Zaloguj
Zaloguj



We współczesnym świecie trendem obowiązującym konstruktorów większości urządzeń elektronicznych jest oszczędność energii. W wielu wypadkach jest to szeroko rozumiany obszar związany nie tylko z użytkowaniem urządzenia, ale również ze zużyciem surowców i energii przeznaczonej na jego wyprodukowanie. Skupmy się jednak na zagadnieniach związanych z samym mikrokontrolerem i jego najbliższym otoczeniem.
Takie działania są z jednej strony wymuszane przez regulacje prawne, a z drugiej przez samych użytkowników, którzy żądają możliwie najdłuższego czasu pracy urządzenia przenośnego po naładowaniu jego akumulatora lub wymianie baterii. Energooszczędność najczęściej wymaga takiego trybu pracy mikrokontrolera, w którym rdzeń i możliwie jak najwięcej układów peryferyjnych przebywają w trybie uśpienia/ obniżonego poboru energii i są wybudzane jedynie na czas realizacji ważnych zadań.
W większości współczesnych mikrokontrolerów moduły peryferyjne, takie jak interfejsy komunikacyjne czy kontroler DMA, pracują niezależnie od CPU i są w stanie samodzielnie realizować pewne zadania bez jego włączania. Z punktu widzenia energooszczędności jest bardzo istotne, aby były one wykonywane w jak najkrótszym czasie. Wówczas średni prąd zasilania pobierany przez urządzenie jest niewielki, co przekłada się na dłuższy czas funkcjonowania przy zasilaniu bateryjnym. Dlatego wydajność rdzenia jest powodem, dla którego mikrokontrolery 32-bitowe tak świetnie radzą sobie we współczesnych urządzeniach, praktycznie wypierając inne rozwiązania. Dziś nikogo już nie dziwi fakt, że 32-bitowy rdzeń może mieć obudowę 16-nóżkową i zajmować powierzchnię około 2 milimetrów kwadratowych.
Należę do pokolenia osób, które swoje pierwsze programy tworzyły dla mikrokontrolerów 8048, 8049 i 8051. Wtedy głównie używaliśmy asemblera. Wydaje mi się, że podobnie jak wielu konstruktorów rozpoczynających karierę w tamtych latach, muszę walczyć z samym sobą sięgając po rdzeń 32-bitowy do realizacji prostych czynności, ponieważ jestem obciążony tamtym sposobem myślenia, pochodzącym z czasów, w których do 32-bitowego rdzenia sięgało się przy realizacji bardzo wymagających zadań, ponieważ było to związane z ogromnymi kosztami gotowego systemu. Dziś jest inaczej - mikrokontrolery i mikroprocesory 32-bitowe są tanie, i wszechobecne.
Pomimo bezdyskusyjnych zalet rdzeni 32-bitowych mają one jednak wady. Elastyczność jest okupiona trudnością konfigurowania samego rdzenia i modułów peryferyjnych. Owszem, są do tego odpowiednie narzędzia, które nie tylko podpowiadają, ale nawet generują odpowiedni kod w języku C, jednak pomimo pewnego ryzyka takiego stwierdzenia (a to przez ogromny wybór narzędzi do tworzenia programów) trzeba powiedzieć, że programowanie mikrokontrolerów 32-bitowych jest trudniejsze albo nawet znacznie trudniejsze, niż ich 8-bitowych. Wiem, że takie twierdzenie może wywołać sprzeciw, ponieważ to zależy od konkretnej aplikacji, ale załóżmy, że w tym momencie mam na myśli mikrokontrolerowe "Hello world!", pierwszy program, którego zadaniem jest migotanie diodą LED dołączoną do wyprowadzenia. W 8-bitowcu nie musimy używać kompilatora C, biblioteki, samo oprogramowanie nawet w asemblerze zajmie co najwyżej kilka lub kilkanaście linijek. Dlatego w niektórych zastosowaniach, mimo wszystko, warto pamiętać o starszych rdzeniach zwłaszcza, że producenci poprawiają ich wydajność, zmieniają technologie produkcji na bardziej energooszczędne oraz otaczają rdzeń ciekawymi modułami peryferyjnymi.
O ile 8-bitowiec nie bardzo radzi sobie z obsługą multimediów czy skomplikowanego wyświetlacza LCD (aczkolwiek nie jest to regułą), o tyle w takim zastosowaniu przyda się rdzeń 16-bitowy. W wielu aplikacjach może też przydać się możliwość zasilania rdzenia napięciem 5 V, co może poprawić odporność na zaburzenia elektromagnetyczne. Taka właściwość jest potrzebna w urządzeniach przeznaczonych dla motoryzacji lub medycyny.
Ogromną zaletą starszych mikrokontrolerów jest ich długa obecność na rynku. Dzięki niej stały się dobrze znane oraz znacznie wzrosła liczba narzędzi, w tym darmowych, stosowanych nie tylko przez profesjonalistów, ale i amatorów. Same mikrokontrolery też miały czas na to, aby zostać sprawdzone od A do Z i udoskonalone przez producentów. Nie ulegajmy powszechnej "armizacji", warto przemyśleć alternatywy.
Atmel - mikrokontrolery z rdzeniem AVR

Mikrokontrolery AVR z rdzeniem 8-bitowym podzielono na trzy rodziny: tinyAVR (ATtiny), megaAVR (ATmega) oraz AVR Xmega (ATxmega).
