 Zaloguj
Zaloguj



- pomiar czasu w przedziale 0…999 999 godzin,
- możliwość zliczania w górę lub w dół, od zadanej wartości do zera,
- zadawanie wartości progowej, po której następuje załączenie przekaźnika,
- możliwość wyboru rodzaju bodźca uaktywaniającego odmierzanie: załączenie zasilania układu lub wykrycie poboru prądu przemiennego o dostatecznie wysokim natężeniu,
- możliwość regulacji progu detekcji prądu,
- nastawy przechowywane w nieulotnej pamięci EEPROM,
- zewnętrzne wejście zerujące + przycisk monostabilny na płytce,
- dwa wyjścia (NO i NC) przekaźnika o obciążalności do 8 A,
- alfanumeryczny wyświetlacz LCD o organizacji 2 wiersze po 16 kolumn,
- zasilanie napięciem stałym 12 V (lub 24 V po modyfikacji).
– Panie majster, ta tokarka coś rzęzić zaczyna, kiedy ona była w serwisie?
– Y, no ten… W zeszłym roku, patrząc po fakturach. Licząc dziennie po jakieś cztery godziny pracy, po pięć dni w tygodniu, to minęło coś koło…
– No to będzie już tysiąc godzin? Bo tak mam w DTR. Panie majster, bo jak tu behapowiec wpadnie, to będzie lipa.
Po co się tak męczyć? Po to wynaleziono tranzystor, a potem całe mnóstwo innych elektronicznych cudeniek, aby sobie upraszczać życie, a nie je komplikować. Do czynności tak banalnej, a jednocześnie żmudnej, jak mierzenie czasu pracy jakiejś maszyny przemysłowej, wystarczą łatwo dostępne dzisiaj podzespoły. Ba, przedstawiony w tym artykule układ jest na tyle zaawansowany, że potrafi nawet zatrzymać dalszą pracę maszyny po upływie określonego czasu, jeżeli taka potrzeba by zachodziła.
Budowa
