 Zaloguj
Zaloguj



Oczywiście, takiego napędu nie da się zrobić w oderwaniu od praw fizyki i zapewne, jeśli zależy nam na dokładności tego ruchu, trzeba będzie wykonać rodzaj sprzężenia zwrotnego, które poinformuje układ sterujący czy ruch na pewno nastąpił, czy może silnik oscyluje i nie jest w stanie przezwyciężyć obciążenia. Zwykle w funkcji takiego sprzężenia stosuje się enkoder inkrementalny, który jest sprzęgany z osią silnika lub ma rolkę zamieniającą liniowy ruch obiektu na obrotowy osi enkodera.
Większość aplikacji silników krokowych wykorzystuje fakt, że liczba kroków (skoków) przypadających na jeden pełny obrót jest znana i wynika z budowy silnika. Znając do tego przełożenie przekładni połączonej z osią silnika łatwo zamienić taki pojedynczy skok na odpowiadające mu przemieszczenie liniowe, a mając podaną wielkość przemieszczenia w jednostkach miary zamienić je liczbę skoków, wysłać do silnika odpowiadającą mu liczbę sekwencji i już mamy gotowy ploter, frezarkę CNC, drukarkę i wiele innych urządzeń, z których istnienia często nie zdajemy sobie sprawy. Bo na przykład, ilu z użytkowników samochodów wie, że oprócz silnika spalinowego ma „pod maską” szereg silników krokowych napędzających różne przesłony i dźwignie?
Sterowanie silnikiem krokowym na poziomie podstawowym nie jest specjalnie skomplikowane. W najprostszych sterownikach silników zwykle mamy do czynienia albo ze sterowaniem bezpośrednim, albo z tzw. półkrokrokowym, w którym skok podstawowy jest dzielony przez 2. W nieco bardziej rozbudowanych można uzyskać sterowanie mikrokrokowe, w którym skok podstawowy jest dzielony przez pewną liczbę całkowitą – najczęściej z zakresu od 3 do 32. Teoretycznie istnieje również możliwość uzyskania podziału niecałkowitego, ale raczej nie ma to zastosowania praktycznego. Ten rodzaj sterowania wymaga jednak modulacji PWM.
Kiedy silnik krokowy jest sterowany w sposób pełno- lub półkrokowy, pole magnetyczne stojana obraca się odpowiednio o 90° lub 45° elektrycznych na każdy skok silnika. Wytwarzanie takiego pola jest stosunkowo łatwe, ponieważ wymagane są tylko dwa poziomy prądu: znamionowy oraz wyłączony. Można je łatwo uzyskać za pomocą dowolnego układu sterującego. Włączając lub wyłączając prądy uzwojeń można uzyskać 8 różnych kombinacji prądów w uzwojeniach oraz odpowiadające im 8 położeń pola magnetycznego w silniku. Jeśli jest dostępny sterownik, który może wytworzyć dowolny prąd uzwojenia, na poziomie od 0 do 141% prądu nominalnego, to jest możliwe wytworzenie wirującego pola magnetycznego o dowolnej orientacji, a zatem wybranie dowolnego kąta elektrycznego skoku, na przykład: 1/4, 1/8 lub 1/32. Oprócz zmiany kierunku pola magnetycznego można również zmieniać jego natężenie, co pozwala na gładki ruch rotora przy małej częstotliwości. Przy częstotliwości 2 lub 3 razy większej niż częstotliwość podstawowa, praca mikrokrokowa ma niewielki wpływ na drgania rotora, ponieważ bezwładność mechaniczna rotora działa jak filtr dolnoprzepustowy.
Jak wszystko, praca z mikrokrokiem ma też swoje wady. Często w praktyce albo nie da się stosować dużego podziału kroku podstawowego, albo trzeba stosować silnik o większej mocy, niż byłaby wymagana przy sterowaniu bez podziału. Chociaż układ elektroniczny służący do pracy z mikrokrokiem jest bardziej złożony niż w przypadku pełnego kroku czy półkroku, całkowita złożoność systemu wraz z silnikiem, przekładnią i elementami przenoszenia napędu jest mniejsza.