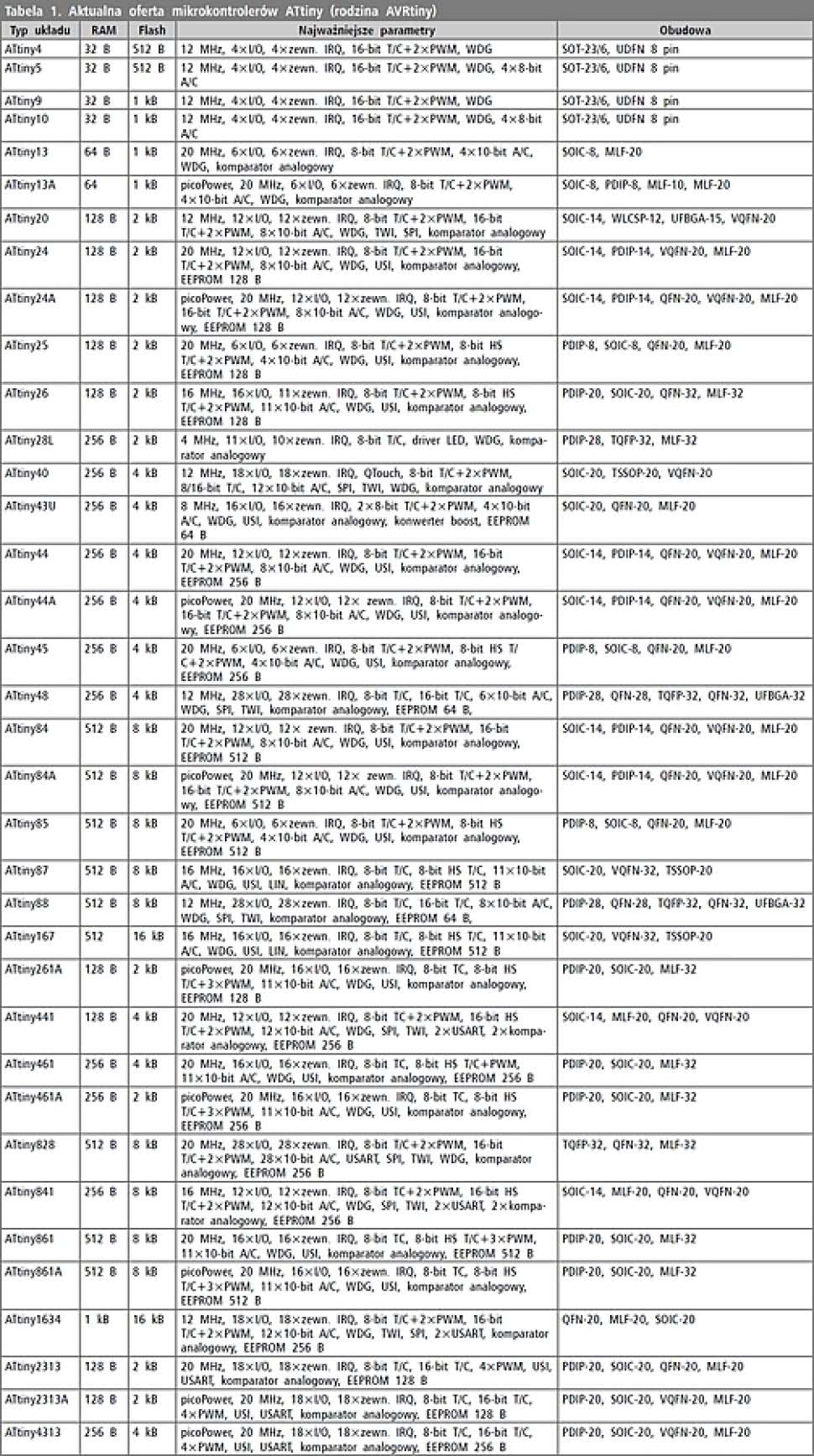
Pierwsza grupa obejmuje tanie układy o podstawowej funkcjonalności, wyposażone w raczej niewielką pamięć Flash (0,512 B...16 kB), pamięć RAM mieszczącą - zależnie od układu - do 4 kB danych (32 B...4 kB), oferowane w obudowach mających od 6 do 32 wyprowadzeń. Aktualnie rodzina ATtiny obejmuje około 36 układów o różnych możliwościach. Ich wykaz umieszczono w tabeli 1.
Poszczególne układy mikrokontrolerów w obrębie rodziny tinyAVR różnią się wyposażeniem - od mających podstawowe peryferia, po "uzbrojone" w pamięć EEPROM, przetwornik A/C, generator PWM i interfejs USI, który może być używany jako SPI, UART lub kompatybilny z I²C - TWI. Mimo niewielkich obudów mikrokontrolery z tej rodziny można debugować i programować w aplikacji docelowej, co ma ogromne znaczenie na etapie uruchamiania prototypu. Ciekawostką w tej rodzinie jest ATtiny43U, który dzięki wbudowanej przetwornicy może pracować przy zasilaniu napięcie zaledwie 0,7 V. Kompatybilność z innymi AVRami zapewnia możliwość użycia bibliotek programowych - mam tu na myśli głównie QTouch służącej do łatwego wykonywania interfejsu dotykowego. Uwaga: nie wszystkie ATtiny mogą obsługiwać panele dotykowe.
Kolejną grupę 8-bitowców Atmela tworzą układy z rodziny megaAVR. W momencie tworzenia tego artykuł, ta rodzina mikrokontrolerów obejmuje 80 układów, których raczej nie będziemy tu wymieniali. Inaczej niż tinyAVR, "megi" znacznie różnią się wyposażeniem w moduły peryferyjne, wielkością pamięci oraz liczbą wyprowadzeń, ale wszystkie mają ten sam 8-bitowy, znany rdzeń AVR. Maksymalna prędkość przetwarzania danych wynosi do 20 MIPS. Liczba wyprowadzeń I/O rozciąga się od 20 do 69, pojemność pamięci Flash od 4 (ATmega48) do 256 kB (ATmega2560 i 2561). Niektóre "megi" doczekały się swoich wariantów w technologii picoPower, co korzystnie wpłynęło na zmniejszenie poboru energii. Każda ATmega może być programowania w aplikacji oraz aktualizować swoje oprogramowanie za pomocą funkcji wbudowanego bootloader’a, bez konieczności wyłączania urządzenia czy sprzętowego wprowadzania mikrokontrolera w jakiś specjalny tryb pracy.
W ramach rodziny megaAVR konstruktor ma największy wybór układów w znaczeniu wielkości pamięci, liczby wyprowadzeń I/O oraz wbudowanych bloków funkcjonalnych. Można wybierać od nieskomplikowanych układów, tanich i wyposażonych tylko w podstawowe peryferia, do specjalizowanych, mających np. liczne generatory PWM, sprzętowy interfejs USB, CAN, LIN, kontroler wyświetlacza LCD i inne.
Co ważne, te mikrokontrolery są oferowane od wielu lat, więc można się spodziewać dostępności zarówno wiedzy, jak i narzędzi, a wiele z programatorów i kompilatorów jest dostępnych za darmo. Nie bez znaczenia jest też fakt, że producent zapowiada dalszy rozwój tej rodziny nie tyle przez wprowadzanie nowych układów, ile przez zmianę technologii ich wytwarzania, co w zamiarach ma obniżyć cenę mikrokontrolera oraz zmniejszyć pobór energii.
