 Zaloguj
Zaloguj



- realizuje połączenie bezprzewodowe magistrali 1-Wire dla czujnika DS18B20,
- reaguje tylko na komendę 0xBE, czyli żądanie o zawartość „scratchpada”,
- współpracuje z systemami zasilanymi napięciem 3,3 lub 5 V,
- komunikacja radiowa w paśmie ISM o częstotliwości 868 MHz,
- wymaga zasilania 3,3 V
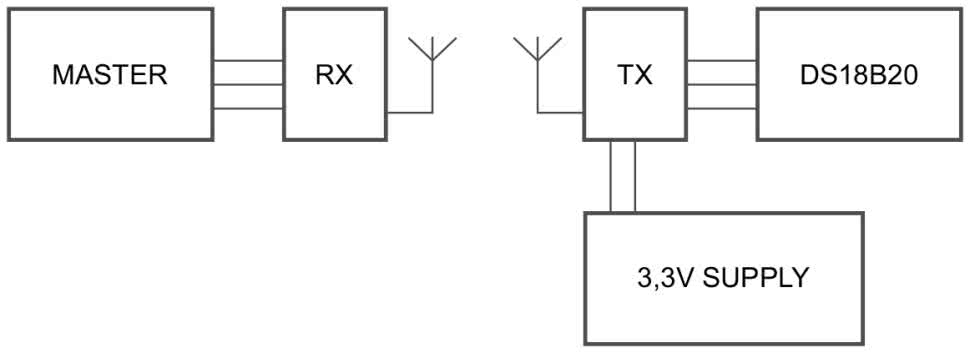
Wyobraźmy sobie sytuację, w której życzeniem klienta jest panel sterujący, np. wentylacją, umieszczony w jednym kącie pomieszczenia, a czujnik temperatury w zupełnie innym. Na poprowadzenie dodatkowych przewodów nie wyraża zgody. Jeśli w miejscu zamontowania czujnika znajduje się źródło zasilania, np. 12 VDC dla systemu automatycznych rolet, to nasz układ będzie idealnym rozwiązaniem do wybrnięcia z sytuacji. Idea działania jest prosta: jeden moduł (dalej nazywany nadajnikiem, TX) cyklicznie komunikuje się z układem DS18B20 i pozyskane informacje wysyła drogą radiową. Drugi moduł (odbiornik, RX) odbiera te informacje i przechowuje je w pamięci.
Podłączony jest w miejsce układu DS18B20 w urządzeniu nadrzędnym. Układ nadrzędny może w każdej chwili, przy użyciu zapytania zgodnego z protokołem 1-wire, zażądać informacji, a wtedy odbiornik przekaże dane, które otrzymał z nadajnika. Schemat blokowy takiego systemu pokazuje rysunek 1.
Ponieważ założono, że chodzi o „przedłużenie” jednego czujnika, układ reaguje tylko na jedną komendę: 0xBE, czyli żądanie o zawartość scratchpada (czyli 9 bajtowy blok danych zawierający podstawowe informacje, w tym wynik pomiaru). Pierwsze dwa bajty niosą informację o temperaturze, odczytanie tych wartości wystarczy do obliczenia wyniku. W ten sposób działają najprostsze algorytmy komunikacji z DS18B20, a jeden z nich (napisany w Arduino) można zobaczyć na listingu 1. Wszystkie komendy, poza zresetowaniem magistrali oraz wspomnianym wcześniej odczytem scratchpada, są przez układ pomijane.
Listing 1. Przykładowy kod odpowiadający za komunikację z czujnikiem DS18B20
onewire.reset();
onewire.write(0xCC, 0); //skip ROM
onewire.write(0x44, 0); //convert T
delay(750);
onewire.reset();
onewire.write(0xCC, 0); //skip ROM
onewire.write(0xBE, 0); //read scratchpad
data[0] = onewire.read();
data[1] = onewire.read();
temp = (data[0] + (data[1] * 256)) / 16;W układzie nie zaimplementowano mechanizmów sprawdzających wiarygodność danych otrzymanych drogą radiową. Podczas testów nie zdarzyły się przekłamania, które nie byłyby łatwe do wykrycia - prędzej łączność została całkowicie zerwana, co skutkowało wyzerowaniem bajtów scratchpada. Jeżeli jednak dana aplikacja wymaga wysokiej wiarygodności odczytywanych danych, należałoby dodać sprawdzanie sumy kontrolnej, która znajduje się w ostatnim bajcie scratchpada.
