Zaloguj
Zaloguj




Zanim przejdziemy do opisu kolejnych źródeł czasu i częstotliwości (uszeregowanych na potrzeby niniejszego artykułu według rosnącej dokładności i stabilności), najpierw krótko podsumujemy podstawowe obszary zastosowań źródeł sygnału taktowania, spotykane w codziennej praktyce inżynierskiej.

- Komunikacja asynchroniczna – układy cyfrowe (przeważnie bazujące na mikrokontrolerach, ale także na układach programowalnych, jak FPGA), które komunikują się z innymi urządzeniami za pomocą szeregowych interfejsów o standardowej prędkości transmisji (np. 9600 bps, 19200 bps czy też 115200 bps w przypadku łączy UART, RS485, itp.), są zobligowane do zachowania niezbędnej dokładności częstotliwości taktowania. Przyczyna jest prozaiczna – odchyłki częstotliwości, zwłaszcza przy przesyłaniu długich pakietów danych, powodują powstanie błędów transmisji, z którymi odbiorniki współpracujących urządzeń mogą sobie nie poradzić. Z tego też względu w wielu współczesnych mikrokontrolerach dość powszechnie spotykane są sprzętowe bloki peryferyjne U(S)ART, zapewniające funkcjonalności ułatwiające zachowanie ciągłości przekazu danych. Przykładowo, odbiorniki USART procesorów STM32 oferują tolerancję odchyłek odbieranego sygnału na poziomie przekraczającym 4%, zaś niektóre podrodziny (np. STM32 L0) umożliwiają zaawansowaną, automatyczną detekcję prędkości transmisji (auto baud rate detection), która do działania wymaga jednak zachowania pewnych warunków wstępnych dot. pierwszego otrzymanego znaku. Specyfikacja interfejsu USB 2.0 wymaga natomiast zachowania dokładności częstotliwościowej na poziomie ±1,5% (dla trybu low-speed 1,5 Mbps) lub ±0,25% (dla trybu full-speed 12 Mbps).
- Taktowanie procesorów i systemów FPGA – stabilne źródła taktowania są niezbędne również do poprawnej pracy komputerów, urządzeń mobilnych oraz procesorów aplikacyjnych we wszelkiej maści systemach wbudowanych, a także macierzy FPGA. O ile mniejsze procesory i niemal wszystkie mikrokontrolery korzystają z pojedynczych źródeł taktowania, wspieranych przez rozbudowane, wewnętrzne bloki preskalerów i pętle synchronizacji fazowej (nie licząc osobnych obwodów taktowania dla zegarów RTC), o tyle systemy komputerowe wymagają dostarczenia szeregu zewnętrznych sygnałów, zapewniających częstotliwości wymagane do poprawnej pracy procesora (często w dość szerokim zakresie, przestrajanym w ramach dynamicznego skalowania wydajności i poboru mocy), jak i wszelkich układów peryferyjnych, pamięci, koprocesorów graficznych, itd.
- Zegary czasu rzeczywistego – odmierzanie czasu to aspekt, który zdecydowanie najczęściej kojarzony jest przez konstruktorów systemów wbudowanych z zagadnieniem precyzyjnych źródeł częstotliwości. Z tego też względu lwia część rynku mikrokontrolerów zostaje obecnie wyposażona we wbudowane oscylatory, współpracujące z zewnętrznymi rezonatorami kwarcowymi o częstotliwości równej 32,768 kHz. Podzielenie tej wartości przez prosty, 15-bitowy licznik pozwala uzyskać dokładny sygnał o okresie 1 sekundy. W sprzedaży dostępne są także zintegrowane, scalone zegary czasu rzeczywistego, które oprócz cyfrowych liczników i układów korekcji (niezbędnej przy odliczaniu dni, miesięcy i lat, w tym również przestępnych) są wyposażone także w precyzyjne oscylatory z kompensacją termiczną.
- Komunikacja radiowa – współczesna transmisja bezprzewodowa z oczywistych względów bazuje na stabilnych źródłach sygnału odniesienia, które z uwagi na powszechność zastosowań modulacji fazy muszą zapewniać nie tylko stałą częstotliwość, ale także doskonałe parametry fazowe czy też dodatkowe wejścia kontrolne, pozwalające na dynamiczne dostosowywanie do potrzeb urządzenia. Postęp w dziedzinie parametrów widmowych musi jednak iść w parze z miniaturyzacją oraz redukcją poboru mocy, co zyskuje szczególne znaczenie w dobie powszechnego rozwoju segmentu IoT oraz technologii mobilnych. Rynek telekomunikacyjny w naturalny sposób jest więc największym odbiorcą coraz nowocześniejszych źródeł częstotliwości wzorcowej.
- Systemy digital audio – standardowe rozwiązania układowe, stosowane powszechnie w systemach akwizycji oraz odtwarzania cyfrowych sygnałów audio, zakładają użycie określonych częstotliwości próbkowania – najczęściej spotykane wartości to 44,1 kHz (CD audio), 48 kHz, 96 kHz oraz 192 kHz. Im wyższa częstotliwość taktowania, tym wierniejsze odwzorowanie dźwięku, jednak ważny okazuje się tu również tzw. jitter (utożsamiany z pojęciem szumu fazowego). W przypadku połączenia kilku systemów o niezbyt dobrze zsynchronizowanym taktowaniu różnice czystości odtwarzania mogą być słyszalne dla najbardziej wprawnych odbiorców. I choć na obecność takich zniekształceń wpływają głównie różnice w taktowaniu poszczególnych bloków (a nie wartość częstotliwości jako takiej), to są osoby gotowe inwestować dziesiątki tysięcy złotych w... specjalnie zaprojektowane zegary atomowe, zapewniające ultraprecyzyjną częstotliwość taktowania i niski jitter dla całego cyfrowego zestawu audio (fotografia 1).
- Liczniki częstotliwości – częstotliwość jest jedną z fundamentalnych wielkości fizycznych o szczególnym znaczeniu dla elektroniki, stąd nie trzeba raczej nikogo przekonywać o istotności jej pomiaru w laboratoriach i pracowniach konstrukcyjnych czy serwisowych. Podczas gdy funkcję pomiaru częstotliwości zapewnia dziś znaczna część uniwersalnych mierników (multimetrów przenośnych) oraz oscyloskopów, specjalizowane mierniki szerokopasmowe o precyzyjnych źródłach odniesienia stabilizowanych aktywnie (OCXO – więcej informacji na ich temat podamy w dalszej części artykułu) należą do stałego arsenału zarówno pracowni profesjonalnych, jak i warsztatów radioamatorskich.
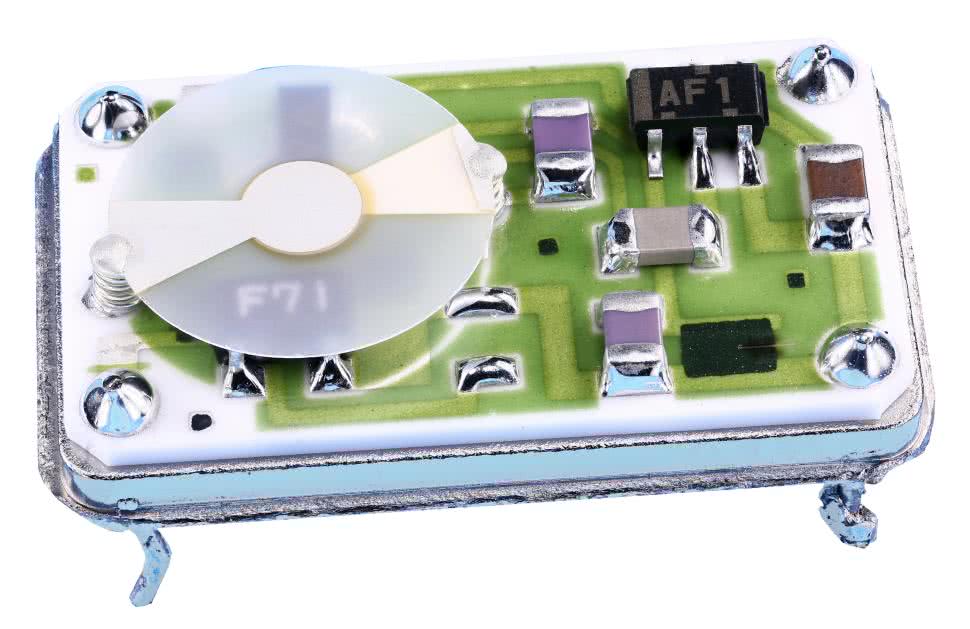
- Akwizycja sygnałów analogowych – stabilne źródła częstotliwości mogą także służyć do taktowania przetworników ADC/DAC, pracujących w szybkich systemach synchronicznej akwizycji sygnałów pomiarowych, również w zakresie spektrum poniżej pasma radiowego. Praktycznie wszystkie zaawansowane konwertery umożliwiają pracę z zewnętrznym źródłem sygnału taktującego, w tym przypadku jednak zastosowanie znajdują często źródła o relatywnie wąskim zakresie częstotliwości. Jednym z zastosowań precyzyjnych źródeł częstotliwości są także wzmacniacze fazoczułe (tzw. lock-in amplifiers, fotografia 2), używane do detekcji bardzo słabych sygnałów, występujących na tle silnego szumu i innych zakłóceń. Szczególnym przykładem niezwykle rozbudowanych aplikacji, które opierają się na precyzyjnym odmierzaniu czasu i częstotliwości, są systemy obrazowania medycznego, odpowiednio – PET oraz MRI.

Rezonatory kwarcowe
Przegląd precyzyjnych źródeł częstotliwości należy zacząć od tych najczęściej spotykanych, stosowanych do taktowania w niemal wszystkich branżach elektroniki. Oscylatory kwarcowe (bo o nich mowa) składają się z właściwego rezonatora kwarcowego oraz układu zapewniającego podtrzymanie drgań rezonansowych kryształu na drodze wprowadzenia silnego sprzężenia zwrotnego. Sam rezonator jest w istocie cienką płytką kwarcu, przygotowaną według precyzyjnie dobranych wymiarów i geometrii oraz, co bardzo ważne, przyciętą pod ściśle określonym kątem względem osi bloku kwarcowego. Sposób cięcia wpływa na parametry rezonatora i wraz z geometrią płytki pozwala kształtować charakterystykę komponentu w zaskakująco szerokim zakresie.

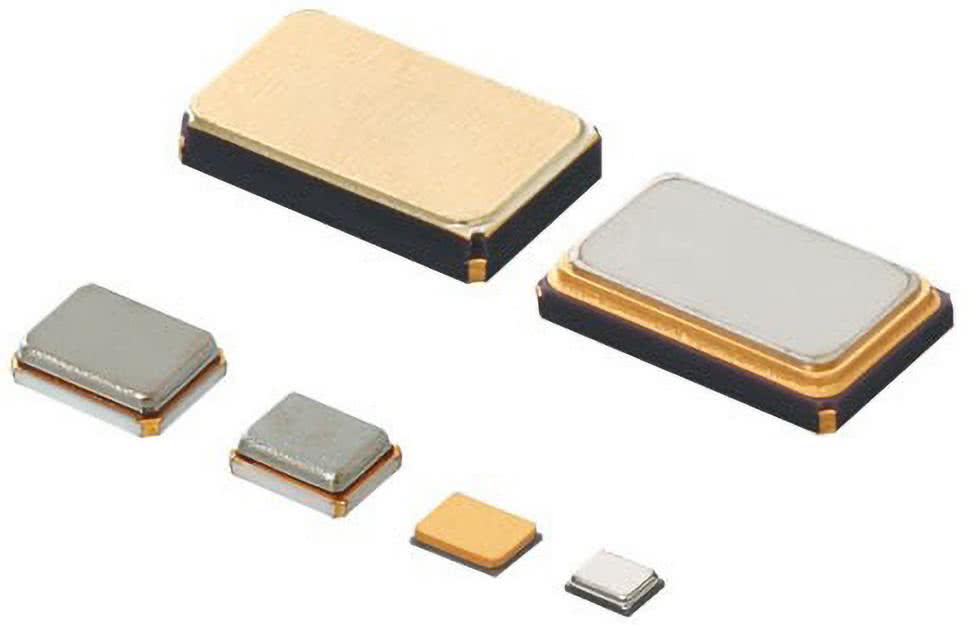
Obecnie najczęściej używane są rezonatory wykonane w technologii AT-cut oraz tuning fork. Pierwsze z nich bazują na płytce o regularnym kształcie (okrągłej lub prostokątnej), z elektrodami planarnymi umieszczonymi na obu powierzchniach (fotografia 3). Rezonatory AT-cut występują w szerokim zakresie częstotliwości, zwykle od 1 MHz do kilkudziesięciu, a nawet kilkuset MHz – do tej grupy należą m.in. popularne „kwarce” w obudowach z serii HC-49 i HC-49 U (rezonatory przewlekane w obudowach „wysokich”), HC-49 S
(potocznie określane jako „niski HC49”), a także liczne rezonatory SMD typu HC-49 SM oraz znacznie bardziej kompaktowe wykonania niskoprofilowe (fotografia 4). Szeroki zakres częstotliwości sprawia, że to właśnie ta grupa rezonatorów jest zdecydowanie najszerzej stosowana m.in. do taktowania mikrokontrolerów.
Podczas gdy płytki AT-cut wykorzystują drgania ścinające (thickness-shear vibrations), rezonatory typu tuning-fork, jak sama nazwa wskazuje, działają w sposób bardzo zbliżony do popularnego kamertonu. Co więcej – rozwidlony kształt płytki kwarcowej (fotografia 5) do złudzenia przypomina ten prosty przyrząd, używany do strojenia instrumentów muzycznych.

Rezonatory typu tuning-fork są spotykane w segmencie popularnych, zegarkowych źródeł częstotliwości wzorcowej w wersji przewlekanej (w postaci niewielkich, podłużnych walców o średnicy rzędu 1...2 mm), systemy wbudowane korzystają natomiast z niewielkich rezonatorów w obudowach do montażu SMT (fotografia 6).

