Zaloguj
Zaloguj



Zestawienie układów scalonych z obsługą protokołu Bluetooth 5 umieszczono w tabeli 1. Zaprezentowane układy scalone są w fazie produkcyjnej, przedprodukcyjnej, planowanej produkcji lub zapowiedzi produkcji. Dla układów produkowanych i dostępnych do zakupu została podana cena pojedynczego układu (w witrynie DigiKey). Dla innych układów podano dostępne informacje o planach. Podano też cenę układu uruchomieniowego (oznaczenie /EVAL/), jeśli jest dostępny. Niektóre układy oprócz modelu podstawowego mają istotne warianty. Zostały one pokazane w nawiasach klamrowych „{}”.
Zestawienie zostało wykonane na podstawie informacji uzyskanych z Internetu i nie stanowi pełnego przeglądu układów ani kompletnej prezentacji ich cech. W zalewie układów scalonych obsługujących poprzednie wersje protokołu Bluetooth bardzo trudno jest wyłowić układy z obsługą protokołu Bluetooth 5.
Wynik poszukiwań jest sporym zaskoczeniem. Układów z obsługą komunikacji ze standardem Bluetooth 5 nie oferują takie firmy jak Cypress, Renesas, Panasonic, Fujitsu i Toshiba. Dalej używany jest standard Bluetooth v4.2. Również najnowsza wersja najbardziej popularnego komputera jednopłytkowego Raspberry Pi 3 B+ obsługuje „tylko” standard Bluetooth v4.2/ BLE.
Najlepszym sposobem prezentacji złożonej informacji jest rysunek. Dlatego zostały pokazane schematy blokowe wszystkich omawianych układów scalonych. Mają on różny stopień szczegółowości, jednak dostarczają bardzo cennych informacji o budowie wewnętrznej tych układów.
Bluetooth 5
Prace nad nową wersją protokołu Bluetooth były prowadzone bardzo szybko. Opublikowanie wstępnej wersji specyfikacji (2016) spotkało się z pojawieniem się na rynku układów scalonych „ Bluetooth 5 ready”. W roku 2017 opublikowanie pełnej specyfikacji protokołu Bluetooth 5 spowodowało poszerzenie oferty. Kilka firm oferuje produkowane obecnie układy scalone z pełną obsługą protokołu Bluetooth 5. Kolejne firmy hucznie zapowiadają ich produkcję, lub prezentują nowe rozwiązania, ostatnio 27.02.2018 na „Embedded World 2018” w Norymberdze. Standard Bluetooth 5 jest wstecznie kompatybilny z wcześniejszymi wersjami Bluetooth v4.0/4.1/4.2 LE.
Standard Bluetooth 5 wprowadza nowe funkcjonalności:
Long Range (LR) – zasięg został zwiększony czterokrotnie.
High Speed (HS) – dwukrotnie zwiększono przepustowość (do 2 Mbps).
Advertising Extensions (AE) – ośmiokrotnie zwiększono rozmiar wiadomości aktywacyjnej.
Power Amplifier (PA) – Podwyższony poziom mocy do +20 dBm.
Network Coexistence (NC) – aktualizacje poprawiające współistnienie z innymi standardami komunikacji bezprzewodowej.
Informacja o zgodności układu scalonego ze standardem Bluetooth 5 nie oznacza, że dostępne są wszystkie nowe funkcjonalności. Niektórzy producenci podają informację o pełnej zgodności ze standardem Bluetooth 5 oraz o certyfikacji przez konsorcjum SIG.
Bluetooth Mesh
W czerwcu 2017 konsorcjum SIG opublikowało pierwszą specyfikację standardu sieci Bluetooth Mesh dla układów BLE. Ten standard jest zgodny ze standardem Bluetooth 5 oraz Bluetooth 4.x. Trzeba jednak zauważyć, że specyfikacja sieci Bluetooth Mesh jest zdefiniowana osobno od specyfikacji rdzenia BLE i nie jest częścią standardu Bluetooth 5.
