Zaloguj
Zaloguj



Praca i nauka zdalna stały się jednym z podstawowych narzędzi ograniczania pandemii. Siedząc w domu nie można wszak od nikogo się zarazić, więc wirus nie ma możliwości przenosić się dalej. W wielu wypadkach do zdalnej pracy, czy nauki, wystarczy zwykły komputer, smartfon lub tablet, istnieje jednak szereg aplikacji, gdzie potrzebne są bardziej funkcjonalne systemy teleobecności.
Robot do teleobecności to rodzaj robota, którym można sterować zdalnie i który może funkcjonować, jako zastępca naszej fizycznej obecności w danym miejscu. Na przykład, jeśli jesteś w Warszawie, ale chcesz fizycznie wchodzić w interakcję z zespołem ludzi w Gdańsku, możesz połączyć się z robotem do obecności zdalnej i użyć go, jako swojego zastępcy.
Podstawą stworzenia bardziej funkcjonalnego systemu teleprezencji, jest możliwość poruszania się. Omówiona poniżej konstrukcja to prosty i tani robot wideo, którym można sterować przez Internet – może być uruchamiany wszędzie tam, gdzie istnieje do niego dostęp. Jest to elektromechaniczna platforma, wzbogacona o szereg czujników i elektronikę sterującą. System ten może się poruszać i przekazywać w obie strony sygnał wideo oraz audio.
Podstawa platformy robota
Podstawa robota skonstruowana jest z użyciem plastikowego pudełka, które zapewnia zarówno miejsce do montażu całej konstrukcji, jak i zamyka elektronikę i silniki w obudowie. Konstrukcja zawiera dwa koła napędowe przymocowane do serwomechanizmów z ciągłymi obrotami, które pozwalają im poruszać się do przodu i do tyłu, dzięki czemu robot może jeździć do przodu i do tyłu, a także obracać się w miejscu. Aby nie przechylać się na boki, podwozie posiada dwa metalowe ślizgacze. Całość systemu kontrolowana jest po przez Arduino.
Do budowy podwozia robota potrzebne będą:
- serwa o ciągłej rotacji (×2),
- moduł Arduino,
- uchwyt baterii 4×AA,
- uchwyt baterii 2×AA,
- bateria AA (×6),
- wtyczka zasilania pasująca do Arduino,
- kółka (×2),
- plastikowe pudełko,
- zestaw śrub i nakrętek,
- przewody i rurki termokurczliwe,
- opaski zaciskowej („trytytki”) do montażu elementów – różne rozmiary.
Montaż należy rozpocząć od budowy napędu. Składa się on z dwóch serwomotorów o nieskończonych obrotach. Należy rozwiercić otwory montażowe w ramionach krzyżaków serwosilników (fotografia 1a) i przymocować do nich odpowiednio nawiercone kółka (fotografia 1b). Następnie operację należy powtórzyć z drugim serwosilnikiem i połączyć obydwa w lustrzanym odbiciu, co daje kompletną jednostkę napędową (fotografia 1c).

Moduł napędowy można następnie zainstalować w pokrywce plastikowego opakowania (takiego, jak używa się do przechowywania żywności np. w lodówce). Przed przymocowaniem silników należy jedynie wykonać w wieku otwory na koła, aby mogły one wystawać na drugą stronę wieka.
Następnie z przodu i z tyłu podwozia montowany jest metalowy ślizgacz, zapobiegający przewróceniu się robota. Gotową mechaniczną część podwozia pokazano na fotografii 2.

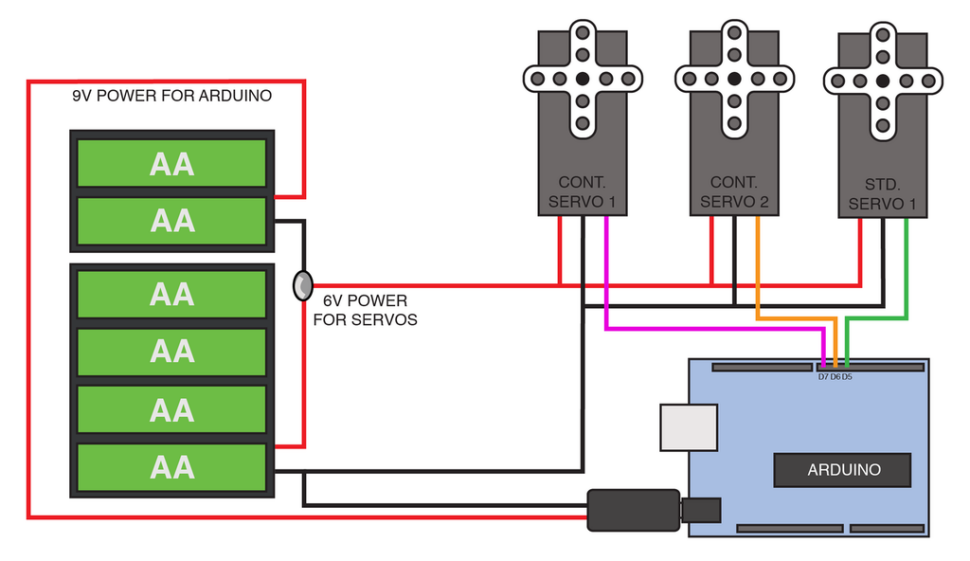
Następnym krokiem jest zamontowanie w niej dwóch koszyków na baterie. W ten sposób generowane są dwa napięcia – 6 V do zasilania serwosilników oraz 9 V do zasilania modułu Arduino. Na rysunku 1 zostało pokazane połączenie poszczególnych elementów podwozia.