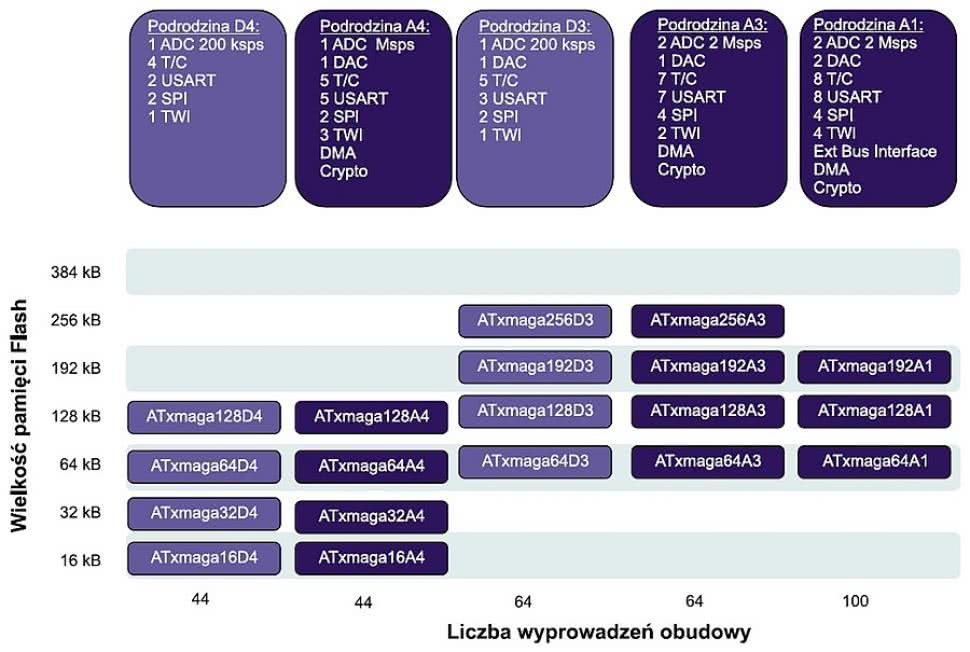
Rysunek 1. Podstawowe parametry mikrokontrolerów z rodziny AVR Xmega
Trzecią grupą mikrokontrolerów z oferty Atmela jest nowoczesna, niedawno wprowadzona do sprzedaży, rodzina mikrokontrolerów AVR Xmega. Aktualnie obejmuje ona 46 układów. Podstawowe parametry wybranych układów pozwalające na zorientowanie się w ofercie mikrokontrolerów wymieniono w tabeli 2, natomiast w szybkiej orientacji będzie pomocny rysunek 1.
Nowe mikrokontrolery uzbrojono w funkcjonalności dotychczas rzadko spotykane w świecie rdzeni 8-bitowych. Wydaje się, że producent miał na celu przede wszystkim obniżenie poboru energii dzięki nieangażowaniu CPU w mniej wymagające zadania, takie jak na przykład transmisja danych pomiędzy blokami funkcjonalnymi.
Bodaj najważniejszą innowacją w Xmega jest system obsługi zdarzeń, który umożliwia współpracę bloków funkcjonalnych bez udziału CPU, przy jednoczesnym zachowaniu gwarantowanego czasu reakcji pomiędzy wystąpieniem zdarzenia o uruchomieniem procedury jego obsługi. Ta funkcja świetnie nadaje się do użycia w aplikacjach, w których kluczowe znaczenie ma zapewnienie czasu reakcji układu w czasie nie dłuższym, niż wymagany np. w automatyce przemysłowej lub motoryzacji. Ponadto, dzięki pracy samych modułów peryferyjnych i niezałączaniu CPU, nowa funkcjonalność może znacząco ograniczyć zużycie energii. Praca systemu obsługi zdarzeń jest wspierana przez kontroler DMA, który umożliwia przesyłanie danych pomiędzy blokami mikrokontrolera bez angażowania CPU.
Niektóre układy Xmega (tabela 2) mają moduł kryptograficzny wspierający 64-bitowy algorytm szyfrowania DES oraz 128-bitowy AES. Dzięki temu, nowe mikrokontrolery świetnie nadają się do różnych aplikacji sieciowych i telekomunikacyjnych, w których jest konieczne szyfrowanie danych zwłaszcza w tzw. sieciach otwartych lub przy korzystaniu z urządzeń dołączanych drogą radiową. W nowej rodzinie układów starano się wyeliminować wady megaAVR, z których jedna była związana z kontrolerem przerwań, niedającym możliwości ustalenia priorytetów ich obsługi. Nowy, wielopoziomowy kontroler przerwań (PMIC) pozwala na nadawanie przerwaniom jednego z trzech priorytetów - obsługa przerwań o priorytecie wyższym odbywa się przed tą o niższym.

Programiście (lub projektantowi systemu) oddano do dyspozycji rozbudowa ny blok generatora sygnałów zegarowych, dzięki któremu Xmega może korzystać z rezonatorów kwarcowych i ceramicznych, wbudowanego generatora RC oraz pętli PLL, oscylatorów zewnętrznych i wbudowanego preskalera częstotliwości. Do wymienionych cech dodajmy bogate wyposażenie w interfejsy komunikacyjne (USART, SPI, EBI, TWI), przetworniki C/A i A/C, kontrolery LCD (do 160 segmentów), programowane obwody logiczne tzw. Xmega Custom Logic, możliwość podtrzymania bateryjnego zasilania RTC, wsparcie dla obsługi USB, a otrzymamy pełny obraz innowacji wprowadzonych przez Atmel. Wydaje się to o tyle dziwne, że jednocześnie ten producent uległ "armizacji" i wytwarza mikrokontrolery z rdzeniem ARM. Widać jednak, że zapotrzebowanie na 8-bitowce jest tak duże, że nie tylko powstają nowe rodziny, ale jest zapowiadany ich rozwój i wprowadzanie nowych rozwiązań.