Podstawowe lub półkrokowe sterowanie silnikiem krokowym wymaga zasilenia jego uzwojeń pewną sekwencją napięć, których liczba zależy od budowy silnika. Najwygodniej taką sekwencję tworzyć za pomocą maszyny stanów zmieniającej się w takt wejściowych impulsów zegarowych. Licząc te impulsy można łatwo zamienić je na odpowiadające im przemieszczenie liniowe. Mając do dyspozycji mikrokontroler można wykonać sprzężenie zwrotne dołączając do niego enkoder. Mikrokontroler da też możliwość łatwego wykonania programowej maszyny stanów, sterowania mikrokrokowego, regulowania prądu uzwojeń silnika za pomocą PWM, pomiaru tego prądu, obliczania jego rzeczywistej wartości skutecznej, wykonania graficznego interfejsu użytkownika, komunikacji sieciowej i innych funkcji, dla których ograniczeniem jest jedynie wyobraźnia. Jednak proszę mi wierzyć, ponieważ autor artykułu zmierzył się w przeszłości z opracowywaniem takich sterowników, że nie jest to zadanie łatwe i wymaga solidnej wiedzy nie tylko z zakresu oprogramowania i funkcjonowania mikrokontrolera, ale również komutacji, obniżania poziomu emitowanych zaburzeń EMI, redukowania ich wpływu na układ sterowania, chłodzenia podzespołów i wielu innych. A później trzeba to wszystko jakoś upakować i opakować, dodać pewne i solidne złącza, dopasować do obowiązujących standardów.
Troszkę się zagalopowałem. Nie każda aplikacja jest aż taka trudna i wymagająca – niekiedy wystarczy po prostu wprawić silnik w ruch. W takich zastosowaniach dobrze sprawdzą się najprostsze sterowniki, dawniej realizowane za pomocą układów dyskretnych TTL lub CMOS, a współcześnie z użyciem tanich mikrokontrolerów. Liczne projekty takich sterowników były publikowane w Elektronice Praktycznej, a wśród nich dwa, które są bestsellerami sprzedaży naszych zestawów do samodzielnego montażu.
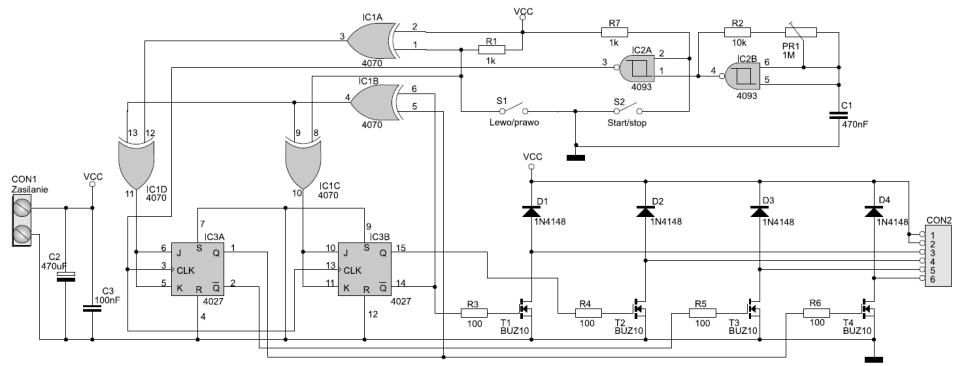
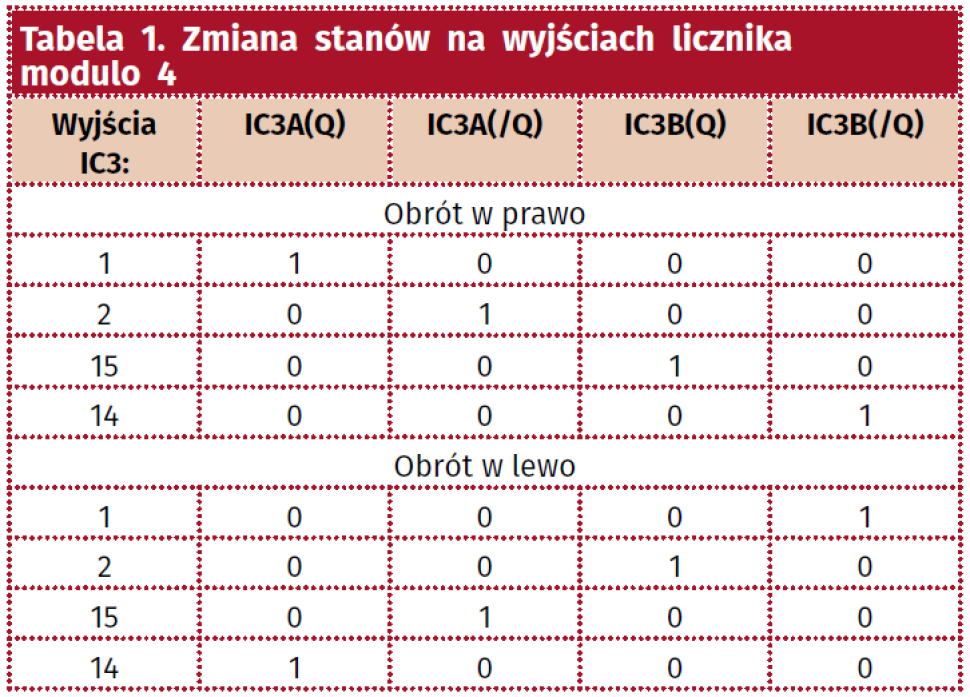