Po drugiej stronie koszyków na baterie, na drugiej części plastikowego pojemnika, montowany jest moduł Arduino, sterujący konstrukcją. Aby sprawdzić poprawność montażu, do Arduino wgrać należy szkic z listingu 1.
#include <Servo.h> // Biblioteka do obsługi serwomotorów
Servo ContinuousServo1; // Inicjalizaca serwomotorów z ruchem ciągłym
Servo ContinuousServo2;
void setup() {
// Podłączenie serwomotorów z ciągłymi obrotami do pinów 6 i 7
ContinuousServo1.attach(6);
ContinuousServo2.attach(7);
// Uruchom serwa jako spauzowane. Zmień wartość liczbową, jeśli się nie zatrzymują
ContinuousServo1.write(94);
ContinuousServo2.write(94);
}
void loop() {
int range = random(4); // Wybierz losową liczbę pomiędzy 0 a 3
switch (range) { // Przełączanie trybów oparte o wylosowaną liczbę
case 0: // Jeśli wybrano 0 skręć w prawo i spauzuj na sekundę
right();
delay(500);
stopDriving();
delay(1000);
break;
case 1: // Jeśli wybrano 1 skręć w lewo i spauzuj na sekundę
left();
delay(500);
stopDriving();
delay(1000);
break;
case 2: // Jeśli wybrano 2 jedź prosto i spauzuj na sekundę
forward();
delay(500);
stopDriving();
delay(1000);
break;
case 3: // Jeśli wybrano 3 skręć w jedź wstecz i spauzuj na sekundę
backward();
delay(500);
stopDriving();
delay(1000);
break;
}
delay(1); // Pauza 1 ms dla poprawy stabilności kodu
}
void stopDriving() { // Funkcja do zatrzymania się
ContinuousServo1.write(94);
ContinuousServo2.write(94);
}
void forward(){ // Funkcja do jechania naprzód
ContinuousServo1.write(84);
ContinuousServo2.write(104);
}
void backward(){ // Funkcja do jechania wstecz
ContinuousServo1.write(104);
ContinuousServo2.write(84);
}
void right(){ // Funkcja do jechania w prawo
ContinuousServo1.write(104);
ContinuousServo2.write(104);
}
void left(){ // Funkcja do jechania w lewo
ContinuousServo1.write(84);
ContinuousServo2.write(84);
}
Pozwala on na sprawdzenie podstawowych funkcjonalności – robot porusza się losowo w różnych kierunkach. W kodzie znajdują się podstawowe funkcje do sterowania robotem. Po dodaniu kolejnych elementów robota, program należy poszerzyć o ich obsługę.
Ramie ze smartfonem
Kolejnym krokiem jest zamontowanie na jeżdżącej platformie ramienia, w którym zainstalowany zostanie smartfon. Do budowy ramienia potrzebne będą:
- selfie-stick, z uchwytem na smartfona,
- drut,
- standardowe serwo,
- metalowa blaszka (autor wykorzystał tutaj podkładkę do wykańczania rur w ścianach),
- zestaw śrub i nakrętek.
