 Zaloguj
Zaloguj



Jak działa port szeregowy?
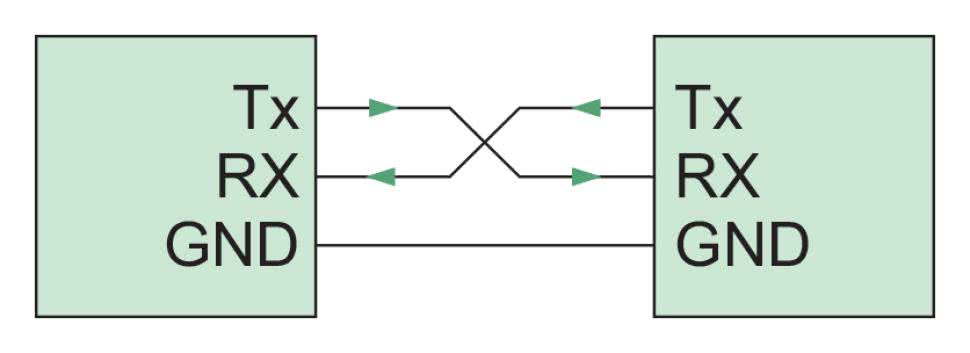
Port szeregowy UART (Universal Asynchronous Receiver/Transmitter – uniwersalny asynchroniczny odbiornik/nadajnik) składa się z dwóch linii danych: nadawczej Tx i odbiorczej Rx oraz masy. Obie linie działają niezależnie, więc możliwa jest równoczesna transmisja w obu kierunkach (full-duplex). Jak pokazuje rysunek 1 łączone są one „na krzyż”: wyjście Tx jednego urządzenia łączymy z wejściem Rx drugiego.
Najprostszą ramkę danych przesyłaną przez port szeregowy pokazuje rysunek 2. Istnieją także inne warianty różniące się liczbą bitów danych, długością startu, czy obecnością bitu parzystości. Nie będziemy się jednak nimi zajmowali.

W implementowanej przez nas wersji pojedyncza ramka składa się z dziesięciu bitów. W momencie, gdy linia jest wolna panuje na niej stan wysoki. Przesyłanie danych rozpoczyna się od bitu startu. Sygnalizuje on początek transmisji przez zmianę stanu linii na niski. Po nim następuje osiem bitów (jeden bajt) danych zaczynając od najmniej znaczącego bitu. Na końcu znajduje się bit stopu o wartości 1. Dzięki temu linia „płynnie” przechodzi w stan bezczynności. Poprzez zwiększenie liczby bitów stopu, zwiększamy minimalny czas pomiędzy dwoma kolejnymi ramkami.
Już w samym rozwinięciu skrótu UART znajdziemy słowo „asynchroniczny”. Nadajnik może rozpocząć przesyłanie nowej ramki w dowolnym momencie. Odbiornik cały czas „nasłuchuje” linie i rozpoczyna zapis ramki po wykryciu bitu startu. Między obydwoma urządzeniami nie ma żadnej innej synchronizacji. Czas trwania pojedynczego stanu jest ustalony parametrem, który musi być znany po obu stronach. Dlatego jednym z głównych czynników ograniczającymi długość pojedynczej ramki danych jest właśnie niedokładność zegarów. Musi być na tyle mała, aby w czasie trwania ramki błąd nie spowodował zgubienia lub dwukrotnego odczytanie któregoś stanu.
Prędkość przesyłania podawana jest w Bodach, czyli stanach na sekundę. Dane można przesyłać zasadniczo z dowolną prędkością, ale często spotykanymi wartościami są 9600 Bd oraz 115200 Bd. Dla nich jeden stan trwa odpowiednio 104 ms i 8,68 ms. W naszym przypadku jeden stan koduje jeden bit. Jednak ze względu na bit startu i stopu prędkość przesyłu danych to jedynie 80% tej wyrażonej w Bodach. Dlatego dla podanych przykładowych prędkości maksymalne przepustowości wynoszą odpowiednio 7,5 kib/s oraz 90 kib/s (gdzie kib jest skrótem od kibibit, czyli 1024 bity).
„Nadajnik”
Nasze eksperymenty zaczniemy od łatwiejszego zadania, czyli wysyłania. Przy odbieraniu musimy wykryć początek ramki i dostosować się do niego. Natomiast w części „Tx-owej” po prostu mierzymy czas i ustawiamy odpowiednia stany na linii danych.
Zanim jednak zaczniemy projektować musimy ustalić, w jaki sposób będzie się on komunikował z innymi modułami, które znajdą się w układzie FPGA. Z jednej strony dane do wysłania nie będą dostępne ciągle, więc nadajnik musi wiedzieć kiedy powinien zacząć wysyłać. Z drugiej strony nadawanie zajmuje dość długi czas. Nadanie pojedynczego bajtu przy prędkości 115200 Bd zajmie 86,8 ms co zajmie prawie 700 cykli zamontowanego na płytce zegara. Dlatego musimy także sygnalizować pozostałym modułom, czy nadajnik jest gotowy do przyjęcia kolejnej porcji danych. Musimy więc utworzyć magistralę komunikacyjną, która dzięki dodatkowym sygnałom będzie mogła obsłużyć opisane wyżej przypadki.
Istnieją różne gotowe magistrale danych, takie jak AXI [1], Avalon [2], czy Wishbone [3]. Tutaj wykorzystamy bardzo uproszczoną wersję szyny AXI-Stream. Skupimy się jednak na samej idei, która za nią stoi bez wgłębiania się w wymagania standardu. Szczegółowe informacje można znaleźć tu [4].