Budowa
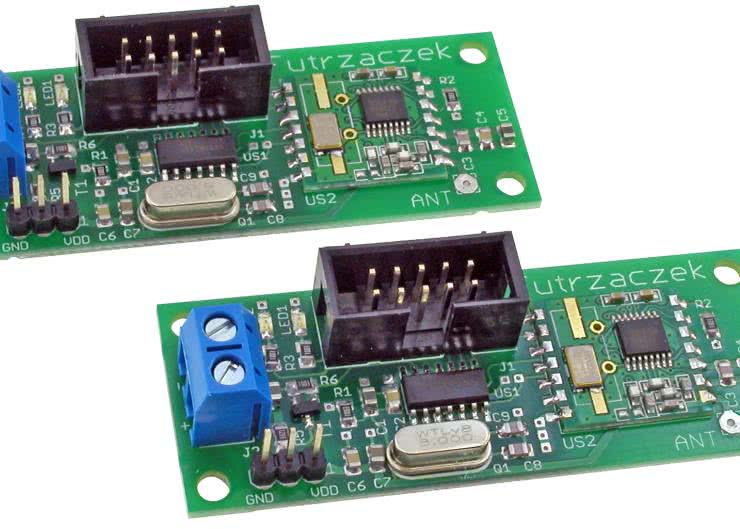
System przedłużający magistralę 1-wire drogą radiową składa się z dwóch modułów - nadawczego i odbiorczego - o identycznej budowie od strony elektrycznej. Różnica tkwi w oprogramowaniu. Schemat ideowy pojedynczego modułu znajduje się na rysunku 2. Układem zarządzającym pracą całego modułu, w tym komunikacją radiową, jest mikrokontroler Attiny24A. Jego zasilanie odsprzęgają dwa kondensatory, C1 i C2, umiejscowione blisko odpowiednich wyprowadzeń. Dodatkowy rezystor R1 podciąga wyprowadzenie RESET do napięcia +3,3 V, którym zasilany jest cały moduł.

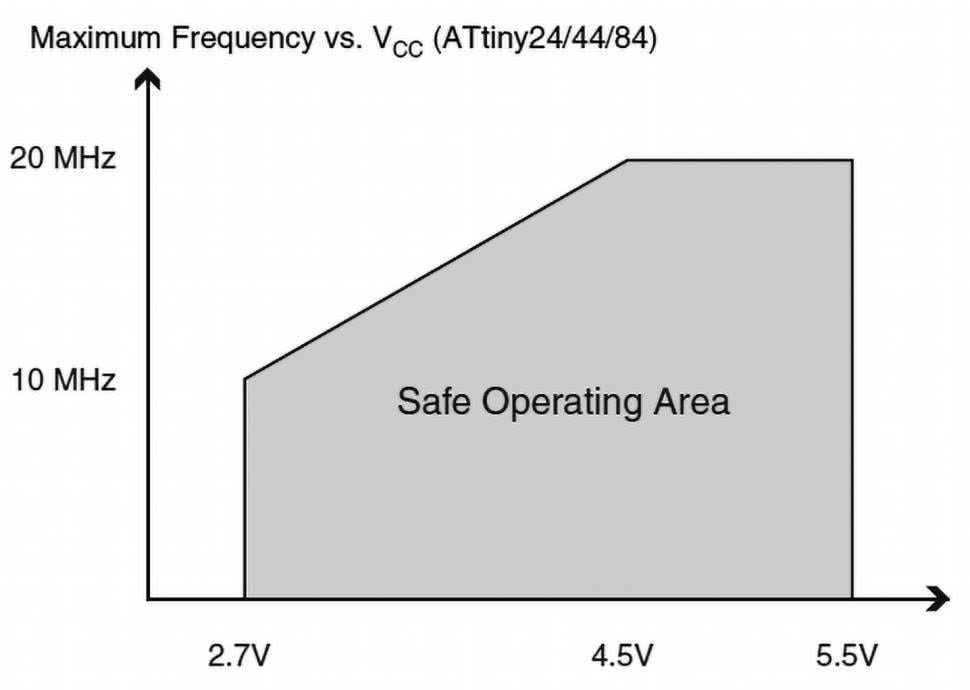
Magistrala 1-wire jest restrykcyjna pod względem zależności czasowych. Dlatego zdecydowano się na stabilizację zegara mikrokontrolera przy użyciu zewnętrznego rezonatora kwarcowego o częstotliwości 8 MHz. Taka, a nie wyższa, wartość częstotliwości została wymuszona relatywnie niskim napięciem zasilania - w tych warunkach, częstotliwość sygnału zegarowego nie może być większa niż ok. 10 MHz, na co wskazuje wykres z rysunku 3.