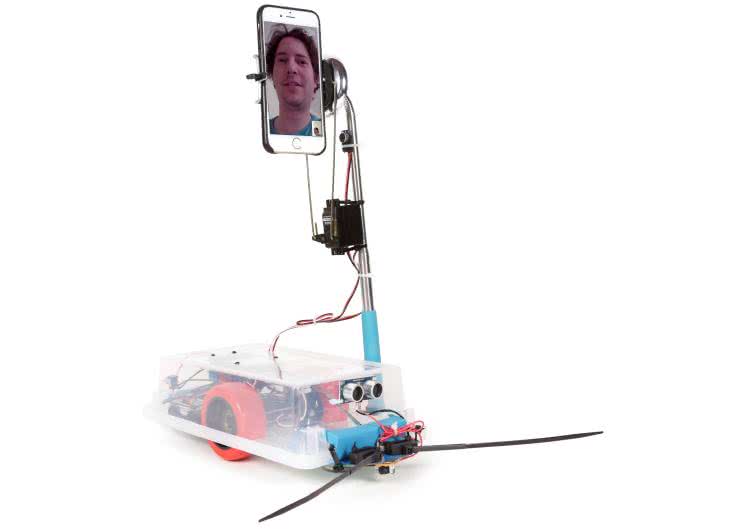
Uchwyt do smartfona montujemy na metalowym elemencie, w którym nawiercamy odpowiednie otwory. Po połączeniu tych elementów do podstawki (blaszki) dołączamy dwa fragmenty drutu, które łączymy z serwomotorem i umieszczamy całość na selfie-stick-u, jak pokazano na fotografii 3. Cięgna i serwo pozwolą na dostosowywanie pozycji telefonu w uchwycie.

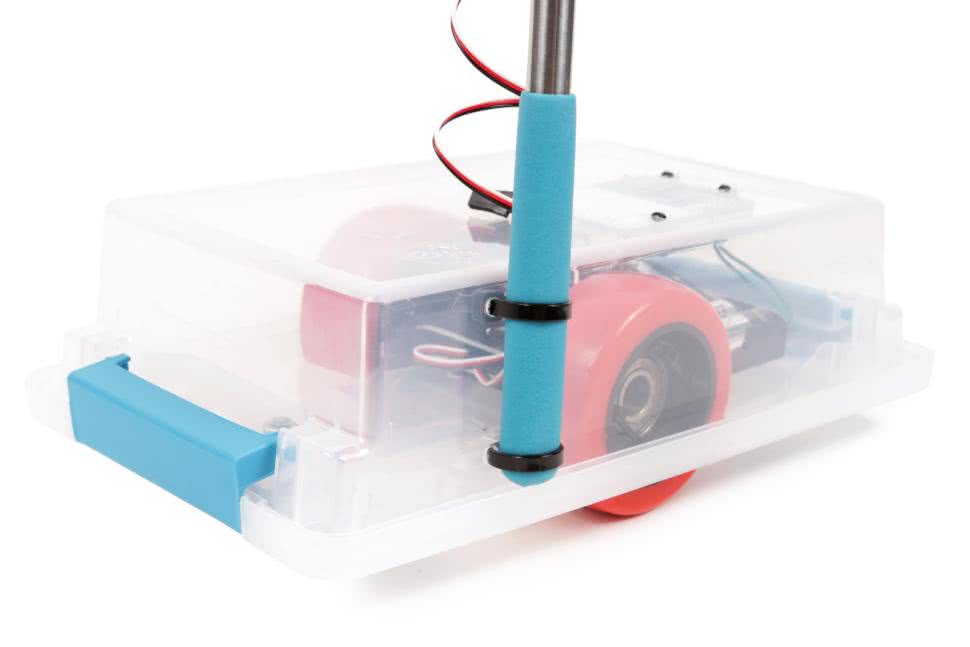
Następnie dolną część selfie-stick-u montujemy do plastikowego pudełka – bazy naszego robota, jak pokazano na fotografii 4. Można przetestować działanie trzeciego serwosilnika, korzystając z kodu na listingu 2.
#include <Servo.h> // Biblioteka do obsługi serwomotorów
Servo StandardServo1; // Inicjalizacja standardowego serwomotoru
void setup() {
StandardServo1.attach(5); // Podłączenie serwa do inu 5
StandardServo1.write(90); // Ustawienie serwa w pozycji neutralnej
delay(2000);
}
void loop() {
StandardServo1.write(135); //Przekręć uchwyt w górę i spauzuj
delay(2000);
StandardServo1.write(90); // Przekręć uchwyt do środka i spauzuj
delay(2000);
StandardServo1.write(45); // Przekręć uchwyt w dół i spauzuj
delay(2000);
StandardServo1.write(90); // Wróć na środek i spauzuj
delay(2000);
}
Inicjalizuje on trzecie serwo i rusza nim przekręcając smartfona w górę, na środek, w dół, na środek i tak dalej – w pętli.