Schemat ideowy omawianego układu znajduje się na rysunku 1. Do pomiaru czasu i obsługi wyświetlacza służy mikrokontroler US2 typu ATmega8A. Ten popularny model procesora pozostaje w ciągłej produkcji, ponadto ma wystarczające peryferia do realizacji tego zadania. Jego rdzeń jest taktowany sygnałem o częstotliwości 4 MHz, dla którego wzorcem jest rezonator kwarcowy Q1. Wbudowany w mikrokontroler generator wzbudza drgania kryształu kwarcu, przez co układ może odmierzać czas z dużą dokładnością, co jest jego głównym zadaniem. Kondensatory 15 pF ułatwiają wzbudzenie oscylacji Q1. Nieopodal jego wyprowadzeń zasilania znajdują się cztery kondensatory, które filtrują napięcie zasilające z tętnień o szerokim widmie częstotliwościowym. Ich źródłem mogą być zarówno tranzystory wchodzące w skład struktury US2, jak i okoliczne elementy.
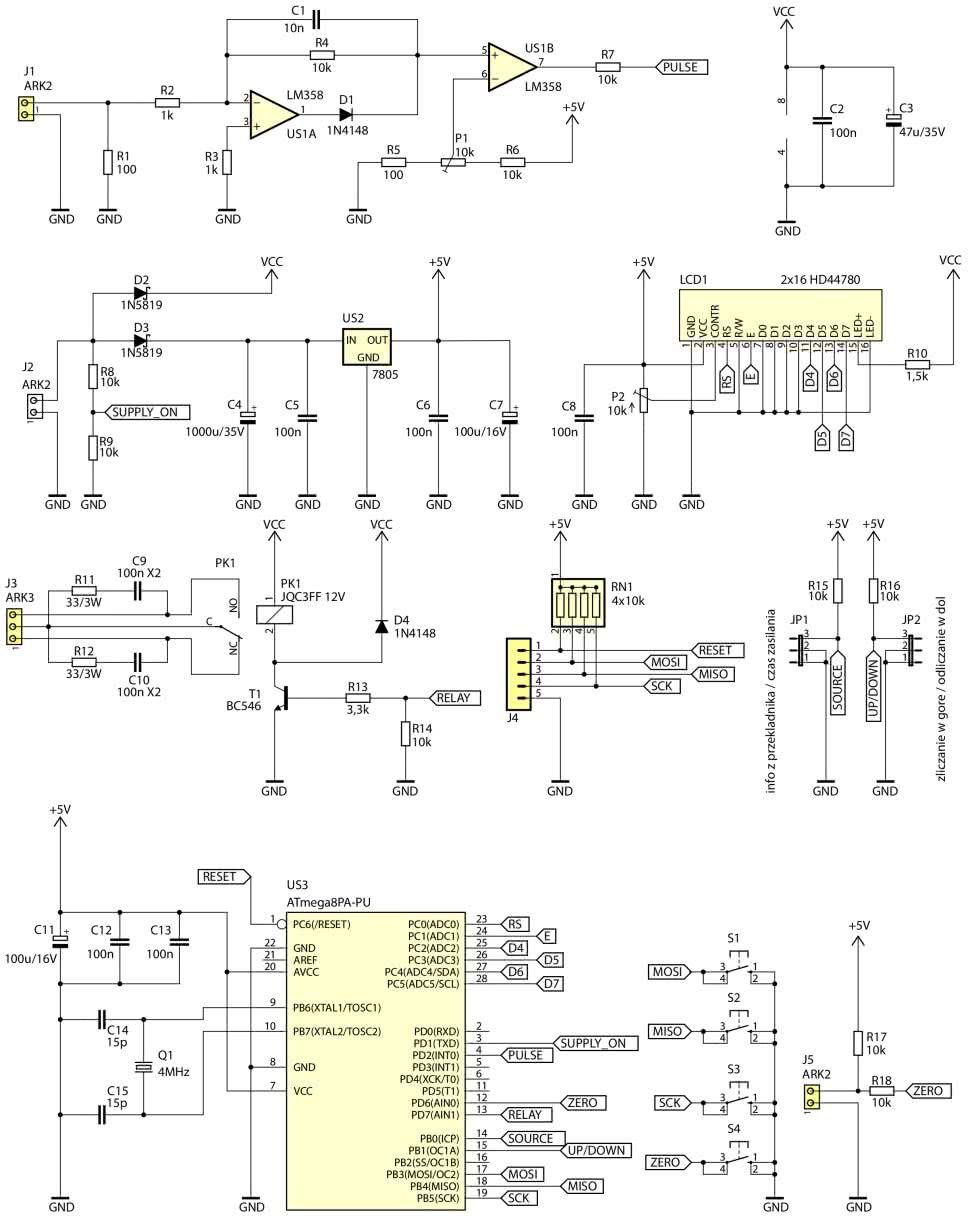
Aby móc wygodnie zadawać żądane wartości, w układzie znalazły się trzy przyciski monostabilne S1…S3. Wewnętrzne rezystory podciągające, które udostępnia mikrokontroler, zostały zrównoleglone dodatkowymi, znajdującymi się w strukturze drabinki RN1, co zwiększa odporność na zakłócenia. Do zaprogramowania pamięci Flash służy złącze J4, na które wyprowadzono sygnały interfejsu ISP, znanego z układów z rodziny AVR. Rezystory z drabinki RN1 ustalają ich potencjał względem masy, zapewniając tym samym możliwość rozładowania wyprowadzeń złącza J4 z nagromadzonych ładunków elektrostatycznych. Na płytce są również dwie zworki, JP1 i JP2, umożliwiające ręczny wybór trybu pracy, o czym dalej.
W prosty sposób zostało zabezpieczone wejście zerujące, którego zaciski znajdują się w złączu J5. Rezystor R18 zapewnia ograniczenie prądu diod zabezpieczających wejście mikrokontrolera, ponieważ w przewodach łączących płytkę z przyciskiem mogą indukować się zakłócenia. Rezystor R17 ustala napięcie między rozwartymi stykami odpowiadające wysokiemu stanowi logicznemu. Tę samą funkcję co styk zewnętrzny, spełnia również przycisk S4 znajdujący się na płytce – nie trzeba zatem koniecznie podłączać oddzielnego przycisku do zerowania.