Podstawowy układ pracy oscylatora kwarcowego
Zasada działania rezonatora kwarcowego opiera się na rezonansie mechanicznym płytki kwarcowej, który dzięki właściwościom piezoelektrycznym jest niejako „sprzężony” z rezonansem elektrycznym – impedancja rezonatora maleje bowiem drastycznie przy zbliżaniu się do częstotliwości charakterystycznej. W codziennej praktyce konstruktorskiej niemal wszystkie aplikacje rezonatorów kwarcowych są zatem zbudowane w oparciu na oscylatorze harmonicznym Pierce-Gate, którego schemat prezentuje rysunek 1.
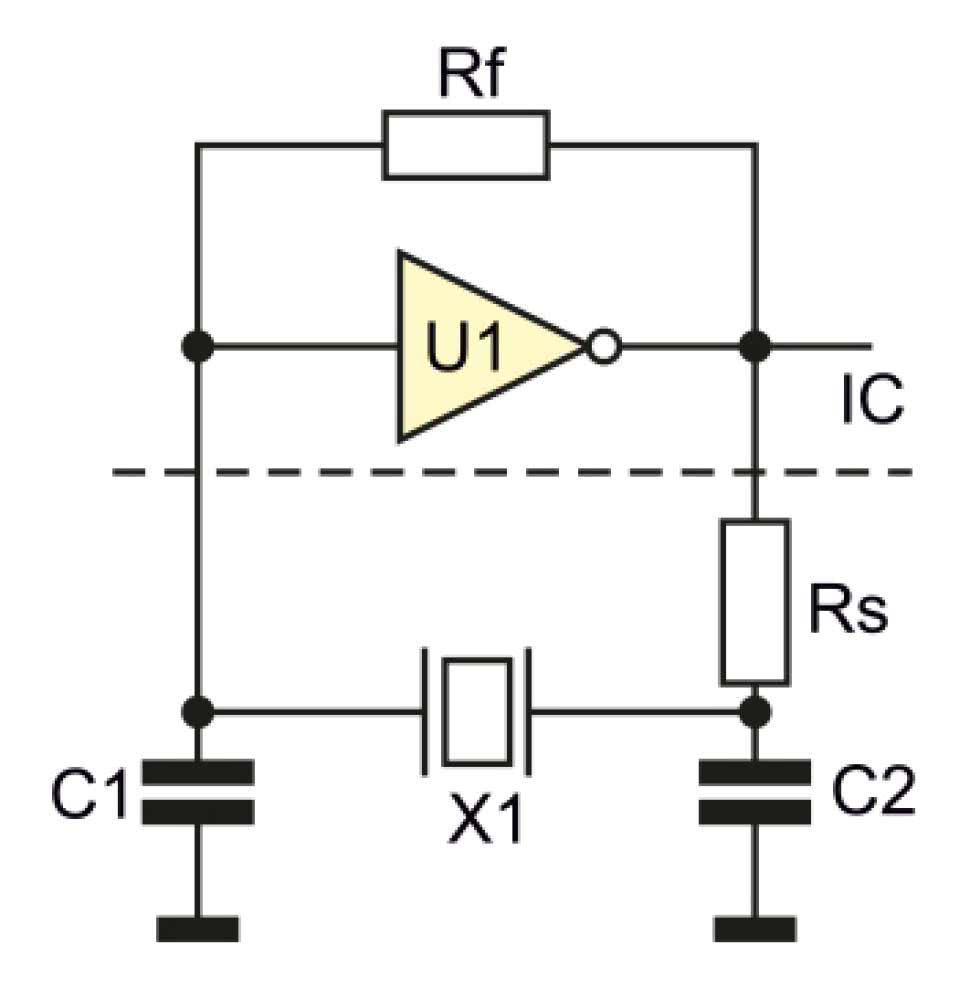
Układ ten wykorzystuje ujemną rezystancję dynamiczną rezonatora, który, co ciekawe, prezentuje sobą nie tylko pewne pojemności wewnętrzne (co nie dziwi z uwagi na planarną budowę płytki kwarcowej), ale także rezystancję szeregową (ESR) oraz… indukcyjność. To właśnie w indukcyjnym zakresie krzywej reaktancyjnej operują rezonatory kwarcowe, stosowane w układzie Pierce-Gate. Dwa kondensatory (C1 i C2 na rysunku 1), określane jako pojemność obciążenia (load – CL), są niezbędne do stworzenia właściwych warunków pracy układu rezonansowego – wraz z rezystancją szeregową Rs oraz rezonatorem wprowadzają łączne przesunięcie fazy o około 180°, co w połączeniu z przesunięciem samego negatora daje łącznie 360°. A takie właśnie przesunięcie, w połączeniu ze wzmocnieniem pętli sprzężenia zwrotnego większym lub równym jedności, stanowi spełnienie tzw. kryteriów oscylacji Barkhausena, umożliwiających utrzymanie niegasnących, stabilnych drgań rezonansowych. Dobroć rezonatorów kwarcowych osiąga wartości na poziomie od kilkudziesięciu do nawet kilkuset tysięcy, co dodatkowo wspomaga oscylacje.
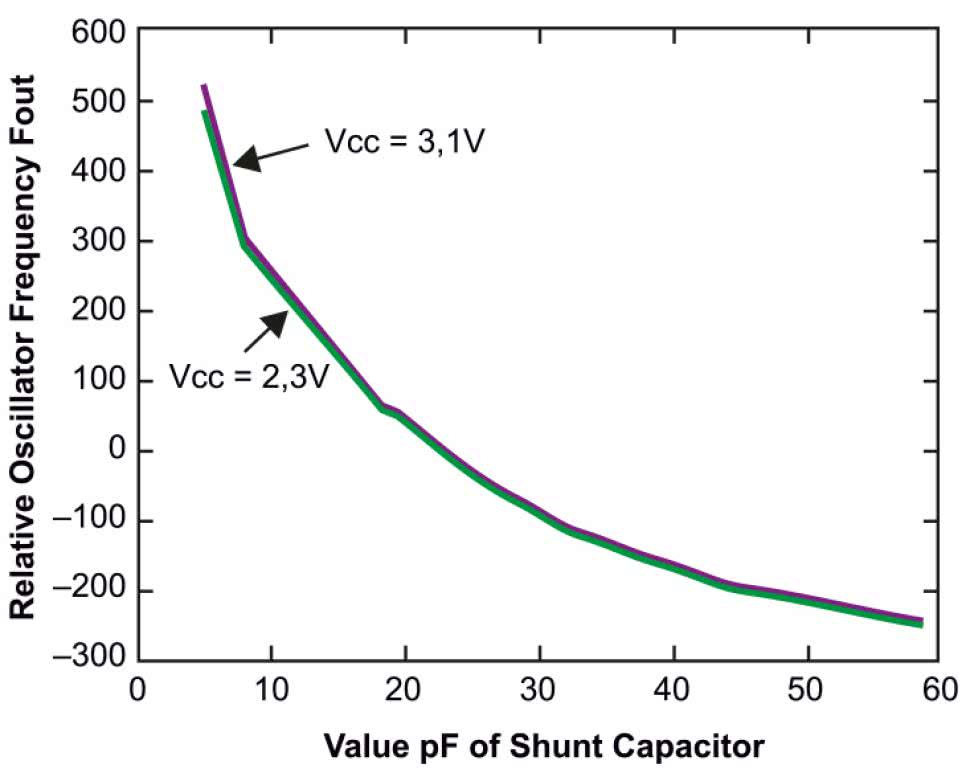
Co bardzo ważne – wartość kondensatorów wpływa istotnie na dokładną częstotliwość generowanych drgań (rysunek 2). O ile bowiem opisane wcześniej parametry geometryczne – kształt, rozmiary, a zwłaszcza grubość płytki – decydują w największym stopniu o częstotliwości rezonansowej, o tyle dokładna wartość tego parametru jest automatycznie kalibrowana w procesie produkcyjnym za pomocą wiązki laserowej, trawienia, itd. właśnie w układzie o ściśle określonej wartości pojemności obciążenia. Dlatego też producenci oscylatorów podają zalecaną pojemność CL, przy jakiej element generuje częstotliwość możliwie najbliższą wartości nominalnej. I to dla… określonej temperatury otoczenia (zwykle pokojowej, tj. 25°C), gdyż to właśnie warunki termiczne są kolejnym czynnikiem silnie warunkującym częstotliwość pracy rezonatorów kwarcowych.
Znaczenie i dobór elementów dyskretnych oscylatora
Kondensatory obciążenia (CL) – poszczególne dielektryki stosowane w kondensatorach wielowarstwowych do montażu powierzchniowego (MLCC) różnią się znacząco charakterystyką pojemności w funkcji temperatury. Z tego względu należy stosować elementy o możliwie małej zależności od warunków termicznych – jednym z najczęściej zalecanych dielektryków jest ceramika C0G (NP0), należąca do dielektryków tzw. I klasy. Z uwagi na niewielką przenikalność względną znaczna część niewielkich kondensatorów oferowanych obecnie przez dystrybutorów komponentów pasywnych jest wykonywana właśnie z tego typu izolatorów – nic nie stoi zatem na przeszkodzie, by wykorzystywać kondensatory C0G w roli pojemności obciążenia rezonatorów.
Rezystor szeregowy (Rs) – szeregowy rezystor, zalecany zwykle w układach oscylatorów Pierce-Gate, pełni trzy zasadnicze funkcje. Nie tylko oddziela wyjście negatora od złożonej impedancji, tworzonej przez rezonator oraz pojemności obciążenia, ale także redukuje moc wysterowania rezonatora i wprowadza (wraz z najbliższym kondensatorem, tj. C2 wg rysunku 1) – dodatkowe przesunięcie fazy, przydatne zwłaszcza w zakresie niskich częstotliwości. Rs jest szczególnie zalecany w układach pracy rezonatorów tupu tuning-fork z uwagi na ich znikomą wytrzymałość w funkcji mocy wysterowania. Zwykle wartość rezystora Rs plasuje się na poziomie kilkudziesięciu...kilkuset kiloomów. Warto dodać, że w aplikacjach ultra low-power poziom mocy wysterowania rezonatora okazuje się często bardzo istotny. Co więcej, optymalizacja ilości energii traconej przez oscylator pozwala nie tylko zmniejszyć zapotrzebowanie urządzenia pod względem prądu zasilania (co ma znaczenie zwłaszcza w obwodach podtrzymujących pracę zegarów RTC), ale także uniknąć niepożądanych efektów, wynikających z nieliniowego zachowania rezonatora przy dużej mocy.
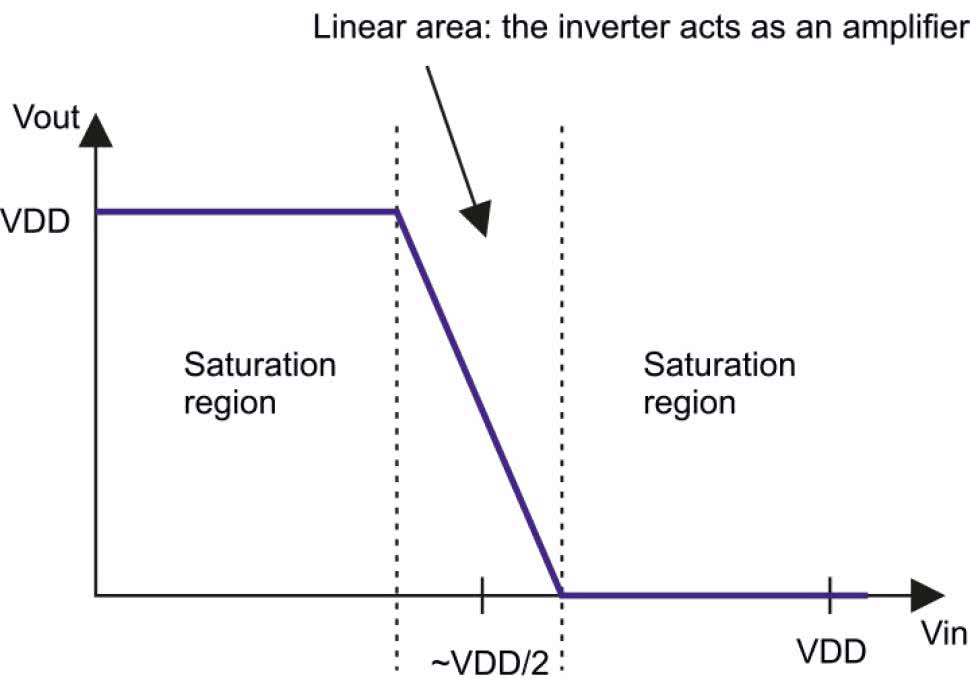
Rezystor sprzężenia zwrotnego (Rf) – zadaniem rezystora Rf jest wprowadzenie ujemnego sprzężenia zwrotnego, które linearyzuje negator, lub – innymi słowy – przesuwa jego punkt pracy do zakresu liniowego, „rozciągniętego” w porównaniu do negatora pozbawionego sprzężenia i czyni go w ten sposób... prostym wzmacniaczem CMOS (rysunek 3). Zalecana wartość rezystora Rf maleje wraz z częstotliwością pracy – przykładowe orientacyjne zakresy zostały pokazane w tabeli 1.

Inne realizacje układowe oscylatorów kwarcowych
Opisany powyżej układ Pierce-Gate – jakkolwiek bez wątpienia najbardziej rozpowszechniony na świecie dzięki systemom wbudowanym, nie jest jednak jedyną możliwą realizacją układu generatora, bazującego na rezonatorze kwarcowym. W literaturze można spotkać liczne schematy generatorów, które w roli elementów aktywnych zawierają bramki logiczne, wzmacniacze operacyjne, komparatory, a nawet komponenty dyskretne – tranzystory bipolarne lub polowe. Ciekawą kolekcję takich rozwiązań zaprezentowała firma Linear Technology w nocie aplikacyjnej pt. Circuit Techniques for Clock Sources z 1985 roku – na rysunkach 4...7 przywołujemy kilka ciekawych przykładów.