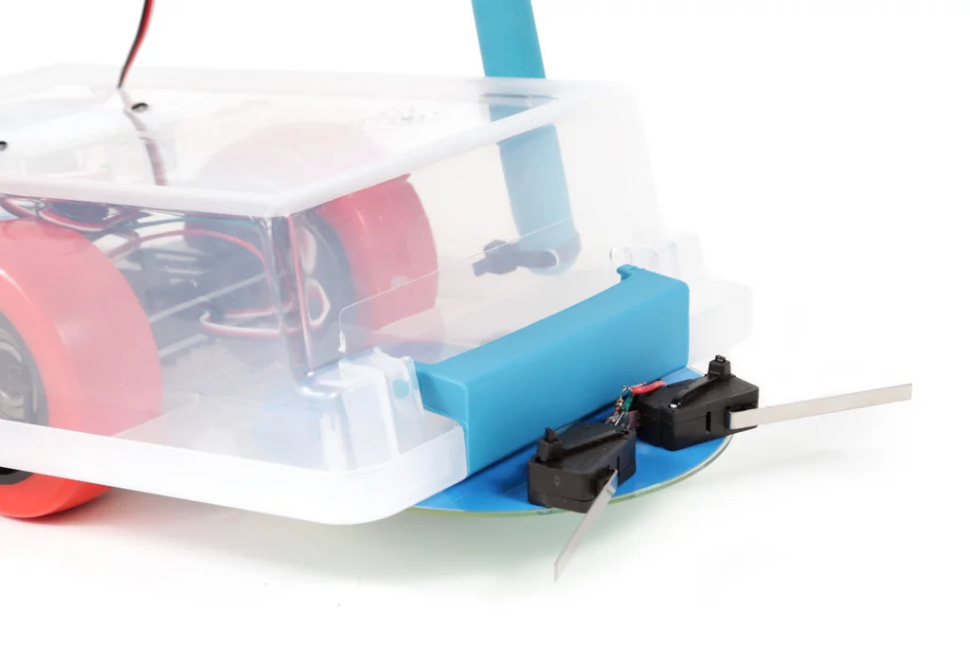
Detektory kolizji
Kolejnym elementem robota jest prosty detektor kolizji. Wykrywa on najechanie przez robota przednią częścią w obiekty. Do złożenia tego modułu potrzebne będą następujące elementy:
- przełączniki chwilowe SPST (×2) – patrz fotografie,
- podstawka pod detektory (autor wykorzystał płytę CD),
- oporniki 10 kΩ (×2),
- okrągłe PCB o średnicy ok. 25 mm,
- podkładki, śrubki, opaski zaciskowe i rurki termokurczliwe.

Przełączniki chwilowe montujemy na podstawce, w sposób pokazany na fotografii 5, a do jednego z wyprowadzeń lutujemy zasilanie poprzez opornik 10 kΩ, a do drugiego masę. Sygnał, który podłączamy do Arduino, pobieramy z drugiej nóżki opornika (tej, która nie jest podłączona do zasilania). Sygnał z detektora podłączany jest do wejścia cyfrowego na pinie 2 modułu Arduino. Moduł detektora dołączany jest do jeżdżącej podstawy tak, jak pokazano na fotografii 6.
Do przetestowania działania przycisku wykorzystać można prosty program, którego najistotniejsze fragmenty pokazano na listingu 3.
int buttonState = HIGH; // Zmienna do przechowywania stanu przycisków
void setup() {
pinMode(2, INPUT); // Inicjalizacja pinu podłączonego do przycisku
// (pin 2) jako wejścia
}
void loop() {
buttonState = digitalRead(2); // Odczytaj stan detektora zderzenia
if (buttonState == HIGH) { // Jeśli stan jest wysoki - brak zderzenia
forward(); // Jazda naprzód
} else {
backOff(); // Wycofanie się po zderzeniu
}
}
// A function which stops the robot, backs off, and changes direction.
void backOff(){ // Funkcja do wycofania się
stopDriving(); // Zatrzymaj się
delay(1000);
StandardServo1.write(30); // Spójrz w dół
delay(2000);
StandardServo1.write(70); // Spójrz z powrotem w górę
delay(2000);
backward(); // Wycofaj robota
delay(1000);
stopDriving(); // Zatrzymaj się
delay(1000);
right(); // Skręć w prawo
delay(1000);
stopDriving(); // Zatrzymaj się
delay(1000);
}
Wykorzystuje on funkcje do sterowania silnikami z listingu 1 oraz listingu 2.
Sensor krawędzi
Kolejnym sensorem instalowanym w urządzeniu jest sensor krawędzi, który zabezpiecza robota przed np. spadnięciem ze schodów. Jest to prosty sensor odbiciowy, sprawdzający czy pod przednią krawędzią robota jest podłoga, czy nie. Do zestawienia takiego układu potrzebne są:
- fotoopornik,
- diody LED (×2),
- opornik 10 kΩ,
- opornik 100 Ω,
- uniwersalna płytka PCB.