Detekcja prądu pobieranego przez nadzorowane urządzenie jest realizowana przez przekładnik prądowy, podłączony do zacisków złącza J1. Zapewnia on bardzo dobrą izolację galwaniczną między układem a mierzonym obwodem. Generowany w jego uzwojeniu prąd odkłada na rezystorze R1 napięcie, które jest prostowane jednopołówkowo przez prosty układ zawierający wzmacniacz operacyjny US1A. Wzmocnienie tego prostownika wynosi –10 V/V dla połówek ujemnych oraz +1 V/V dla połówek dodatnich (ponieważ następuje zatykanie diody D1), więc tylko połówki ujemne grają tutaj główną rolę. Układ mógłby działać bez diody D1, lecz stanowi ona bardzo proste rozwiązanie problemu niezerowego napięcia wyjściowego wzmacniacza operacyjnego – po prostu musi ono wzrosnąć do około 600 mV, aby dioda zaczęła przewodzić, co będzie miało przełożenie na dalszą część układu. W przeciwnym wypadku, kiedy wyjście wzmacniacza operacyjnego próbuje osiągnąć potencjał możliwie bliski potencjałowi masy (w praktyce 20…30 mV), dioda pozostaje zatkana, a potencjał jej katody wynosi 0 V. Kondensator C1 zawęża pasmo przenoszenia prostownika aktywnego, przez co układ jest mniej wrażliwy na zakłócenia wywoływane przez impulsy pochodzące chociażby od iskrzących styków lub przetwornic impulsowych.
Tak uzyskany unipolarny sygnał napięciowy trafia na prosty komparator, którego funkcję pełni drugi wzmacniacz operacyjny US1B, znajdujący się w tej samej strukturze co US1A. Porównuje on wartość chwilową sygnału z wyjścia prostownika z napięciem stałym, ustalonym przez położenie ślizgacza potencjometru P1. Z uwagi na występujący offset napięciowy wzmacniacza operacyjnego zastosowano rezystor R5, który pozwala na ustawienie minimalnego napięcia wynoszącego około 25 mV. Odpowiada ono minimalnej wartości szczytowej sygnału, która spowoduje zadziałanie odmierzania czasu. Z kolei zbyt wysoka regulacja „w górę” zakresu byłaby po prostu niewygodna i dlatego zastosowano ograniczenie w postaci rezystora R6. Przy użytych wartościach elementów (jak na schemacie) przekłada się to na ustalenie progu zadziałania układu w przedziale od 0,24 A do 24 A wartości skutecznej pobieranego przez układ prądu, przy założeniu kształtu czysto sinusoidalnego. Możliwość regulacji progu zadziałania jest wygodna w sytuacji, kiedy nadzorowane urządzenie pobiera niewielki prąd w stanie spoczynku, niezaliczającym się do jego czasu pracy. Impulsy generowane przez komparator pobudzają wejście mikrokontrolera, a dopasowaniem potencjałów zajmuje się rezystor R7, na którym odkłada się nadmiar napięcia – płynący przez niego prąd jest odprowadzany do dodatniej linii zasilającej 5 V.
Napięcie zasilające układ należy podłączyć do zacisków złącza J2. Jego obecność jest wykrywana przez mikrokontroler poprzez detekcję wysokiego stanu logicznego na linii SUPPLY_ON. Diody D2 i D3 zapobiegają zasilaniu rezystorów R8 i R9 (tworzących dzielnik napięciowy) z kondensatorów elektrolitycznych w układzie, ponadto odcinają one przepływ prądu w przypadku pomylenia polaryzacji zasilania. Dioda D3 doładowuje kondensator elektrolityczny C4, którego pojemność jest relatywnie wysoka; zgromadzona w nim energia pozwoli układowi dokonać zapisu do nieulotnej pamięci EEPROM. Stabilizator liniowy typu 7805 dostarcza napięcie 5 V do układów cyfrowych. Moc strat na nim jest na tyle niska, że nie ma potrzeby stosowania przetwornicy impulsowej – jego metalowa wkładka wystarcza do odprowadzania ciepła. Z kolei drugi obwód, nieistotny po zaniku zasilania, jest zasilany poprzez diodę D2. Dostarcza ona prąd do podświetlenia wyświetlacza LCD1, wzmacniacza operacyjnego i cewki przekaźnika elektromagnetycznego PK1, które są nieużywane po zaniku napięcia zasilającego. Dlatego gałąź ta została oddzielona, aby nie obciążała niepotrzebnie kondensatora C4.
Użytkownik widzi informacje podawane przez układ na alfanumerycznym wyświetlaczu LCD1, który zawiera sterownik typu HD44780 (lub kompatybilny) o dwóch wierszach po szesnaście znaków. Potencjometrem P2 można ustawić kontrast wyświetlacza. Rezystor R10 pozwala na zasilanie jego podświetlenia niestabilizowanym napięciem wejściowym, nie obciążając tym samym stabilizatora US3 i kondensatora C4.