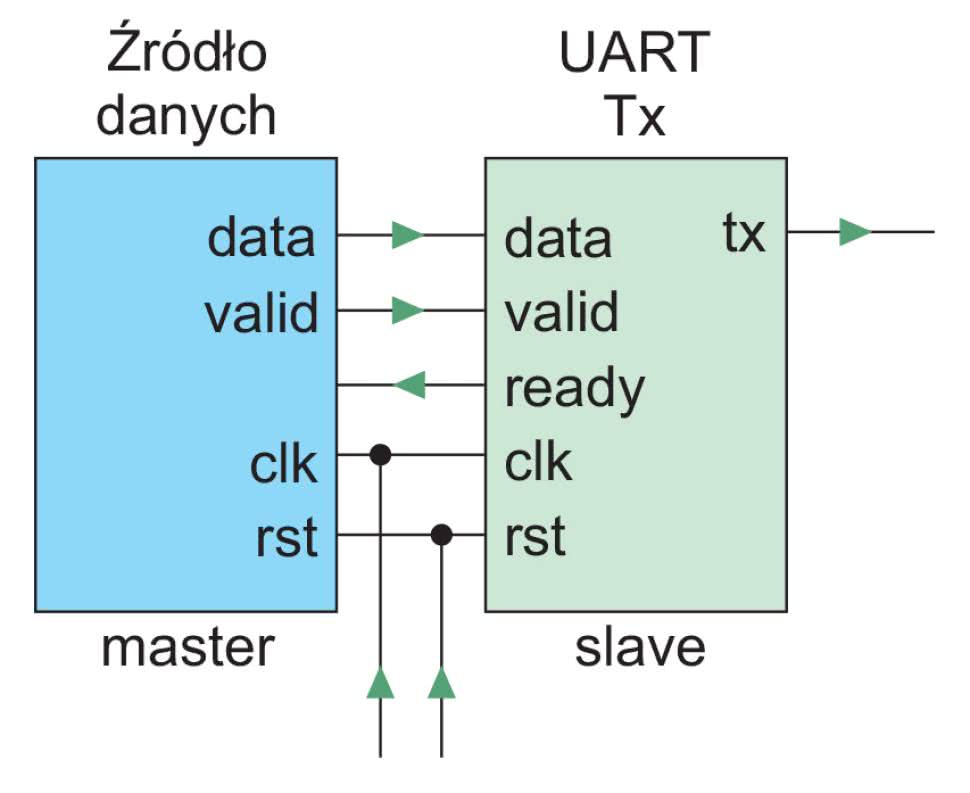
Rysunek 3 pokazuje połączenie nadajnika ze źródłem danych. Pierwsza linia nazwana data (dane), służy po prostu do przekazania danych. W naszym przypadku będzie to 8 bitowy wektor, który pozwoli na przekazanie całej ramki w jednym takcie zegara. Druga linia valid (poprawny) informuje, że jeżeli w danym cyklu zegara panuje na niej stan wysoki, to wartości dostępne na linii data są poprawne i należy je obsłużyć. Sygnał ready (gotowy) płynie w przeciwnym kierunku niż dwa poprzednie. Za jego pomocą slave (układ podrzędny) informuje mastera (układ nadrzędny) o gotowości do przyjęcia kolejnej porcji danych.
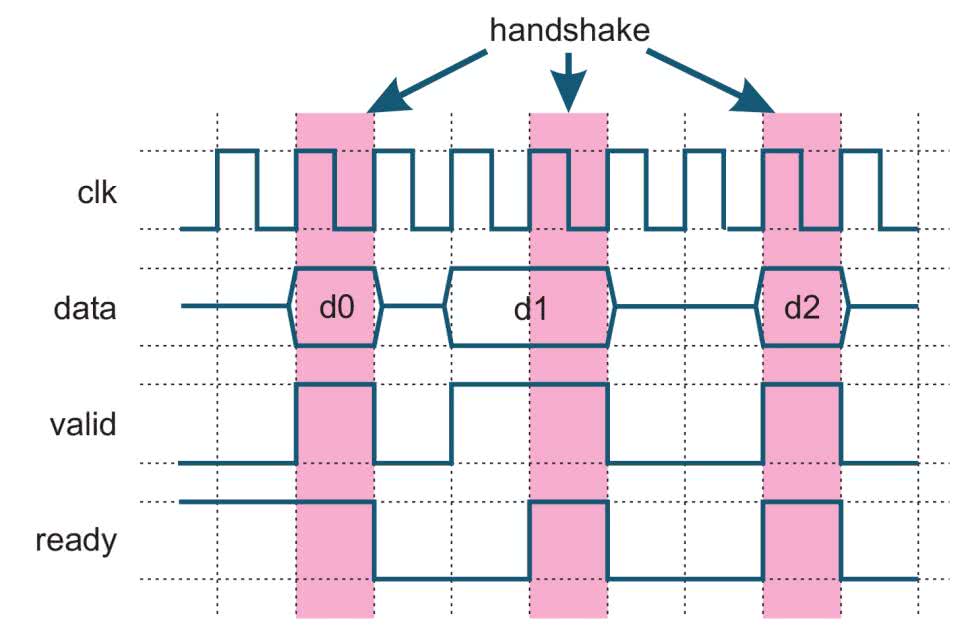
Przykładowe przebiegi uzyskane na magistrali pokazuje rysunek 4. Na początku widzimy, że sygnał ready jest w stanie wysokim. Układ podrzędny jest więc gotowy i czeka na nowe dane. Pojawiają się one na kolejnym takcie zegara, gdy sygnał valid przechodzi w stan wysoki. Stan gdy oba sygnały: valid i ready są równocześnie w stanie wysokim nazywa się handshake (uścisk dłoni). W momencie tym następuje przekazanie danych z mastera do slavea. Ponieważ dane d0 zostały wysłane, a kolejne jeszcze się nie pojawiły sygnał valid zostaje zdjęty. Podobnie zachowuje się nasz nadajnik: otrzymał dane i rozpoczął ich przetwarzanie, dlatego sygnał ready przyjął stan niski.
Gdy kolejna porcja danych (oznaczona jako d1) jest gotowa znowu następuje ustawienie linii valid. Tym razem jednak slave nie jest jeszcze gotowy do obsłużenia kolejnej porcji. Master musi więc potrzymać d1 na szynie dopóki dane nie zostaną obsłużone. Gdy nastąpi kolejny handshake d1 zostaną przekazane do urządzenia podrzędnego.
Jak widzimy dla d2 może też zdarzyć się sytuacja, że oba sygnały: ready i valid „zapalą się” równocześnie. Wtedy taka porcja danych zostanie obsłużona natychmiast.
Gdy sygnał valid jest opuszczony, stan linii danych nie powinien mieć wpływu na działanie układu. Dlatego dla tych chwil stan linii data został symbolicznie oznaczony poziomą linią położoną na wysokości stanu niedozwolonego (w połowie drogi pomiędzy 0 a 1).
Zostały jeszcze dwa sygnały, których znaczenie powinno być łatwe do odgadnięcia. Są to clk, czyli zegar oraz rst, czyli reset. Są to wspólne linie, które dla obu modułów są traktowane jako wejścia.
Aby ułatwić modelowanie magistral w języku SystemVerilog wprowadzono interfejsy. Na listingu 1 przedstawiono opis naszej magistrali.
10 interface StreamBus #(
11 parameter N = 8
12 ) (
13 input wire clk,
14 input wire rst
15 );
16 logic [N-1:0] data;
17 logic valid;
18 logic ready;
19
20 modport Master (
21 input clk,
22 input rst,
23 input ready,
24 output data,
25 output valid
26 );
27
28 modport Slave (
29 input clk,
30 input rst,
31 input data,
32 input valid,
33 output ready
34 );
35
36 endinterface
Widzimy, że składniowo interfejsy są bardzo podobne do modułów. Definicja rozpoczyna się w linii 10 od słowa kluczowego interface, po którym podajemy wymyśloną przez nas nazwę: StreamBus.