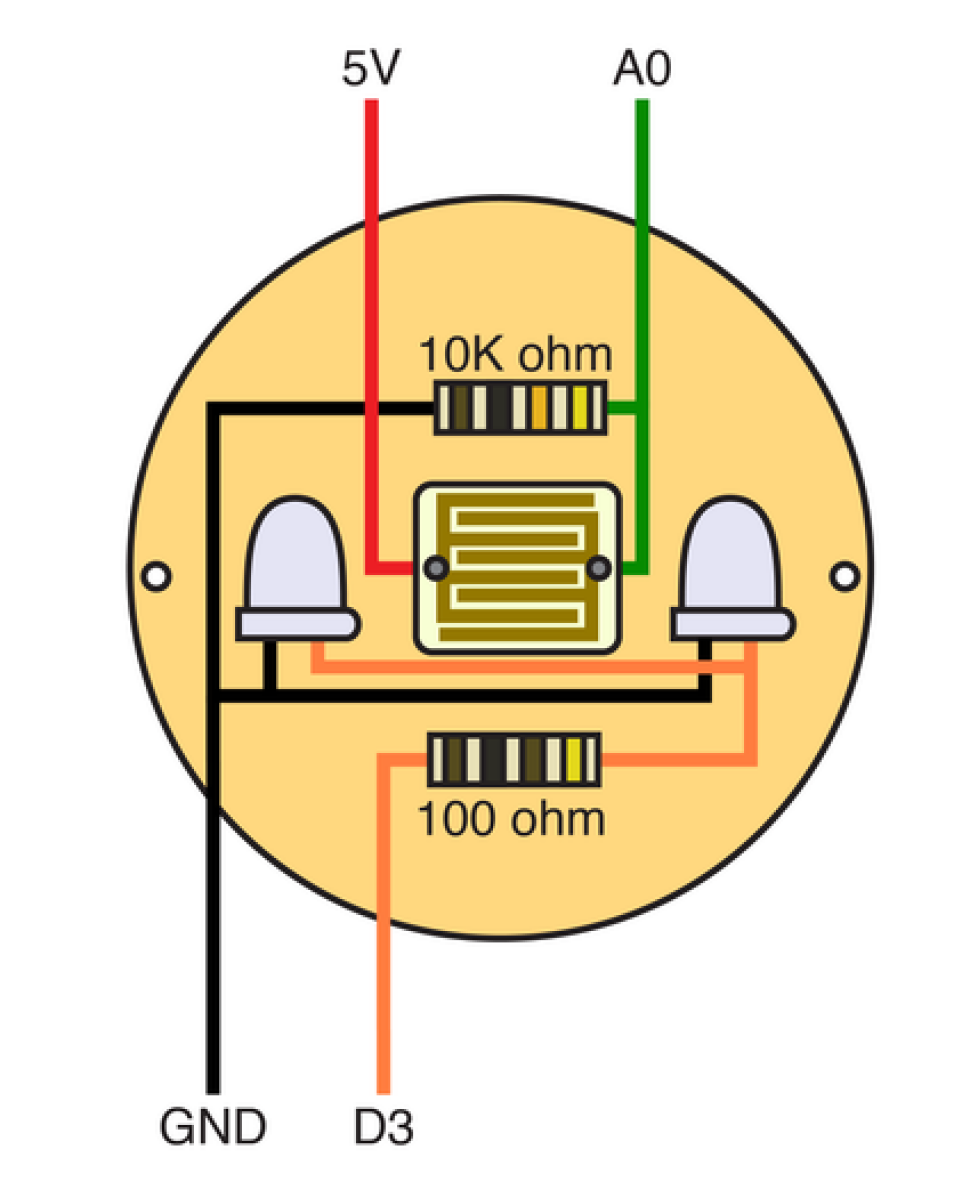
Schemat sensora krawędzi pokazano na rysunku 2. Moduł składa się z dwóch niezależnych obwodów. Pierwszym z nich są diody LED, które są podłączane równolegle do cyfrowego pinu wyjściowego z Arduino (w tym przypadki pin D3), przez opornik 100 Ω. Pozwala to na włączanie i wyłączanie oświetlenia w sensorze. Arduino będzie faktycznie wykonywało dwa pomiary jasności – pierwszy będzie wykonywany przy zapalonych diodach, a drugi przy zgaszonych. Aby to zrobić, mikrokontroler musi mieć możliwość przełączania diod LED.