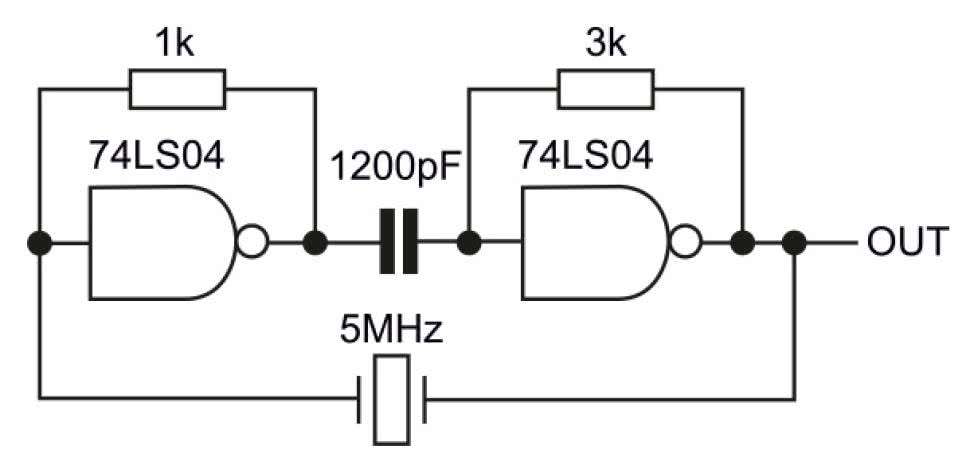
Rysunek 4 prezentuje prosty, dwubramkowy oscylator z dwupoziomowym sprzężeniem zwrotnym. Rezystory o wartościach 1 kΩ i 3 kΩ linearyzują poszczególne bramki, które połączone są ze sobą zmiennoprądowo za pomocą kondensatora. Całość układu jest zamknięta drugą pętlą sprzężenia zwrotnego, w którego roli występuje sam oscylator. Warto zwrócić uwagę, że kryterium fazy Barkhausena zostało tutaj spełnione dzięki 180-stopniowym przesunięciom fazy, wprowadzanym przez połączone kaskadowo bramki – całość oferuje zatem niezbędne przesunięcie równe 360°. Układ jest przeznaczony do pracy z elementami typu AT-cut.
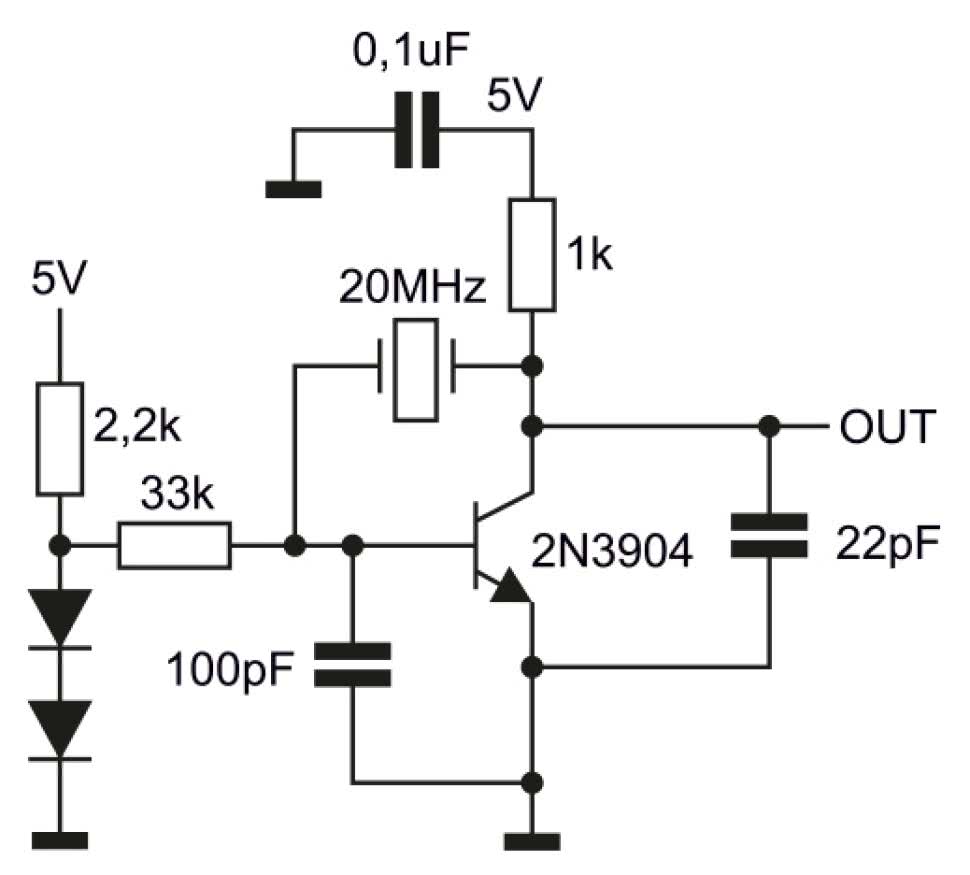
Prosty generator Pierce’a pokazany na rysunku 5 uważnym Czytelnikom przywoła na myśl schematy, doskonale znane z podręczników elektroniki sprzed kilku dekad. W gruncie rzeczy, sam układ działa na niemal identycznej podstawie, jak opisany szeroko układ Pierce-Gate – w roli zlinearyzowanego negatora o 180-stopniowym przesunięciu fazy pracuje tutaj pojedynczy tranzystor bipolarny, spolaryzowany prostym źródłem prądowym tworzonym przez szeregowe diody, rezystory 2,2 kΩ i 33 kΩ oraz złącze baza-emiter tranzystora.
Dodatkowe przesunięcie wprowadzają kondensatory 100 pF i 22 pF. Bardzo podobny układ, lecz z polaryzacją stałonapięciową w postaci dzielnika napięcia, zaprezentowała w jednej z not aplikacyjnych także firma National Instruments.
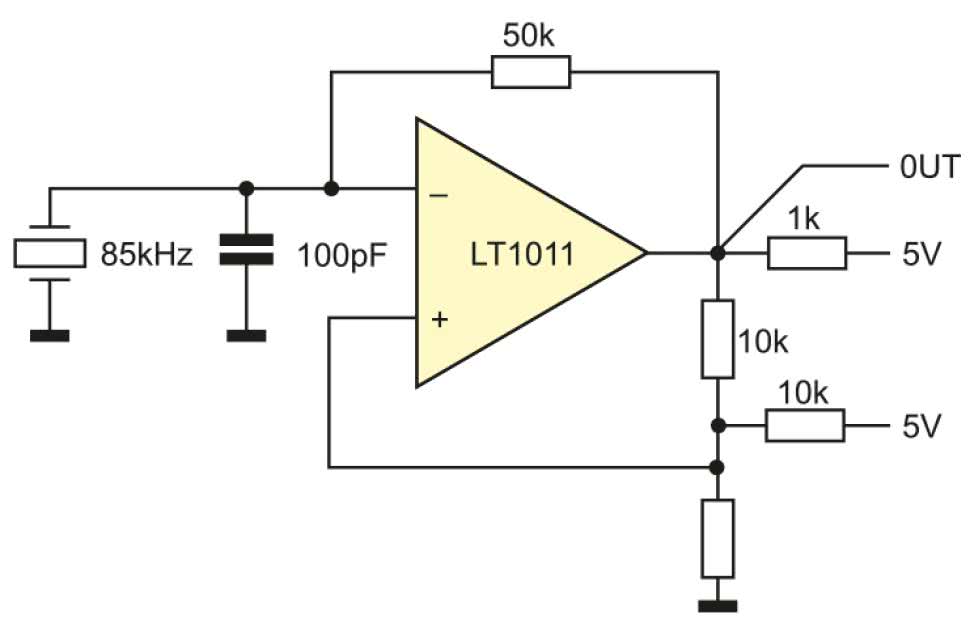
Układ z rysunku 6 bazuje na scalonym komparatorze i – co ciekawe – należy do grupy oscylatorów relaksacyjnych (w odróżnieniu od harmonicznych, wśród których prym wiedzie topologia Pierce’a). Klasyczny schemat generatora RC, znany z licznych not aplikacyjnych i podręczników, został tutaj wzbogacony rezonatorem, włączonym równolegle do kondensatora tworzącego układ RC z rezystorem sprzężenia zwrotnego. Wartości elementów pasywnych układu dobrane zostały w taki sposób, by samorzutna relaksacja multiwibratora (tj. bez obecności rezonatora) była nieznacznie szybsza (5...10%) niż nominalna częstotliwość rezonatora – zbliżenie do punktu rezonansu powoduje „podkradanie” energii z układu RC, co wymusza generowanie przez układ oscylacji o pożądanej częstotliwości.
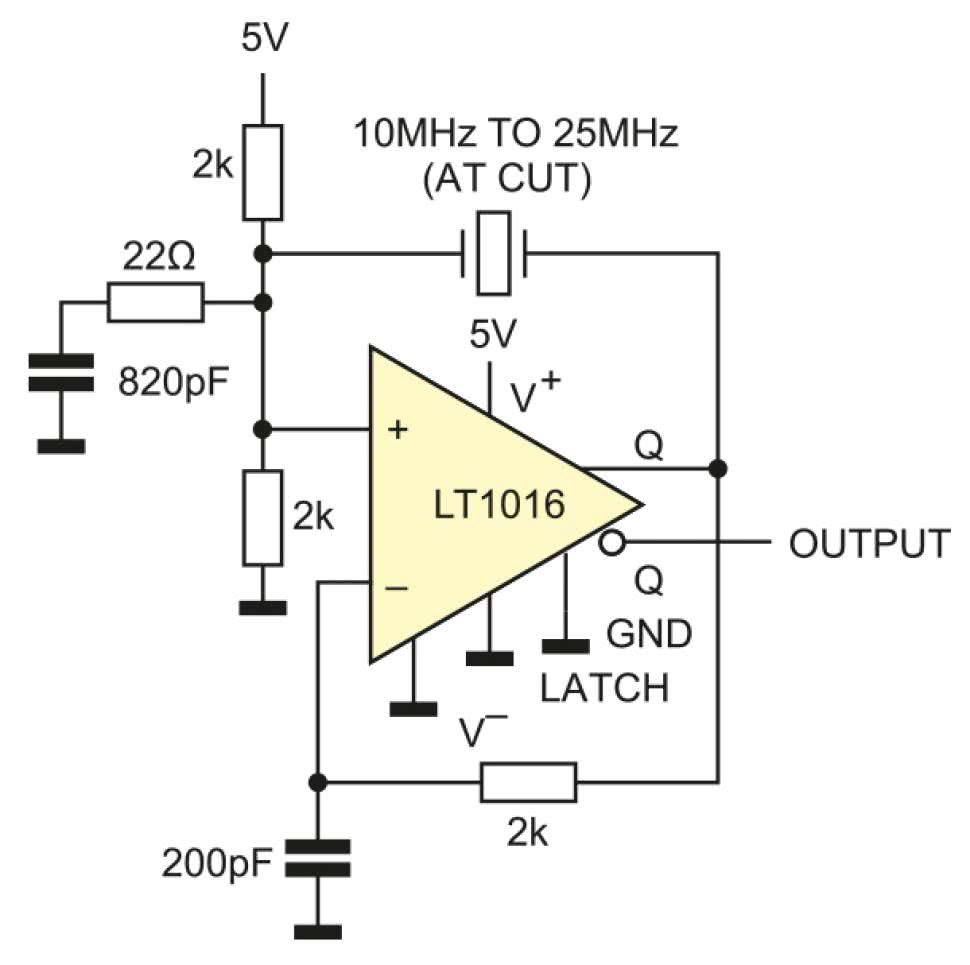
Warto przeanalizować także topologię przedstawioną na rysunku 7 – bez rezonatora układ byłby „zwyczajnym”, szerokopasmowym wtórnikiem napięcia o GBW na poziomie 50 GHz. Włączenie oscylatora kwarcowego pomiędzy wyjście komparatora a dzielnik napięcia, polaryzujący jego wejście nieodwracające, wprowadza do układu dodatnie sprzężenie zwrotne, „faworyzujące” częstotliwość rezonansową rezonatora i wymuszające rozpoczęcie generowania oscylacji. Dodatkowa sieć RC złożona z rezystora 22 Ω i kondensatora 820 pF tłumi wyższe częstotliwości, nie dopuszczając do pracy rezonatora w tzw. trybie overtone, czyli z częstotliwością harmoniczną wyższego rzędu (ten tryb pracy bywa jednak czasem używany w układach bazujących na rezonatorach AT-cut).
Hybrydowe generatory kwarcowe
Dyskretne rezonatory kwarcowe są używane przez projektantów elektroniki często bez głębszego zastanowienia nad zapewnieniem im właściwych warunków pracy. Wyjaśnienie tego faktu jest dość prozaiczne – w większości przypadków wstawienie do układu „kwarcu” z dwoma kondensatorami o typowej wartości z przedziału 18...22 pF doskonale spełnia swoje zadanie i to bez konieczności wykonywania jakichkolwiek dodatkowych zabiegów projektowych w tym zakresie. Jedną z przyczyn takiego stanu rzeczy jest też fakt, że coraz bardziej zaawansowane obwody taktowania, stosowane w mikrokontrolerach i procesorach aplikacyjnych, doskonale radzą sobie z rozpoczęciem i podtrzymaniem oscylacji, zapewniając także dodatkowe funkcje kontrolne, np. w postaci sprzętowych bloków nadzoru (CSS w przypadku procesorów STM32).
