parametrami urządzenia.
Air-Jet
Dotykowe sprzężenie zwrotne korzystające ze strumienia powietrza realizowane jest za pomocą dwóch technologii. Pierwsza z nich korzysta ze sprężonego powietrza, wypuszczanego przez zogniskowane dysze. Metoda ta polega na podłączeniu zbiornika ze sprężonym powietrzem przez zawory do ukierunkowanych wyjść – dysz. Zawory te mogą być sterowane za pomocą czujników ciśnienia i zaworów serwo-pneumatycznych.

Druga z metod korzysta z wirów powietrznych. Kontrolując różnicę ciśnień pomiędzy dyszą a medium zewnętrznym urządzenie generuje wiry o dokładnie znanej i przewidywalnej geometrii. Metoda ta pozwala wytwarzanym wirom powietrza sięgać na dalsze odległości przy zachowaniu spójnej formy i szybkości. Przykładem generatora wirów powietrznych jest urządzenie AIREAL zaprojektowane przez Disney Research, które zostało pokazane na fotografii 1. Składa się z sześciennej obudowy o wymiarach 8×8×8 cm, elastycznej dyszy o długości 4 cm i silników do obrotu i pochylenia dyszy. Oprócz strony dyszy wylotowej, każda strona modułu ma skierowany do wewnątrz, 2-calowy głośnik basowy o mocy 15 W. Głośniki te pełnią rolę pompy – razem działają jak siłownik wytwarzający sprężone powietrze.
Ciśnienie promieniowania akustycznego
Wytwarzanie wrażenia dotykowego za pomocą ultradźwięków bazuje na zjawisku siły (ciśnienia) promieniowania akustycznego. Fale akustyczne rozchodzą się przez ośrodek (powietrze), na które działa stała siła zwana siłą promieniowania akustycznego. Siła ta jest generowana przez przenoszenie pędu dźwięku w ośrodku. W technologiach dotykowych ciśnienie akustyczne jest generowane przy użyciu elektronicznych przetworników ultradźwiękowych. Przetworniki te są sterowane cyfrowo za pomocą wysokonapięciowego sygnału sterującego, który pozwala na wytworzenie fal ultradźwiękowych odpowiednio silnych, aby mogły odbijać się od ludzkiej skóry.

Przetwornik ultradźwiękowy składa się głównie z materiału piezoelektrycznego przymocowanego do metalowej obudowy z wewnętrznym izolatorem akustycznym. Wytwarza fale ultradźwiękowe, ponieważ materiał piezoelektryczny wibruje z dużą prędkością na skutek przyłożonego napięcia przemiennego. Dzięki tym drganiom o wysokiej częstotliwości wytwarzane są ultradźwiękowe fale akustyczne. Aby fale ultradźwiękowe mogły kształtować interfejs dotykowy „w powietrzu”, stosuje się macierze przetworników ultradźwiękowych (fotografia 2) o wysoce kierunkowej charakterystyce.

Emitując ultradźwięki w określony sposób są one w stanie generować złożone efekty, np. fale stojącą w powietrzu (rysunek 1). Technologia ultradźwiękowa zapewnia wyjątkowe wrażenia dotykowe, tworząc w powietrzu wyczuwalne wirtualne przyciski, przełączniki, pokrętła czy inne obiekty.
Porównanie
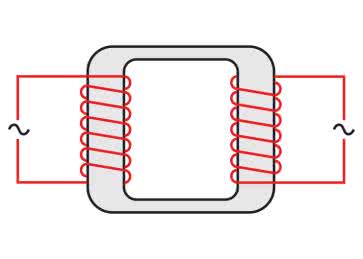
W tabeli 1 znajduje się porównanie opisanych rozwiązań. Metoda wykorzystująca strumień powietrza wydaje się być prostsza w projektowaniu i wdrażaniu w porównaniu z systemami ultradźwiękowymi. Ponadto dotykowe sprzężenie zwrotne wytwarzane przez urządzenie ze strumieniem powietrza może osiągnąć większą odległość. Ma jednak niższą rozdzielczość przestrzenną i wolniej dociera do punktu ogniskowego w przeciwieństwie do urządzenia wykorzystującego metodę ultradźwiękową. Także rozdzielczość przestrzenna systemu ultradźwiękowego jest znacznie wyższa, pozwalając na generowanie naprawdę zaawansowanych interfejsów.
Zastosowania
Istnieje wiele potencjalnych zastosowań, gdzie systemy tego rodzaju mogą się sprawdzić. Wcześniej zostały wymienione interfejsy systemów multimedialnych w przemyśle motoryzacyjnym i urządzenia medyczne – to jedne z najbardziej oczywistych miejsc. Zastosowanie interfejsu, który do obsługi nie wymaga dotyku ani wzroku, jest niezwykłą cechą. Dzięki temu staje się on bardziej wygodny, a co za tym idzie również bezpieczny.