int sensorLEDoff; // Pomiar przy wyłączonych LEDach
int sensorLEDon; // Pomiar przy włączonych LEDach
int compareValue; // Zmienna do obliczania różnicy pomiędzy pomiarami
void loop() {
edgeDetect();
if (compareValue > 100) {
forward();
}
else {
backOff(); // Funkcja do wycofywania się
}
}
void edgeDetect(){ // Funkcja detekcji krawędzi
sensorLEDoff = analogRead(A0); // Pomiar napięcia na pinie A0 przy wyłączonych LEDach
delay(10);
digitalWrite(3, HIGH); // Zapalenie LEDów
delay(5);
sensorLEDon = analogRead(A0); // Pomiar napięcia na pinie A0 przy włączonych LEDach
digitalWrite(3, LOW); // Wyłączenie LEDów
compareValue = abs(sensorLEDon - sensorLEDoff);
// Wyliczenie różnicy pomiędzy pomiarami
delay(50);
}
Drugą częścią czujnika jest fotorezystor, podłączany do analogowego pinu wejściowego. Jest on czujnikiem rezystancyjnym, co oznacza, że jego rezystancja zmienia się w zależności od tego, ile pada na niego światła. Fotoopornik jest częścią dzielnika napięcia, złożonego jeszcze z opornika 10 kΩ. Dzielnik zasilany jest z napięcia 5 V, a zmiana rezystancji powoduje zmianę napięcia mierzonego przez wejście A0. Kod Arduino, potrzebny do wykrycia krawędzi z pomocą wejścia analogowego, pokazany jest na listingu 4.

Gotowy sensor zaprezentowano na fotografii 7. Należy umieścić go pod robotem na płycie CD, pełniącej rolę wspornika detektora kolizji, jak pokazano na fotografii 8.

Czujnik odległości
Większość elementów, które do tej pory zamontowano w robocie, obejmuje nawigację zabezpieczającą robota przed bezpośrednim niebezpieczeństwem takim jak zderzenie, czy upadek z krawędzi. Czujnik odległości ma inne zastosowanie, gdyż służy do wykrywania rzeczy w większej odległości, dzięki czemu robot może podejmować świadome decyzje o tym, jak poruszać się dalej.
Czujnikiem, który zastosowano w tym projekcie, jest ultradźwiękowy sensor odbiciowy. Działa na podobnej zasadzie jak czujnik wykrywania krawędzi, ponieważ wysyła sygnał – w tym przypadku ultradźwięki, a nie światło z diody LED – a następnie mierzy, ile czasu potrzeba impulsowi, aby się odbić i wrócić do sensora. Obliczając, ile czasu zajmuje powrót i znając prędkość dźwięku w powietrzu, można obliczyć jaka odległość dzieli sensor od obiektu, od którego dźwięk się odbił.
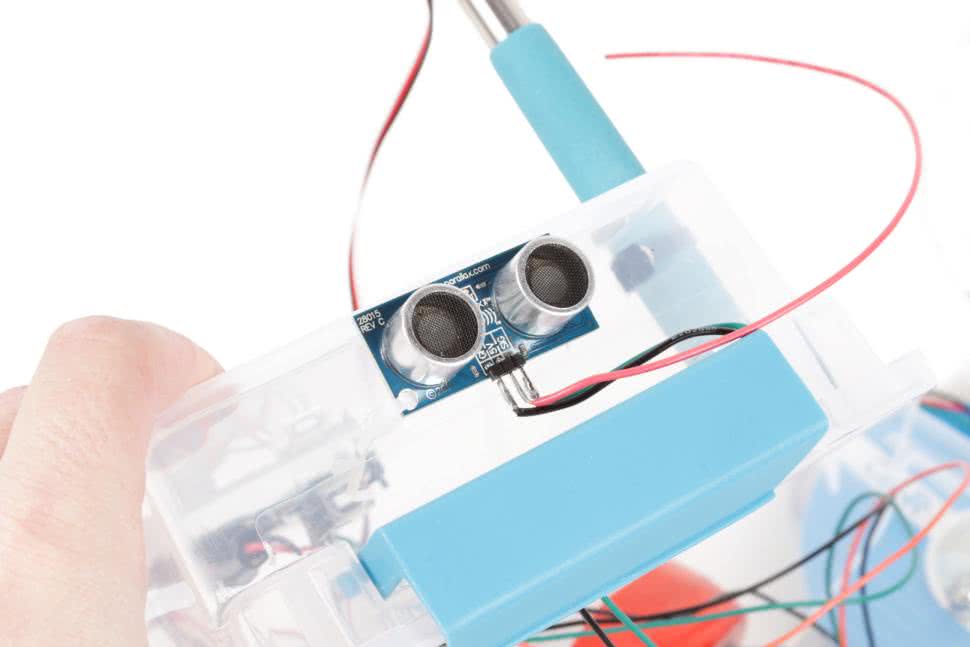
Czujnik, pokazany na fotografii 9, działa na odległość do około 4 metrów i zapewnia rozsądną dokładność pomiaru, przy tak dużym obszarze. Zastosowanie go, pomaga nie tylko w unikaniu obiektów, może również służyć do uzyskania lepszej orientacji w przestrzeni. Ma za zadanie zapobiegać aktywacji detektorów kolizyjnych – mają one być bardziej niezawodnym i awaryjnym elementem, a nie podstawowymi środkami interakcji ze światem.
long duration; // Czas przelotu impulsu
long inches; // Odległość w calach
void distanceMeasurement(){ // Funkcja do pomiaru odległości
// Sensor jest uruchamiany stanem wysokim na wejściu przez dłużej niż 2 mikrosekundy
pinMode(4, OUTPUT); // Ustawienie pinu 4 jako wyjście
digitalWrite(4, LOW); // Ustawienie stanu niskiego
delayMicroseconds(2);
digitalWrite(4, HIGH); // Ustawienie stanu wysokiego
delayMicroseconds(5); // Opóźnienie co najmniej 2 mikrosekund
digitalWrite(4, LOW);
// Ten sam pin używany jest do odczytu.