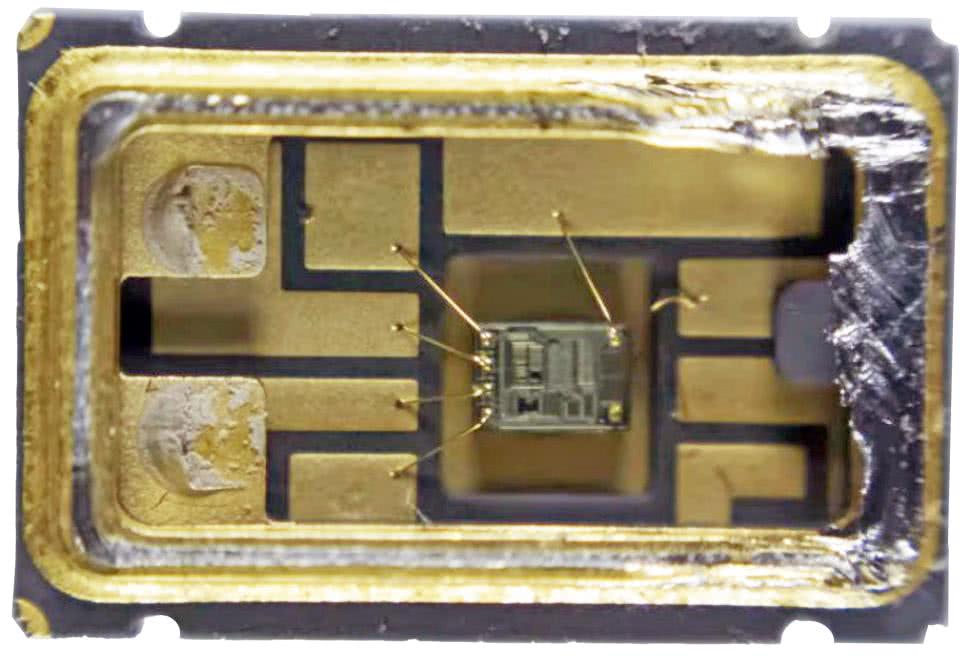
Warto jednak wiedzieć, że sumiennie i dokładnie przeprowadzony proces projektowania układu pracy rezonatora wraz z wyczerpującym programem testów mogą uchronić projekt od klęski, spowodowanej awarią w najmniej oczekiwanym momencie. Prostszą metodą na zapewnienie niezawodności przez ominięcie pułapek związanych z zawiłościami fizyki oscylatorów, a dodatkowo dającą korzyści w postaci redukcji liczby elementów dyskretnych, jest zastosowanie hybrydowego oscylatora kwarcowego. Komponenty takie zawierają w swojej strukturze zarówno sam rezonator, jak i niezbędne układy aktywne zapewniające poprawny start i podtrzymanie oscylacji, zaś do ich pracy wymagane jest jedynie podanie zasilania oraz (ewentualnie) podłączenie dodatkowego, zewnętrznego kondensatora odsprzęgającego. Dawniej powszechnie stosowane były dość duże oscylatory w metalowych obudowach, przeznaczonych do montażu przewlekanego (fotografia 7) – dziś zostały one w dużej mierze wyparte przez miniaturowe oscylatory SMD, w których część półprzewodnikowa to już nie konwencjonalny układ scalony, ale struktura krzemowa bezpośrednio podłączona do wyprowadzeń ceramicznej obudowy techniką bondingu (fotografia 8).
Gotowe oscylatory kwarcowe występują w szerokim zakresie częstotliwości, od kiloherców do nawet kilkuset megaherców. Do zalet tych układów, oprócz uproszczenia procesu projektowania i zmniejszenia liczby elementów dyskretnych, można zaliczyć także dość szeroki wybór wersji napięciowych (zwykle od 1,8 V do 5 V). Istotną wadą wielu oscylatorów jest natomiast relatywnie duży pobór prądu – wersje określane jako low-power w istocie mogą pobierać nawet kilka mA prądu zasilania. Do układów wymagających pracy w trybie obniżonego poboru mocy z podtrzymaniem bateryjnym lub superkondensatorowym, a w czasie normalnej pracy zasilanych z „większego” źródła (np. sieciowego), warto wybrać oscylator z wyprowadzonym sygnałem zezwolenia, umożliwiającym wyłączenie generatora przed przejściem mikrokontrolera do trybu ultra-low power. Przykładowo, oscylator SiT1602 B marki SiTime w czasie normalnej pracy przy napięciu zasilania 1,8 V pobiera aż 3,5 mA, jednak w trybie uśpienia zapotrzebowanie spada do zaledwie 0,6 μA (max. 1,3 μA), co może już być akceptowalne w wielu praktycznych aplikacjach. Opisywany model występuje w szerokiej gamie obudów SMD, począwszy od rozmiaru, 2,0×1,6 mm, a skończywszy na 7,0×5,0 mm.
Wpływ temperatury
Wspomniany wcześniej silny wpływ warunków otoczenia na pracę rezonatorów kwarcowych zobrazowano na rysunku 8, prezentującym zależność częstotliwości względnej (odniesionej do wartości nominalnej) od temperatury. Jak widać, w przypadku rezonatorów typu tuning-fork charakterystyka ma postać paraboliczną, z wierzchołkiem kalibrowanym (co nie dziwi) dla temperatury pokojowej.
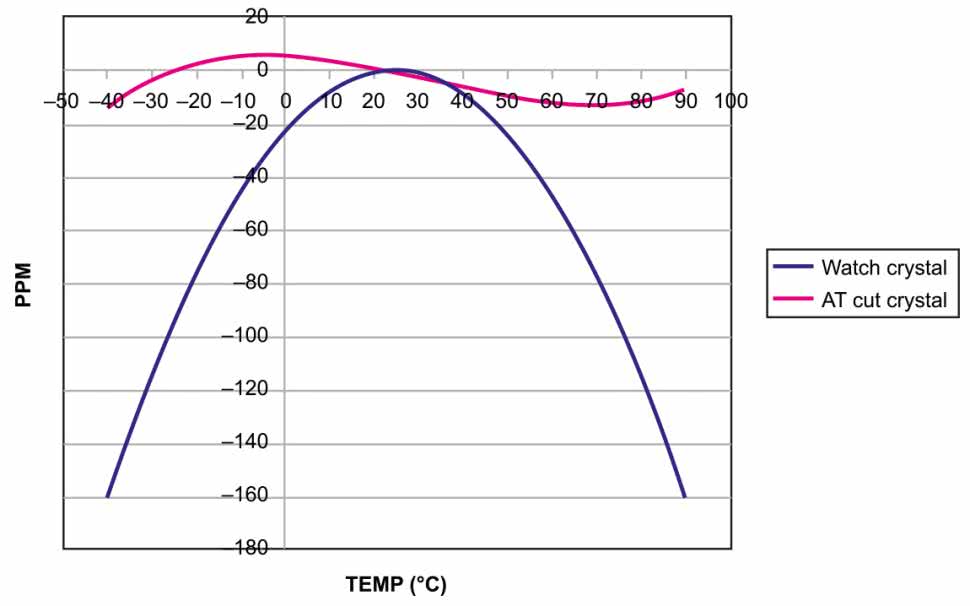
Z kolei rezonatory typu AT-cut oferują diametralnie inny kształt oraz amplitudę charakterystyki termicznej – choć prezentują one znacznie niższą podatność na odchyłki spowodowane ogrzewaniem lub schładzaniem, w precyzyjnych urządzeniach telekomunikacyjnych lub pomiarowych nawet te, pozornie niewielkie, wahania są absolutnie niedopuszczalne. Konkluzja taka doprowadziła do powstania dwóch grup oscylatorów, które nieporównanie lepiej radzą sobie z utrzymaniem stabilnej częstotliwości w zmiennych warunkach pracy – mowa o TCXO i OCXO.
Oscylatory TCXO
Określenie to oznacza Temperature Compensated Crystal Oscillator – czyli realizują elektroniczną kompensację wahań temperatury za pomocą elementów termoczułych, sterujących pracą aktywnego układu przestrajania. Układ ten działa zwykle dzięki zmianie pojemności obciążenia, co – jak wiadomo z wcześniejszej części artykułu – jest w stanie wpływać na niewielkie przesunięcie częstotliwości rezonansowej oscylatora. W naturalny sposób układy TCXO korzystają zatem z warikapów – diod pojemnościowych przestrajanych napięciowo. Przykładowy schemat TCXO, wykonanego z elementów dyskretnych, został pokazany na rysunku 9.

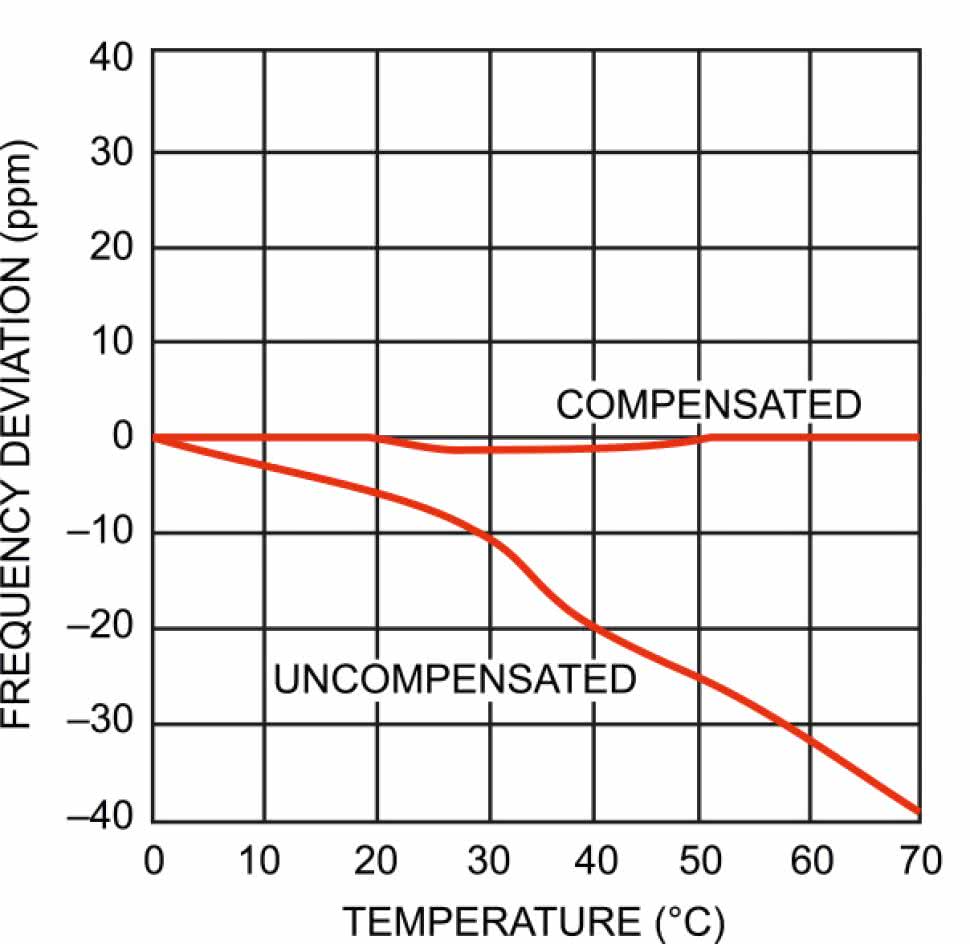
Wzmacniacze A1 i A2 zapewniają odpowiednie wzmocnienie oraz offset napięcia panującego na termistorze RT – sygnał wyjściowy wzmacniacza A2 jest następnie podawany przez rezystor 100 kΩ na diodę pojemnościową MV-209, która przestraja w niewielkim zakresie oscylator kwarcowy, zbudowany na bazie tranzystora BJT. Generator jest buforowany za pomocą komparatora LT319 A, zapewniającego kształtowanie wyjściowego sygnału prostokątnego. Co ciekawe, układ ten, mimo iż powstał w połowie lat 80. ubiegłego wieku, zapewniał doskonałą stabilizację temperatury, co uwidoczniono na rysunku 10 – podczas gdy początkowy dryf częstotliwości oscylatora dochodził do 40 ppm w zakresie 0...70°C, konstruktorom układu udało się uzyskać poprawkę częstotliwości z odchyłką maksymalną 2 ppm. Dziś najlepsze oscylatory TCXO, wykonane w obudowach ceramicznych SMD, do złudzenia przypominających miniaturowe rezonatory i generatory kwarcowe, osiągają dokładność stabilizacji częstotliwości na poziomie ±1 ppm, ±0,5 ppm, a nierzadko nawet 0,1 ppm i to w pełnym zakresie temperatur roboczych.
Oscylatory OCXO
Doskonałe dokładności osiągane przez oscylatory z kompensacją temperaturową w niektórych zastosowaniach są nadal niewystarczające. Problem dotyczy głównie (choć nie tylko) urządzeń pracujących w trudnych warunkach, przy dużej zmienności temperatur, a nierzadko także w narażeniu na wstrząsy i wibracje. Słusznym skojarzeniem będą tutaj wszelkiej maści technologie wojskowe – sprzęt radiokomunikacyjny, systemy radarowe, czy też systemy zarządzania polem walki – a także przemysł lotniczy i kosmiczny. W tych aplikacjach zastosowanie znajdują oscylatory OCXO (Oven Controlled Crystal Oscillator). W ich przypadku mamy już do czynienia nie tylko z precyzyjnym strojeniem fabrycznym, ale także aktywną regulacją temperatury rezonatora kwarcowego, korzystającą z miniaturowego termostatu oraz układu grzałek, sprzężonych termicznie z obudową rezonatora. Budowę przykładowego OCXO obrazuje schemat, zaczerpnięty z wielokrotnie już przywoływanej noty aplikacyjnej Linear Technology (rysunek 11).