Komunikację bezprzewodową w paśmie ISM na częstotliwości 868 MHz realizuje gotowy układ RFM12B. Komunikuje się z mikrokontrolerem przy użyciu magistrali SPI. Ponieważ te same wyprowadzenia służą do programowania pamięci Flash w Attiny24, eliminacja kolizji została zrealizowana poprzez dodanie rezystora R2, który podciąga wyprowadzenie NSEL do dodatniej linii zasilania. Oznacza to, że wyprowadzenia dedykowane dla SPI są domyślnie w stanie wysokiej impedancji. Mikrokontroler w odpowiednich momentach ściąga potencjał tej linii do zera, co inicjuje możliwość komunikacji z RFM12B. Wyprowadzenie anteny znajduje się na polu lutowniczym PAD1.
Uznano, że wygodniej będzie dolutować zewnętrzną antenę w postaci odcinka przewodu o odpowiedniej długości niż borykać się z umiejscowieniem w obudowie płytki powiększonej o antenę wewnętrzną.
Złącze J1 służy do programowania pamięci Flash mikrokontrolera. Układ wyprowadzeń jest zgodny z typowym standardem ISP KANDA, do którego dedykowana jest większość niewielkich programatorów na złącze USB. Do wskazywania stanu pracy modułu służą dwie diody LED. W zależności od tego, czy jest to nadajnik, czy też odbiornik, ich świecenie bądź miganie ma różne znaczenie, co zostanie szerzej opisane w dalszej części artykułu.
Czujnik typu DS18B20 (w przypadku modułu nadajnika) lub dedykowany układ nadrzędny (w przypadku odbiornika) podłącza się do złącza J2. Jeżeli w systemie znajduje się rezystor podciągający na magistrali 1-wire, o odpowiedniej wartości, R5 należy wymontować.
Podwójna dioda Schottky typu BAT54S została użyta do zabezpieczenia delikatnego wejścia mikrokontrolera przed impulsami, które mogą indukować się w przewodzie sygnałowym. Przez większość czasu jest on obciążony relatywnie wysoką impedancją (rzędu kΩ), więc mogą występować zakłócenia.
Cały układ pracuje pod napięciem 3,3 V, lecz zadziała poprawnie z układem nadrzędnym, zasilanym napięciem 5 V. Rezystor podciągający powinien być wówczas dołączony do wyższego napięcia. Dzięki temu, w stanie spoczynku, potencjał linii 1-wire wyniesie ok. 3,6 V (3,3 V napięcia zasilającego +0,3 V napięcie przewodzenia górnej diody D1). Taka wartość zostanie poprawnie zinterpretowana jako logiczna „1” zarówno przez moduł odbiornika, jak i układ nadrzędny, o ile próg detekcji tego poziomu logicznego leży dostatecznie nisko. Przykładowo, dla układu ATmega328 zasilanego napięciem 5 V wynosi 3 V, czyli cały system zadziała poprawnie.
Zasilanie dla modułu może zostać dołączone w dwóch miejscach: zarówno do złącza śrubowego typu ARK (J3), jak i szpilkowego (J2). Nie przewidziano stabilizatora napięcia, ponieważ zmniejszyłoby to uniwersalność płytki - w systemie nadrzędnym prawdopodobnie będzie odpowiednie napięcie 3,3 V. W przeciwnym razie do dyspozycji będzie napięcie zdecydowanie wyższe, które trzeba będzie obniżyć dodatkową przetwornicą impulsową (dla zmniejszenia strat mocy).
Montaż i uruchomienie
Oba moduły, nadajnik i odbiornik, realizowane są na tej samej płytce drukowanej o wymiarach 25×65 mm. Schemat płytki PCB wraz z rozmieszczeniem elementów pokazuje rysunek 4. Obsada elementów dla obu modułów jest identyczna, z ewentualną różnicą w postaci wspomnianego wcześniej rezystora R5. Po przylutowaniu elementów w obudowach do montażu powierzchniowego (SMD), na płytce powinien znaleźć się kwarc XTAL1 oraz wszystkie złącza. Na samym końcu polecam przylutować moduł RFM12B, aby nie uległ uszkodzeniu podczas montażu pozostałych części.

Prawidłowo zmontowane moduły nie wymagają czynności uruchomieniowych. Należy pamiętać o zamontowaniu anten. W najprostszym wykonaniu, funkcję anteny może pełnić odcinek przewodu w izolacji o długości ok. 17 cm - będzie anteną półfalową dla częstotliwości 868 MHz.