Interfejsy, podobnie jak moduły mogą być parametryzowane. W naszym przypadku stworzymy jeden parametr N określający długość szyny danych i przypiszemy mu domyślną wartość 8. W liniach 13 i 14 zdefiniowane są wejścia. Są to te sygnały, które są wspólne dla wszystkich elementów magistrali. Jak pamiętamy z rysunku 3 w naszym przypadku jest to reset oraz zegar. W środku interfejsu zdefiniowane są jego wewnętrzne sygnały. U nas są to pozostałe trzy linie: data, valid i ready. W tym miejscu nie ustalamy ich kierunku ale na razie jedynie typ.
Ostatnią częścią są tak zwane modport. Dla naszego interfejsu są przygotowane dwa: Master (linie 20 do 26) oraz Slave (linie 28 do 34). Wewnątrz nich określamy kierunki poszczególnych linii. Później w definicji modułu, w którym chcemy użyć interfejsu określamy której wersji chcemy użyć. Decydujemy o tym umieszczając w liście sygnałów odpowiednio StreamBus.Master albo StreamBus.Slave.
Przykładowe wykorzystanie interfejsu pokazuje listing 2.
10 module uart_tx #(
11 parameter F = 8000000,
12 parameter BAUD = 115200
13 ) (
14 StreamBus.Slave bus,
15 output logic tx
16 );
Jest to nagłówek modułu uart_tx, czyli naszego nadajnika. Najpierw przyjmuje on dwa parametry. F odpowiada częstotliwości zegara wyrażonej w hercach, a BAUD liczbę symboli na sekundę. Następnie w liniach 14 i 15 znajdziemy listę sygnałów. Pierwszym z nich jest nasz interfejs pracujący w trybie Slave, a drugim linia nadawcza portu szeregowego oznaczona jako tx. Widzimy, że dzięki wykorzystaniu interfejsu liczba wejść/wyjść uległa dużemu skróceniu.
Maszyna stanów
Zastanówmy się teraz co tak naprawdę powinien robić nasz nadajnik. Przez większość czasu będzie utrzymywał na wyjściu Tx stan wysoki i czekał na pojawienie się na interfejsie danych do wysłania. Gdy takowe się pojawią powinien przejść do procedury wysyłania: najpierw bit startu, potem kolejne bity danych i na końcu bit stopu. Musi przy tym wziąć pod uwagę, że czas trwania symbolu nie jest równy jednemu taktowi zegara, lecz musi być zgodny z zadanym. Po wysłaniu całego symbolu powinien znowu ustawić na wyjściu stan wysoki i rozpocząć oczekiwanie na kolejną daną. Możemy więc przygotować listę stanów, w których może znaleźć się nasz moduł oraz podać przepis na wyznaczenie kolejnego stanu w zależności od aktualnego oraz wejść naszego modułu. W naszym przypadku będzie ich cztery:
- WAIT – oczekiwanie na dane,
- START – wysłanie bitu startu,
- DATA – przesyłanie kolejnych bitów danych
- STOP – wysyłanie bitu stopu.
Aby posługiwać się w kodzie nazwami zdefiniujemy typ wyliczeniowy state, pokazany na listingu 3.
38 package uartPkg;
39
40 typedef enum logic [1:0] {
41 WAIT,
42 START,
43 DATA,
44 STOP
45 } state;
46
47 endpackage : uartPkg
Jak widzimy w linii 4 będzie on przechowywany jako wektor typu logic. Ponieważ może przyjmować 4 różne wartości wystarczą nam więc 2 bity do jego przechowania. Aby używać naszego nowego typu danych w rożnych modułach umieścimy go w pakiecie nazwanym uartPkg. Dzięki temu w projektach do których dołączymy nasz pakiet będziemy mogli odnieść się do naszego typu poprzez odwołanie postaci: uartPkg::state.
Mamy już sposób na reprezentację poszczególnych stanów, teraz zaprojektujmy hardware, którym będzie sterował. Pokazany został na rysunku 5, dla lepszej czytelności pominięte zostały połączenia wejść clk (wszystkie są przyłączone do sygnału zegarowego). Na początku, gdy pojawią się nowe dane zostaną one zapisane w przerzutniku 1. Jak widzimy, jego sygnał CE jest w stanie wysokim, gdy nastąpi handshake. Dzięki temu dane nie ulegną zmianie w czasie wysyłania.
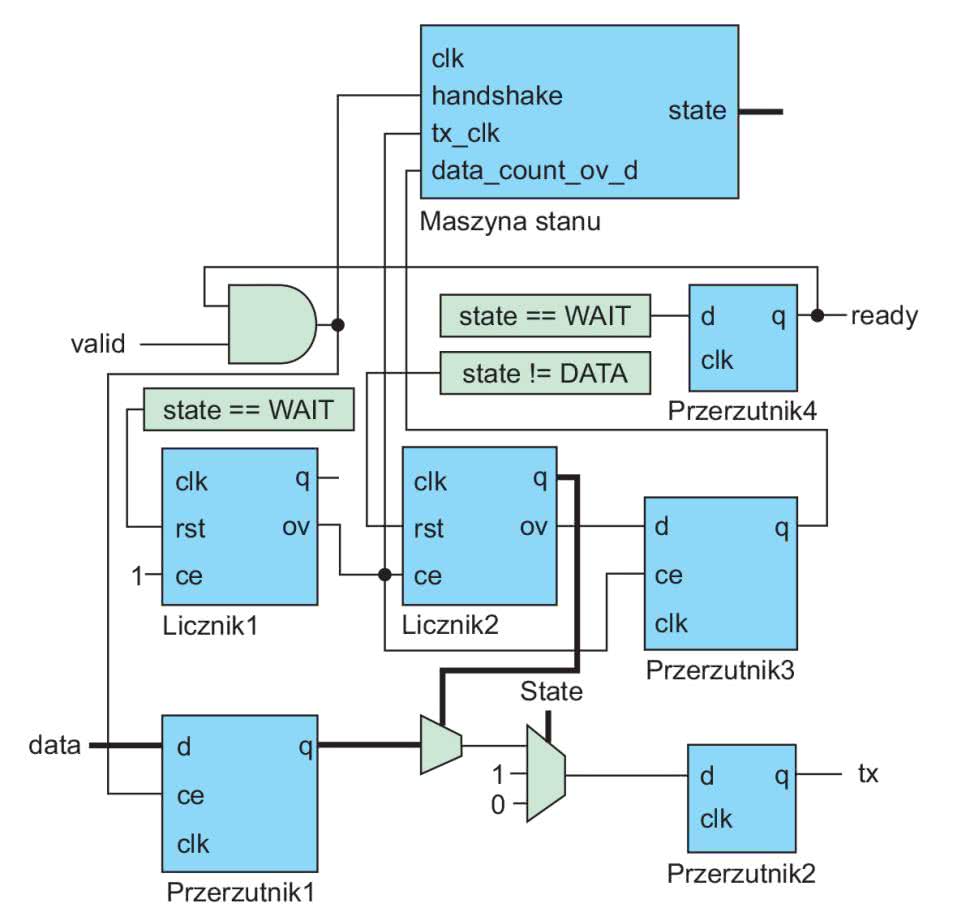
Stan linii wyjściowej jest ustalany za pomocą dwóch multiplekserów. Pierwszy z nich pozwala na wybranie jednego z 8 bitów danych. Jest on sterowany za pomocą licznika 2. Drugi z nich wybiera czy obecnie na wyjściu mają pojawić się dane, bit startu (0), czy stan wolnej linii (1). Tutaj decyzja jest podejmowana na podstawie aktualnego stanu. Sygnał Tx na wyjściu jest zatrzaskiwany w przerzutniku 2. Implementację „ścieżki danych” pokazuje listing 4.