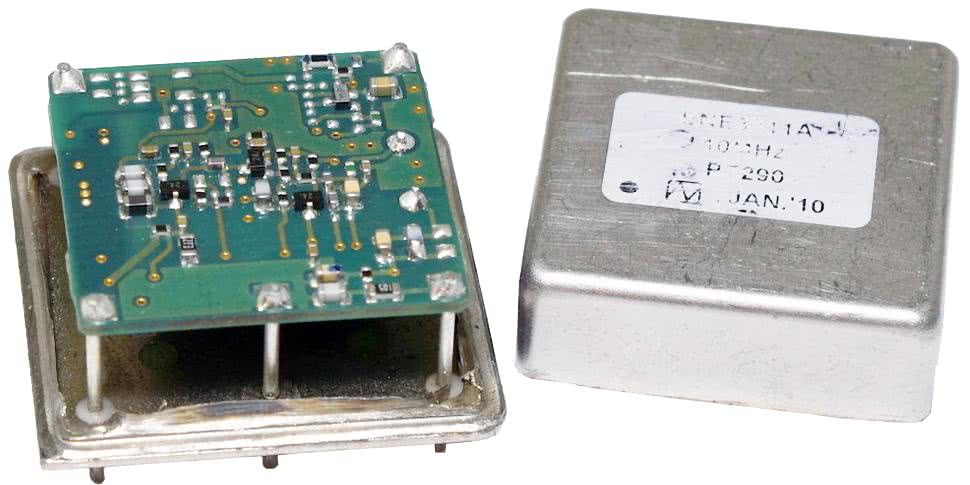
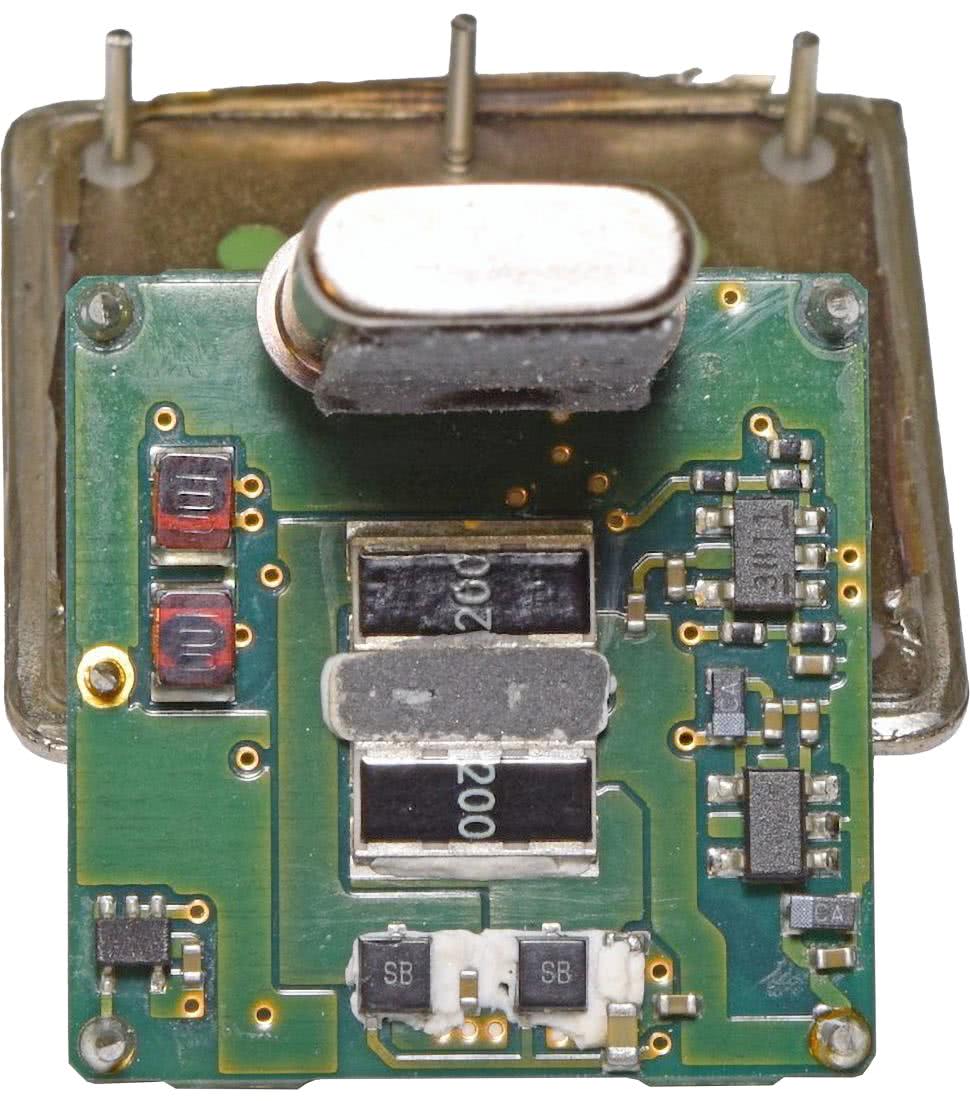
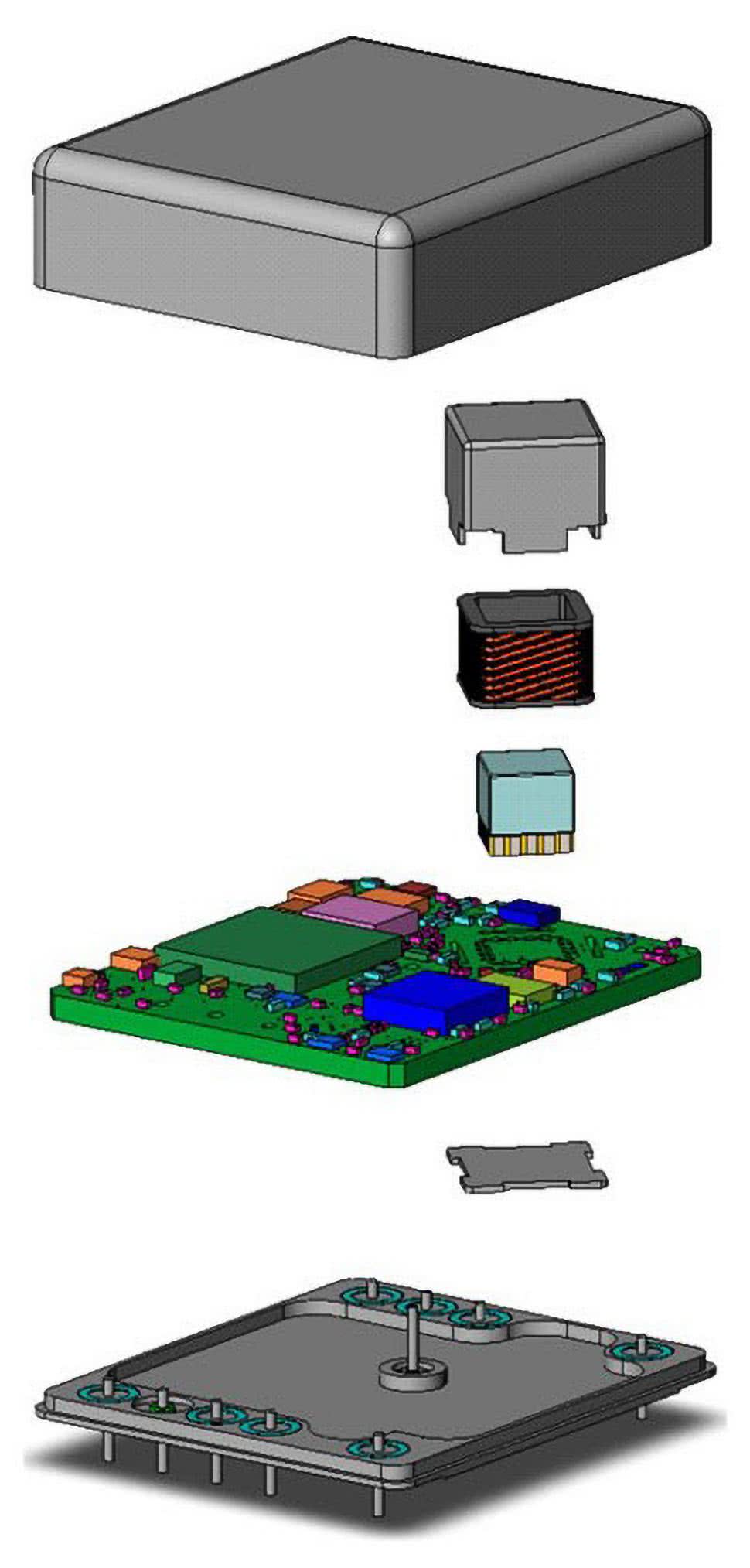
Choć współczesne OCXO bazują już na nieco innych rozwiązaniach układowych, zwłaszcza w zakresie części oscylacyjnej, to zasada działania pozostaje niezmienna – precyzyjny termostat reguluje w pętli ujemnego sprzężenia zwrotnego temperaturę grzałek oporowych, korzystając z wbudowanego czujnika temperatury, znajdującego się także w ścisłym otoczeniu samego rezonatora. Wnętrze nowoczesnego OCXO można zobaczyć na fotografiach 9 i 10.
Współczesne oscylatory z kontrolą termostatową zapewniają coraz lepsze parametry i to nie tylko pod względem stabilności temperaturowej (w przypadku serii OX-400/401 marki Microsemi – wykupionej przez Microchipa – dochodzi ona już nawet do poziomu ±5 ppb w przemysłowym zakresie temperatur), ale także tolerancji wstępnej (±0,2 ppm) i stabilności długoczasowej (efekt starzenia na poziomie ±1000 ppb przez 10 lat). Czas wstępnego nagrzewania – jako parametr, będący największą wadą OCXO obok dużego poboru mocy – dziś kształtuje się na poziomie kilkudziesięciu sekund, co jest naprawdę niezłym wynikiem. Co ważne, współczesne oscylatory tego typu oferują możliwość zasilania napięciem na poziomie logiki układów scalonych (3,3...5 V), występują ponadto w obudowach SMD, co znakomicie upraszcza proces automatycznego montażu seryjnego (fotografia 11).

Oscylatory VCXO
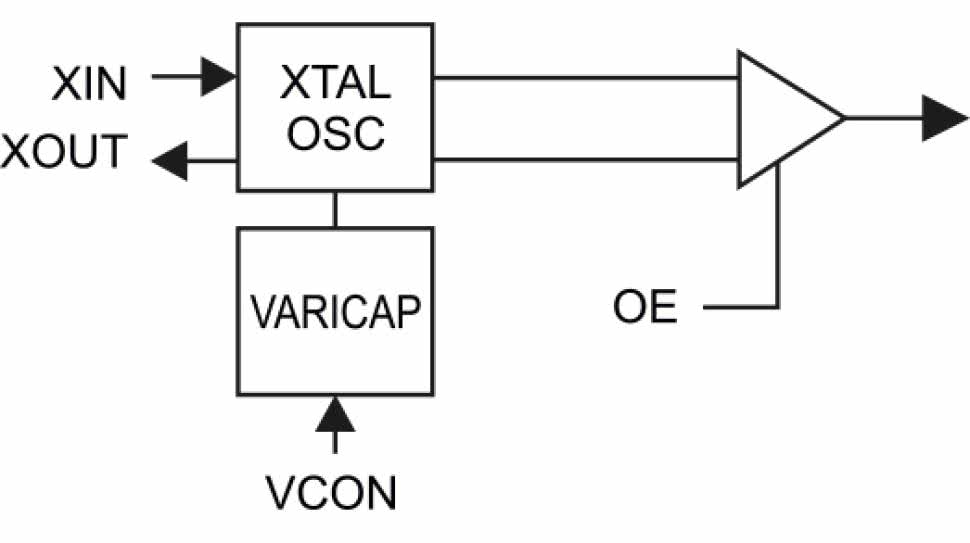
Osobną kategorię źródeł częstotliwości wzorcowej stanowią oscylatory VCXO (Voltage Controlled Crystal Oscillator). Od strony technicznej VCXO są zbliżone do TCXO, przy czym przestrajanie odbywa się z użyciem zewnętrznego napięcia sterującego, dostarczanego przez jedno z wyprowadzeń układu – nie zaś, jak miało to miejsce w TCXO, za pomocą wbudowanych obwodów analogowych. Z uwagi na niewielki zakres przestrajania (na poziomie ±100...200 ppm) ten typ układów wykorzystywany jest przede wszystkim w roli generatora VCO w wąskopasmowych pętlach PLL, dekoderach telewizyjnych, dekoderach MPEG, urządzeniach mikrofalowych czy też teleinformatycznych. Innym zastosowaniem VCXO są generatory stałej częstotliwości referencyjnej, które z uwagi np. na zmienne warunki środowiska wymagają elektronicznej kalibracji, dokonywanej bez fizycznej ingerencji w układ elektroniczny – wszak do wysterowania wejścia VCXO można użyć np. przetwornika DAC lub potencjometru cyfrowego. Oscylatory VCXO występują zarówno w wersjach gotowych (najczęściej stosowane są obudowy ceramiczne, znane z rezonatorów i generatorów SMD), jak i w postaci układów scalonych przeznaczonych do współpracy z zewnętrznym „kwarcem” – przykładem takiego układu może być PL500-37 marki Micrel, oferowany w obudowach SO-8, SOT23-6 oraz w postaci wafla krzemowego. Wykonany w technologii CMOS układ współpracuje z rezonatorami o częstotliwości od 36 do 130 MHz i może być zasilany napięciem 2,5 V lub 3,3 V. Schemat blokowy tego prostego układu został pokazany na rysunku 12.
Oscylatory MEMS
Najnowszą odmianą lokalnych wzorców częstotliwości są oscylatory MEMS, stopniowo zdobywające popularność w różnego rodzaju aplikacjach, co ważne – także w zastosowaniach wymagających najwyższej stabilności i niezawodności. Jako nowsi następcy klasycznych oscylatorów kwarcowych, generatory MEMS są oferowane zarówno w zakresie niskich częstotliwości (w tym 32,768 kHz), jak i w paśmie rzędu kilkunastu, kilkudziesięciu, a nawet kilkuset megaherców. Warto zwrócić uwagę, że najszybsze oscylatory wykorzystują strukturę MEMS tylko jako wewnętrzny wzorzec, zaś częstotliwość wyjściowa jest generowana za pośrednictwem wbudowanej pętli synchronizacji fazowej.
Wśród omawianych układów znaleźć można zarówno proste oscylatory do powszechnie dostępnych urządzeń konsumenckich, jak i wyspecjalizowane, wysokiej klasy źródła częstotliwości dla najbardziej wymagających aplikacji. Do tych pierwszych zalicza się np. niewielki generator SiT2001 B marki SiTime, dostępny w obudowie SOT23-5 i oferujący (w zależności od wersji) dowolną częstotliwość w zakresie od 1 MHz do 110 MHz, utrzymywaną ze stabilnością nie gorszą niż 20...50 ppm w pełnym, przemysłowym zakresie temperatur (–40...+85°C – rysunek 13).