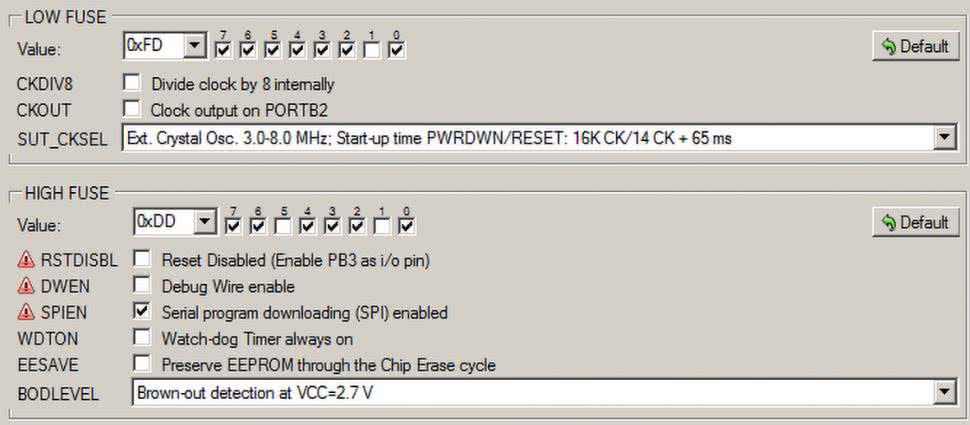
Po podłączeniu zasilania o napięciu 3,3 V (dobrze filtrowane i stabilizowane), mikrokontrolery w obu modułach należy zaprogramować wsadem pamięci Flash. Ponadto, należy zmienić ustawienia fusebitów na wartości:
Low Fuse = 0xFD
High Fuse = 0xDD
Szczegółowa konfiguracja jest widoczna na rysunku 5, gdzie znajduje się zrzut okna programu BitBurner. Ustawienie progu zadziałania BOD na 2,7 V zapobiegnie powstaniu błędów podczas uruchamiania, kiedy napięcie zasilające narasta zbyt wolno. Po tych czynnościach, moduły są gotowe do działania. Średni pobór prądu wynosi 27 mA dla modułu nadawczego oraz 14 mA dla modułu odbiorczego.
Eksploatacja
Po włączeniu zasilania nadajnika, z dołączonym czujnikiem DS18B20, co 750 ms następuje odczyt 9 bajtów scratchpada. Dwa pierwsze bajty zawierają informację o temperaturze z najwyższą dostępną rozdzielczością, tj. 12 bitów. Jednocześnie, co 100 ms uruchamiany jest nadajnik, który wysyła zawartość scratchpada. Tak częste transmisje służą eliminacji przypadkowego przekłamania, którego wyeliminowanie przy użyciu mechanizmu zwrotnych potwierdzeń byłoby skomplikowane w realizacji, a jednym z założeń projektu była prostota działania.
Diody LED1 i LED2 sygnalizują stan pracy modułu nadajnika. Opis sygnalizacji prezentuje tabela 1. Błąd komunikacji z dołączonym układem DS18B20 jest rozpoznawany poprzez brak prawidłowego sygnału obecności (presence), wystawianego przez czujnik po zresetowaniu magistrali.
| Dioda | Sygnalizacja | Opis |
| LED1 | Krótkie mignięcia | DS18B20 działa prawidłowo |
| LED1 | Świecenie ciągłe | Błąd komunikacji z DS18B20 |
| LED2 | Bardzo krótkie mignięcia | Praca nadajnika radiowego |
Odbiornik cały czas nasłuchuje danych emitowanych przez nadajnik oraz reaguje na zapytania układu nadrzędnego wysyłane magistralą 1-wire. Jego działanie różni się od modułu nadawczego, dlatego diody LED również mają odmienne znaczenie - tabela 2. Dioda LED1 zaświeca się, kiedy przez min. 1,5 s nie zarejestrowano transmisji z nadajnika. Transmisja realizowana jest co 100 ms i każde poprawnie odebrane dane powodują zerowanie licznika czasu. Odbiornik nie weryfikuje poprawności odebranych danych, jest to zadanie układu nadrzędnego. Obserwując mignięcia diody LED2 można zauważyć, że komunikacja odbiornika z układem nadrzędnym przebiega prawidłowo. Opisany układ nie reaguje na takie komendy jak Search ROM (0xF0) czy Write Scratchpad (0x4E). Realizuje tylko podstawowy cel, czyli umożliwia odczyt danych z czujnika DS18B20 za pośrednictwem drogi radiowej.
| Dioda | Sygnalizacja | Opis |
| LED1 | Świecenie ciągłe | Brak sygnału z nadajnika |
| LED2 | Bardzo krótkie mignięcia | Wysłanie scratchpada po magistrali 1-wire |
Dla dociekliwych
Magistrala 1-wire stawia ostre wymagania czasowe wobec dołączonych układów. Bezpośrednie przesyłanie stanów logicznych drogą radiową jest niemożliwe, ponieważ w krytycznych przypadkach, decyzja o stanie magistrali musi zostać podjęta w ciągu pojedynczych mikrosekund. Użyte moduły RFM12B są do tego zdecydowanie zbyt wolne (chociażby ze względu na konieczność przełączania pomiędzy nadawaniem a odbiorem), toteż zdecydowano o emulacji urządzenia 1-wire po stronie odbiornika. Zanim przejdziemy do omówienia kodów źródłowych, zastanówmy się nad zasadą działania tej magistrali. Można tu wyróżnić dwa typy przesyłanych informacji. Pierwszym jest inicjalizacja (reset) wszystkich urządzeń podrzędnych, którego przebieg czasowy jest widoczny na rysunku 6.