Wyjściem układu są zaciski złącza J3, do którego zostały doprowadzone wyprowadzenia styków normalnie otwartych (NO) oraz normalnie zamkniętych (NC) przekaźnika PK1. Rezystor 33 Ω i kondensator 100 nF (z dielektrykiem typu X2) tworzą prosty układ pochłaniający energię wydzielaną w momencie przełączania styków przekaźnika, kiedy może dochodzić do ich iskrzenia. Zmniejsza to ryzyko wystąpienia błędu w funkcjonowaniu układu, ponieważ redukcji ulega poziom emitowanych zakłóceń elektromagnetycznych. Zabezpieczone są w ten sposób zarówno styki NO, jak i NC.
Montaż i uruchomienie
Układ został zmontowany na dwustronnej płytce drukowanej o wymiarach 100 mm × 80 mm. Jej wzór ścieżek oraz schemat montażowy pokazano na rysunku 2. W odległości 3 mm od krawędzi płytki znalazły się cztery otwory montażowe, każdy o średnicy 3,2 mm.
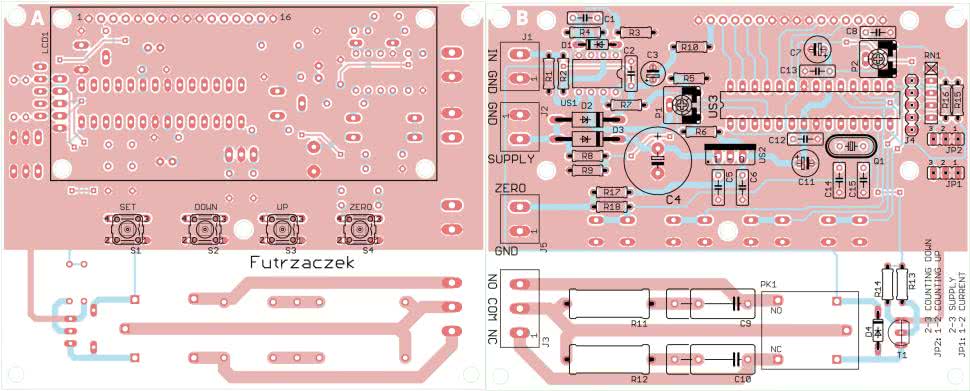
Dodatkowo, aby płytka nie uginała się podczas naciskania przycisków, w pobliżu środka płytki umieszczono piąty otwór.
Montaż proponuję rozpocząć od elementów o najmniejszej wysokości obudowy, czyli rezystorów i diod półprzewodnikowych. Pod układy scalone US1 i US3 warto zastosować podstawki. Ten etap montażu można zobaczyć na fotografii 1.
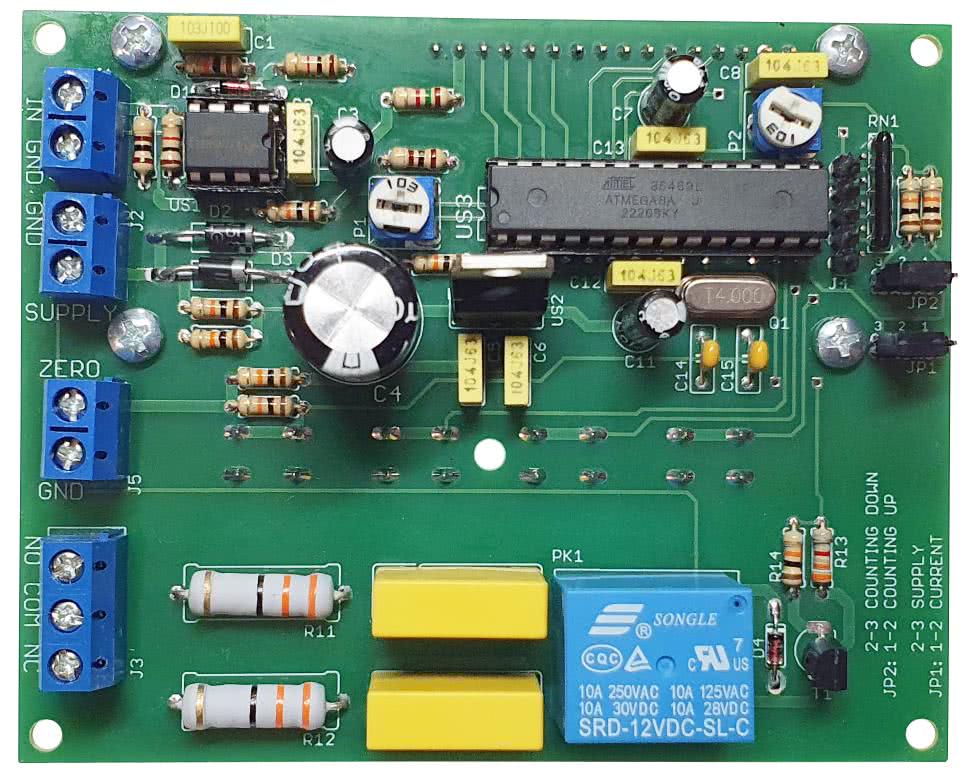
Na drugiej stronie płytki znajduje się miejsce na wyświetlacz LCD1 oraz cztery przyciski S1…S4. Ich lokalizację po przylutowaniu pokazuje fotografia 2.