Freescale - kontynuacja tradycji

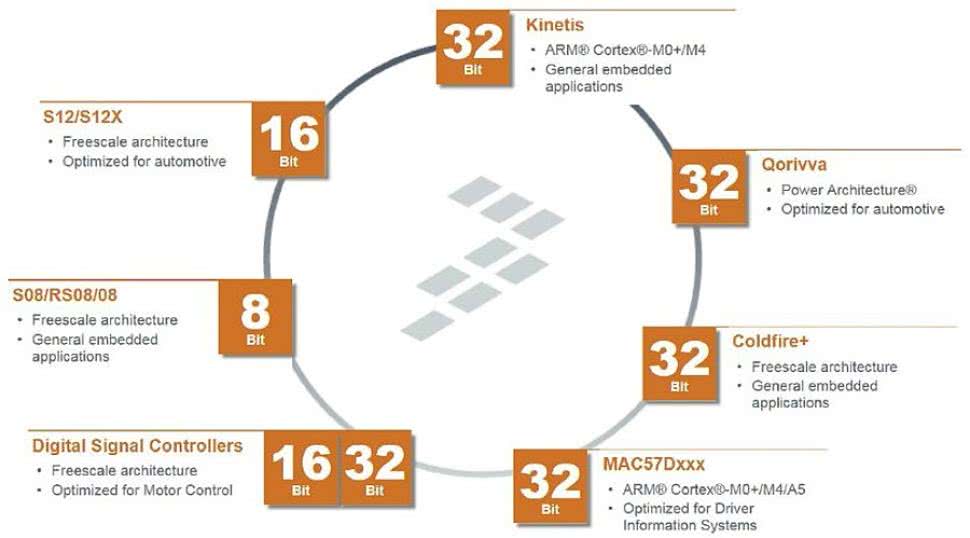
Rysunek 2. Mikrokontrolery wytwarzane przez Freescale
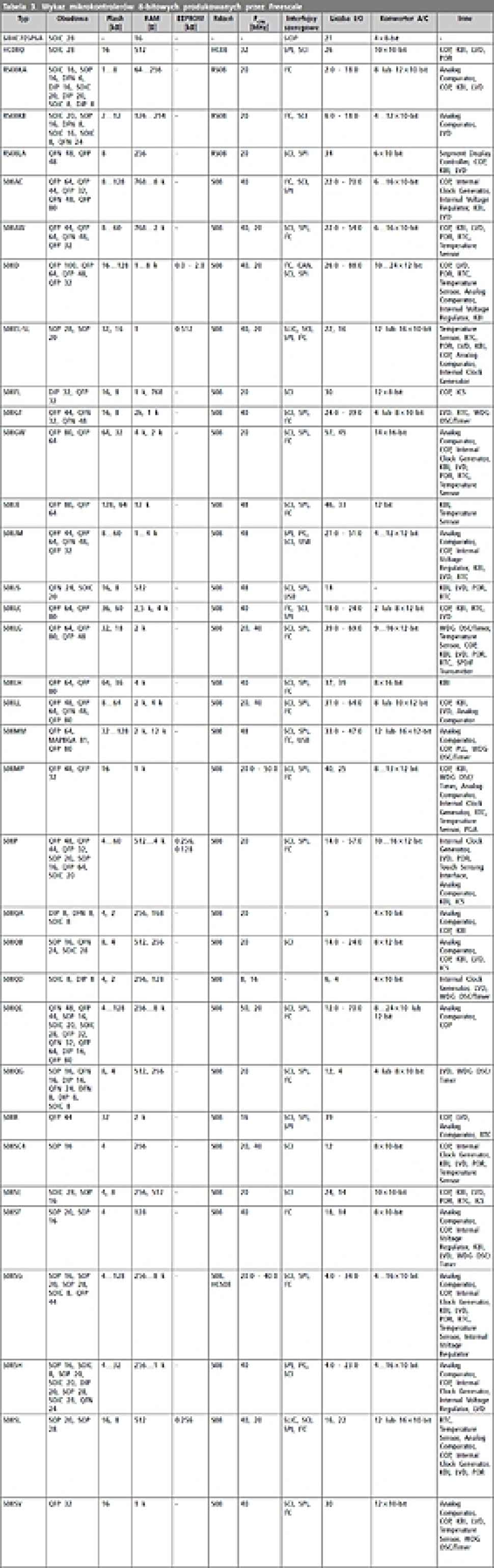
W tabeli 3 umieszczono wykaz mikrokontrolerów Freescale z rdzeniem 8-bitowym. Patrząc na kolumnę "Rdzeń" można zauważyć, że przypuszczenia odnośnie do kontynuowania schedy po Motoroli mają podstawę, ponieważ rdzenie 8-bitowe wykorzystywane przez Freescale to HCS08 i RS08 wzorowane na HC08. Jak przekonamy się dalej, w mikrokontrolerach 16-bitowych jest używany rdzeń HCS12 (i jego warianty) będący zmodyfikowaną wersją HC12, który z kolei swoje korzenie wywodzi z HC11.
Jak wspomniano, stosowany przez Freescale rdzeń HCS08 jest wzorowany na HC08. W najnowszych rozwiązaniach może być on taktowany przebiegiem o częstotliwości do 32 MHz. Rdzeń HCS08 korzysta z tego samego zestawu instrukcji, co rdzeń HC08, a ponadto obsługuje tryb debugowania (instrukcja BGND) do transmisji danych w tle. Pozwala to na pełne korzystanie z możliwości znajdującego się w mikrokontrolerze debuggera BDG oraz emulatora "w układzie" ICE.
Aby spełnić wymagania obniżonego poboru energii w mikrokontrolerach z rdzeniem HCS08 zaimplementowano specjalny tryb oczekiwania (Wait) i trzy dodatkowe tryby zatrzymania (Stop). Wewnętrzny moduł generatora sygnału zegarowego (ICS) zapewnia możliwość wyboru kilku źródeł sygnału taktującego. Zawiera on pętlę częstotliwościową - FLL, wewnętrzny zegar odniesienia - IRC, generator współpracujący z oscylatorem zewnętrznym - XOSC oraz układ logiczny do wyboru sygnału zegarowego - CSL. Pętla częstotliwościowa powiela częstotliwość 512 razy eliminując potrzebę stosowania dodatkowych elementów zewnętrznych wymaganych dla pętli fazowych PLL. Regulowany w zakresie 31,25...39,06 kHz wewnętrzny zegar odniesienia IRC może być wykorzystywany jako odniesienie dla FLL lub bezpośrednio jako źródło sygnału zegarowego magistrali i CPU jednostki centralnej. Generator sygnału odniesienia współpracujący z zewnętrznym oscylatorem można skonfigurować do pracy w trzech trybach. Pierwszy z nich, LF, jest przeznaczony do współpracy z rezonatorami o częstotliwości 32...38,4 kHz. Trybu HF można używać w połączeniu z rezonatorami o częstotliwości 1...16 MHz. Trzeci tryb oscylatora przeznaczono do użytku z zewnętrznym, aktywnym źródłem zegarowym o częstotliwości do 32 MHz. Układ logiczny selekcji sygnału zegarowego (SCL) wybiera i rozdziela sygnał z poszczególnych źródeł zegarowych na jednostkę centralną i dodatkowe bloki mikrokontrolera. Do sterowania jednostką centralną i magistralą można używać źródeł FLL, IRC i XOSC. Częstotliwość sygnału wyjściowego może być w danym czasie dzielona przez 2, 4 lub 8, aby zmniejszyć szybkość wykonywania instrukcji przez CPU i urządzenia peryferyjne dla przedłużenia czasu życia baterii, bez przełączania mikrokontrolera do pracy w tryb oszczędnościowy.
Zawartość pamięci Flash i RAM jest chroniona przez specjalny mechanizm ochrony odznaczający się wysokim poziomem bezpieczeństwa, ponieważ dostęp do tych pamięci można uzyskać jedynie po wprowadzeniu 8-bajtowego kodu. Można też opcjonalnie zabezpieczyć przed przypadkowym zapisem lub skasowaniem ważne "nieulotne" dane i kod, takie jak stałe aplikacyjne oraz bootloader.