Ocenia się, że zastosowanie sieci Bluetooth w konfiguracji Mesh może mieć bardzo istotne znaczenie dla rozwoju Przemysłowego Internetu Rzeczy (IIoT).
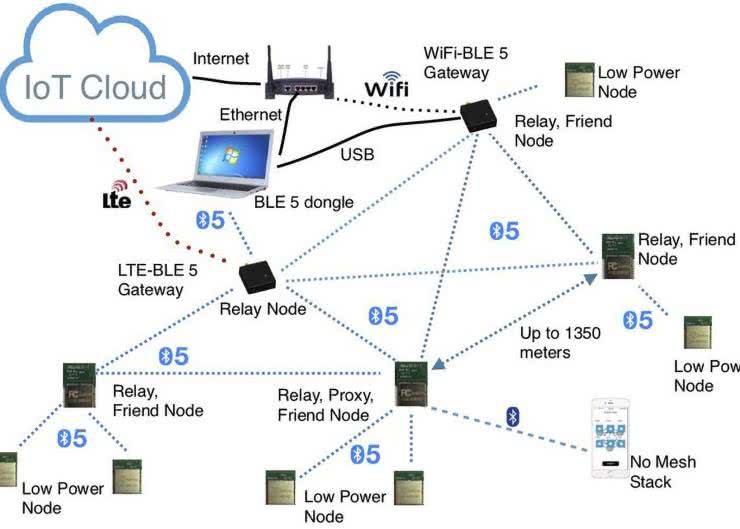
Firma Nordic Semiconductor dostarcza środowisko programistyczne nRF5 SDK for Mesh, które pozwala na realizację systemów typu Bluetooth Mesh z użyciem układów serii nRF52 [9]. Przykład sieci Bluetooth Mesh zbudowanej z modułów BT832 (Fanstel) [16] z układami scalonymi tej serii został pokazany na rysunku tytułowym.
Również firma Silicon Laboratories dostarcza oprogramowanie do pracy sieci Bluetooth Mesh dla układów dwuzakresowych Blue Gecko EFR32BG13 [7].
Firma ST Microelectronics zapowiada obsługę sieci Bluetooth Mesh dla układów STM32WB55VG (ST Microelectronics) [13]. Podobnie Texas Instruments dla układów serii SimpleLink CC13x2R/CC26x2R [2-5].
IEEE 802.15.4
Wiele układów scalonych oprócz obsługi protokołu Bluetooth 5 może w paśmie 2,4 GHz pracować także z komunikacją w standardzie IEEE 802.15.4. Umożliwia to dodatkową obsługę różnych protokołów: Zigbee, Thread, Wireless M-Bus, ANT oraz protokołów autorskich (proprietary). Przykładem może być układ CC2652R2 (Texas Instruments) [5] obsługujący te protokoły.
Układy serii nRF52x (Nordic Semiconductor) [9] umożliwiają dodatkowo jednoczesną transmisję w sieciach Bluetooth 5 i Thread. Zapewnia to mechanizm Dynamic Multiprotocol z obsługą stosów S140 v5 SoftDevice oraz OpenThread RF. Inni producenci też zapowiadają możliwość równoczesnej transmisji z protokołem Bluetooth 5 oraz innym standardem: STM32WB55VG (ST Microelectronics) [13], K32W042 (NXP) [8] (rys. 3).
Praca dwuzakresowa
Dwóch producentów oferuje układy scalone pozwalające na pracę dwuzakresową. Oprócz pracy w paśmie 2,4 GHz mogą one pracować w paśmie poniżej 1 GHz (Sub-1GHz). Praktycznie w Europie oznacza to pasma ISM 868 MHz oraz 440 MHz. Typowo stosowana jest komunikacja w standardzie IEEE 802.15.4. Umożliwia to obsługę różnych protokołów: 6LoWPAN, KNX RF, Wi-SUN, SUN-FSK oraz rozwiązań autorskich producentów.