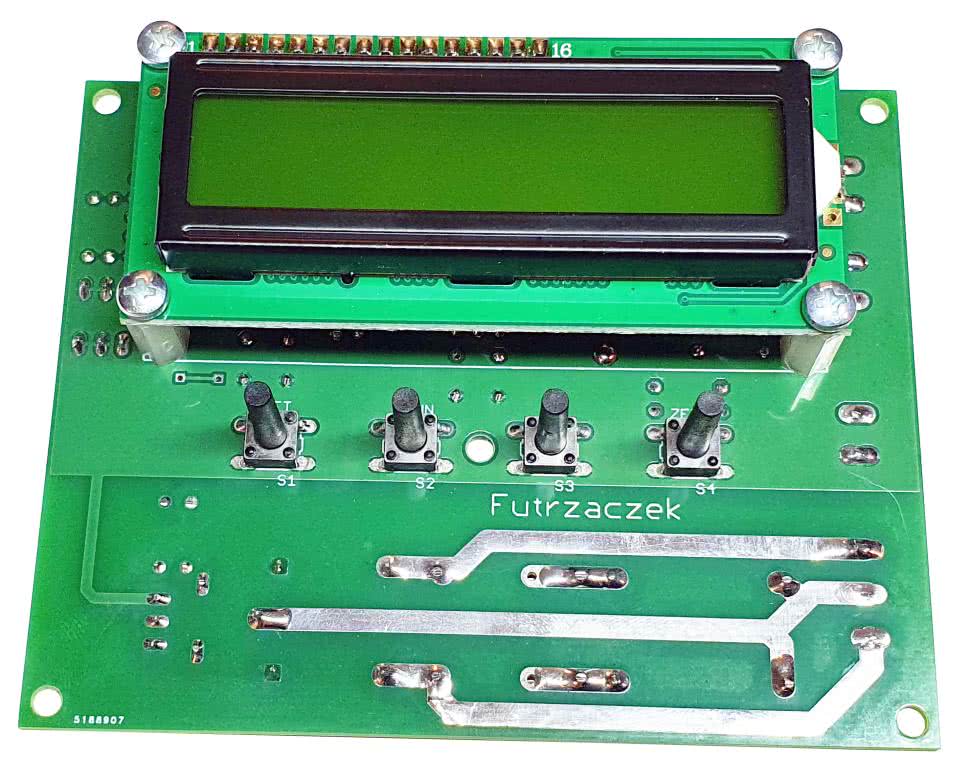
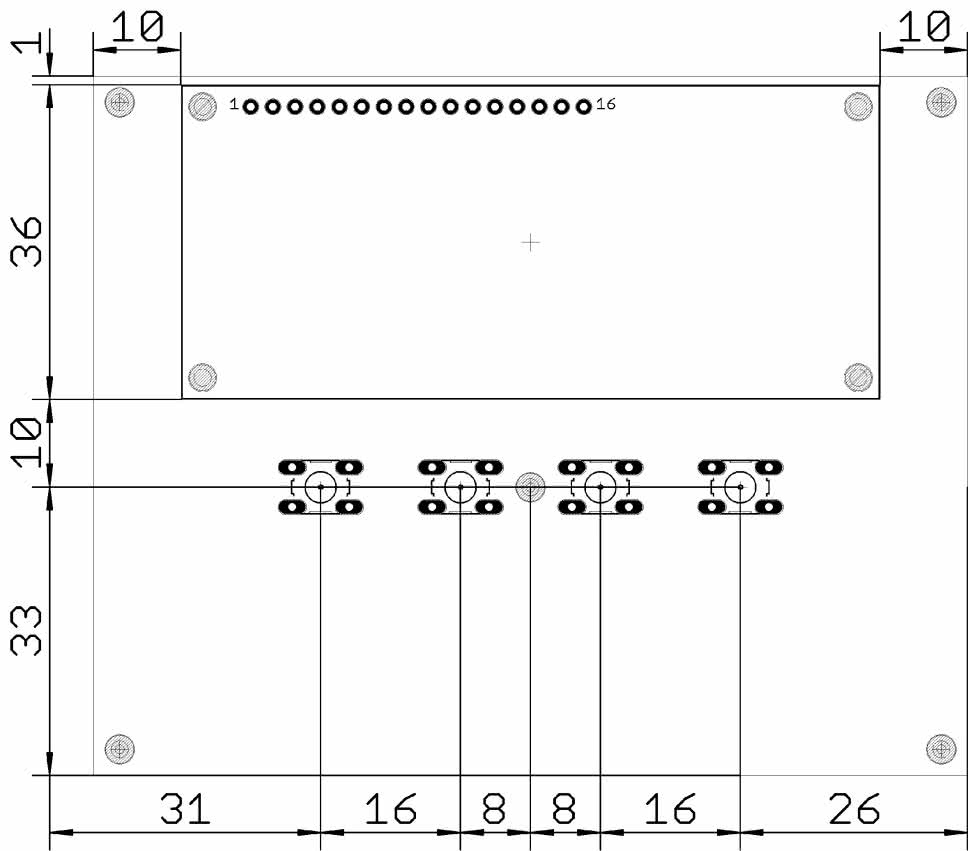
Na samym końcu, po wlutowaniu wszystkich przycisków, należy przykręcić wyświetlacz LCD za pomocą czterech tulei dystansowych oraz przylutować jego złącza. Warto lutowanie zostawić na sam koniec, po dokładnym przykręceniu, aby ewentualny naddatek wysokości tulei mógł być skompensowany przez lekkie wystawienie złączy z powierzchni płytki – tak aby część męska i żeńska wchodziły w siebie całkowicie. Rozmieszczenie przycisków i wyświetlacza oraz lokalizacja dodatkowego otworu montażowego na powierzchni płytki znajduje się na rysunku 3, dzięki niemu łatwiej będzie wykonać obudowę dla tego urządzenia.
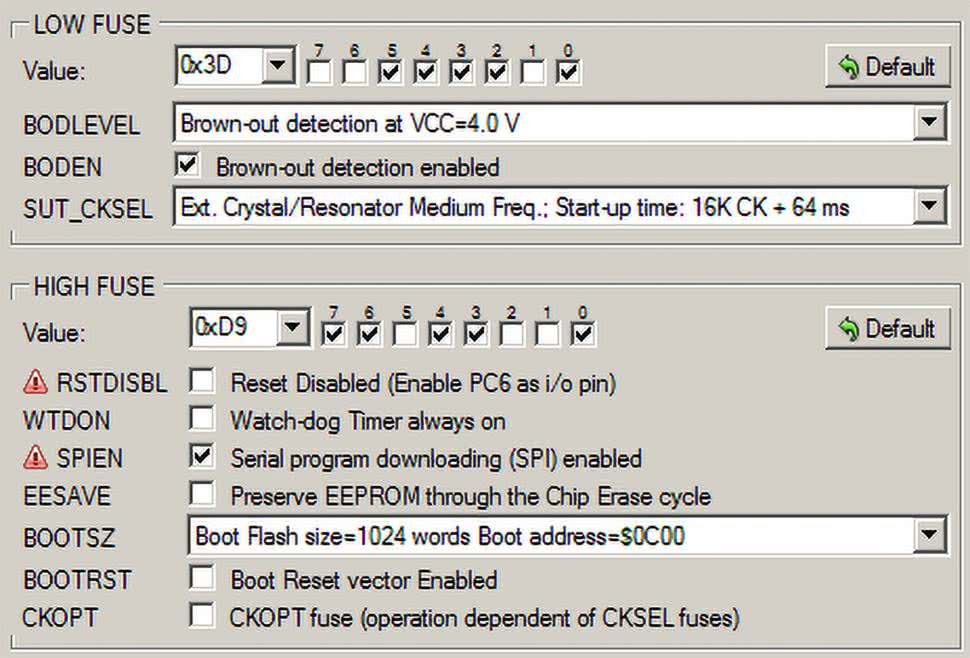
Na etapie uruchamiania jest konieczne zaprogramowanie pamięci Flash mikrokontrolera dostarczonym wsadem oraz ustawienie jego bitów zabezpieczających. Oto ich nowe wartości:
Low Fuse = 0x3D
High Fuse = 0xD9
Szczegóły są widoczne na rysunku 4, który zawiera widok okna konfiguracji tychże bitów z poziomu programu BitBurner. W ten sposób zostanie uruchomiony wbudowany generator obsługujący rezonator kwarcowy o średniej częstotliwości drgań oraz Brown-Out Detector, który wprowadzi mikrokontroler w stan zerowania, jeżeli jego napięcie zasilające spadnie poniżej 4 V. Taka konfiguracja znacznie zmniejsza ryzyko zawieszenia się układu podczas uruchamiania – zwłaszcza wtedy, gdy napięcie zasilające narasta powoli.