Schemat elektryczny sterownika silnika krokowego AVT1314, którego opis był opublikowany w EP 8/2001, pokazano na rysunku 1. Wykonano go w całości z elementów dyskretnych – na próżno szukać w nim procesora lub układów specjalizowanych. Składa się on z generatora przebiegu taktującego zrealizowanego na bramce Schmitta (IC3B). Częstotliwość pracy tego generatora, a tym samym prędkość obrotowa silnika, są określone wartością rezystancji R2+PR1 i pojemnością kondensatora C1, i może być regulowana w szerokim zakresie za pomocą potencjometru montażowego PR1. Kolejny blok sterownika tworzy fragment schematu z bramkami EXOR i przerzutnikami J-K. Za ich pomocą wykonano licznik modulo 4, na którego wyjściach w takt impulsów zegarowych jest przesuwany poziom wysoki, jak opisano w tabeli 1. Przełącznik S1 służy do zmiany kierunku pracy licznika, a tym samym do zmiany kierunku obrotów silnika, którego cewki przełączane są zgodnie ze stanami na wyjściu licznika. Za pomocą przełącznika S2 możemy zatrzymywać lub uruchamiać silnik. Cewki czterofazowego silnika krokowego zasilane są za pośrednictwem tranzystorów T1...T4. Zastosowanie w układzie modelowym tranzystorów dużej mocy typu BUZ10 jest rozwiązaniem gwarantującym poprawną pracę nawet silników o bardzo dużej mocy.
Opis sterownika AVT1725 ukazał się 12 lat później. Jak większość współczesnych urządzeń, zrealizowano go z użyciem mikrokontrolera, co wpłynęło na jego funkcjonalność. Oprócz znacznego uproszczenia budowy, uzyskano możliwość sterowania mikrokrokowego, które odbywa się z rozdzielczością 1/64 lub 1/8 kroku. Dodatkowo wyposażono go w funkcję pracy czasowej (czas regulowany płynnie w zakresie 0,5...70 s). Zaimplementowano też możliwość wyłączenia zasilania uzwojeń silnika po zatrzymaniu – w ten sposób silnik może hamować lub obracać się swobodnie po zatrzymaniu (autor projektu nazwał te tryby zatrzymaniem statycznym lub dynamicznym).