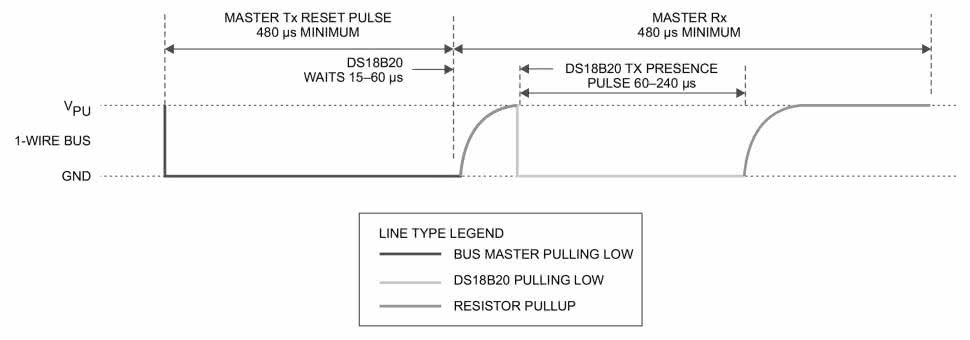
Najpierw układ nadrzędny wymusza stan niski na linii, zaś potem czynią to układy podrzędne, po odczekaniu pewnego czasu. Taka „odpowiedź” jest dla układu nadrzędnego znakiem, że ma podłączonych działających „rozmówców”. Zatem należy sprawdzić stan linii 1-wire po min. 60 μs (powinien być niski), a potem jeszcze raz, po min. 240 μs - wtedy stan logiczny powinien wrócić do wysokiego. Cała procedura musi trwać min. 960 μs.
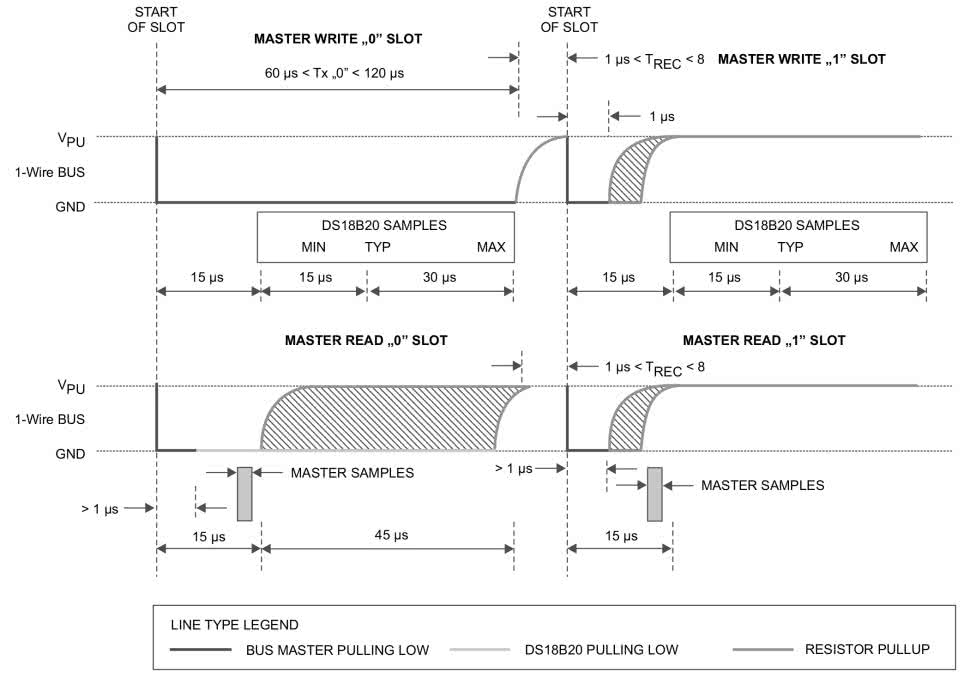
Do przesyłu komend i danych stosowany jest inny rodzaj transmisji, szczegóły przedstawia rysunek 7. Jest różny w zależności od kierunku transmisji. Urządzenie nadrzędne zawsze rozpoczyna bit. Kiedy nadaje, długość trwania stanu niskiego determinuje znaczenie bitu:
- poniżej 15 μs, jest to logiczna „1”
- od 60 μs do 120 μs, jest to logiczne „0”
Układy podrzędne sprawdzają stan linii po 15...60 μs (typowo 30 μs) od zarejestrowania zbocza opadającego. Krótki impuls zdąży się w tym czasie zakończyć i stan linii wyniesie powróci do „1”. Dłuższy impuls zostanie zaś zinterpretowany w tym momencie jako „0”.
