 Zaloguj
Zaloguj




W artykule wyjaśniono, w jaki sposób płytka została zaprojektowana, uzasadniono podjęte decyzje projektowe i wskazano, jak płytka odpowiada na różne wymagania poszczególnych aplikacji. Takie gotowe rozwiązanie referencyjne pomaga inżynierom szybciej rozpocząć własne prace projektowe i skrócić czas potrzebny na wprowadzenie na rynek gotowych, dobrze przemyślanych rozwiązań, ograniczając wysiłki wkładane w projektowanie i weryfikację.
Bezszczotkowe silniki stałoprądowe
Silniki stałoprądowe znane są już od czasów Michaela Faradaya, Josepha Henry’ego i Andrew Gordona, a więc od lat 40. XVIII wieku, kiedy to zademonstrowano, że prąd przepływający przez przewód w polu magnetycznym powoduje powstawanie siły. Pomimo tych wczesnych badań, dopiero w latach 80. XIX wieku silniki tego typu weszły do komercyjnego użycia. Pierwsze z silników miały szczotki. To dlatego, że konieczne jest by co 180° odwracać polaryzację prądów, aby wirnik obracał się cały czas w tę samą stronę. Szczotki utrzymują kontakt z rozdzielonym komutatorem, co pozwala właśnie na zmianę kierunku przepływu prądu wewnątrz przewodnika (rysunek 1).
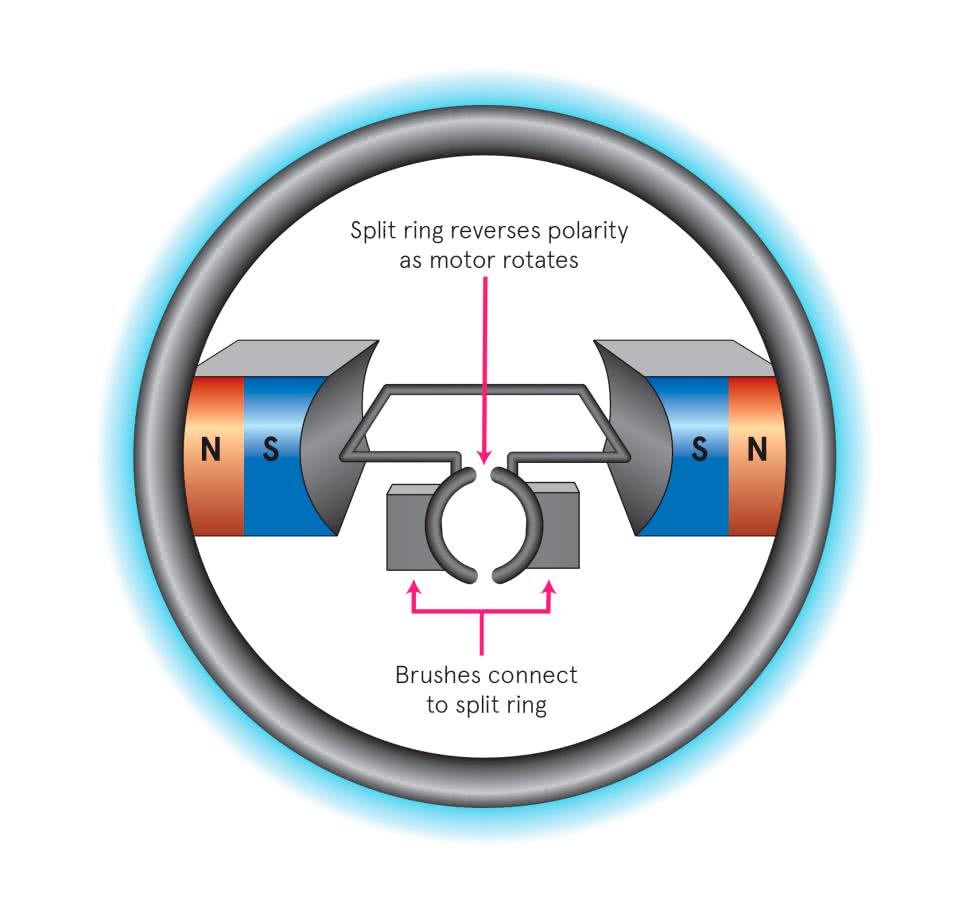
Kontakt mechaniczny jest realizowany z użyciem szczotek, ale to znowu sprawia, że generowane są duże ilości zakłóceń elektromagnetycznych (EMI) oraz powstaje iskrzenie. Żywotność silnika spada ze względu na stopniowe ścieranie się szczotek i samego komutatora.