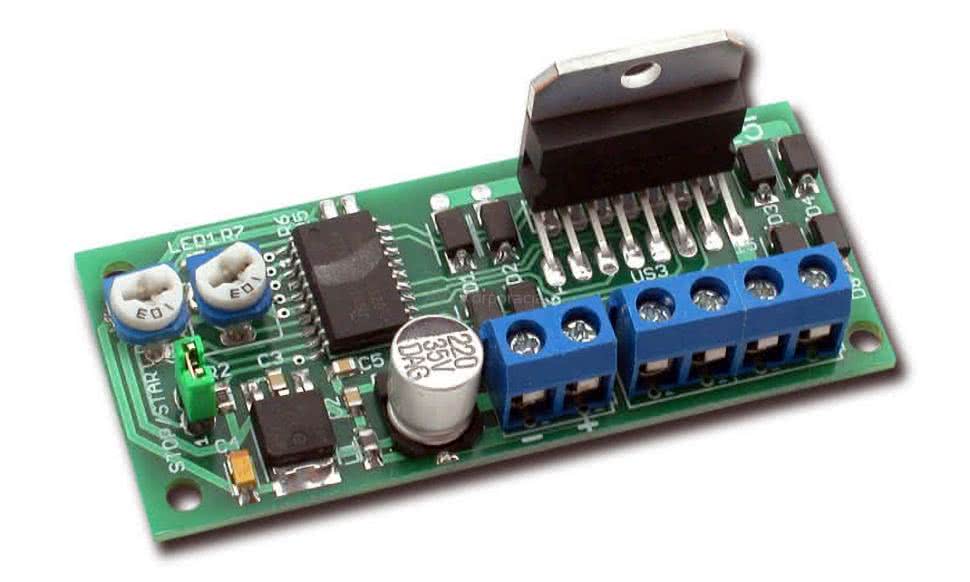
Schemat ideowy sterownika AVT1725 pokazano na rysunku 2. Stopień mocy zrealizowano na układzie scalonym L298. Jego pracą steruje mikrokontroler ATtiny26, a zasilania dostarcza stabilizator 78M05. Sekwencje pośrednie uzyskiwane są poprzez sterowanie uzwojeniami silnika przebiegiem PWM. Charakterystyka modulacji PWM ma kształt przebiegu trójkątnego. Takie rozwiązanie jest nieskomplikowane i skuteczne, ale w sterownikach profesjonalnych jest stosowany kształt sinusoidalny.
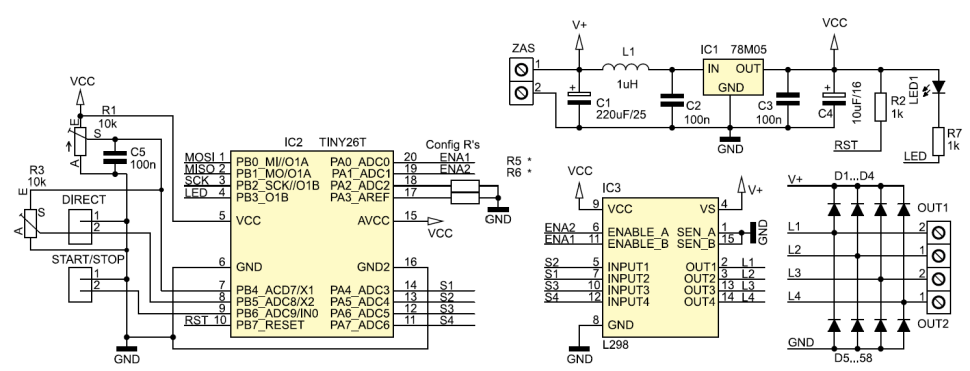
Rezystor R5 służy do wyboru zakresu prędkości obrotowej. Jeśli jest zamontowany, to jest wybrana wyższa częstotliwość sekwencji, ok. 7...100 cykli na sekundę (czyli pełnych okresów przebiegu w każdym kanale), a sterownik pracuje z mniejszą rozdzielczością 1/8 kroku. Brak rezystora R5 oznacza mniejszą częstotliwość 1...10 cykli na sekundę oraz wyższą rozdzielczość mikrokrokową 1/64. Rezystor R6 określa czy silnik w czasie zatrzymania będzie miał odłączone zasilanie (R6 = hamowanie). Sterownik ma też funkcję pracy czasowej. Jej załączenie następuje po zwarciu złącza START/STOP, a czas załączenia ustala położenie suwaka potencjometru R1. Potencjometr R3 służy do regulacji kierunku i prędkości obrotowej – w środkowym położeniu silnik jest zatrzymany, przesuwanie potencjometru powoduje stopniowe zwiększanie prędkości obrotowej. Można nie montować potencjometru R3, zamiast tego do złącza DIRECT podawać napięcie z przedziału 0...5 V i w ten sposób sterować pracą silnika.
Jacek Bogusz, EP