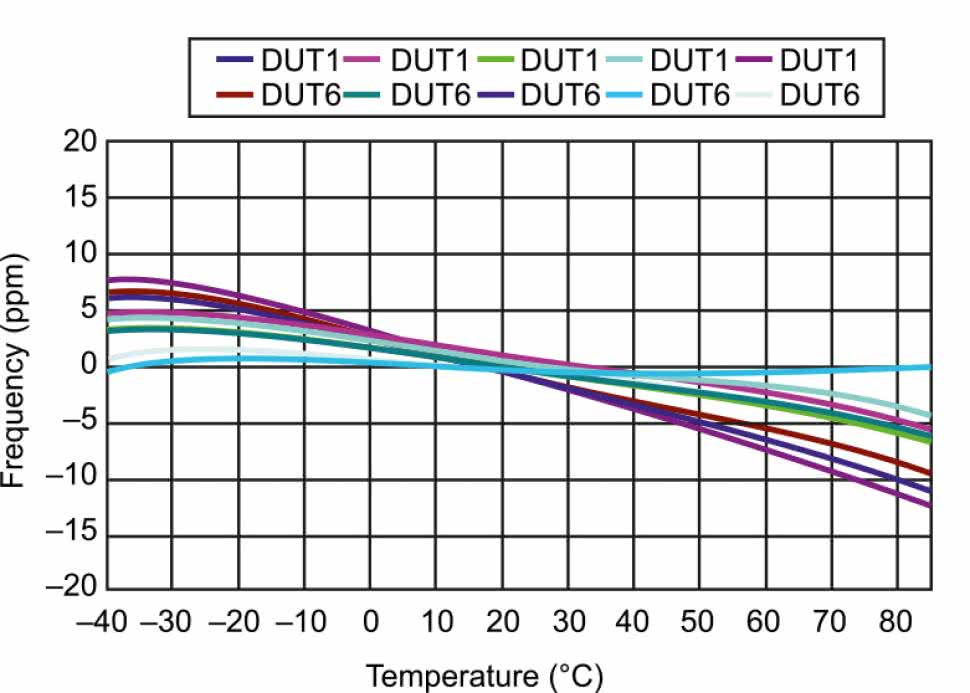
Krótki czas rozruchu (do 5 ms), szeroki zakres napięć zasilających (od 1,8 do 3,3 V) oraz funkcja wyłączania wyjścia lub usypiania całego układu (wybierana przy zakupie) sprawiają, że układ stanowi doskonały i co ważne, ekonomiczny zamiennik klasycznych „kwarców” w układach mikroprocesorowych niewymagających stabilności na poziomie TCXO (lub jeszcze lepszej).
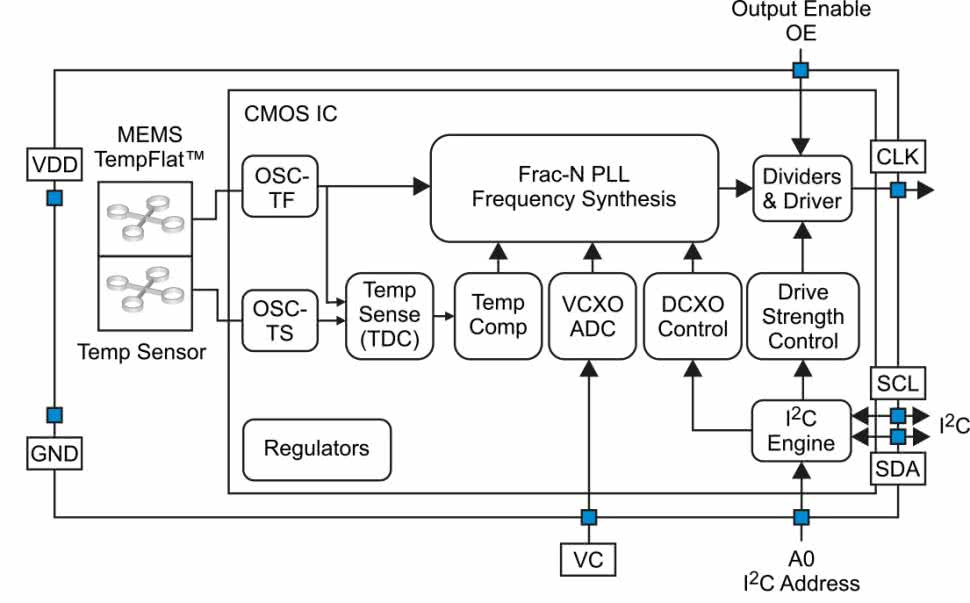
Innym, niezwykle ciekawym przykładem generatora scalonego w technologii mikroelektromechanicznej jest układ SiT5348 tego samego producenta (fotografia 9). Ten doskonale dopracowany i silnie rozbudowany układ (schemat blokowy został pokazany na rysunku 14) oferuje ultraprecyzyjną stabilizację częstotliwości ±50 ppb w zakresie 0…+70°C!, niski jitter na poziomie 0,31 ps oraz niebywałą wprost odporność na wibracje i przeciążenia – dryf częstotliwości w funkcji narażeń mechanicznych to zaledwie 0,009 ppb/g. Co ciekawe, SiT5348 występuje w trzech wersjach: jako klasyczne TCXO (ze stałą częstotliwością oscylacji), VCTCXO (czyli… TCXO przestrajane napięciowo, stanowiące zatem „lepszą” wersję VCXO) oraz DCTCXO.

Ta ostatnia pozwala na regulację częstotliwości wyjściowej za pomocą komend, przesyłanych przez interfejs I2C. Uważny Czytelnik zauważy jednak, że w strukturze pokazanej na rysunku 14 mamy do czynienia już nie z prostą pętlą PLL, ale… syntezerem częstotliwości. Warto zatem poświęcić nieco uwagi metodom przetwarzania i dystrybucji sygnałów zegarowych.
Przetwarzanie sygnałów zegarowych
Praktycznie nigdy nie zdarza się, by samo tylko źródło częstotliwości mogło funkcjonować jako osobne, samodzielne urządzenie – wyjątkiem są rzecz jasna moduły zegarów referencyjnych, stosowane w wysokiej klasy aparaturze pomiarowej, telekomunikacyjnej czy wojskowej, choć i te nie byłyby w stanie zbyt wiele zdziałać bez „napędzanych” przez nie systemów. W codziennej pracy inżynierskiej mamy zatem do czynienia z układami, których celem jest przetwarzanie częstotliwości odniesienia do postaci użytecznej w danej aplikacji. Modyfikacje sygnału oscylatora są dokonywane zarówno w domenie czasu i częstotliwości (przemiana, modulacja), jak i pod względem amplitudy oraz kształtu (wzmacnianie, tłumienie, kształtowanie impulsów, itd.). Tematyka ta jest niezwykle szeroka, dlatego skupimy się wyłącznie na kilku wybranych aspektach.
Pętle PLL i syntezery częstotliwości
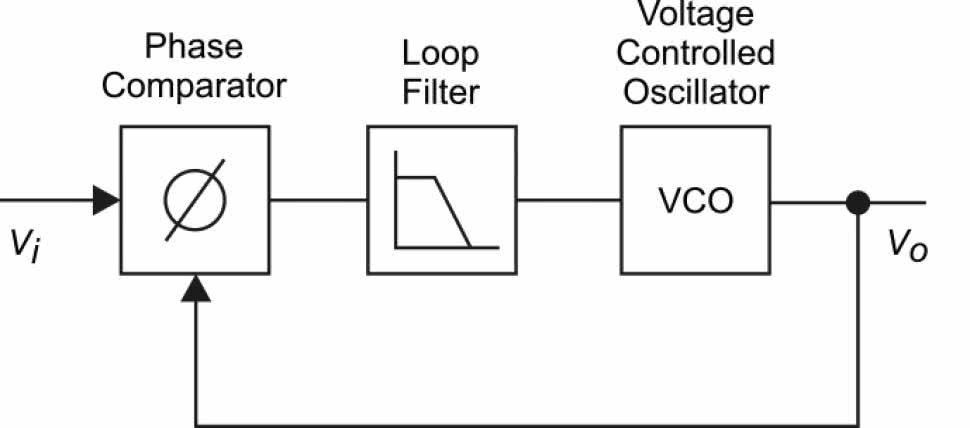
Pętle synchronizacji fazowej (PLL) stanowią fundamentalne narzędzie techniki radiowej oraz… cyfrowej – dziś przynajmniej jedna pętla jest obecna w zdecydowanej większości mikrokontrolerów i procesorów aplikacyjnych, dzięki czemu rdzenie ARM, pracujące przy częstotliwościach taktowania rzędu kilkuset i więcej megaherców, mogą korzystać ze źródeł o relatywnie niskiej częstotliwości (zwykle do około 25 MHz). Podstawowa zasada działania PLL opiera się na regulacji przestrajanego napięciowo oscylatora (VCO) w taki sposób, by jego sygnał wyjściowy (Vo) pozostawał zsynchronizowany fazowo z sygnałem, podanym na wejście pętli (Vi – rysunek 15). Za porównywanie sygnału wejściowego oraz przebiegu wyjściowego oscylatora odpowiada detektor fazy – to właśnie jego sygnał wyjściowy, przefiltrowany dolnoprzepustowo przez tzw. filtr pętli, służy do przestrajania oscylatora.
Rozbudowana teoria, stojąca za funkcjonowaniem pętli PLL, sprawia, że poprawne zaprojektowanie takiego układu od zera jest nie lada wyzwaniem dla konstruktora – konieczne okazuje się zapewnienie szeregu istotnych parametrów, w tym stabilności, czasu ustalania, zakresów częstotliwości roboczych (trzymania i chwytania), szumu fazowego, itd. Na szczęście dziś zadanie to jest znacznie ułatwione dzięki zintegrowanym syntezerom częstotliwości, które, oprócz właściwej pętli PLL, zawierają także szereg wbudowanych obwodów cyfrowych, w tym przede wszystkim dzielników częstotliwości.
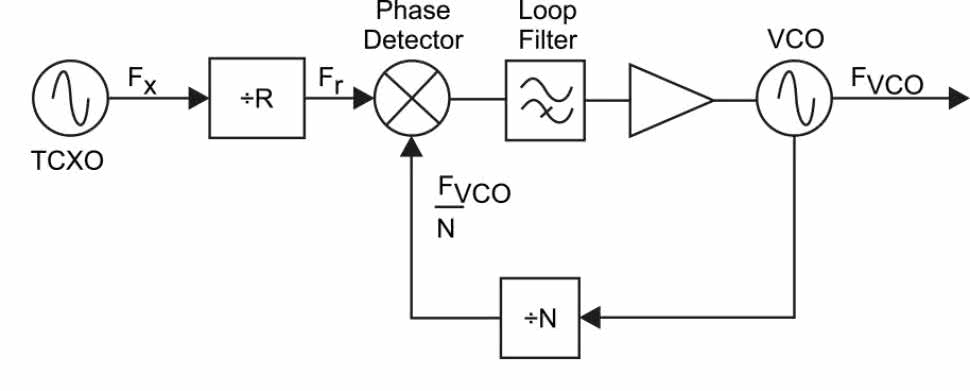
Uproszczony schemat blokowy syntezera częstotliwości typu integer-N (z całkowitym współczynnikiem podziału) został pokazany na rysunku 16. Zasada działania samej pętli PLL jest identyczna, jak opisano wcześniej, różnica polega natomiast na wprowadzeniu dzielników częstotliwości: R na wejściu sygnału odniesienia Fx (w przykładzie jego źródłem jest TCXO) oraz N pomiędzy wyjściem VCO a wejściem detektora fazy. Pętla stabilizuje się w takim punkcie pracy, dla którego sygnały doprowadzone do wejść detektora fazy są nie tylko przesunięte o stały kąt fazowy (np. 0° lub 90°), ale także... identyczne pod względem częstotliwości. Oznacza to zatem, że w stanie synchronizmu zachodzi równanie (1):
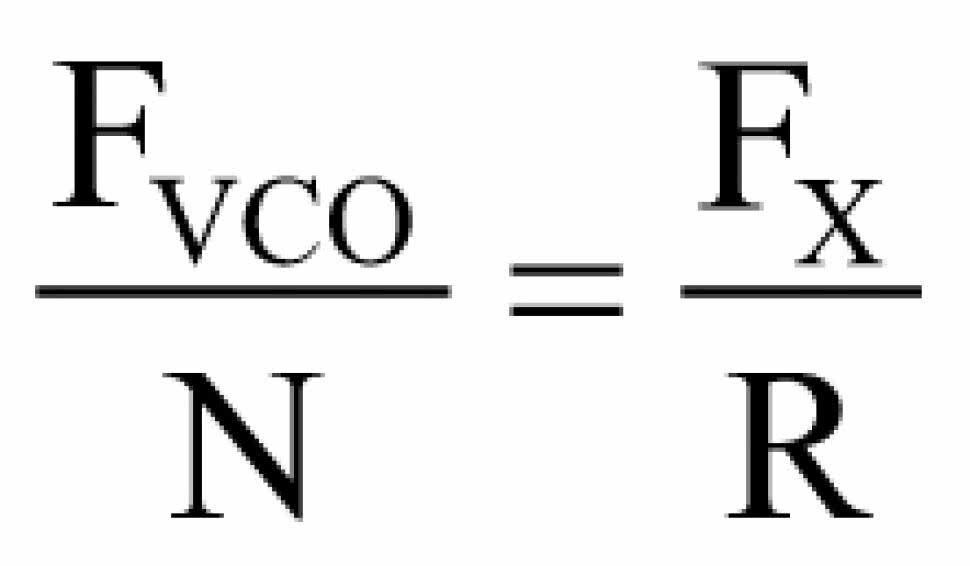
które po przekształceniu algebraicznym prowadzi do wzoru (2):
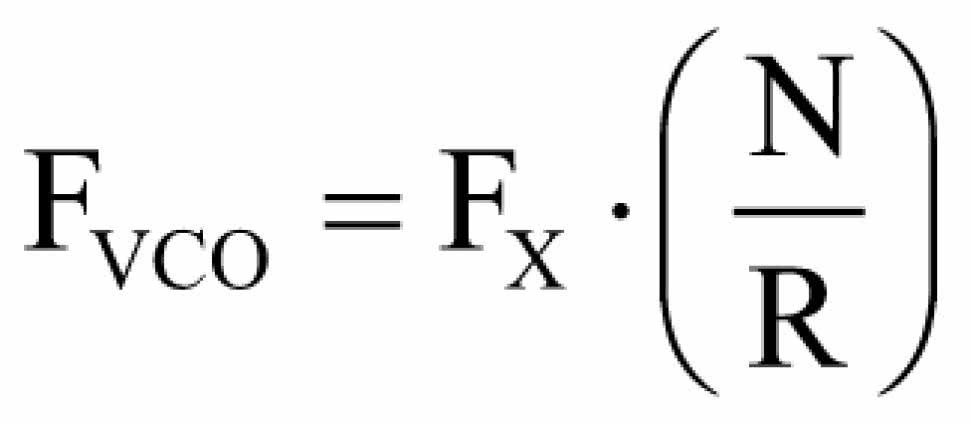
Częstotliwość sygnału wyjściowego VCO może zatem być ustawiona w bardzo szerokim zakresie. Przykładowo syntezer z TCXO o częstotliwości Fx=10 MHz i dzielnikami ustawionymi na: N=50, R=2 osiągnie częstotliwość wyjściową FVCO=250 MHz. Co więcej, częstotliwość tę będzie można przestrajać z krokiem równym 5 MHz (10 MHz/2), zmieniając wartość dzielnika N. Aby poprawić rozdzielczość częstotliwościową, można rzecz jasna zwiększyć stopień podziału N (np. do 500) i nastawę dzielnika R (do 20). W takim przypadku pętla nadal generowałaby częstotliwość podstawową równą 250 MHz, jednak krok przestrajania byłby równy 500 kHz.