W rodzinie mikrokontrolerów z rdzeniem HCS08 są dostępne dwa niezależne moduły czasowe (timery). Pierwszy z nich to 2-kanałowy, programowany, 16-bitowy moduł Timer/PWM (TPM). Każdy z kanałów tego modułu można konfigurować niezależnie, co pozwala np. na zliczanie impulsów zewnętrznych, porównywanie przebiegów i generowanie impulsów PWM z przesunięciem do środka lub do krawędzi. Obsługa rejestrów timerów jest prowadzona w taki sposób, aby uzyskać zwarte, 16-bitowe uaktualnianie współczynnika wypełnienia i uniknąć powstawania impulsów o przypadkowej szerokości. Drugi timer jest 8-bitowy, z możliwością generowania przerwań (MTIM). Pozwala on na dołączanie różnych źródeł sygnału zegarowego i generowanie przerwań. Może pracować w trybie pracy ciągłej (free run) i jako "modulo timer" z funkcją programowania okresowych przerwań po przepełnieniu licznika.
Przetwornik A/C może spełniać rolę prostego interfejsu dla dowolnego czujnika z wyjściem analogowym. Przetwornik może prowadzić konwersję w wybranym kanale, w trybie ciągłym lub jednokrotnym. Każda operacja konwersji jest inicjowana programowo lub z przerwaniem w czasie rzeczywistym (RTI). Przetwornik można skonfigurować tak, żeby porównywał w sposób ciągły jedno napięcie z wcześniej określoną dolną lub górną wartością graniczną napięcia i generował przerwanie w momencie przekroczenia tych wartości. Należy zaznaczyć, że funkcji tej można używać do wyprowadzenia mikrokontrolera z trybu oszczędzania zasilania, pod warunkiem, że jako źródło sygnału zegarowego wybierze się źródło zegarowe tego przetwornika.
Opisywane mikrokontrolery wyposażono także w komparator analogowy (ACMP) porównujący dwa napięcia wejściowe lub jedno wejściowe napięcie analogowe z wewnętrznym napięciem odniesienia (bandgap reference). Napięcie z modułu jest doprowadzane do innych układów wewnętrznych mikrokontrolera i do linii I/O. Włącza ono inne, wewnętrzne układy peryferyjne mikrokontrolera i systemy zewnętrzne w celu ciągłego monitorowania i dalszego przetwarzania sygnałów wyjściowych komparatora. Można też wyzwalać opcjonalne przerwania komparatora zboczem narastającym, opadającym lub też jednym i drugim zboczem sygnału wyjściowego komparatora. Takie przerwanie może być wykorzystywane do wyprowadzenia mikrokontrolera z trybu oszczędzania zasilania. Wszystkie mikrokontrolery mają czujnik temperatury, którego wyjście jest dołączone do jednego z kanałów przetwornika. Umożliwia to użytkownikowi pomiar temperatury struktury układu scalonego bez poświęcania na ten cel analogowego kanału wejściowego. Ponadto, aby zapewnić poprawną pracę wewnętrznego stabilizatora napięcia odniesienia oraz zasilacza zewnętrznego, można mierzyć w ten sam sposób wewnętrzne napięcie odniesienia i odpowiednio napięcie zasilacza.
W mikrokontrolerach są dostępne trzy interfejsy komunikacyjne. Interfejs SCI zapewnia transmisję między mikrokontrolerem i zdalnymi urządzeniami w standardzie UART (pełny dupleks, asynchroniczny, NRZ). Interfejs SPI pozwala na ustanowienie połączeń w trybach: bardzo szybkim w trybie "Master" do 5 Mb/s oraz "Slave" do 2,5 Mb/s. Zintegrowany interfejs I²C jest przystosowany do transmisji danych z prędkością do 100 kb/s.
Oprócz rdzenia HC08 w mikrokontrolerach Freescale jest stosowany również rdzeń RS08, który jest rdzeniem "zredukowanym". Co oznacza to w praktyce? Konstruktorzy tego rdzenia skupili się na zminimalizowaniu jego fizycznych wymiarów w krzemie (przekłada się to na cenę układu), a osiągnięto to dzięki usunięciu z rdzenia elementów nadmiarowych z punktu widzenia aplikacji dostępnych dla "małych" mikrokontrolerów. Najważniejsze zmiany wprowadzone w rdzeniu RS08 w stosunku do HCS08 to:
- Usunięcie z listy instrukcji poleceń: Mutiply, Divide, Nibble, Swap, Decimal Adjust, Acc, Negate, Complement, Arithmetic Shift i niektórych instrukcji skoków oraz operacji na stosie.
- W rejestrze znaczników (flag) CCR pozostawiono jedynie dwie flagi: Carry i Zero.
- Z rdzenia usunięto rejestr H oraz wskaźnika stosu SP (Stack Pointer).
- Zabroniono wielopoziomowego wywoływania procedur z procedur.
- Licznik PC ma długość 14 bitów, co ogranicza maksymalny rozmiar pamięci programu do 16 kB.
- Wektorowy moduł obsługi przerwań zastąpiono znacznie prostszym mechanizmem, który przerzuca na programistę konieczność ustalenia źródła sygnału przerwania.
Optymalizacji rdzenia RS08 pod kątem dopasowania do "małych" aplikacji nie przeprowadzono wyłącznie za pomocą odcięcia fragmentów rdzenia uznanych za nadmiarowe, ale wprowadzono też kilka modyfikacji rozbudowujących rdzeń, które mają służyć zmniejszeniu zajętości pamięci Flash oraz przyśpieszeniu wykonywania programów:
- Wprowadzono dwa nowe tryby adresowania: Short oraz Tiny (są to uproszczone tryby adresowania bezpośredniego o ograniczonym zasięgu).
- Zastosowano rejestr Shadow PC, który służy do przechowywania adresu powrotu z procedury spełnia rolę jednopoziomowego stosu.
- Operacje na rejestrze Shadow PC umożliwiają dwie nowe instrukcje: SHA i SLA (wymiana zawartości rejestru z zawartością akumulatora).
- Wprowadzono tzw. pseudoinstrukcje, czyli mechanizm emulacji niektórych instrukcji niedostępnych na liście rdzenia RS08 (mają z niego automatycznie korzystać kompilatory).
- Wprowadzono mechanizm stronicowania pamięci w oknie 64-bajtowym, który umożliwia m.in. wykonywanie operacji na całej pamięci Flash o pojemności do 16 kB za pomocą rozkazów o "krótkim" adresowaniu.