// Sensor wystawia impuls o czasie trwania przelotu
pinMode(4, INPUT); // Ustawienie pinu 4 jako wejście
duration = pulseIn(4, HIGH); //
inches = microsecondsToInches(duration); // Konwersja czasu do odległości w calach
}
long microsecondsToInches(long microseconds) {
// Zgodnie z kartą katalogową modułu, sygnał potrzebuje 73,746 mikrosekund, aby
// przebyć jeden cal. W ten sposób wyznaczana jest droga impulsu. Należy podzielić
// ją na pół, gdyż droga impulsu jest dwukrotnością odległości od przeszkody,
return microseconds / 74 / 2;
}
Sensor posiada trzy piny. Dwa z nich wykorzystane są do zasilania (5 V oraz GND), a trzeci należy podłączyć do pinu cyfrowego Arduino – w tym systemie podłączany jest do pinu 4. Funkcja mierząca odległość z pomocą tego sensora, zamieszczona jest na listingu 5.
Odbiornik kodów DTMF
Ostatnim elementem jest moduł do odbioru kodów DTMF, w postaci modułu Arduino Shield. Jest to rozszerzenie do Arduino, wykorzystuje zewnętrzny mikrofon do odbierania i analizowania kodów DTMF, jakie można przesyłać np. przez telefon lub Skype.
W omawianym projekcie moduł ten używany jest do sterowania robotem poprzez Skype. Po naciśnięciu na klawiaturę odpowiedniego klawisza, generowany i przesyłany jest kod DTMF. Robot odbiera ten dźwięk i reaguje na przesłany sygnał, odpowiednio się poruszając.

Aby podłączyć moduł Shield, należy odłączyć wszystkie dotychczasowo podłączone sygnały (pamiętaj, aby je oznaczyć) i umieścić moduł na swoim miejscu, jak pokazano na fotografii 10. Widoczny jest także sposób, w jaki podłączone są pozostałe sygnały. Do modułu DTMF dołączony jest mikrofon, który odbiera głos ze smartfona.
#include "dtmf.h" // Biblioteka do obsługi modułu DTMF
DTMF dtmf; // Inicjalizacja modułu DTMF
int myDtmf; // Zmienna do przechowywania kodów DTMF
void loop(){
myDtmf = dtmf.getDTMF(); // Odczytanie kodu DTMF
// W zależnośc od otrzymanego kodu, uruchamianesą różne funkcje,
// takie jak poruszanie się, ruch smartfonem etc.
switch(myDtmf){
case 2:
forward();
break;
case 8:
backward();
break;
case 4:
left();
break;
case 6:
right();
break;
case 7:
tiltUp();
break;
case 9:
tiltDown();
break;
default:
stopDriving();
break;
}
// Pauza na końcu pętli pomaga szkicowi działać płynnie
delay(10);
}
Jeśli chodzi o oprogramowanie modułu, jest ono oparte o dedykowaną bibliotekę dtmf.h, która jest do pobrania ze strony projektu (patrz link na końcu artykułu). Sposób zastosowania jej w kodzie pokazano na listingu 6.
Oprogramowanie
Na listingach 1…6 pokazano różne elementy, które składają się na w pełni funkcjonalnego robota. Kompletny szkic Arduino dla robota dostępny jest na stronie projektu oraz w materiałach dodatkowych do artykułu (listing 7).