Dwuzakresowy procesor Blue Gecko EFR32BG13 (Silicon Laboratories) [7] jest już w produkcji i dostępny za rozsądną cenę. Drugi układ scalony SimpleLink CC1352R (Texas Instruments) [2] jest w fazie przedprodukcyjnej. Ale dostępne są próbki układów z serii przedprodukcyjnej o oznaczeniu XCC1352R1F3. Jest to zaawansowana wersja PG1.1. Jednak wersja z pełną kwalifikacją produkcyjną jest zapowiadana na początek roku 2019. Układ scalony CC1352R ma osobne wyprowadzenia dla obsługi transmisji w paśmie 2,4 GHz oraz w pasmie 868 MHz /915 MHz. Co sugeruje możliwość jednoczesnej pracy w obu pasmach. Schemat blokowy tego układu pokazano na rysunku 1.
Układ scalony (QCA4020, Qualcomm) [10] umożliwia, oprócz komunikacji w standardzie Bluetooth, komunikację w standardzie WiFI (802.11a/b/g) w dwóch zakresach 2,4 GHz oraz 5 GHz. Realizowane jest to poprzez zastosowanie osobnego rdzenia sprzętowego.
Układy SoC (System on Chip)
Najbardziej istotną cechą układów scalonych dla Internetu Rzeczy jest bezpieczeństwo, niski pobór mocy oraz maksymalne zintegrowanie funkcjonalności. To jest nie tylko komunikacja, zajmuje ona niewielka część powierzchni układu scalonego. Większość powierzchni zajmują układy peryferyjne. Dla kompletnej obsługi systemu wbudowanego z wieloma czujnikami.
Wszystkie układy scalone z obsługą protokołu Bluetooth 5 są typu SoC (System on Chip). We wszystkich układach zostały zastosowane rdzenie procesorowe rodziny ARM Cortex-M.
Rozwiązania organizacji układów scalonych oferowanych przez producentów są różne. Wydaje się, że wynika to z różnego przeznaczenia tych układów. Tak więc najbardziej rozbudowane układy scalone są: wielordzeniowe (multi core), z obsługą wielu protokołów komunikacyjnych (multi protocol) oraz dwuzakresowe (dual band). Przykładem jest najnowszy układ SimpleLink CC1352R firmy Texas Instruments [2] (rys. 1).
Rdzeń główny
Jako rdzeń główny (aplikacyjny) stosowany jest typowo rdzeń ARM Cortex-M4F. Umożliwia on wykonywanie obliczeń zmiennoprzecinkowych oraz obliczeń sygnałowych. Wręcz, jest on nazywany przez firmę ARM jako procesor DSP (procesor sygnałowy).
Jako rdzeń główny użyto rdzenia ARM Cortex-M3 tylko układach: RSL10 (ON Semi) [12] (rys. 7) oraz SimpleLink CC2640R2 (Texas Instruments) [3]. Są to układy obecne dłużej na rynku. W nowszej wersji układu SimpleLink CC2642R (Texas Instruments) [4] został zastosowany już rdzeń ARM Cortex-M4F. W jednym układzie użyto rdzenia ARM Cortex-M0 (DA14585/14586, Dialog Semiconductor) [6] (rys. 6). Ale jest on bardzo nietypowy, przeznaczony do elektroniki ubraniowej.
Występuje bardzo duża rozpiętość maksymalnej częstotliwości zegarowej pracy rdzenia głównego: od 16 MHz do 128 MHz.
Występuje też bardzo duża rozpiętość wielkości zastosowanej pamięci RAM i Flash. Typowo większość kodu oprogramowania firmowego jest umieszczana w pamięci ROM. Jeden układ (DA14585, Dialog Semiconductor) [6] nie posiada pamięci Flash a jedynie pamięć OTP (One Time Programming) jednokrotnego programowania. W ogóle, jest to nietypowy układ dedykowany do rozwiązań elektroniki ubraniowej o bardzo małym poborze mocy. A mimo to ma wbudowany moduł sprzętowy obsługi audio.