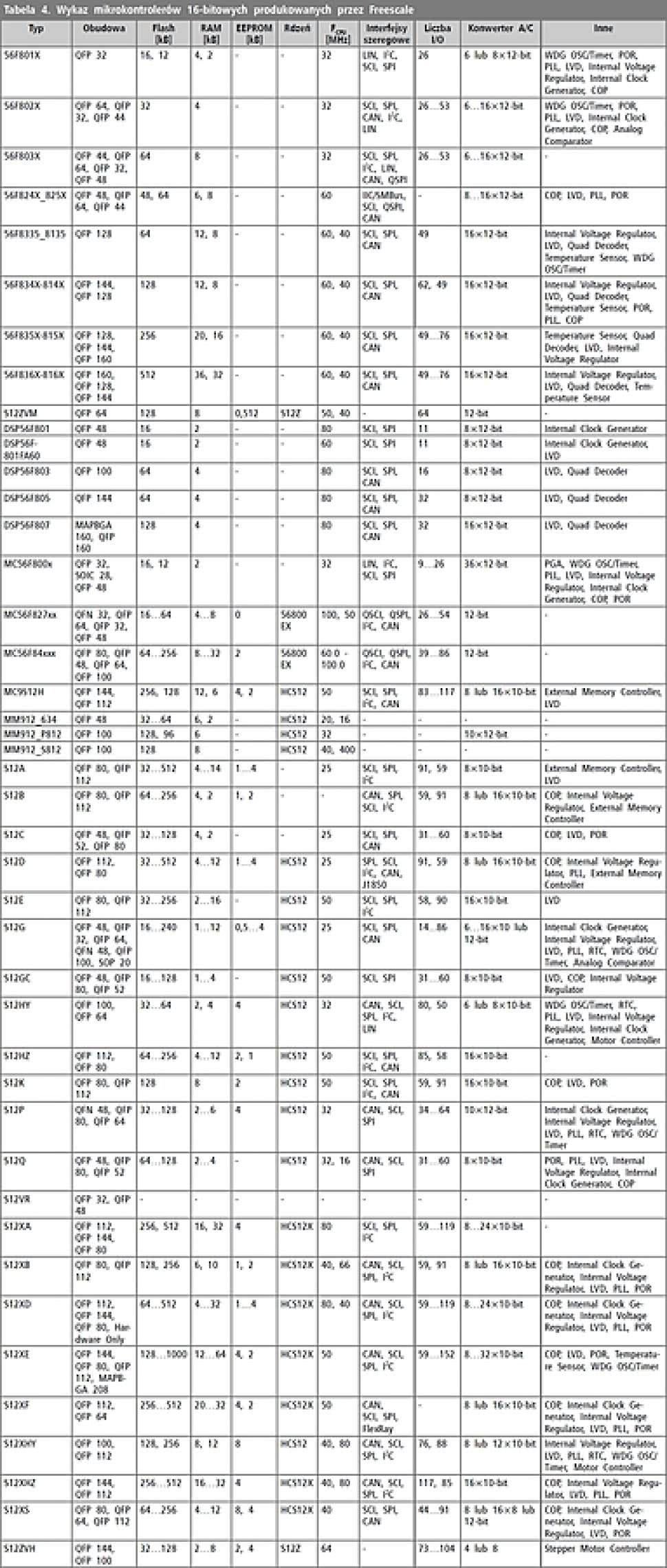
Oprócz mikrokontrolerów 8-bitowych, firma Freescale wytwarza pokaźną liczbę układów z rdzeniami 16-bitowymi HCS12 oraz jego wariantami - HCS12X oraz HCS12Z. Ich wykaz umieszczono w tabeli 4.
Rdzeń HC12 został wprowadzony w latach dziewięćdziesiątych przez firmę Motorola. Jest on rozszerzeniem stosowanego wcześniej rdzenia HC11 i dlatego oprogramowanie dla HC11 powinno działać również na HC12. Pierwsze mikrokontrolery z rdzeniem HC12 miały magistrale taktowane przebiegiem o częstotliwości 8 MHz i pamięć Flash do 128 kB. Podobnie jak HC11, HC12 ma dwa akumulatory 8-bitowe (A i B), które można połączyć w parę i traktować jak pojedynczy akumulator 16-bitowy (D). Oprócz tego, w architekturze rdzenia wyróżniono rejestry indeksowe X i Y, 16-bitowy licznik adresów, 16-bitowy wskaźnik stosu i 8-bitowy rejestr warunków wykonywania programu (CCR).
Na początku roku 2000 rodzinę mikrokontrolerów z rdzeniem HC12 rozszerzono o MC9S12, w której szyna danych była taktowana z częstotliwością do 25 MHz, a pamięć Flash mieściła do 512 kB.
We wrześniu 2004 r. firma Freescale wprowadziła do oferty MC9S12NE64, który był reklamowany jako pierwszy mikrokontroler zapewniający szybkie połączenie Ethernet i wyposażony w reprogramowalną pamięć programu Flash (slogan z materiałów Freescale: "industry’s first single- -chip fast-Ethernet Flash microcontroller"). Zawierał on rdzeń HCS12 taktowany przebiegiem o częstotliwości 25 MHz, 64 kB pamięci Flash, 8 kB pamięci RAM i kontroler Ethernet 10/100 Mbit/s. Kolejny wersja tego mikrokontrolera - MC9S12XDP512 miała magistralę taktowaną przebiegiem o częstotliwości 40 MHz oraz koprocesor nazwany XGATE. Nowa wersja rdzenia HCS12 - HCS12X, w którą był wyposażony nowy mikrokontroler, wprowadzała kilka nowych instrukcji, których zadaniem była poprawa wydajności CPU.
W maju 2006 r. firma Freescale wprowadziła kolejną nowość wśród mikrokontrolerów 16-bitowych - MC9S12XEP100 z rdzeniem HCS12X. Ma on magistralę taktowaną przebiegiem o częstotliwości 50 MHz i dodatkowy moduł ochrony pamięci (bazujący na mechanizmie segmentacji) oraz możliwość emulowania EEPROM za pomocą Flash. W tych mikrokontrolerach wprowadzono też specjalny mechanizm adresowania pamięci o pojemności większej niż 64 kB (stronicowanie oraz adresowanie globalne umożliwiające "sięgnięcie" aż do 8 MB).
Ważną innowacją w mikrokontrolerach Fresscale jest koprocesor XGATE. Jest to 16-bitowy procesor RISC pracujący z podwojoną częstotliwością magistrali. Odciąża ona jednostkę centralną przejmując obsługę przerwań. Pierwsze wersje tego koprocesora nie pozwalały na przerywanie obsługi bieżących przerwań przez przerwania o wyższym priorytecie. Pozwalała na to dopiero trzecia wersja tego koprocesora (XGATEV3) zaimplementowana w 9S12XEP100 i innych, późniejszych. W najnowszych rozwiązaniach rdzeń S12X może zgłaszać przerwanie programowe koprocesorowi XGATE, podobnie jak XGATE jednostce centralnej. Producent zaimplementował system fl ag, dzięki któremu rdzeń i koprocesor synchronizują dostęp do modułów peryferyjnych i unikają kolizji. Typowo, kod programu wykonywanego przez XGATE jest kopiowany do pamięci RAM przy starcie mikrokontrolera w celu uzyskania jak największej szybkości jego wykonywania. Przestrzeń, która może zaadresować XGATE sięga 64 kB (bez stronicowania). Rejestry są wspólne dla CPU i XGATE, jednak obszary pamięci RAM są rozdzielne.