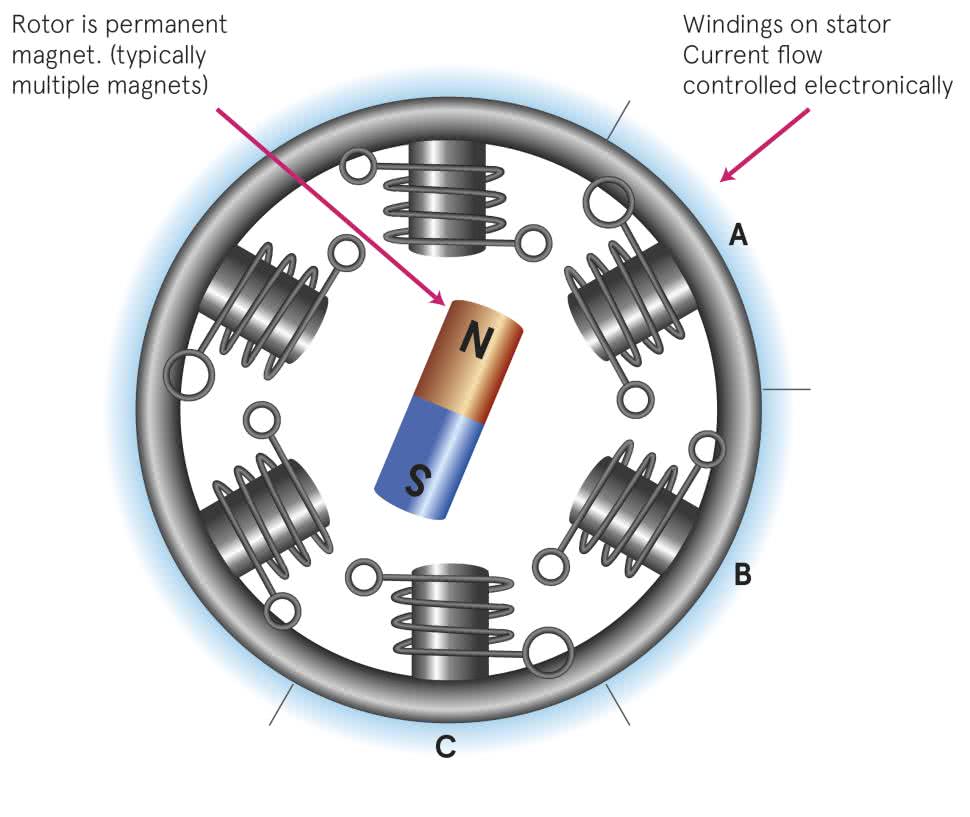
W 1962 roku, opracowanie technologii układów półprzewodnikowych pozwoliło T.G Wilsonowi i P.H. Trickey’owi na zbudowanie pierwszego bezszczotkowego silnika stałoprądowego, w którym komutator został zastąpiony obwodem elektronicznym, eliminując tym samym wady szczotek i pozwalając na uzyskanie wyższego stosunku momentu do masy, a zarazem na zwiększoną sprawność silników. W silnikach BLDC wirnik ma magnesy stałe, a stator zawiera elektromagnesy, których polaryzację zmienia się elektronicznie, by napędzać wirnik (rysunek 2). Silniki BLDC można budować w wersjach jednofazowych, dwufazowych i trójfazowych, z czego ta ostatnia jest najbardziej popularna. Dziś bezszczotkowe silniki stałoprądowe to preferowana technologia, ponieważ pozwala poprawić wydajność wszelkiego rodzaju urządzeń, począwszy od twardych dysków komputerowych i robotów przemysłowych, a kończąc na pojazdach elektrycznych i wentylatorach.