Następne rdzenie
Większość układów scalonych jest wielordzeniowa. Drugi rdzeń pracuje niezależnie i typowo obsługuje komunikację bezprzewodową. Najczęściej, jako drugi, jest stosowany rdzeń ARM Cortex-M0 lub Cortex-M0+. Obsługa komunikacji jest realizowana programowo z kodem umieszczonym w pamięci ROM. Z możliwością zastosowania kodu z pamięci Flash i rekonfigurowania radia, włącznie z własnym protokołem.
W jednym układzie scalonym (RSL10, ON Semi) [12] (rys. 7) oprócz głównego rdzenia ARM Cortex-M3 został zastosowany rdzeń LPDSP32. Jest to rdzeń DSP przeznaczony do wykonywania złożonych obliczeń w czasie rzeczywistym. Umożliwia on realizowanie aplikacji o dużych wymaganiach obliczeniowych jak kodek audio.
W jednym układzie (QCA4020/24, Qualcomm) [10] (rys. 8) został zastosowany osobny rdzeń dedykowany dla obsługi standardów Bluetooth 5 oraz IEEE 802.15.4. Oraz dodatkowy, osobny rdzeń, do obsługi komunikacji w standardzie WiFI (802.11a/b/g).
Układy scalone rodziny SimpleLink CC13x2R/CC26x2R (Texas Instruments) [2-5] posiadają trzeci rdzeń Sensor Controller (rys. 1) o bardzo małym poborze mocy. To wyjątkowe rozwiązanie służy do inteligentnej obsługi układów peryferyjnych. Bez konieczności budzenia rdzenia głównego.
Migracja sprzętu
Bardzo ważnym zagadnieniem dla użytkownika jest migracja z dotychczas używanych układów do nowej wersji. Dotyczy to migracji rozwiązań sprzętowych oraz oprogramowania.
Dobrym rozwiązaniem jest kompatybilność układów scalonych nowej wersji z poprzednimi „nóżka w nóżkę”. Takie rozwiązanie oferuje (z małymi wyjątkami) nowa seria SimpleLink CC13x2R/CC26x2R wobec układów poprzedniej serii CC13x0/CC26x0 (Texas Instruments) [2-5] oraz seria nRF52x wobec nRF51 (Nordic Semiconductor) [9].
Zasilanie
Wszystkie układy scalone z obsługą protokołu Bluetooth 5 mają bardzo rozbudowane zarządzanie poborem mocy oraz posiadają rozbudowany układ zasilania z przetwornicą DC/DC (np. seria nRF52) [9]. Wewnętrznie są podzielone na osobne strefy zasilania kluczowane programowo.
Bezpieczeństwo
Wszystkie układy scalone z obsługą protokołu Bluetooth 5 mają bardzo rozbudowane sprzętowe wspomaganie pracy dla wymagań bezpieczeństwa. Wszystkie układy posiadają moduł sprzętowego wspomagania szyfrowania AES-128 lub AES-256 oraz generator TRNG.
Na przykład układ scalony (QCA4020, Qualcomm) [10] udostępnia funkcje zabezpieczeń, do których należą: bezpieczny rozruch, szyfrowanie pamięci Flash, ochrona przed kopiowaniem, a także obsługa protokołu HTTPS oraz WPA/WPA2 w trybach z zabezpieczeniami Personal i Enterprise.
Zupełnie rewolucyjne rozwiązanie zastosowała firma Nordic Semiconductor w układach serii nRF52x [9] (rysunek 2).
Układy serii nRF52x posiadają dedykowany moduł ARM TrustZone CryptoCell 310 cryptographic accelerator (coprocessor). Jest to kompletne rozwiązanie sprzętowo-programowe problemów bezpieczeństwa i kryptologii. Wydaje się najbardziej rozwojowym podejściem do tych zagadnień.