Microchip - własne pomysły na mikrokontrolery

Bramki logiczne zintegrowane z mikrokontrolerem (CLC) pozwalają na wykonywanie w czasie rzeczywistym operacji, takich jak: iloczyn logiczny (AND), suma logiczna (OR), alternatywa wykluczająca (XOR), zaprzeczenie (NOT), negacja iloczynu (NAND), negacja sumy (NOR) i negacja alternatywy wykluczającej (XNOR). Dzięki możliwości ich konfigurowania, do każdej z wymienionych operacji wystarczy pojedyncza bramka. Ponadto, jest możliwe tworzenie automatów w oparciu o wbudowane przerzutniki D, JK oraz zatrzaski D i SR. Jako wejścia do bramek i przerzutników mogą posłużyć sygnały podawane bezpośrednio na wyprowadzenia obudowy mikrokontrolera lub pochodzące z innych modułów funkcjonalnych. Wyjścia mogą być przekierowane na inne wyprowadzenia lub do pozostałych modułów funkcjonalnych. Co ważne, funkcje logiczne będą realizowane również w czasie, gdy mikrokontroler znajduje się w trybie uśpienia.
Kolejnym ciekawym układem peryferyjnym jest CWG (Complementary Waveform Generator) lub COG (Complementary Output Generator), który służy do generowania dwóch, częściowo uzależnionych od siebie sygnałów w oparciu o jeden wejściowy. Na jego wejście mogą być doprowadzone sygnały z komparatorów, PWM-u, komórek logicznych lub sterowanego oscylatora. Generator CWG analizuje zmiany na wejściu umożliwiając filtrowanie krótkich impulsów oraz pozwala na opóźnianie wyjścia w fazie względem wejścia. Dwa, powiązane ze sobą sygnały wyjściowe pozwalają na bezpośrednie sterowanie pracą wielu złożonych urządzeń, takich jak np. silniki. Ułatwiają tworzenie zasilaczy, systemów oświetlenia LED, ładowarek akumulatorów, układów korekcji współczynnika mocy i wzmacniaczy audio klasy D. Dzięki scaleniu w obudowie mikrokontrolera zmniejszają koszt i fizyczną wielkość gotowego urządzenia oraz ograniczają pobór mocy.
W niektórych zastosowaniach bardzo przydatny może okazać się oscylator sterowany cyfrowo (Numerically Controlled Oscillator, NCO), który umożliwia liniowe regulowanie częstotliwości generowanego przebiegu. Sygnał wyjściowy z NCO jest tworzony z 20-bitową rozdzielczością w oparciu o 16-megahercowy sygnał zegarowy. Generowana częstotliwość jest ustawiana za pomocą liczby16-bitowej, co daje skok 15 Hz. Maksymalna częstotliwość przebiegu wyjściowego to 500 kHz. Co więcej, wyjście może pracować w dwóch trybach: standardowym, gdy czas trwania impulsu wynosi połowę jego okresu (tryb FDC) oraz z regulowanym współczynnikiem wypełnienia (tryb PFM).
Prawie każdy z mikrokontrolerów wyposażony w przetwornik A/C ma też wbudowany czujnik temperatury. Jego wskazania mieszczą się w zakresie od -40°C do +85°C, co pozwala na łatwy pomiar temperatury w aplikacji, bez konieczności stosowania dodatkowych komponentów zewnętrznych. Jest przydatny w takich aplikacjach, jak telefony komórkowe, urządzenia o dużej mocy, konsumencki sprzęt domowy i wielu innych. Ułatwia implementację funkcji zabezpieczania urządzeń przed przegrzaniem.
W wielu aplikacjach przyda się generator modulowany cyfrowo. Blok ten umożliwia modulowanie częstotliwości nośnej za pomocą strumienia danych. Może nim być sygnał z wyprowadzenia układu, zegar odniesienia, przebieg PWM, sygnał UART/SPI/ I²C, bit rejestru lub wyjście wbudowanego komparatora. Ułatwia to tworzenie nadajników IrDA oraz przygotowywanie danych do transmisji ASK, FSK, PSK.
Kolejną innowacją jest bramkowany timer, który służy do pomiaru długości impulsów wejściowych. Odliczanie może być rozpoczęte lub wstrzymane za pomocą dowolnego sygnału, którym może być wyjście komparatora, Timer 0 lub wyprowadzenie T1G mikrokontrolera. 16-bitowy licznik Timera 1 może być taktowany przebiegiem z wbudowanego oscylatora (opcjonalnie 4-krotnie spowolnionego) lub oddzielnym z Timera 1. Rozpoczęcie i zakończenie pomiaru może być uruchamiane w oparciu o zbocze opadające lub narastające monitorowanego sygnału. Po zakończeniu pomiaru timer wyzwala przerwanie. Bramkowany timer nie wymaga do działania dodatkowych komponentów i ułatwia dekodowanie sygnału PWM oraz pomiary czasu i częstotliwości impulsów.
W strukturę nowych układów wbudowano też rejestr typu "zatrzask". Może on być sterowany sygnałem z wbudowanego komparatora, programowalnego zegara, pochodzącym spoza mikrokontrolera lub za pomocą kodu programu. Jego wyjście może być wyprowadzone na zewnątrz lub dołączone wewnątrz mikrokontrolera do któregoś z modułów funkcjonalnych. W praktyce i we współpracy z komparatorem ten zatrzask pozwala na wykonanie wszystkiego, co dało się wykonać w oparciu o popularny timer 555 - astabilnych i bistabilnych generatorów sygnałów bez potrzeby stosowania wielu dodatkowych podzespołów. Może znaleźć zastosowanie do budowy modulatora ASK, budowy ściemniaczy, komparatorów fazy i generatorów dźwięków lub generatorów PWM. Uwaga - funkcja zatrzasku SR jest zaimplementowana również w omówionym na początku artykułu bloku konfigurowalnych komórek logicznych CLC.
Dodatkowe bloki peryferyjne sprawiają, że nawet, jeśli do aplikacji zostanie wybrany tani mikrokontroler 8-bitowy o niedużej wydajności, to i tak za jego pomocą można zrealizować zaawansowane funkcje sterowania. Co więcej, zwykle omawiane moduły funkcjonalne nie będą wymagały dodatkowych komponentów, więc ich zastosowanie upraszcza urządzenie, zmniejsza wymagania odnośnie do wielkości płytki drukowanej oraz podnosi niezawodność rozwiązania.
Prawdziwą trudność stanowi zaprezentowanie przeglądu mikrokontrolerów 16-bitowych. Ich wybór w ofercie Microchipa jest bardzo duży. Pełna lista obejmuje ponad 360 pozycji i składają się na nią następujące rodziny mikrokontrolerów: dsPIC30, dsPIC33 i PIC24. Są one dostępne i doskonalone od około 10 lat. W związku z ogromną liczbą układów poprzestaniemy na ich omówieniu, nie będziemy wymieniali ich w tabeli. Osoby zainteresowane ich przeglądem odsyłamy do strony internetowej, której adres podano w materiałach źródłowych.