Wysyłka bitów przez urządzenie podrzędne (poprzedzona odpowiednią komendą) polega na tym, że urządzenie nadrzędne wystawia zbocza opadające. Jeżeli układ podrzędny ma wysłać „1”, wówczas nie robi nic i po ok. 10...13 μs od rozpoczęcia impulsu, stan logiczny linii zdąży powrócić do stanu wysokiego, co rejestruje układ nadrzędny. Jeżeli zaś ma zostać wysłane „0”, układ podrzędny „przeciąga” uchwycone zbocze opadające do 15 μs, po czym zwalnia linię. Układ nadrzędny, który w tym czasie sprawdza stan linii, odczyta „0”. Co istotne, to układ nadrzędny decyduje o tym, ile bitów odczyta. Cały scratchpad składa się z 9 bajtów (tabela 3), lecz nic nie stoi na przeszkodzie, by odczytać tylko pierwsze dwa - tyle wystarczy do odczytu temperatury. Użyteczny może być również ostatni bajt - zawiera sumę kontrolną (CRC), dzięki której można dowiedzieć się, czy otrzymana informacja jest poprawna.
| Numer bajtu | Znaczenie |
| 0 | Temperatura - młodsza część |
| 1 | Temperatura - starsza część |
| 2 | Górny próg alarmu temperatury (z EEPROM) |
| 3 | Dolny próg alarmu temperatury (z EEPROM) |
| 4 | Bajt konfiguracyjny |
| 5 | Wartość stała = 255 (0xFF) |
| 6 | Zarezerwowany |
| 7 | Wartość stała = 16 (0x10) |
| 8 | CRC (suma kontrolna) |
Obsługa magistrali 1-wire, którą trzeba było zaimplementować w nadajniku, jest dobrze znana i opisana w wielu miejscach. Ponieważ pracy nadajnika nie zaburzają jakiekolwiek przerwania zewnętrzne, można było zrealizować ją za pomocą zwykłych opóźnień typu delay(). Długości trwania opóźnień dobrano doświadczalnie, za pomocą oscyloskopu, aby zgadzały się z tymi, których wymaga nota katalogowa układu. Kod został napisany w języku C, istotne fragmenty pokazuje listing 2.
Listing 2. Obsługa urządzenia nadrzędnego, kluczowe fragmenty kodu
//sygnał RESET
uint8_t reset_pulse(void){ //1 - układ obecny, 0 - błąd
uint8_t presence;
LOW_1WIRE;
CLEAR_1WIRE;
_delay_us(480); //nadaj sygnał RESET, min. 480us
SET_1WIRE; //zwolnij linię
_delay_us(60); //odczekaj na odpowiedź, min. 60us
//weryfikacja odpowiedzi
if(IS_LOW){presence = 1;} else {presence = 0;}
_delay_us(440); //odczekaj na zanik odpowiedzi
//weryfikacja po zaniku
if(IS_HIGH && presence){presence = 1;}
else {presence = 0;}
return presence;
}
//nadanie jednego bitu
void send_bit(uint8_t bit){
LOW_1WIRE;
CLEAR_1WIRE;
_delay_us(1); //nadaj 1 krótkim impulsem
if(bit == 1){ SET_1WIRE; }
_delay_us(70); //nadaj 0 dłuższym impulsem
SET_1WIRE;
}
//odbiór jednego bitu
uint8_t read_bit(void){
uint8_t bit;
LOW_1WIRE;
//wystaw zbocze opadające na krótką chwilę
CLEAR_1WIRE;
_delay_us(1);
SET_1WIRE; //zwolnij linię
//odczekaj na ew. „przeciągnięcie” impulsu przez czujnik
_delay_us(10);
if(IS_HIGH){bit = 1;} else {bit = 0;} //sprawdź stan
_delay_us(40); //uzupełnienie całego
return bit;
}
//nadanie jednego bajtu
void send_byte(uint8_t byte){
uint8_t i=8;
while(i--){
send_bit(byte&1);
byte>>=1;
}
}
//odbiór jednego bajtu
uint8_t read_byte(void){
uint8_t byte = 0;
uint8_t i=8;
while(i--){
byte>>=1;
byte|=(read_bit()<<7);
}
return(byte);
}Problem stanowiła emulacja urządzenia podrzędnego. Tutaj konieczne było użycie przerwania sprzętowego do wykrywania zboczy opadających. Ponadto, w przerwaniach nie należy używać funkcji opóźniających, więc odmierzanie czasu trzeba było zrealizować z zastosowaniem liczników, zwłaszcza, że równocześnie może trwać odbiór danych z nadajnika. Rozwiązano to za pomocą prostej maszyny stanów, której najważniejsze fragmenty kodu znajdują się na listingu 3. Widoczna jest obsługa przerwań, deklaracja zmiennych i stałych oraz inicjalizacja liczników i przerwania zewnętrznego.