Układy serii nRF52x (Nordic Semiconductor) [9] udostępniają również komunikację w standardzie NFC-A. Stos obsługi NFC pozwala na realizację parowania aplikacji Bluetooth z zastosowaniem techniki Out-of-Band (OOB). Ułatwia to proces uwierzytelniania dwóch urządzeń z komunikacją Bluetooth poprzez wymianę informacji uwierzytelniającej poprzez połączenie NFC.
Wzmacniacz mocy
Niektóre układy mają dodatkowo wzmacniacz mocy radiowej. Udostępniają one różny poziom mocy: +20 dBm (SimpleLink CC1352P, Texas Instruments) [2], +19 dBm (Blue Gecko EFR32BG13, Silicon Laboratories) [7](rysunek 5) oraz +8 dBm (nRF52840, Nordic Semiconductor) [9].
Kwalifikacja samochodowa
Niektóre układy spełniają kwalifikację samochodową AEC-Q100, jak CC2640R2F-Q1 (Texas Instruments) [14] oraz NCV-RSL10 (ON Semi) [15].
Obsługa układów zewnętrznych
Niektóre układy scalone posiadają układy sprzętowe obsługi łącza USB – seria nRF52 [9] i QN9080 (NXP) [11] (rys. 4) lub wyświetlacza LCD – STM32WB55VG (ST Microelectronics) [13] (rys. 9) .
Aktualizacja poprzez radio
Wraz z powiększaniem się rozmiaru budowanych sieci Internetu Rzeczy oraz przy szybkim rozwoju oprogramowania bardzo istotnym zagadnieniem staje się aktualizacja oprogramowania. I to zarówno oprogramowania firmowego producenta układów scalonych (np. stosu komunikacyjnego) jak i oprogramowania użytkownika. Bardzo dobrym rozwiązaniem jest aktualizacja oprogramowania poprzez radio (Over The Air – OTA). Taką aktualizację oferują np. układy serii nRF52 (Nordic Semiconductor) [9] oraz serii SimpleLink CC13x2R/CC26x2R (Texas Instruments) [2-5].
Moduły uruchomieniowe
Projektowanie płytek drukowanych do pracy ze scalonymi układami radiowymi jest trudne i drogie. Dlatego bardzo ważna dla użytkownika jest dostępność modułów z tymi układami.
Są ich dwie kategorie: zestawy uruchomieniowe oraz moduły produkcyjne.
Praktycznie każdy producent układów scalonych z obsługą standardu Bluetooth oferuje zestaw uruchomieniowy dla produkowanych układów scalonych. Zestawy uruchomieniowe umożliwiają szybkie rozpoczęcie pracy z wybranym układem scalonym. Typowo są one dostarczane z zaprogramowaną aplikacją demonstracyjną pozwalającą na natychmiastową pracę „prosto z pudełka”. Razem z projektami przykładowymi dostarczanymi przez producenta daje to możliwość łatwego rozpoczęcia praktycznej pracy z układem scalonym. Istotną własnością zestawu uruchomieniowego jest możliwość debugowania kodu w czasie rzeczywistym ze wspomaganiem sprzętowym. Pożądaną cechą zestawu uruchomieniowego jest też dosyć niska cena, typowo w granicach $30 – $50.
Dobrym przykładem modułu uruchomieniowego jest moduł startowy CC1352R1 Launch Pad (Texas Instruments) [19] (rys. 11). W module został zastosowany najnowszy, trzyrdzeniowy układ scalony CC1352R1F3 [2]. Zestaw jest przeznaczony do pracy w pasmach 868 MHz/915 MHz oraz 2,4 GHz z anteną wykonaną na płytce drukowanej. Na płytce modułu jest emulator sprzętowy standardu XDS110 umożliwiający debugowanie w czasie rzeczywistym. Na złączach jest udostępnionych 26 wyprowadzeń wejścia-wyjścia (GPIO) układu scalonego CC1352R.