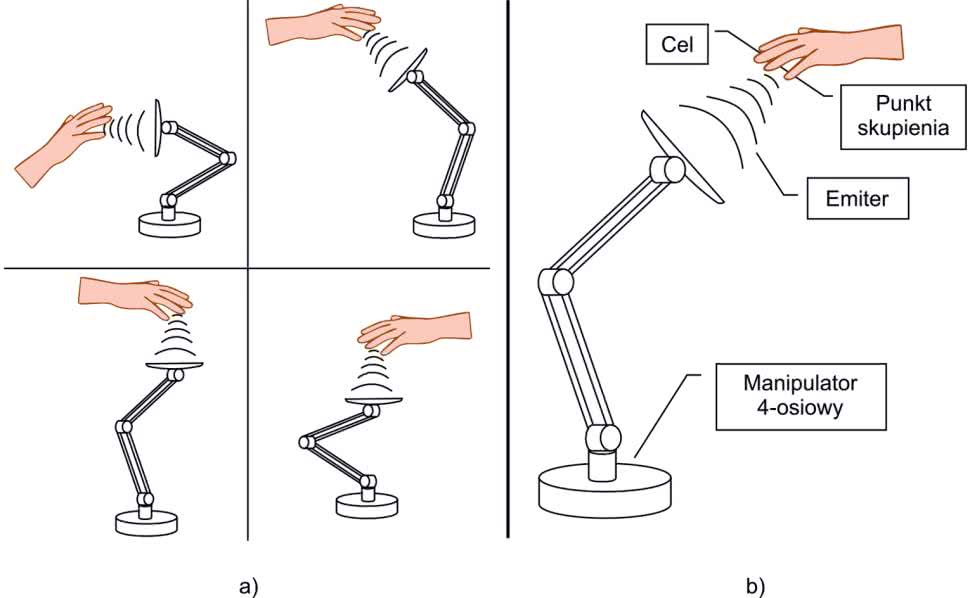
W kontekście systemów, które są w stanie generować w powietrzu trójwymiarowe, wirtualne interfejsy, często mówi się o budowaniu „dotykowego hologramu”. Na rysunku 2 pokazano przykład tego rodzaju systemu, który wykorzystuje emiter ultradźwiękowy, zainstalowany na robotycznym ramieniu z czterema osiami swobody. Emiter zastosowany w urządzeniu zawiera kwadratową matrycę 324 przetworników ultradźwiękowych, sterowanych z dziewięciu 36-kanałowych wzmacniaczy, sterowanych z pojedynczej jednostki centralnej. System ten osiąga nacisk około 1,6 grama, co jest dostateczną wartością, aby zagwarantować dobry odbiór uczucia nacisku. Inne systemy, budowane przez naukowców, zawierają nawet więcej przetworników – nawet kilka tysięcy, i są w stanie wywoływać nacisk sięgający ok. 10 gramów.
Dodatkowo, dzięki temu, że macierz przetworników ultradźwiękowych zamontowana jest na robotycznym ramieniu, „dotykowy hologram” może być emitowany w każdym kierunku. Aby śledzić cel, można użyć czujnika, takiego jak zintegrowany w Kinekcie czy Leap Motion, który pozwoli śledzić rękę użytkownika i porównać jej lokalizację w trzech wymiarach z rzutowanym dotykowym modelem 3D w systemie wirtualnego świata. Haptyczne sprzężenie zwrotne jest generowane po wykryciu kolizji dłoni i modelu w systemie wirtualnego świata. Śledzenie dłoni i ruch robota pozwala na utrzymywanie optymalnej pozycji i odległości pomiędzy macierzą przetworników a dłonią.
Tego rodzaju przetworniki wytwarzają bezkontaktowe haptyczne sprzężenie zwrotne za pomocą ultradźwięków na odległość do 300 mm. Większe układy mogą osiągnąć nawet do 600 mm zasięgu, poświęcając przy tym rozdzielczość przestrzenną, która spada wtedy do około 20 mm. Kompaktowe przetworniki, jakie najpewniej trafią do urządzeń konsumenckich, osiągają zasięg na poziomie 250 mm i rozdzielczość przestrzenną 20 mm.