41 always_ff @(posedge bus.clk)
42 if (handshake)
43 txb <= bus.data;
44
45 always_ff @(posedge bus.clk)
46 case (state)
47 uartPkg::START: tx <= 1’b0;
48 uartPkg::DATA: tx <= data_count_ov_d ? 1’b1 : txb[i];
49 default: tx <= 1’b1;
50 endcase
Ponieważ prędkość wysyłania jest mniejsza od częstotliwości taktowania potrzebujemy odpowiedniego sygnału zegarowego. Jest on generowany przez licznik 1, uruchamiany, gdy stan jest inny niż WAIT. Dzięki temu licznik czasu jest zsynchronizowany z początkiem transmisji. Jego przepełnienie jest wykorzystane przy wyznaczaniu następnego stanu oraz jako sygnał CE dla licznika 2. Wyznacza on, który bit ma być obecnie wysłany. Pracuje jedynie wtedy, gdy moduł znajduje się w stanie DATA. Przerzutnik 3 dostarcza informacji o zakończeniu wysyłania ostatniego bitu. Jest to sygnał przepełnienia licznika 2 opóźniony o czas trwania jednego symbolu. Implementacja tego fragmentu jest pokazana na listingu 5. Jak widzimy wykorzystane zostały stworzone wcześniej moduły licznika.
52 assign ctx_rst = (state == uartPkg::WAIT);
53 counter #(.N((F+BAUD/2)/BAUD)) ctx (
54 .clk(bus.clk),
55 .rst(!ctx_rst),
56 .ce(1’b1),
57 .q(),
58 .ov(tx_clk)
59 );
60
61 assign data_count_rst = (state != uartPkg::DATA);
62 counter #(.N(8)) data_count (
63 .clk(bus.clk),
64 .rst(!data_count_rst),
65 .ce(tx_clk),
66 .q(i),
67 .ov(data_count_ov)
68 );
69
70 always_ff @(posedge bus.clk)
71 if (tx_clk)
72 data_count_ov_d <= data_count_ov;
Zatrzymajmy się chwilę nad ustaleniem zakresu zliczania dla pierwszego licznika. Ma on postać:
(F+BAUD/2)/BAUD
gdzie F to częstotliwość zegara taktującego moduł, a BAUD to oczekiwana szybkość transmisji. Wyjaśnienia wymaga dodanie wartości BAUD/2 przed wykonaniem dzielenia. Gdyby wykonywać obliczenia na liczbach rzeczywistych jej obecność wydaje się wręcz błędem. Jednak tutaj obliczeń dokonujemy na liczbach całkowitych, a uzyskana część ułamkowa jest obcinana. Jest to tak zwane zaokrąglanie w dół. Dodając do dzielnej połowę dzielnika zmieniamy to zachowanie. Można to rozumieć jako dodane 0,5 przed wykonaniem zaokrąglenia w dół, co spowoduje że dla części ułamkowej mniejszej niż 0,5 nastąpi zaokrąglenie w dół, a dla większej niż 0,5 w górę. Aby uzyskać efekt zaokrąglenia w górę zamiast BAUD/2 musielibyśmy dodać BAUD-1.
Ostatnim nieomówionym elementem generowanie sygnału ready dla naszej magistrali. Jego implementacja jest prosta: nowe dane możemy przyjąć tylko gdy jesteśmy w stanie bezczynności WAIT. Jak pokazuje listing 6 implementacja tego warunku jest króciutka.
39 assign bus.ready = (state == uartPkg::WAIT);
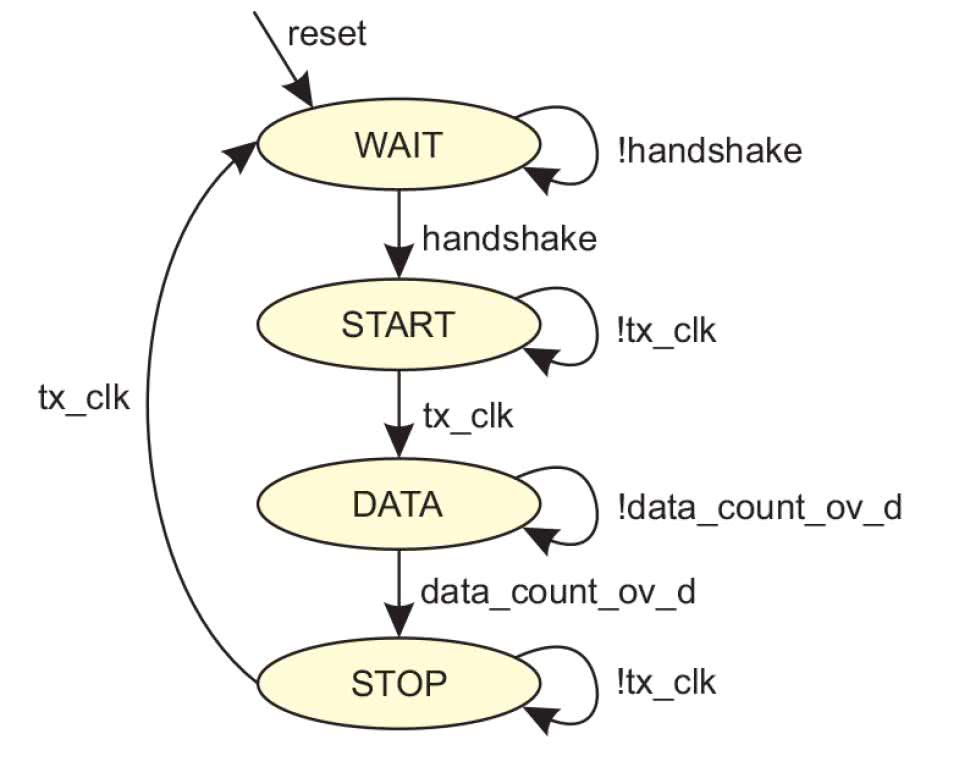
Wiemy już co ma się dziać w poszczególnych stanach. Teraz musimy ustalić w jaki sposób nasz moduł będzie przechodził pomiędzy nimi. Zostało to pokazane na rysunku 6. Na samym początku, zaraz po resecie, znajdziemy się w stanie WAIT. Decyzję o wyborze następnego stanu musimy podjąć na każdym narastającym zboczu zegara.