Sterowanie silnikami BLDC
Jako że komutacja jest sterowana elektronicznie, konieczne jest zapewnienie jakiegoś sposobu monitorowania pozycji wirnika. Tradycyjnie było to realizowane za pomocą czujnika Halla, ale jeśli pozycja kątowa wirnika jest znana z większą dokładnością, sterowanie staje się bardziej precyzyjne. Alternatywą jest pomiar prądu płynącego przez każde z uzwojeń, do czego używa się odpowiednich boczników. Aby mieć pewność, że przygotowana płytka demonstracyjna znajdzie zastosowanie w tak wielu różnych aplikacjach, jak to tylko możliwe, firma Renesas zdecydowała się zaimplementować rezystory bocznikujące oraz zamontować czujnik pozycji, dzięki któremu możliwe będzie testowanie projektów wymagających większej precyzji pomiaru.
Istnieje wiele różnych algorytmów sterowania silnikami BLDC. Nowoczesne aplikacje wykorzystują zwykle fale sinusoidalne do napędzania silnika, gdyż pozwala to uzyskać większą wydajność, zapewnić gładkie zmiany momentów siły, a ponadto takie przebiegi prowadzą do bardziej precyzyjnego ruchu przy niskich prędkościach, niż fale trapezoidalne (PWM). Jeśli korzysta się właśnie z fal sinusoidalnych i obliczeń kąta z użyciem czujników pozycji, wymagania co do wydajności zainstalowanego mikrokontrolera znacząco rosną.
Wybór silnika i tranzystorów MOSFET
Kluczowym komponentem takiego systemu jest oczywiście silnik i to on zazwyczaj jest pierwszym elementem, od którego zaczyna się wybór. Ustalane kryteria obejmują dostępne napięcie, oczekiwaną prędkość obrotową, moment siły i moc, choć znaczenie mają także czynniki takie jak np. rozmiary. Dziś większość silników BLDC budowana jest w konfiguracji trójfazowej.
Na płytce od Renesas zainstalowano 24-woltowy silnik. Przy zasilaniu napięciem 24 V, gdy wirnik zatrzyma się z pełnej prędkości, powstanie wsteczny impuls EMF o napięciu 24 V, a więc tranzystory MOSFET używane do napędzania silnika muszą wytrzymywać przynajmniej 48 V. Tranzystory te muszą też móc dostarczać chwilowe prądy, znacznie wyższe niż przeciętne prądy znamionowe. Tranzystor mocy MOSFET – model RJK0651DBP idealnie sprawdza się w tej aplikacji ze względu na napięcie znamionowe 60 V i prąd znamionowy 25 A – istotnie większy niż potrzeba do wybranego silnika.
Mikrokontroler nie jest w stanie dostarczać zasilania do silnika bezpośrednio, dlatego wybrano układy HIP2211 w konfiguracji pół-mostka. To dosyć uniwersalne komponenty, mogące pracować z zasilaniem z zakresu od 6 V do 18 V, a ponadto mają zintegrowaną diodę podciągającą.
Wybór mikrokontrolera
Wzorcowa płytka pozwala na określanie pozycji wirnika za pomocą rezystorów bocznikujących lub indukcyjnego czujnika pozycji. Oznacza to, że mikrokontroler musi mieć trzy przetworniki analogowo-cyfrowe z funkcjami próbkowania i zapamiętywania pozyskanego wskazania. Mikrokontroler użyty w takiej aplikacji musi także cechować się dobrą wydajnością, szczególnie w odniesieniu do obliczeń potrzebnych do określania pozycji kątowej wirnika. To z powyższego powodu projektanci zdecydowali się na użycie MCU z jednostką zmiennoprzecinkową.
Większość nowoczesnych mikrokontrolerów pracuje z napięciem 3,3 V, ale w środowisku z dużą ilością szumów może to stanowić wadę. Aby zapewnić niezawodne działanie, projektanci zdecydowali się wybrać mikrokontroler zasilany napięciem 5 V. Rodzina RX13T spełniła pokładane wymagania, a ponadto została zaprojektowana specjalnie z myślą o aplikacjach sterowania silnikami. Produkty dostępne są w kilku obudowach, z 12 kB pamięci RAM i wyborem 64 kB lub 128 kB pamięci programu. Ze względu na zastosowanie mikrokontrolera do aplikacji wzorcowej, wybrano model z dużą ilością pamięci, dzięki czemu uda się uniknąć wszelkich ograniczeń implementowanego algorytmu.