Spojrzenie w przyszłość
Istnieją pewne wady korzystania z powyższych metod w celu wygenerowania bezdotykowej, haptycznej informacji zwrotnej dla użytkownika. Metoda strumienia powietrza jest prosta w implementacji i może dać stosunkowo akceptowalne sprzężenie zwrotne, jednak ze względu na fizyczne właściwości powietrza, metoda ta nie posiada możliwości korelowania przestrzenno-czasowego w wysyłanych sygnałach, co jest niezbędne w zastosowaniach multimedialnych. Z drugiej strony metoda ultradźwiękowa przezwycięża te wady, jednak też nie jest idealna.
Wielu specjalistów zwraca uwagę na to, że aby przetestować swój system, musieli poprosić ochotników o umieszczenie rąk bardzo blisko dotykowego systemu ultradźwiękowego (ok. 250 mm). Inną kwestią, która budzi obawy przy stosowaniu ultradźwięków jest pewien słyszalny dźwięk wytwarzany przez przetworniki ultradźwiękowe. Ochotnicy często podczas testów tych prototypowych systemów muszą nosić słuchawki, inaczej byliby narażeni, na co najmniej nieprzyjemne dźwięki o dosyć dużym natężeniu.
Istnieje wiele możliwości dalszej poprawy parametrów. Możliwe jest zwiększenie rozdzielczości przestrzennej – wyższa częstotliwość ultradźwięków może zminimalizować średnicę ogniska, co jest preferowane w większości zastosowań dotykowych. Jednak charakterystyka stratna medium przenoszącego ultradźwięki (tj. powietrza), nie działa na korzyść tego rodzaju systemów. Istnieje pewien kompromis między utratą energii a częstotliwością, ponieważ im wyższa częstotliwość, tym większy procent energii jest tracony w medium.
Nie można również ignorować niebezpieczeństw, wpływających na bezpieczeństwo ludzi korzystających z tego rodzaju systemów. Skóra może ulec uszkodzeniu pod wpływem ciepła, jeśli zastosowana zostanie duża moc, powyżej 100 mW/cm2. Dodatkowo ludzka skóra może ulec lekkiemu nagrzaniu, jeśli jest wystawiona na działanie fal ultradźwiękowych o mocy większej niż 140...150 dB. W przypadku większości zastosowań związanych z bezdotykowymi systemami haptycznymi wykorzystywane są znacznie mniejsze moce, co jednak nie znaczy, że w przyszłości inżynierowie nie będą sięgać po większe natężenia.
Są również inne skutki uboczne stosowania ultradźwięków. Badania pokazują, że niektóre skutki uboczne długiej ekspozycji na ultradźwięki w powietrzu mogą obejmować nudności, zmęczenie i bóle głowy. Podczas gdy maksymalny zalecany poziom ciśnienia akustycznego wynosi 110 dB, poziom ciśnienia akustycznego w odległości 300 mm od pojedynczego przetwornika używanego w większości systemów wynosi około 121,5 dB, czyli więcej niż maksymalne zalecenie. Dlatego bardzo ważne jest, aby badacze i użytkownicy wzięli to pod uwagę i przeprowadzili niezbędne pomiary, od których zależy możliwość unikania wypadków.
Z drugiej strony szereg badań, prototypów i projektów dowodzi, że bezdotykowe sprzężenie haptyczne może być z powodzeniem stosowane w szerokiej gamie aplikacji multimedialnych, przemysłowych itp. Opisane dwa możliwe rozwiązania technologiczne, mające na celu wytworzenie haptycznego sprzężenia zwrotnego w powietrzu – strumień powietrza i ultradźwięki – mają swoje wady i zalety, dzięki czemu doskonale odnajdą się w różnych zastosowaniach. Metoda strumieniowa wykazuje tańszą i stosunkowo łatwiejszą implementację, z możliwością dotykowego sprzężenia zwrotnego sięgającego większych odległości w porównaniu z metodą ultradźwiękową. Jednak nieporęczne systemy pneumatyczne mogą napotkać pewne wyzwania przy komercjalizacji takich produktów. Dla porównania metoda ultradźwiękowa oferuje bardziej zwarte konstrukcje z wysoką rozdzielczością przestrzenną i dokładnością w punktach ogniskowych, jednak o ograniczonym zasięgu.
Nikodem Czechowski, EP
Źródła:
- Ch. Desnoyers, S. Pohorecky 6.101 Final Project: „Ultrasonic Haptic Feedback” May 18, 2017;
- Faisal Arafsha, Longyu Zhang, Haiwei Dong, and Abdulmotaleb El Saddik, „Contactless Haptic Feedback: State of the Art”, Conference: 2015 IEEE International Symposium on Haptic, Audio and Visual Environments and Games (HAVE);
- T. Hoshi, T. Iwamoto, H. Shinoda, „Non-contact tactile sensation synthesized by ultrasound transducers,” Proceedings of the 3rd Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environments Teleoperator Systems, pp. 256–260, 2009.