W stanie WAIT decyzję podejmujemy na podstawie wystąpienia handshakeu. Ponieważ ustawienie sygnału ready jest równoznaczne z przebywaniem w stanie WAIT wystarczy, że sprawdzimy sygnał valid. Jeśli pojawią się nowe dane do wysłania, przejdziemy do stanu START, a w przeciwnym razie pozostaniemy w WAIT. Następnie musimy nadać bit startu, dlatego w stanie START będziemy tak długo, aż minie czas nadawania jednego symbolu. Zostaniemy o tym poinformowani poprzez wystąpienie przepełnienia od licznika, które w naszej maszynie trafi na wejście tx_clk. W stanie DATA będziemy przez czas trwania kolejnych 8 stanów. O wysłaniu ostatniego bitu poinformuje naszą maszynę stan wysoki na wejściu data_count_ov. W stanie STOP znowu będziemy przebywać przez czas jednego symbolu, czyli do pojawienia się stanu wysokiego na sygnale tx_clk. Spowoduje on powrót do stanu WAIT i oczekiwanie na nowe dane.
Implementację maszyny stanów prezentuje listing 7. Zaczynamy od asynchronicznego resetu znajdującego się w liniach 28 i 29. Następnie funkcja przejścia została zrealizowana w bloku case, w którym po kolei dla każdego stanu następuje sprawdzenie warunków z rysunku 6. Dla skrócenia zapisu zamiast polecenia if wykorzystany został trójargumentowy operator ?:.
17 uartPkg::state state;
27 always_ff @(posedge bus.clk or negedge bus.rst)
28 if (!bus.rst)
29 state <= uartPkg::WAIT;
30 else
31 case (state)
32 uartPkg::WAIT: state <= bus.valid ? uartPkg::START :uartPkg::WAIT;
33 uartPkg::START: state <= tx_clk ? uartPkg::DATA : uartPkg::START;
34 uartPkg::DATA: state <= data_count_ov_d ? uartPkg::STOP : uartPkg::DATA;
35 uartPkg::STOP: state <= tx_clk ? uartPkg::WAIT : uartPkg::STOP;
36 default: state <= uartPkg::WAIT;
37 endcase
Mamy gotowy moduł. Potrzebujemy teraz test bench’u do sprawdzenia jego działania w symulacji. Fragment kodu został pokazany na listingu 8.
11 module uart_tx_tb;
12 logic clk;
13 logic rst;
14 StreamBus bus(clk, rst);
15
16 initial begin
17 clk <= ‘0;
18 forever #625 clk <= ~clk;
19 end
20
21 initial begin
22 rst <= 1’b0;
23 #1250 rst <= 1’b1;
24 end
25
26 initial begin
27 bus.valid <= 1’b0;
28 #1250;
29 bus.valid <= 1’b1;
30 bus.data <= 8’hab;
31 end
32
33 uart_tx dut(
34 .bus(bus),
35 .tx()
36 );
37 endmodule
W liniach 12 i 13 zdefiniowaliśmy dwa sygnały które posłużą do generowania sygnału zegarowego i resetu. Natomiast w linii 14 korzystającą z nich stworzyliśmy instancję naszego interfejsu StreamBus o nazwie bus. Dalej trzech kolejnych blokach initial generujemy sygnał zegarowy, reset oraz dane. Szczególnie ciekawy jest ten trzeci z nich ponieważ korzystając z kropki odwołujemy się do poszczególnych sygnałów wewnątrz interfejsu. Na końcu umieszczamy instancję modułu uart_tx i podłączamy do niej interfejs. Symulację uruchamiamy w programie ModelSim za pomocą polecenia:
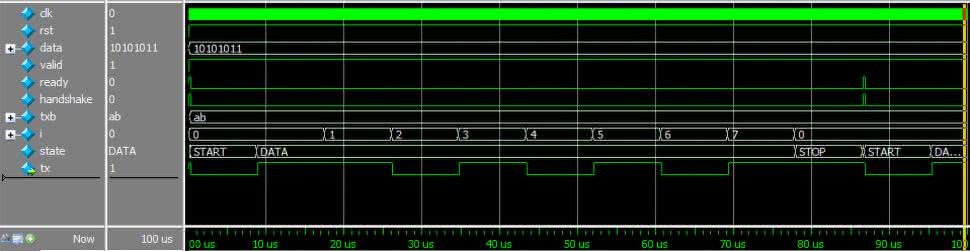
Tutaj widoczna jest kolejna zaleta wykorzystania typu wyliczeniowego. Zamiast wartości liczbowych wypisane zostały nazwy kolejnych stanów.
Źródło danych
Mamy już gotowy i sprawdzony nadajnik. Aby jednak wykorzystać go w sprzęcie potrzebujemy jeszcze źródła danych. Stworzymy więc bardzo prosty projekt, którego zadaniem będzie wysłanie na port szeregowy kolejnych liczb od 0 do 9 zakodowanych w formacie ASCII. Jego schemat pokazuje rysunek 8.

Przy okazji jego budowy zapoznamy się z działaniem naszej magistrali w praktyce.