Poprawnie zaprogramowany układ jest gotowy do działania po ustawieniu kontrastu wyświetlacza potencjometrem P2. Do zasilania należy zastosować źródło napięcia stałego o wartości około 12 V (dopuszczalny przedział 10…16 V uwzględnia zakres prawidłowej pracy przekaźnika, z uwzględnieniem spadku napięcia na przewodzącej diodzie D2 i nasyconym tranzystorze T1 w temperaturze 20°C). Warto, aby owe napięcie było dobrze filtrowane, a jeszcze lepiej stabilizowane. Pobór prądu ze źródła napięcia 12 V wynosi około 10 mA przy wyłączonym przekaźniku oraz około 40 mA, kiedy cewka zostanie załączona. Trzeba zadbać o to, aby napięcie szybko zanikało w momencie wyłączenia zasilania, tak by układ wykrył jego zanik i zdążył z zapisem odmierzonego czasu do EEPROM.
Układ można łatwo przystosować do zasilania napięciem 24 V. Aby tego dokonać, w układzie wystarczy dokonać kilku niewielkich modyfikacji. Po pierwsze, przekaźnik PK1 powinien mieć cewkę przystosowaną do napięcia 24 V. Najlepiej pasujący podzespół ma oznaczenie JQC3FF/241ZS z oferty sklepu AVT. Po drugie, rezystor R10, który ogranicza prąd pobierany przez diody LED wyświetlacza LCD, powinien mieć rezystancję 2,7 kΩ, aby zachować podobną jasność podświetlenia. Po trzecie, jeżeli obudowa urządzenia miałaby słabą wentylację, polecam do stabilizatora US2 przykręcić radiator, który rozproszy wydzielane w układzie ciepło. Wystarczy niewielki radiator kompatybilny z obudową typu TO220, na przykład D02A z asortymentu wspomnianego już sklepu AVT.
Z uwagi na szerokość ścieżek łączących wyprowadzenia przekaźnika ze złączem J3, proponuję przyjąć maksymalne natężenie prądu płynącego przez to złącze na poziomie 8 A. Ścieżki te zostały odsłonięte spod maski lutowniczej, co ułatwia ich pogrubienie, na przykład spoiwem lutowniczym.
Eksploatacja
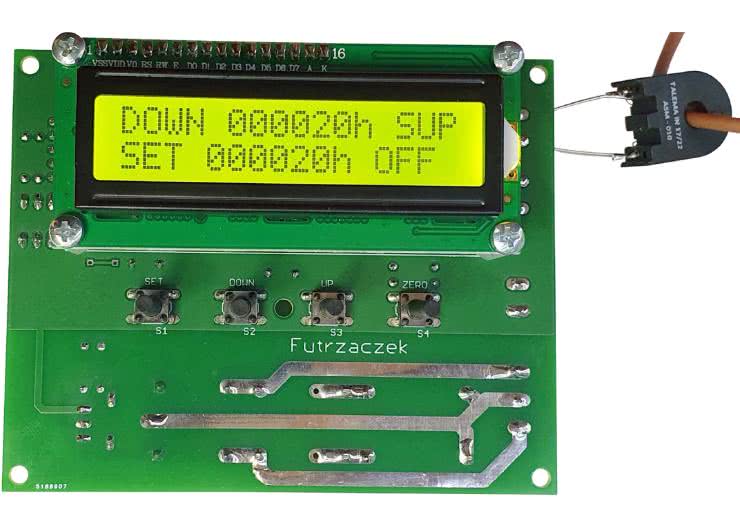
Widok ekranu działającego urządzenia jest zamieszczamy na fotografii tytułowej. Jego dokładna zawartość zależy od konfiguracji zworek JP1 i JP2:
- zwarte 1–2 w JP1: pomiar czasu aktywowany prądem płynącym przez przewód w przekładniku,
- zwarte 2–3 w JP1: pomiar czasu odbywa się zawsze po załączeniu zasilania układu,
- zwarte 1–2 w JP2: liczenie czasu w górę, od zera aż do 999999 h, bez aktywacji przekaźnika;
- zwarte 2–3 w JP2: liczenie czasu w dół, od wcześniej ustalonej wartości do zera, z załączeniem przekaźnika po dojściu do zera.