Praktyka jak zwykle wymyka się najprostszym, teoretycznym rozważaniom – ograniczenie pojawia się bowiem pod względem szumu fazowego pętli, który rośnie logarytmicznie wraz z mnożnikiem pętli (czyli… dzielnikiem sprzężenia zwrotnego) z szybkością 20log(N). Oznacza to, że zastosowanie wysokich mnożników PLL istotnie degraduje jakość sygnału wyjściowego w domenie widmowej lub – innymi słowy – powoduje „rozmycie” piku widma wyjściowego. Efekt ten jest wysoce niepożądany w wielu aplikacjach, w tym przede wszystkim w zastosowaniach radiowych (mikrofalowych).
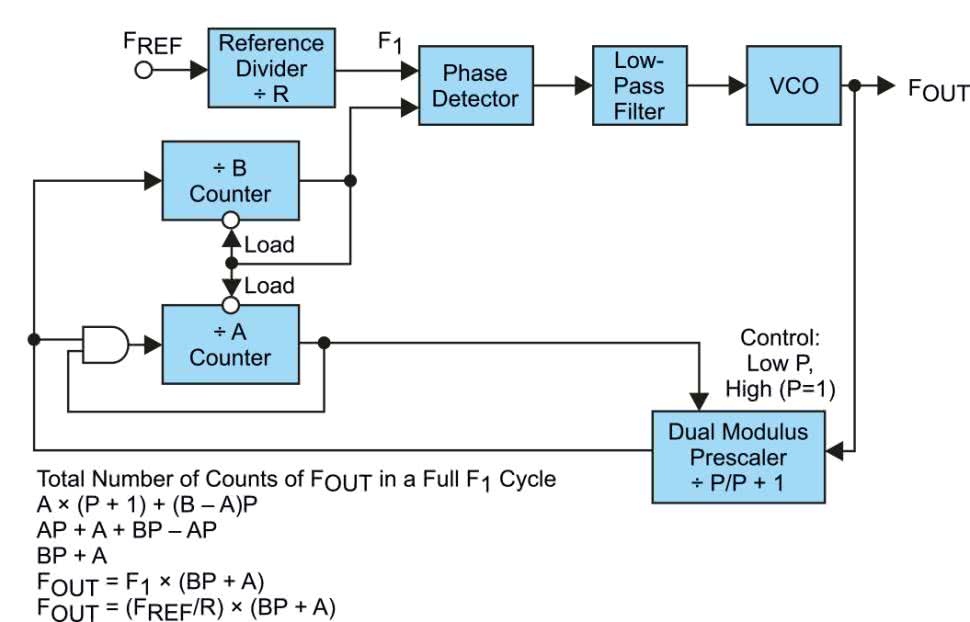
Wyjściem z sytuacji może być zastosowanie syntezera zaprojektowanego w topologii fractional-N, która zgodnie z nazwą umożliwia uzyskiwanie wymiernych (niecałkowitych) współczynników podziału. Rzecz jasna, stworzenie licznika cyfrowego zdolnego do podziału częstotliwości wejściowej np. przez 12,5 byłoby niemożliwe – konieczne zatem okazuje się zastosowanie triku w postaci podwójnego dzielnika, przełączanego co ściśle określoną liczbę cykli sygnału FVCO. Wybór stopnia podziału dzielnika wstępnego (P lub P+1 – rysunek 17) jest dokonywany automatycznie na podstawie nastaw rejestrów konfiguracyjnych syntezera, co pozwala na uzyskanie efektywnego mnożnika pętli równego BP+A.
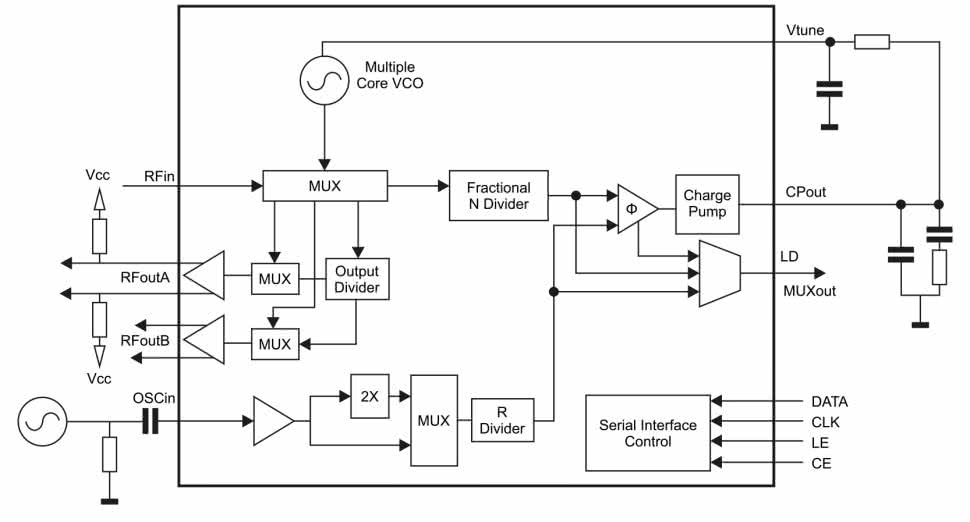
Na koniec ekspresowego przeglądu zasady działania pętli PLL i syntezerów częstotliwości warto przedstawić przynajmniej jeden obrazowy przykład nowoczesnego rozwiązania tego typu. Scalony syntezer fractional-N o oznaczeniu LMX2581 marki Texas Instruments (rysunek 18) integruje w sobie rozbudowaną pętlę PLL z zespołem dzielników, multiplekserów, pompą ładunkową do przestrajania VCO oraz… samym oscylatorem szerokopasmowym o częstotliwości wyjściowej do 3,76 GHz. Potężny układ, który do pracy wymaga zaledwie garstki elementów zewnętrznych (w tym źródła częstotliwości odniesienia, np. TCXO lub OCXO, a także pasywnej sieci pełniącej funkcję filtra pętli), ma wymiary obudowy równe 5,0×5,0 mm i umożliwia wygodne sterowanie za pośrednictwem 3-liniowego interfejsu szeregowego.
Atomowe wzorce częstotliwości
Opisane dotąd wzorce częstotliwości bazowały na zjawisku rezonansu elektromechanicznego płytki kwarcowej lub – w przypadku oscylatorów MEMS – specjalnie zaprojektowanej struktury mechanicznej wykonanej w technologii monolitycznej. Wspólną wadą wszystkich tych rozwiązań jest silna zależność od warunków środowiska, otoczenia układowego, itd. Tymczasem istnieją aplikacje, które do poprawnej pracy wymagają wzorców wręcz „idealnych”, niezależnych m.in. od rozrzutów produkcyjnych. Takie właśnie zalety mają zegary atomowe, czy też innymi słowy, atomowe wzorce częstotliwości, w których generowana częstotliwość wynika wprost z niezmiennych właściwości kwantowych zastosowanego materiału.
Istnieje kilka technologii, różniących się nie tylko zasadą działania, ale także wykorzystywanym do ich budowy pierwiastkiem.
- Masery wodorowe – pojęcie maser można w ogromnym uproszczeniu wytłumaczyć jako „mikrofalowy odpowiednik lasera” – w tym przypadku poprzez wymuszoną emisję dokonuje się wzmocnienia nie wiązki światła, ale mikrofal. Technologia, opracowana w 1960 roku, bazuje na wzbudzaniu atomów wodoru w specjalnej komorze, współpracującej z wnęką mikrofalową, rezonującą z częstotliwością 1,42 GHz (odpowiadającą przejściu atomu wodoru pomiędzy dwoma stanami energetycznymi struktury nadsubtelnej). Częstotliwość ta jest wzmacniania elektronicznie i służy do dalszego pobudzania gazu w komorze. Masery wodorowe są stosowane w (astro)fizyce oraz geolokalizacji satelitarnej, jednak z uwagi na podatność na warunki pracy (temperaturę, pole magnetyczne, czy też zewnętrzne promieniowanie) wymagają solidnych osłon i specjalnych układów regulacji otoczenia, w jakim znajduje się rezonator atomowy. Przykładowo, masery wodorowe zastosowane na pokładzie satelitów systemu Galileo pracują z dokładnością 0,45 ns/12 h.
- Cezowe wzorce częstotliwości – klasyczne konstrukcje wykorzystują wiązkę atomów cezu, generowaną na drodze podgrzewania i rozdzielaną w polu magnetycznym na dwa mniejsze strumienie, różniące się stanem energetycznym. Wiązki są kierowane do komory ze szczeliną, w której działa na nie pole elektromagnetyczne sterowane przez oscylator, zdolny do generowania przebiegów o częstotliwości równej 9,192631770 GHz – przy takiej właśnie częstotliwości w układzie zachodzi rezonans. Atomy trafiają na elektrodę w postaci wolframowego włókna, co powoduje wygenerowanie sygnału elektrycznego – ten zaś po wzmocnieniu jest wykorzystywany do sterowania oscylatorem. Klasyczne zegary cezowe miały całkowitą długość około 1 metra, dziś znane są już konstrukcje wielokrotnie mniejsze i bazujące na technologii Coherent Population Trapping. Zaletą zegarów cezowych jest ogromna dokładność, przez wiele źródeł uznawana za najwyższą wśród konwencjonalnych technologii wzorców atomowych – określa się, że są one zdolne do pracy ze stabilnością 10–18, co oznacza… jedną sekundę na okres porównywalny z szacowanym wiekiem Wszechświata.
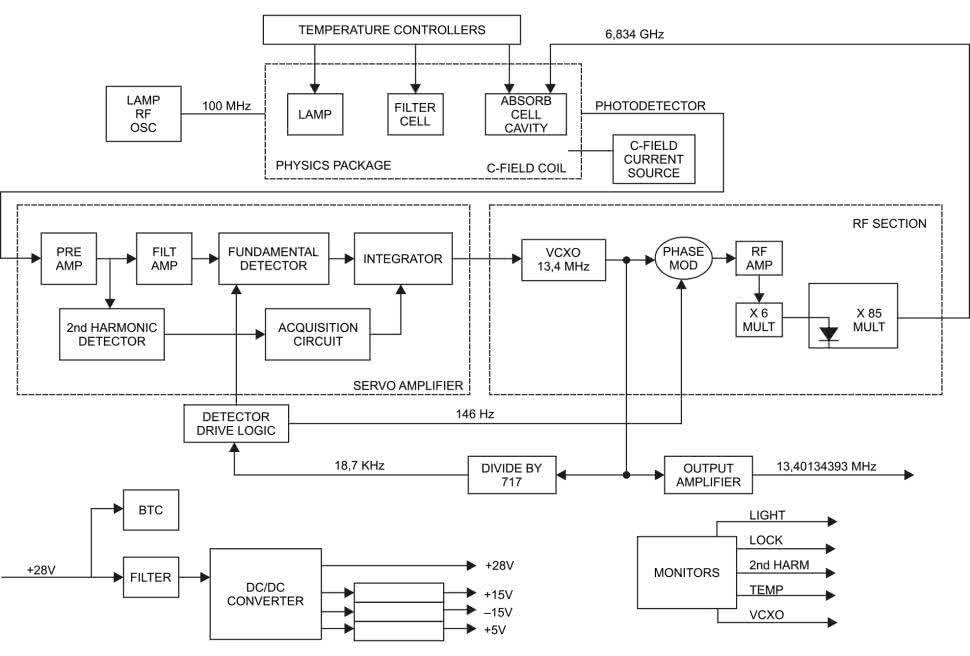
- Zegary rubidowe – klasyczny model budowy wzorców rubidowych opiera się na oscylatorze w postaci szczelnej komory, wypełnionej parami rubidu o wysokiej temperaturze. Do wzbudzenia atomów stosowana jest wyładowcza lampa rubidowa, umieszczona na jednym z końców komory – przy drugim znajduje się fotodetektor, sprzężony ze wzmacniaczem fazoczułym oraz oscylatorem, zdolnym do pracy z częstotliwością 3,417 GHz. Atomy rubidu są cyklicznie pobudzane przez mikrofale, przechodząc do stanu przejściowego, w którym absorpcja światła z lampy wyładowczej jest najsilniejsza. Zastosowanie zamkniętej pętli sprzężenia zwrotnego sprawia, że układ rezonuje na wspomnianej częstotliwości, wynikającej z różnic pomiędzy poszczególnymi poziomami energetycznymi.