11 module uart_tx_tb;
12 logic clk;
13 logic rst;
14 StreamBus bus(clk, rst);
15
16 initial begin
17 clk <= ‘0;
18 forever #625 clk <= ~clk;
19 end
20
21 initial begin
22 rst <= 1’b0;
23 #1250 rst <= 1’b1;
24 end
25
26 initial begin
27 bus.valid <= 1’b0;
28 #1250;
29 bus.valid <= 1’b1;
30 bus.data <= 8’hab;
31 end
32
33 uart_tx dut(
34 .bus(bus),
35 .tx()
36 );
37 endmodule
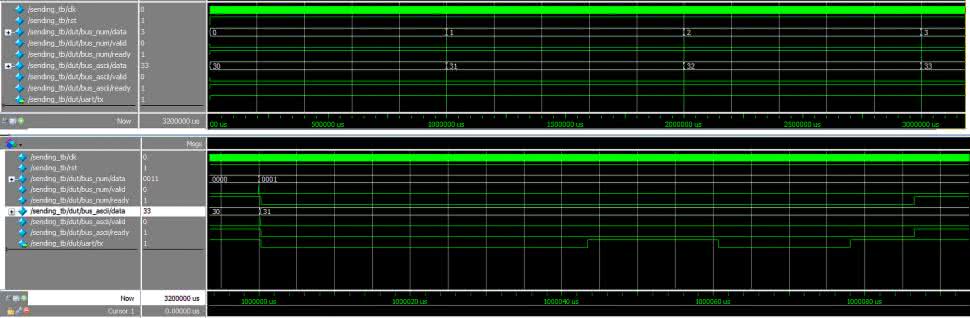
Zaczynając od lewej strony pierwszym modułem jest źródło danych. Składa się ono z dwóch liczników. Pierwszy z nich zapewnia opóźnienie pomiędzy kolejnymi danymi, a drugi generuje kolejne liczby do wysłania. Sygnał valid jest wyzwalany w momencie przepełnienia pierwszego licznika. Ciekawa jest obsługa sygnału ready – steruje on sygnałami CE. Jeżeli druga strona magistrali nie jest gotowa następuje zablokowanie pracy źródła. Jego implementacja jest pokazana na listingu 9.
10 module data_source #(
11 parameter F = 8000000
12 ) (
13 StreamBus.Master bus
14 );
15 logic c_1s_ov;
16
17 counter #(.N(F)) c_1s (
18 .clk(bus.clk),
19 .rst(bus.rst),
20 .ce(bus.ready),
21 .q(),
22 .ov(c_1s_ov)
23 );
24
25 counter #(.N(10)) c_data (
26 .clk(bus.clk),
27 .rst(bus.rst),
28 .ce(c_1s_ov & bus.ready),
29 .q(bus.data),
30 .ov()
31 );
32
33 assign bus.valid = c_1s_ov;
34
35 endmodule
Posiada tylko jedno wejście – naszą magistralę (linia 13). Następnie znajdują się dwie instancje licznika. Pierwszy z nich (linie 17...23) generuje sygnał przepełnienia co około sekundę.
Drugi natomiast realizuje zliczanie od 0 do 9 (linie od 25 do 31).
Kolejnym elementem jest konwersja na ASCII. Jest to bardzo prosty moduł. Na danych przepływających przez magistralę realizuje on dodanie 48 czyli wartości ‘0’ w ASCII. Tak naprawdę jest to po prostu doklejenie do wejściowych bitów wartości 4’b0011. Wyjściowy wynik jest następnie zapisany w rejestrze. Warto zwrócić uwagę, że sygnał valid, musi „płynąć” razem z danymi, których dotyczy. Brak sygnału ready, podobnie jak poprzednio, powoduję zatrzymanie pracy modułu. Natomiast wyjście ready jest po prostu zwarte z jego wejściem. Jest to wada tego typu magistrali, ponieważ powstaje sygnał, który steruje stosunkowo dużą ilość logiki i nie może zostać „zpipelinowany” poprzez dodanie dodatkowych rejestrów. Może on powodować problemy z domknięciem relacji czasowych podczas budowania projektu. Więcej na ten temat można znaleźć między innymi w [5].
10 module to_ascii (
11 StreamBus.Slave bus_in,
12 StreamBus.Master bus_out
13 );
14
15 always_ff @(posedge bus_in.clk)
16 if (bus_out.ready)
17 bus_out.data <= 8’d48 + bus_in.data;
18
19 always_ff @(posedge bus_in.clk or negedge bus_in.rst)
20 if (!bus_in.rst)
21 bus_out.valid = 1’b0;
22 else if (bus_out.ready)
23 bus_out.valid <= bus_in.valid;
24
25 assign bus_in.ready = bus_out.ready;
26 endmodule
Jego implementacja jest pokazana na listingu 10. Jako wejścia podane są dwie magistralę. Wejściowa pracuje w trybie Slave, a wyjściowa Master. Wewnątrz modułu znajdziemy dwa bloki always_ff. Pierwszy z nich (linie 15...17) realizuje operację na danych, a drugi (linie 19...23) opóźnia sygnał valid. Widzimy, że resetowany jest jedynie ten drugi. Jeżeli sygnał valid jest w stanie niskim dane znajdujące się na magistrali i tak nie zostaną zinterpretowane. Nie ma więc potrzeby ich resetować.
Wszystkie trzy przedstawione bloki zostały połączone w module sending. Jest to główny moduł naszego projektu, który uruchomimy w układzie FPGA. Jego kod pokazuje listing 11.
10 module sending #(
11 parameter F = 8000000
12 ) (
13 input wire clk,
14 input wire rst,
15 output logic tx
16 );
17 StreamBus #(.N(4)) bus_num (.clk(clk), .rst(rst));
18 StreamBus #(.N(8)) bus_ascii (.clk(clk), .rst(rst));
19
20 data_source #(.F(F)) source (
21 .bus(bus_num)
22 );
23
24 to_ascii ascii (
25 .bus_in(bus_num),
26 .bus_out(bus_ascii)
27 );
28
29 uart_tx #(
30 .F(F),
31 .BAUD(115200)
32 ) uart (
33 .bus(bus_ascii),
34 .tx(tx)
35 );
34
35 endmodule
Ma on dwa wejścia: zegar i reset oraz jedno wyjście tx. W liniach 17 i 18 zdefiniowane są dwa interfejsy, którymi połączymy modułu. Następnie znajdują się kolejne instancję omówionych wcześniej modułów. Prędkość transmisji została ustalona na 115200 Bodów.
Przed rozpoczęciem budowania warto jeszcze uruchomić symulację, którą znajdziemy w pliku 05_UART/sending_tb.sv. Możemy w tym celu wykorzystać skrypt:
Czas na sprzęt
Ostatnim krokiem jest zbudowanie projektu i uruchomienie go w układzie FPGA. Uruchamiamy środowisko Quartus i otwieramy projekt 05_uart_tx/05_uart.qpf. Podobnie jak poprzednio rozpoczynamy budowę. Po jej zakończeniu wrócimy jeszcze na chwilę do naszej maszyny stanów. Okazuje się, że środowisko potrafi wykryć jej obecność w kodzie i wykonać dodatkowe optymalizacje.