Listing 3. Emulacja urządzenia podrzędnego, kluczowe fragmenty
//definicje wymagań czasowych dot. magistrali 1-wire [us]
#define TIME_RESET_PULSE 480
#define TIME_WAIT_AFTER_RESET_PULSE 30
#define TIME_PRESENCE_PULSE 120
#define TIME_ZERO_MIN 60
#define TIME_ZERO_MAX 120
#define TIME_ZERO_SEND 15
//definicje czasów odmierzanych Timerem1
#define TCNT1_SAMPLE 65535-30
#define TCNT1_WAIT_AFTER_RESET_PULSE 65535-30
#define TCNT1_PRESENCE_PULSE 65535-120
//definicje czasów timeout odmierzanych Timerem0
#define TIMEOUT_15MS 255-234
//definicje kolejnych stanów układu
//stan spocznkowy - oczekiwanie na sygnał RESET
#define STATE_IDLE 0
//oczekiwanie na zakończenie impulsu RESET od mastera
#define STATE_RESET_WAIT 1
#define STATE_SEND_PRESENCE 2 //wysłanie impulsu PRESENCE
#define STATE_AFTER_RESET 3 //oczekiwanie na rozkazy po resecie
#define STATE_SEND 4 //wysyłanie bajtów na magistralę
volatile uint8_t state = STATE_IDLE;
volatile uint8_t read_bit_cnt = 0; //licznik odczytanych bitów
volatile uint8_t read_byte = 0; //bajt tworzony z kolejnych bitów
volatile uint8_t read_byte_ready = 0; //gotowy, odczytany bajt
//licznik do odbioru kolejnych bajtów scratchpada
volatile uint8_t rec_cnt;
volatile uint8_t send_bit_cnt = 0; //numer bitu do wysyłki
volatile uint8_t send_byte_cnt = 0; //numer bajtu do wysyłki
volatile uint8_t send_scratch[10] = {0}; //kompletny scratchpad
// INT0 do obsługi 1-wire
ISR(INT0_vect)
{
if(IS_LO){ //jeżeli jest stan niski na linii 1-wire
//jeżeli trwa wysyłka bajtów scratchpada
if(state == STATE_SEND){
LED_STAT_1; //załącz diodę STAT
//jezeli ma zostać nadane zero
if((send_scratch[send_byte_cnt] & (1<<send_bit_cnt)) == 0){
WIRE_LO;
TCNT1 = 0;
//przeciagnij impuls do 15us
while(TCNT1 < TIME_ZERO_SEND);
WIRE_HI;
}
send_bit_cnt++; //przesun wysylany bit o 1
//po wysłaniu całego bitu, przejdą do następnego bajtu
if(send_bit_cnt > 7){ send_byte_cnt++; send_bit_cnt = 0;}
//po wysłaniu wszystkich bajtów, wróć do stanu IDLE
if(send_byte_cnt > 8){ state = STATE_IDLE; LED_STAT_0; }
}
//w stanie spoczynku wyczyść Timer1 i
if(state == STATE_IDLE){TCNT1 = 0; LED_STAT_0;} wyłącz diodę STAT
//jeżeli magistrala jest zainicjowana,
//odmierzaj czas do zbierania próbek
if(state == STATE_AFTER_RESET){ TCNT1 = TCNT1_SAMPLE; }
TCNT0 = TIMEOUT_15MS; //wyzeruj licznik timeout
}
if(IS_HI) { //jeżeli jest stan wysoki
//jeżeli wykryto impuls RESET o prawidlowej długości (od mastera)
if(TCNT1 >= TIME_RESET_PULSE && state == STATE_IDLE) {
//przełącz stan na oczekiwanie do wygenerowania własnego
state = STATE_RESET_WAIT; impulsu (presence)
//oczekiwanie na wygenerowanie własnego impulsu
TCNT1 = TCNT1_WAIT_AFTER_RESET_PULSE;
//wyzeruj licznik odebranych bitów
read_bit_cnt = 0;
read_byte = 0; //wyzeruj odebrany bajt
//wyzeruj licznik timeout
TCNT0 = TIMEOUT_15MS;
}
}
}
// Tim1 do odmierzania czasu nadawanych
//i odbieranych impulsów impulsów
ISR(TIM1_OVF_vect){
//po pelnym resecie: układ jest gotowy do odbioru komendy
if(state == STATE_AFTER_RESET){
TCNT0 = TIMEOUT_15MS; //wyzeruj licznik timeout
//master wysyła 1, jeżeli 0 to nie rób nic
if(IS_HI){read_byte |= (1 << read_bit_cnt);}
//zainkrementuj licznik odebranych bitów
read_bit_cnt++;
//jeżeli zebrano cały bajt