/*
Robot do teleprezencji
Kompletny program
*/
// Wymagane do działania biblioteki
#include "dtmf.h"
#include <Servo.h>
DTMF dtmf; // Inicjalizacja modułu DTMF
int myDtmf; // Zmienna do przechowywania kodów DTMF
Servo StandardServo1; // Inicjalizacja standardowego serwomotoru
Servo ContinuousServo1; // Inicjalizaca serwomotorów z ruchem ciągłym
Servo ContinuousServo2;
int cameraPosition = 70; // Zmienna do zapisu pozycj kamery
int sensorLEDoff; // Pomiar przy wyłączonych LEDach
int sensorLEDon; // Pomiar przy włączonych LEDach
int compareValue; // Zmienna do obliczania różnicy pomiędzy pomiarami
int buttonState = HIGH; // Zmienna do przechowywania stanu przycisków
long duration; // Czas przelotu impulsu
long inches; // Odległość w calach
bool driving = false; // Zmienna stanu silników
void setup(){
// Konfiguracja przycisków i sensorów krawędzi
pinMode(2, INPUT);
pinMode(3, OUTPUT);
// Konfiguracja serwomotorów
StandardServo1.attach(5);
ContinuousServo1.attach(6);
ContinuousServo2.attach(7);
// Ustawienie domyślnej pozycji serwomotorów
StandardServo1.write(cameraPosition);
delay(2000);
ContinuousServo1.write(94);
ContinuousServo2.write(94);
// Uruchomienie portu szeregowego
Serial.begin(9600);
}
void loop(){
myDtmf = dtmf.getDTMF(); // Odczytanie kodu DTMF
switch(myDtmf){
case 2:
forward();
driving = true;
break;
case 8:
backward();
driving = true;
break;
case 4:
left();
driving = true;
break;
case 6:
right();
driving = true;
break;
case 7:
tiltUp();
driving = false;
break;
case 9:
tiltDown();
driving = false;
break;
default:
stopDriving();
driving = false;
break;
}
delay(10);
if(driving == true){ // Sprawdzenie czy robot jedzie
buttonState = digitalRead(2); // Sprawdzenie sensorów kolizji
if (buttonState == LOW) { // Reakcja na kolizję
backOff();
}
edgeDetect(); // Sprawdzenie sensora krawędzi
if (compareValue < 100) { // Reakcja na krawędź
backOff();
}
distanceMeasurement(); // OCena odległości
if(inches <10){ // Reakcja na zbyt blisko znajdujące się obiekty
backOff();
}
}
}
void distanceMeasurement(){
pinMode(4, OUTPUT);
digitalWrite(4, LOW);
delayMicroseconds(2);
digitalWrite(4, HIGH);
delayMicroseconds(5);
digitalWrite(4, LOW);
pinMode(4, INPUT);
duration = pulseIn(4, HIGH);
inches = microsecondsToInches(duration);
}
long microsecondsToInches(long microseconds) {
return microseconds / 74 / 2;
}
void edgeDetect(){
sensorLEDoff = analogRead(A0);
delay(10);
digitalWrite(3, HIGH);
delay(5);
sensorLEDon = analogRead(A0);
digitalWrite(3, LOW);
compareValue = abs(sensorLEDon - sensorLEDoff);
Serial.println(compareValue);
delay(50);
}
void backOff(){
stopDriving();
delay(1000);
StandardServo1.write(30);
delay(2000);
StandardServo1.write(70);
delay(2000);
backward();
delay(1000);
stopDriving();
delay(1000);
}
void tiltUp(){
if(cameraPosition < 120){
cameraPosition = cameraPosition + 1;
StandardServo1.write(cameraPosition);
}
}
void tiltDown(){
if(cameraPosition > 20){
cameraPosition = cameraPosition - 1;
StandardServo1.write(cameraPosition);
}
}
void stopDriving() {
ContinuousServo1.write(94);
ContinuousServo2.write(94);
}
void forward(){
ContinuousServo1.write(84);
ContinuousServo2.write(104);
}
void backward(){
ContinuousServo1.write(104);
ContinuousServo2.write(84);
}
void right(){
ContinuousServo1.write(104);
ContinuousServo2.write(104);
}
void left(){
ContinuousServo1.write(84);
ContinuousServo2.write(84);
}
Obsługa robota jest bardzo prosta. Wystarczy umieścić w nim smartfon z dostępem do Internetu i zainstalowanym Skype (na przykład).
Po połączeniu się z komunikatorem, można rozpocząć działanie – Skype przekazuje obraz i dźwięk w obie strony, a sterowanie ruchem robota zrealizowano za pomocą kodów DTMF. Robot reaguje na następujące kody:
- 2: jazda w przód,
- 4: skręt w lewo,
- 6: skręt w prawo,
- 8: jazda do tyłu,
- 7: pochylenie smartfona w dół,
- 9: pochylenie smartfona w górę.
Podsumowanie
Omówiony robot umożliwia teleobecność. Aplikacja na smartfonie odpowiedzialna jest za dwukierunkową transmisję obrazu i dźwięku, a możliwość poruszania się, dodatkowo poprawia wrażenie zdalnej obecności. System taki idealnie nadaje się do zastosowań, np. przy zdalnej inspekcji pomieszczeń itp. Tego rodzaju maszyny chętnie stosowane są obecnie np. w hospicjach czy szpitalach, aby ograniczać przenoszenie chorób.
Nikodem Czechowski, EP
Źrodło: http://bit.ly/3pue7hm