Mikrokontrolery dsPIC łączą cechy klasycznych mikrokontrolerów oraz prostszych procesorów DSP. Rodzinę układów dsPIC30 zoptymalizowano pod kątem wykorzystania w układach czujnikowych, w systemach zasilania, sterowania napędami elektrycznymi, a także w celu powiększenia grona uniwersalnych mikrokontrolerów przeznaczonych do użycia w typowych aplikacjach. Układy dsPIC33 są w znacznym stopniu zgodne programowo i pod względem rozmieszczenia wyprowadzeń z dsPIC33. Najważniejsze z punktu widzenia użytkownika będą jednak różnice pomiędzy tymi rodzinami, ponieważ to one będą predysponowały mikrokontroler do danej aplikacji.

Rodzina mikrokontrolerów PIC24 była pierwszym krokiem Microchipa w stronę mikrokontrolerów 16-bitowych. Jednym z założeń podczas ich projektowania było zapewnienie kompatybilności - także pod względem wyprowadzeń - z procesorami dsPIC33 i niektórymi ze starszej rodziny PIC18. Dzięki temu konstruktorzy mogą łatwo migrować pomiędzy różnymi platformami, o różnej wydajności i procesorami DSC. Rodzina PIC24 składa się z dwóch grup układów: PIC24F o prędkości dochodzącej do 16 MIPS oraz PIC24H o prędkości do 40 MIPS. Ponadto, układy PIC24H wyposażono w DMA, który służy do szybkiej transmisji danych pomiędzy pamięcią, a większością modułów funkcjonalnych. Charakterystycznym elementem wyposażenia jest także 12-bitowy przetwornik A/C o maksymalnej częstotliwości próbkowania 500 kHz (w odróżnieniu od wersji "F" wyposażonej w równie szybki, ale 10-bitowy przetwornik A/C).
W strukturę mikrokontrolera wbudowano 16-pozycyjny potencjometr cyfrowy sterowany za pomocą rejestru 4-bitowego. Dzięki temu można precyzyjnie ustalić i zmieniać dynamicznie wartość napięcia odniesienia za pomocą programu.
Standardowym wyposażeniem mikrokontrolerów PIC24 jest zaawansowany interfejs do komunikacji szeregowej, przystosowany do bezpośredniej współpracy z interfejsami RS232, RS485, LIN 1.2 i IrDA (oczywiście za pomocą odpowiedniego interfejsu fizycznego). Wyposażono go między innymi w automatyczny detektor prędkości transmisji oraz system automatycznego testowania loopback. Bezpieczeństwo komunikacji szeregowej można zwiększyć wykorzystując sprzętowy generator CRC, który dzięki wydzieleniu rejestrów dostępowych można wykorzystać do obliczania CRC dowolnych grup danych.
Standardowym wyposażeniem wszystkich mikrokontrolerów z rodziny PIC24 są interfejsy SPI i I²C, a wybrane układy mają także wbudowane sprzętowe interfejsy CAN (lub Enhanced CAN). Wyposażeniem, które z pewnością ucieszy wielu projektantów jest kompletny zegar czasu rzeczywistego z kalendarzem i rejestrami alarmu. Wykrycie ustawionego czasu alarmu może być sygnalizowane przerwaniem oraz zmianą stanu jednej z linii I/O. Znika więc występujący w wielu aplikacjach problem odmierzania czasu oraz programowego realizowania kalendarza. Mikrokontroler można łatwo skonfi gurować do pracy w roli zaawansowanego budzika i to w zdecydowanej części w oparciu o wbudowany w niego sprzęt, nie angażując mocy CPU.
Rdzeń mikrokontrolerów wyposażono w bloki mnożenia sprzętowego (także zmiennoprzecinkowego) oraz dzielenia (32:16 bitów), a liniowa przestrzeń adresowa pamięci programu obejmuje aż 12 MB. Dostęp do pamięci danych ułatwiają dwa generatory adresów - osobne dla odczytu i zapisu danych. Maksymalna, liniowa przestrzeń adresowa dla pamięci danych wynosi 64 kB.
Pamięć programu Flash można programować za pomocą interfejsu ICSP lub JTAG. Ten drugi można wykorzystać także do testowania krawędziowego, natomiast do wspomagania uruchamiania systemu z mikrokontrolerem PIC24 służy specjalny, dwuliniowy interfejs ICE.
Microchip zrezygnował (jak na razie) z podążania modnym kursem "na ARM-y" i forsuje własne, przemyślane rozwiązania. Jak pokazują dotychczasowe doświadczenia, od samego początku istnienia firmy inżynierowie firmy Microchip potrafią przewidzieć zapotrzebowanie rynku, czego przykładem jest choćby sukces rodziny procesorów dsPIC. Jednym z elementów sukcesu, kontynuowanym także w odniesieniu do prezentowanych nowości, jest szanowanie nawyków projektantów korzystających z mikrokontrolerów Microchipa, dlatego właśnie zadbano o ich wzajemną kompatybilność, a także o to, żeby projektanci mogli korzystać z dotychczas stosowanych narzędzi, jak choćby ze środowiska MPLab.
Podsumowanie
W pierwszej części artykułu udało się dokonać przeglądu mikrokontrolerów oferowanych przez Atmel, Freescale i Microchip. W kolejnej przyjrzymy się ofercie innych producentów, w tym rzadziej wybieranych do projektowanych urządzeń. Jednak już nawet po działaniach firm wymienionych w tym przeglądzie widać, że oferta nieskomplikowanych mikrokontrolerów 8-bitowych jest nadal rozwijana i zapewne jeszcze przez wiele lat będą one stosowane w różnych urządzeniach. Dobrze też mają się mikrokontrolery 16-bitowe, a ich producenci silnie konkurują z rozwiązaniami proponowanymi przez firmę ARM.
Jacek Bogusz, EP
Bibliografia:
1. http://goo.gl/GyL08w
2. http://goo.gl/2lK5lS
3. http://goo.gl/vgDRN9
4. http://goo.gl/IvS0EC
5. http://goo.gl/0frWp3
6. http://goo.gl/oAqGCp
7. http://goo.gl/IOLoZ1
8. Andrzej Gawryluk "8-bitowe maluchy - historii ciąg dalszy", Elektronika Praktyczna 7/2006
9. Jarosław Doliński "Mikrokontrolery 8-bitowe HCS08", Elektronika Praktyczna 5/2004
10. Tomasz Jabłoński "NCO i CWG w mikrokontrolerach PIC", Elektronika Praktyczna 6/2012
11. Marcin Karbowniczek "Nowoczesne układy peryferyjne 8-bitowych mikrokontrolerów PIC", Elektronika Praktyczna 11/2012
12. Andrzej Gawryluk "dsPIC33/PIC24 - nowe mikrokontrolery firmy Microchip", Elektronika Praktyczna 12/2005"