Moduły Internetu Rzeczy
Dla rozwoju Internetu Rzeczy bardzo ważna jest dostępność kompletnych modułów komunikacji radiowej z zestawem czujników. Jest wiele zestawów pracujących z protokołem Bluetooth 4.2. Ale na razie prawie nie ma modułów pracujących z nowym standardem.
Dobrym wyjątkiem jest moduł Nordic Thingy:52 IoT Sensor Kit (Nordic Semiconductor) [18] (rys. 10). W module został zastosowany układ scalony nRF5232 z najnowszej serii nRF52 [9]. Moduł zawiera szereg czujników: temperatury, wilgotności, ciśnienia, jakości powietrza, koloru i poziomu oświetlenia oraz 9 osiowy czujnik ruchu.
Moduł Thingy:52 IoT Sensor Kit otrzymał główną nagrodę ACE 2017 (Annual Creativity in Electronics) w kategorii zestawy projektowe. Nagrody ACE Awards są cenionym wyróżnieniem, którym nagradza się najlepsze na rynku elektronicznym produkty innowacyjne.
Moduły produkcyjne
Moduły produkcyjne umożliwiają zastosowanie wybranego układu scalonego w projekcie produkcyjnym. Ma to bardzo duże znaczenie wobec wymagania certyfikatu zgodności układu radiowego z wymaganiami, np. Unii Europejskiej. Moduł produkcyjny jest gotowy do dołączenia bezpośrednio do własnego projektu, bez konieczności znajomości zagadnień projektowania dla układów radiowych.
Moduły produkcyjne mogą być oferowane przez producenta układu scalonego ale typowo są one też produkowane przez innych dostawców (3rd Party). Jest to bardzo istotna dziedzina, która może decydować o popularności układu scalonego na runku. Listy modułów należy szukać na portalach producentów układów scalonych.
Dobrym przykładem modułu produkcyjnego jest moduł ANNA-B112 (U-blox) [1]. Jest to moduł typu System In Package (SIP) o rozmiarach 6.5×6.5×1.2 (mm). W module został zastosowany układ scalony nRF52832 z najnowszej serii nRF52 (Nordic Semiconductor) [9]. Podobnie w serii modułów BT832 (Fanstel) [16] dla układów tej samej serii.
Kolejnym przykładem jest mały 12.9×15×2.0 (mm) i tani ($7,98) firmowy moduł BGM13P z dwuzakresowym procesorem Blue Gecko EFR32BG13 (Silicon Laboratories) [7].
Kilku producentów oferuje moduły z układem SimpleLink CC12640R2 (Texas Instruments) [3]. Jednak praktycznie nie można ich nigdzie kupić.
Oprogramowanie
Tworzenie oprogramowania jest obecnie największą częścią wydatków projektowych. Dlatego istotna jest możliwość wyboru komponentów środowiska programowego przez projektanta oprogramowania, np. wybór kompilatora (np. GCC) lub całego środowiska programowego.
Układy scalone rodziny SimpleLink CC13x2R/CC26x2R (Texas Instruments) [2-5] są obsługiwane w ramach platformy SimpleLink (rys. 12). Dostarcza ona moduły sprzętowe, środowisko programowe Code Composer Studio (CCS), dedykowane pakiety programowe Software Development Kit z systemem operacyjnym czasu rzeczywistego TI-RTOS i bibliotekami oraz wtyczki (Plugin) do CCS z oprogramowaniem aplikacyjnym (np. rozpoznawanie głosu). Do programowania rdzenia Sensor Controller służy środowisko programowe Sensor Controller Studio. Do programowania parametrów pracy układu radiowego z rdzeniem ARM Cortex-M0 służy środowisko programowe SmartRF Studio. Możliwa jest praca ze środowiskiem CCS lub IAR Embedded Workbench.