W górnym wierszu mamy dwie informacje: o już odmierzonym od zera czasie (UP, przy zliczaniu w górę) lub pozostałym czasie do końca (DOWN, przy odmierzaniu w dół). Po prawej stronie ekranu znajduje się informacja o aktywowaniu odliczania: stale załączony napis SUP (przy aktywacji po zasileniu) lub napis CUR załączający się, kiedy pobierany przez urządzenie prąd przekracza zadaną potencjometrem P1 wartość. Przy korzystaniu z aktywacji napięciem przekładnika prądowego można nie podłączać.
Drugi wiersz (SET) zawiera informację liczbową o ustalonym do odmierzenia czasie lub kreski w przypadku odmierzania w górę, bez limitu. Wartość tego progu można zmieniać, trzymając wciśnięty przycisk SET (S1) oraz S2 (DOWN) lub S3 (UP). Dłuższe trzymanie przyspiesza przewijanie wartości. Po około 10 s od ostatniej modyfikacji układ zapisze tę liczbę do nieulotnej pamięci EEPROM. Po prawej stronie dolnego wiersza znajduje się informacja o stanie styków przekaźnika: OFF – styki rozłączone, limit jeszcze nie został osiągnięty lub ON – styki załączone, limit czasu wyczerpany. Informacji tej nie ma przy zliczaniu w górę, przekaźnik jest bowiem wtedy nieużywany.
Układ odmierza czas w odcinkach po 200 ms i z taką rozdzielczością dokonuje zapisu do pamięci. Jedynie wyświetlanie zostało ograniczone do pełnych godzin. Dlatego krótsze okresy pracy maszyny, rzędu np. kilkudziesięciu minut, również zostaną dodane do ogólnej puli czasu pracy, choć mogą nie powodować inkrementacji wskazania na wyświetlaczu.
Michał Kurzela, EP
- R1, R5: 100 Ω
- R2, R3: 1 kΩ
- R4, R6…R9, R14…R18: 10 kΩ
- R10: 1,5 kΩ (opis w tekście)
- R11, R12: 33 Ω 3 W
- R13: 3,3 kΩ
- RN1: 4×10 kΩ SIL5
- P1, P2: 10 kΩ montażowy leżący jednoobrotowy
- C1: 10 nF raster 5 mm MKT
- C2, C5, C6, C8, C12, C13: 100 nF raster 5 mm MKT
- C3: 47 μF 35 V raster 2,5 mm
- C4: 1000 μF 35 V raster 5 mm
- C7, C11: 100 μF 16 V raster 2,5 mm
- C9, C10: 100 nF MKP X2 305 V AC raster 15 mm
- C14, C15: 15 pF monolityczny raster 5 mm
- D1, D4: 1N4148
- D2, D3: 1N5819
- LCD1: 2×16, zgodny z HD44780 np. LCD2×16 15
- T1: BC546
- US1: LM358 (DIP8)
- US2: 7805 (TO220)
- US3: ATmega8A-PU (DIP28)
- J1, J2, J5: ARK2/500
- J3: ARK3/500
- J4: goldpin 5 pin męski 2,54 mm THT
- JP1, JP2: goldpin 3 pin męski 2,54 mm THT + zworka
- PK1: JQC3FF/121ZS (opis w tekście)
- Q1: 4 MHz niski
- S1…S4: microswich 6×6 mm, H=13,5 mm
- Jedna podstawka DIP28 wąska
- Jedna podstawka DIP8
- Złącze męskie i żeńskie goldpin 1×16 pin 2,54 mm
- Cztery tuleje dystansowe, gwint wewnętrzny M3 12 mm poliamid
- Osiem śrub M3 6 mm
- Przekładnik prądowy TALEMA ASM-010