Podczas gdy klasyczne konstrukcje z lampą wyładowczą są nadal stosowane w branży kosmicznej, to ich duże wymiary (fotografia 13) oraz bardzo złożona budowa (rysunek 19) sprawiły, że do bardziej „przyziemnych” zastosowań konieczne było znalezienie innych rozwiązań technicznych.
Wzorce rubidowe przeżywają obecnie swój renesans i zyskują popularność dzięki technologii CPT (Coherent Population Trapping) – w tym przypadku do pobudzenia par rubidu wykorzystywana jest miniaturowa struktura lasera półprzewodnikowego typu VCSEL, modulowana przez syntezer mikrofalowy (rysunek 20).
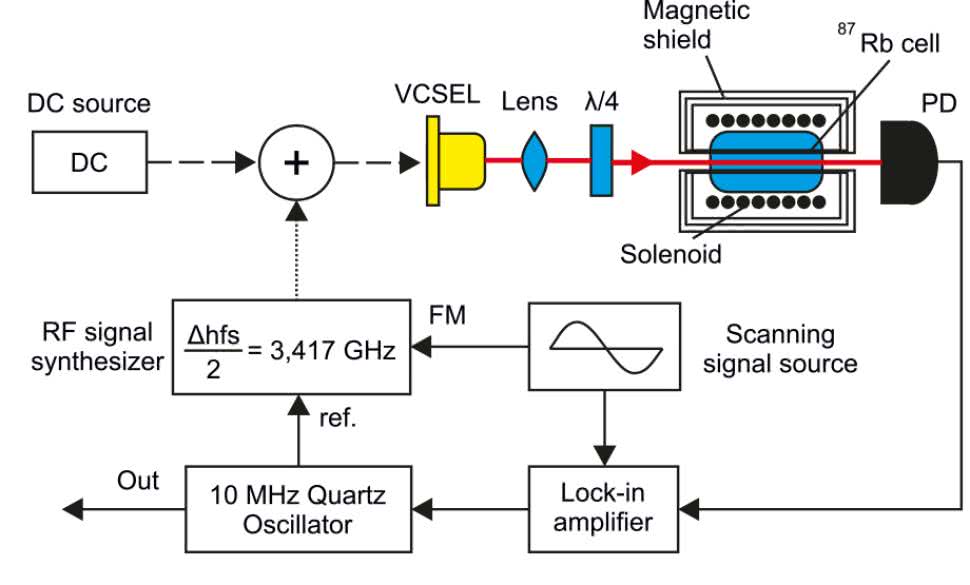
O ile zasada działania serwa (tworzonego przez tor radiowy z wejściem sygnałowym połączonym z fotodiodą) okazuje się niemal identyczna, jak w przypadku klasycznych zegarów rubidowych, o tyle wymiary całości mogą być nieporównanie mniejsze. Dziś wzorce atomowe są oferowane w obudowach do montażu przewlekanego – przykładowo zegar atomowy ICPT-1 (fotografia 14) znanej marki IQD Frequency Products ma wymiary zaledwie 45×36×14,5 mm.
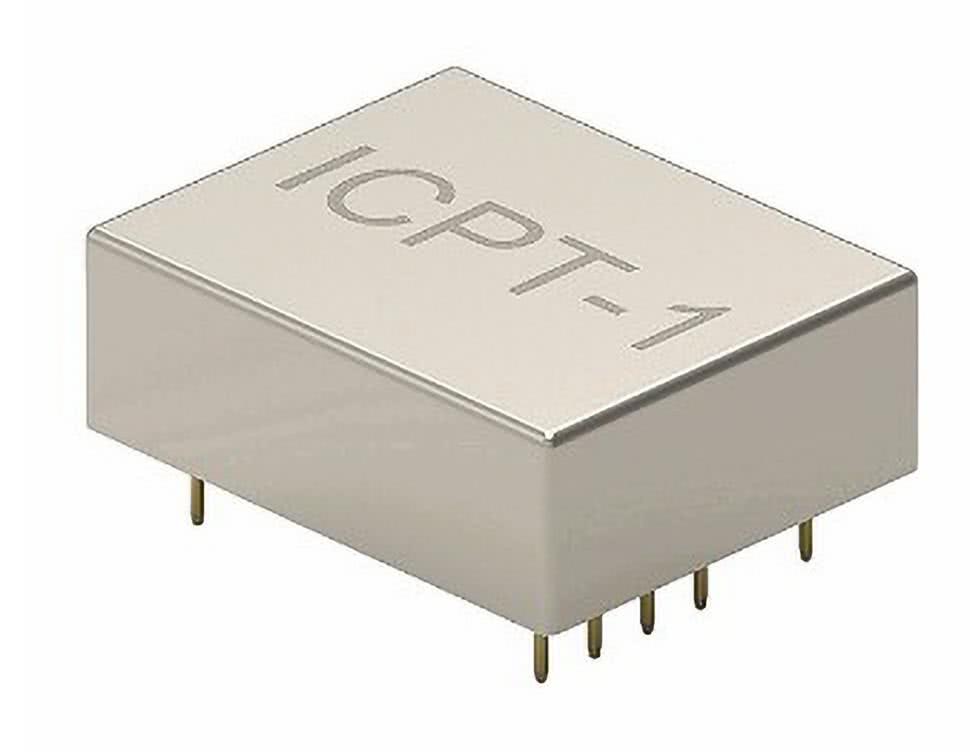
Choć koszty tego typu źródeł są nadal dość wysokie (na poziomie kilku tysięcy euro), to łatwość implementacji i doskonałe osiągi (pozostawiające daleko w tyle nawet najlepsze OCXO) sprawiają, że stają się one niezwykle atrakcyjnym rozwiązaniem do zastosowań nie tylko kosmicznych i wojskowych, ale nawet… przemysłowych czy konsumenckich. Wspomniany model ICPT-1 oferuje stabilność na poziomie ±0,5 ppb i tolerancję wstępną ±0,05 ppb. W ślad za zegarami rubidowymi idą także rozwiązania na bazie cezu – istnieją już zresztą równie małe wzorce cezowe, o konstrukcji pokazanej na rysunku 21.
Warto dodać, że fizycy nie ustają w pracach nad rozwojem nowych metod odmierzania czasu – można trafić m.in. na informacje o superdokładnych zegarach optycznych, intensywnie rozwijanych przez Krajowe Laboratorium FAMO, znajdujące się na Uniwersytecie Mikołaja Kopernika w Toruniu. Inne zespoły (np. National Institute of Standards and Technology) pracują także nad wzorcami na bazie iterbu.
Technologie precyzyjnego odmierzania czasu – źródło lokalne vs synchronizowane
Jednym z najważniejszych zastosowań precyzyjnych wzorców częstotliwości są pomiary czasu w znaczeniu, w jakim pojęcie to rozumie większość społeczeństwa – mowa więc o zegarach jako takich. Dziś zdecydowana większość mikrokontrolerów ma coraz bardziej zaawansowane, wbudowane zegary czasu rzeczywistego (RTC – real time clock). Jako przykład warto podać rodzinę STM32. W starszych mikrokontrolerach STM32 F1 blok RTC przypominał raczej prosty licznik z konfigurowalnym preskalerem niż jakikolwiek zegar w dosłownym tego słowa znaczeniu, a całość obliczeń daty i godziny musiała być wykonywana programowo. Postęp dokonał się jednak i w tej kwestii – nowsze rodziny STM32 (np. STM32 L0) mają wielokrotnie więcej rejestrów, dzięki którym możliwy jest bezpośredni odczyt poszczególnych pól daty i godziny (roku, numerów miesiąca i dnia oraz dnia tygodnia, a także godzin, minut, sekund, a nawet ich ułamków). Nadal jednak dokładność RTC zależy od stabilności i tolerancji produkcyjnej zastosowanego wzorca częstotliwości. Można oczywiście próbować zastosować źródło sygnału o wysokiej stabilności, istnieje jednak też inne podejście – wystarczy raz na pewien czas korygować nastawy, wykorzystując do tego celu zewnętrzne źródło danych nt. czasu.
- Oscylatory z synchronizacją GPS – satelitarne systemy geolokalizacyjne bazują na sygnałach czasu, przesyłanych przez satelity zsynchronizowane dzięki pokładowym, redundantnym zegarom atomowym. Odbiornik GPS (lub inny) wyznacza pozycję na podstawie momentów otrzymania poszczególnych znaczników czasu, wykorzystując zasadę triangulacji. Z tego też względu niezwykle dokładne informacje o aktualnej godzinie są niejako „efektem ubocznym” działania systemów satelitarnych, zatem każde urządzenie z wbudowanym odbiornikiem geolokalizacyjnym może precyzyjnie korygować czas na podstawie odebranych danych.
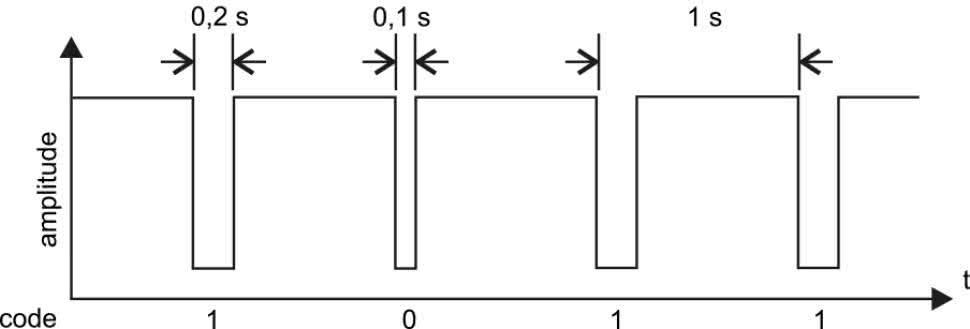
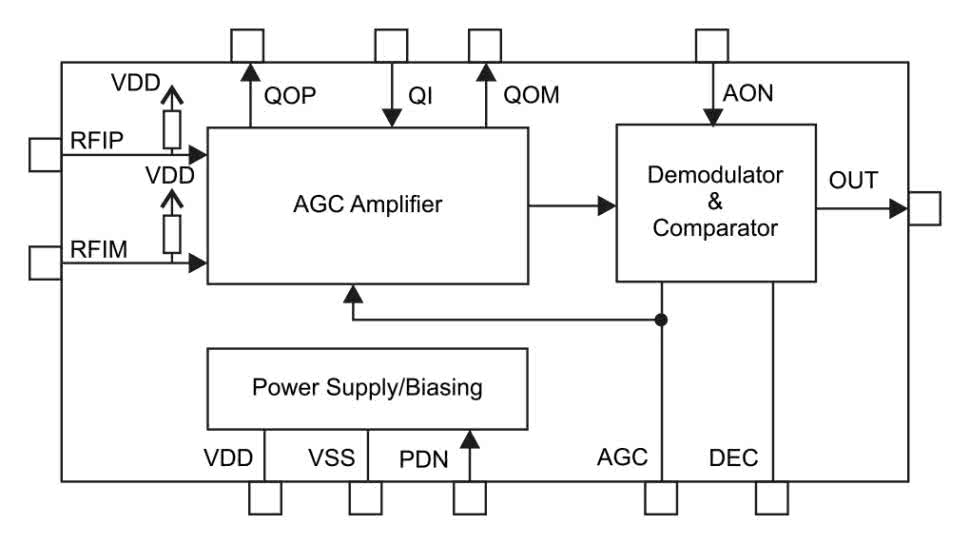
- Synchronizacja sygnałem DCF77 – sygnały radiowe, rozsyłane przez laboratorium Physikalisch-Technische Bundesanstalt w Brunszwiku za pomocą 50-kilowatowego nadajnika AM, są generowane na podstawie sygnału ze znajdującego się tam atomowego wzorca cezowego i niosą informacje na temat daty, godziny, czasu letniego lub zimowego, a nawet… prognozy pogody czy też ważnych dla ludności alertów dot. obrony cywilnej oraz katastrof. Ramka sygnału DCF77 składa się z 59 bitów, przesyłanych z prędkością 1 bit/s na częstotliwości nośnej 77,5 kHz. Spadek amplitudy na czas 0,2 s oznacza bit „1”, zaś spadek 100-milisekundowy – bit „0” (rysunek 22). Do odbioru danych z nadajnika w Niemczech może być używany prosty odbiornik AM, np. MAS6180C (rysunek 23), obecny w popularnych modułach wyposażonych w antenę ferrytową.
- Serwery czasu NTP – protokół synchronizacji czasu NTP (Network Time Protocol) został opracowany jeszcze w 1985 roku i od tamtej pory pozostaje w ciągłym użyciu. Pozwala na automatyczną synchronizację czasu przez systemy operacyjne (Windows Time w przypadku systemów giganta z Redmond, SNTP w aplikacjach embedded, systemach linuksowych, itd.). Dość prosty algorytm działania doskonale radzi sobie z kompensacją opóźnień w transmisji poszczególnych pakietów – klient wysyła do serwera NTP zapytanie o aktualny czas i czeka na odpowiedź. Serwer odsyła ją z informacją o momencie odbioru zapytania i wysłania odpowiedzi. Po stronie klienta możliwe jest zatem obliczenie nie tylko opóźnienia transmisyjnego, ale także różnicy, o jaką należy skorygować czas lokalnego zegara.
Podsumowanie
W artykule staraliśmy się możliwie wyczerpująco omówić tematykę wzorców czasu i częstotliwości. Jak widać, najbardziej rozpowszechnione są obecnie rozwiązania bazujące na starym, dobrym rezonatorze kwarcowym, pomimo że i ten zaczyna być powoli wypierany przez nowocześniejsze oscylatory MEMS. I choć w sprzedaży dostępne już są oscylatory skompensowane (TCXO) i stabilizowane aktywnie (OCXO) o doskonałych parametrach, czasem nadal niepodzielnie rządzą zegary atomowe. Fizyka nie ustępuje pola inżynierom i nadal pozostaje „autorką” najbardziej stabilnych wzorców częstotliwości – dlatego też w najbliższych latach możemy spodziewać się dalszej miniaturyzacji zegarów atomowych i zapewne w miarę upływu lat ich ceny spadną do poziomu obecnych OCXO.
inż. Przemysław Musz, EP