if(read_bit_cnt > 7) {
//wyzeruj licznik odebranych bitów
read_bit_cnt = 0;
//przekopiuj gotowy bajt
read_byte_ready = read_byte;
//wyzeruj odebrany bajt
read_byte = 0;
//jeżeli odebrano komendę odczytu scratchpada
if(read_byte_ready == 0xBE) {
state = STATE_SEND;
send_bit_cnt = 0;
send_byte_cnt = 0;
}
}
}
//po wyslaniu sygnalu presence
if(state == STATE_SEND_PRESENCE) {
//przejdą w tryb odbioru
state = STATE_AFTER_RESET;
WIRE_HI; //zwolnij liniê
}
//po odczekaniu, nadaj sygnal presence
if(state == STATE_RESET_WAIT) {
state = STATE_SEND_PRESENCE;
TCNT1 = TCNT1_PRESENCE_PULSE;
WIRE_LO;
}
}
// Tim0 do odmierzania czasu timeout
ISR(TIM0_OVF_vect){
//jezeli doszlo do przepelnienia tego
//licznika, wroc do stanu IDLE
state = STATE_IDLE;
}
int main(void) //pętla główna
{
//przerwania od przepelnienia
TIMSK1 |= (1 << TOIE1);
//Timer1 odlicza co 1us, preskaler 8
TCCR1B |= (1 << CS11);
TCNT1 = 0;
//przerwania od przepelnienia
TIMSK0 |= (1 << TOIE0);
//Timer0 odlicza co 64us, preskaler 256
TCCR0B |= (1<<CS02);
TCNT0 = 0;
//przerwania zboczem narastajıcym i opadajıcym od INT0
MCUCR |= (1<<ISC00);
GIMSK |= (1 << INT0);
sei();
}W stanie spoczynku (IDLE), układ oczekuje na zbocze opadające. W momencie detekcji zerowany jest Timer1. Kiedy wystąpi zbocze narastające, sprawdzany jest stan licznika. Jeżeli był to prawidłowy impuls (tj. o długości min. 480 μs), układ przechodzi do generacji impulsu obecności (presence) po odczekaniu ustalonego czasu.
Odbiór danych jest możliwy po wykonaniu pełnej sekwencji inicjalizacji magistrali. Na zboczach opadających jest zadawana wartość licznika Timer1, który, w momencie przepełnienia, sprawdza stan linii 1-wire, odczytując w ten sposób wartość odebranego bitu. Jeżeli odebrana sekwencja bitów jest bajtem komendy odczytu zawartości scratchpad, układ przechodzi w stan gotowości do wysyłki danych. Każde zbocze opadające generowane przez urządzenie nadrzędne na linii 1-wire, jest analizowane pod kątem ewentualnego przedłużenia do długości odpowiadającej bitowi o wartości „0”.
Licznik Timer0 odpowiada za automatyczny powrót układu do stanu spoczynku. Podczas komunikacji z układem nadrzędnym, jego wartość jest ustawiana tak, aby uległ przepełnieniu po 15 ms. Jeżeli na linii 1-wire nic się nie wydarzy, to układ przejdzie do stanu początkowego (idle), więc jego działanie można porównać do układu watchdog. Ten licznik przepełnia się cyklicznie również w stanie oczekiwania, więc przywróci układ do tego stanu w razie niespodziewanego pojawienia się stanu niskiego na linii - spowodowanego np. zakłóceniem.
Przedstawione programy można rozbudować np. o obsługę komendy porównania ROM (Match ROM), która stanowi bazę umożliwiającą prawidłowy odczyt temperatury z czujnika oraz emulację jego dwóch najważniejszych funkcji.
Michał Kurzela, EP
- R1, R2, R6: 100 kΩ SMD0805
- R3, R4: 330 Ω SMD0805
- R5: 3,3 kΩ SMD0805 (opis w tekście)
- C1, C5, C7, C10: 10 μF/10 V SMD0805
- C2, C4, C6: 10 nF SMD0805
- C3 : 47 pF SMD0805
- C8, C9: 15 pF SMD0805
- D1: BAT54S SOT23
- LED1: LED zielona SMD0805
- LED2: LED czerwona SMD0805
- US1: Attiny24A SO14
- US2: RFM12B 868 MHz SMD
- J1: IDC 10pin 2,54 mm proste
- J2: goldpin męski 3 pin 2,54 mm
- J3: ARK2/500