Układy serii nRF52 (Nordic Semiconductor) [9] są obsługiwane przez środowisko programistyczne nRF52 SDK w parze ze stosami protokołów komunikacyjnych. Środowisko programistyczne nRF52 SDK jest zbudowane z zastosowaniem standardu ARM CMSIS. Umożliwia to zastosowanie przez użytkownika różnych ścieżek tworzenia kodu wynikowego: SEGGER Embedded Studio, Keil MDK-ARM, GCC. IAR Embedded Workbench. Stos protokołu Bluetooth 5 o nazwie S140 SoftDevice obsługuje 20 współbieżnych połączeń i jest kompatybilny ze stosami innych protokołów komunikacyjnych np. ANT.
Bardzo ważną cechą środowiska programowego jest pełna (lub prawie) kompatybilność nowych wersji oprogramowania firmowego z poprzednimi. Dla serii SimpleLink CC13x2R/CC26x2R (Texas Instruments) [2-5] oraz serii nRF52 (Nordic Semiconductor) [9] firmy oferują takie rozwiązanie. Co więcej jest też deklaracja pełnej 100% zgodności programowej kodu w ramach układów serii.
System RTOS
Kolejnym istotnym zagadnieniem tworzenia oprogramowania dla Internetu Rzeczy jest użycie systemu operacyjnego czasu rzeczywistego (RTOS – Real Time Operating System). Przy zastosowaniu skomplikowanego układu scalonego użycie systemu RTOS wydaje się koniecznością. Przy odpowiednim zaprojektowaniu oprogramowania, użycie systemu RTOS daje prawie wyłącznie korzyści. Jeśli producent układu scalonego dostarcza własny system RTOS to staje się on systemem pierwszego wyboru. Typowo zapewnia on tworzenie optymalnego kodu użytkowego z pełnym wykorzystaniem możliwości dostarczanych przez układ scalony. Powstaje jednak problem tworzenia kodu przenośnego. Rozwiązaniem dostarczanym przez firmę Texas Instruments dla serii SimpleLink CC13x2R/CC26x2R (Texas Instruments) [2-5] jest zastosowanie API standardu POSIX i wybór pomiędzy darmowym, firmowym (dedykowanym) systemem TI-RTOS lub darmowym (jeszcze), standardowym systemem FreeRTOS (rys. 12).
Podobnie firma Nordic Semiconductor dla serii nRF52 [9] wspiera zastosowanie systemu operacyjnego Keil RTX oraz FreeRTOS.
Co dalej?
Dla obsługi sieci IoT są dostępne jeszcze specjalizowane sposoby komunikacji jak LoRa i SigFox. Jednak są one przeznaczone do specyficznych zastosowań z bardzo małą szybkością transmisji.
Czarnym koniem Internetu Rzeczy może być komunikacja komórkowa LTE. Dostępne są moduły z obsługą standardu 3GPP Release 13 (LTE UE Category M1/NB1): Machine-Type Communication (eMTC), Narrow Band IoT (NB-IoT) oraz EC-GSM-IoT. Zaletą tego rozwiązania jest gwarancja zasięgu, wadą – opłata abonamentowa.
Moduły te pozwalają rozszerzyć obszar zastosowań technologii LTE o systemy wymagające niedużej maksymalnej przepustowości, bardzo niskiego poboru mocy, a także niskiej złożoności. Deklarowany jest dziesięcioletni czas pracy z jednej baterii. Czyli bardzo porównywalnie z wynikami dla komunikacji ze standardem Bluetooth 5 i IEEE 802.15.4.
Co jest najważniejsze?
W ankiecie przeprowadzonej z pytaniem o najważniejszą cechę Przemysłowego Internetu Rzeczy (IIoT) pierwsze miejsce zajęła – stopa zwrotu (return on investment). Dopiero na drugim miejscu znalazło się bezpieczeństwo.
Dobrą odpowiedzią na takie zapotrzebowanie jest nota aplikacyjna „Simplifying software development to maximize return on investment” [17]. A jakie w niej rady – trzeba użyć zintegrowanego środowiska sprzętowo – programowego.
Henryk A. Kowalski