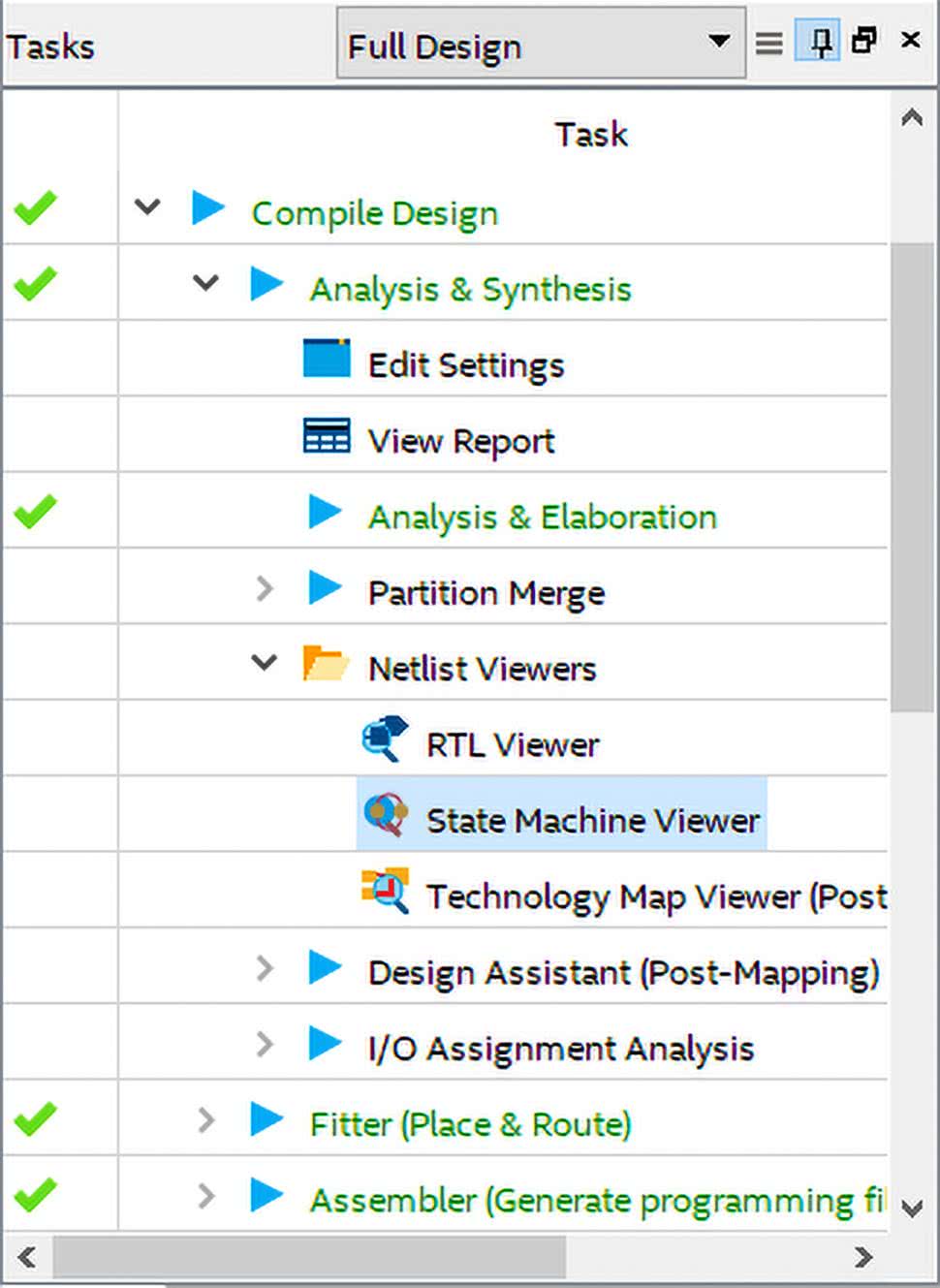
Aby się o tym przekonać z panelu Tasks wybieramy opcję Analysis & Synthesis, następnie Netlist Viewers, gdzie znajdziemy State Machine Viewer (rysunek 10).
Pojawi się okno podobne to tego z rysunku 11. W środkowej części okna widzimy graf przejść naszej maszyny. Nazwy stanów zostały wyciągnięte z użytego trybu wyliczeniowego.
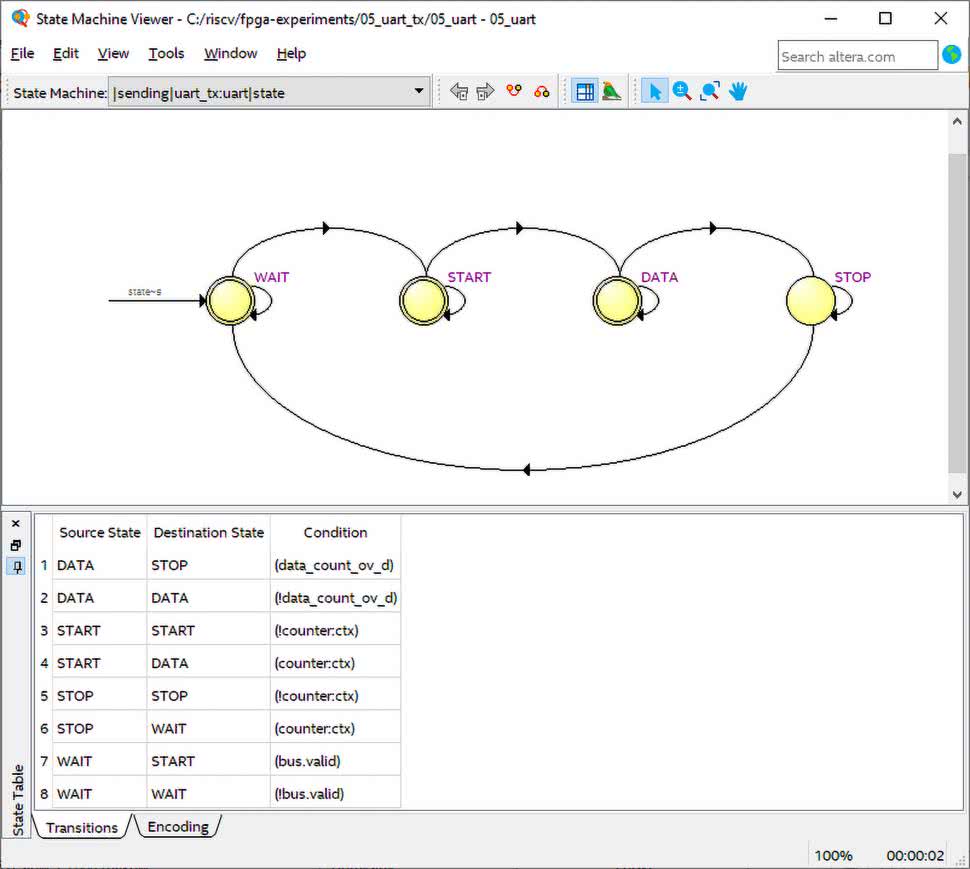
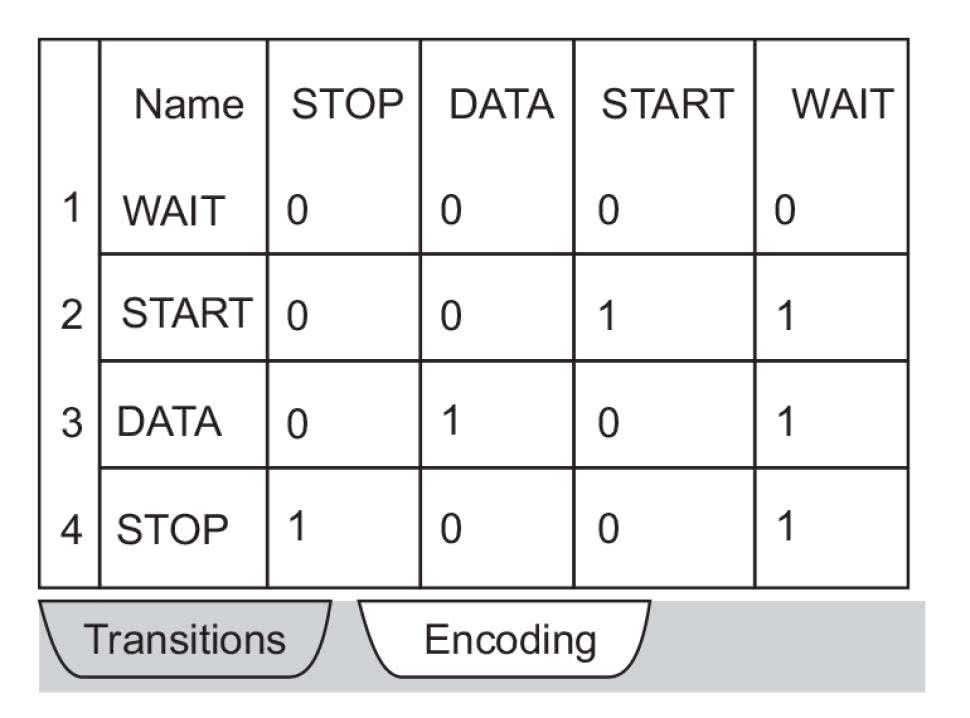
W dolnej części okna w zakładce Transitions widzimy listę możliwych przejść z podanymi warunkami. W zakładce Encodeing (rysunek 12) widzimy w jaki sposób stan będzie reprezentowany logice. Widzimy, że zamiast 2 bitów są wykorzystane 4.
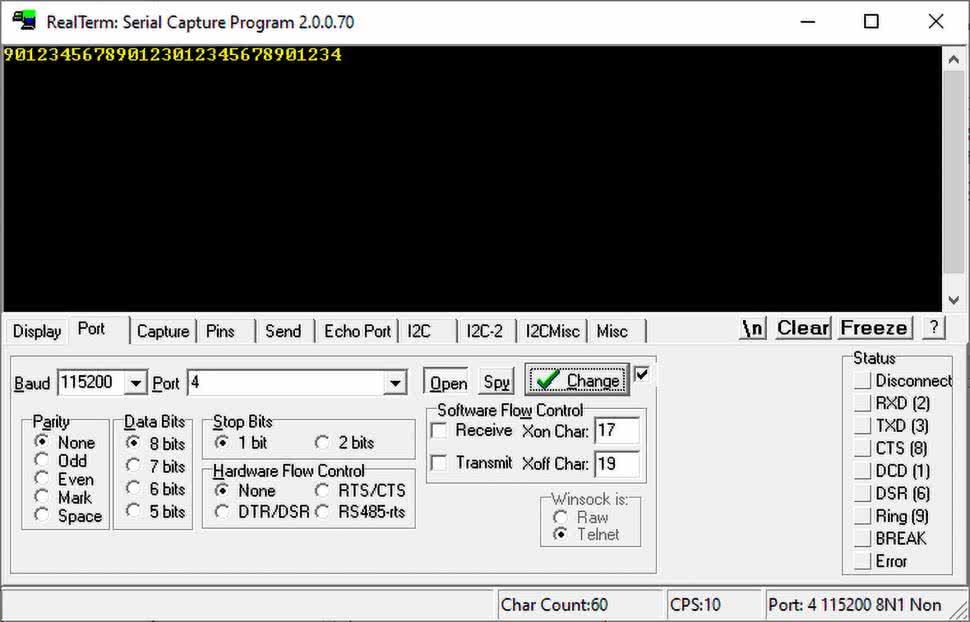
Wróćmy jednak do sprzętu. Gdy wsad dla układu FPGA zostanie wygenerowany możemy podłączyć „Rysino” do komputera i rozpocząć programowanie. Gdy zakończy się ono powodzeniem otwieramy dowolny monitor portu szeregowego. Ja wykorzystałem program Realterm [6]. W zakładce Port wybieramy numer portu szeregowego oraz ustawiamy prędkość transmisji na 115200. Po zatwierdzeniu przyciskiem Change w polu danych powinny pojawiać się kolejne cyfry co zostało pokazane na rysunku 13.
Podsumowanie
W tym odcinku uruchomiliśmy nadajnik portu szeregowego, a przy okazji przyglądnęliśmy się koncepcji maszyny stanów oraz magistrali. W następnej części zajmiemy się drugą stroną portu szeregowego, czyli odbieraniem danych.
Rafał Kozik
rafkozik@gmail.com
- AMBA® AXI™ and ACE™ Protocol Specification, ARM 2019, http://bit.ly/38NHTVk
- Avalon® Interface Specifications, Intel 2019, https://intel.ly/2Qaz1CI
- WISHBONE System-on-Chip (SoC)Interconnection Architecturefor Portable IP Cores, Open Cores 2010, http://bit.ly/2wVy3n1
- AMBA® 4 AXI4-Stream Protocol, ARM 2010, http://bit.ly/2W6coTL
- Building a Skid Buffer for AXI processing, http://bit.ly/2TXWIQ0
- http://bit.ly/2TJx3LJ