Płytka dostarczana jest z oprogramowaniem sterującym silnikiem. Można je skonfigurować do pracy zarówno z rezystorami bocznikującymi, jak i z indukcyjnym czujnikiem pozycji. Kod źródłowy oprogramowania też dostarczany wraz z płytką, dzięki czemu programiści mogą samodzielnie zoptymalizować algorytmy, skracając czas własnych prac.
Detekcja pozycji
O ile pierwsze silniki BLDC korzystały z bardzo popularnych czujników Halla by monitorować położenie wirnika, istnieją inne sposoby pozyskiwania tych informacji. Oprócz rezystorów za pomocą których mierzy się przepływający prąd, na płytce zainstalowano także indukcyjny czujnik pozycji IPS2200. Jego użycie skutkuje bardzo znaczącym poprawieniem dokładności monitorowania pozycji, względem użycia czujników Halla. Zamiast precyzji na poziomie 1/3 obrotu, IPS2200 pozwala na uzyskanie dokładności do 0,5°, w całym zakresie obrotowym. Czujnik pozwala na określenie pozycji absolutnej wirnika, podczas gdy układ obliczający o ile względnie dobrze (choć nie aż tak) radzi sobie z pozycjonowaniem w ruchu, będzie miał problemy z podaniem wartości absolutnej bez wskazania punktu odniesienia.
Zasilanie
Projektanci płytki zdecydowali się użyć 24-woltowego zasilacza z 5-milimetrowym złączem typu Jack. Oznacza to, że w razie potrzeby z łatwością można znaleźć zasilacz zastępczy. O ile reszta projektu pozwala na dostarczenie większej ilości mocy, wybór standardowego rodzaju złącza zasilania ograniczył maksymalny prąd do 4 A, zmniejszając tym samym maksymalną dopuszczalną moc systemu. Zostało to podyktowane przemyśleniem, że korzyści płynące z łatwego do zastąpienia zasilacza przewyższają zalety użycia większych silników, gdyż cała płytka prototypowa nie odnosi się do żadnego konkretnego rozmiaru silnika.
24-woltowe napięcie pozwala na zasilanie silnika bezpośrednio. Natomiast elektronika – tranzystory MOSFET – potrzebują zasilania o napięciu z zakresu od 6 V do 14 V. Jest to realizowane za pomocą układu ISL85413, który generuje napięcie 10 V. ISL85413 to uniwersalna, synchroniczna przetwornica obniżająca, generująca do 300 mA prądu przy zachowaniu wysokiej sprawności. Szczególnie łatwo ją użyć w aplikacji, gdyż wymaga jedynie kilku zewnętrznych komponentów i dzięki temu idealnie sprawdza się w takich płytkach demonstracyjnych, jak opisywana.
Tak jak omówiono powyżej, wybrano mikrokontroler zasilany napięciem 5 V by zwiększyć margines odporności na szumy i poprawić niezawodność systemu. Jako że sam mikrokontroler nie wymaga dużej ilości prądu, zdecydowano się na użycie regulatora LDO – model ISL80410, zasilanego bezpośrednio z 10 V. W ten sposób zapewnione jest niezawodne zasilanie dla MCU.
Pozostałe decyzje podejmowane podczas projektowania
Na płytce zastosowano również port USB, by móc podłączyć komputer PC celem zbierania danych i sterowania silnikiem. Sam wybrany mikrokontroler nie ma interfejsu USB, dlatego konieczne stało się dodanie kolejnego podzespołu – wybór padł na mikrokontroler RL78/G1C. Zastosowanie oddzielnego podzespołu do łącza USB oznacza, że projektanci mogą użyć optoizolatora by ochronić komputer PC przed ewentualnymi awariami płytki. To niezwykle ważna kwestia, szczególnie jeśli elektronika mocy na płytce jest używana w trakcie prac rozwojowych.
Czterowarstwowa płytka drukowana została wybrana by uzyskać dobry kompromis pomiędzy rozmiarem i kosztem. Komponenty umieszczone tylko na jednej stronie pozwoliły zmniejszyć koszty montażu. Warto zwrócić uwagę, że wybrane rodzaje obudów zostały wskazane m.in. z uwagi na rozmiar docelowy PCB.
Kompletny system
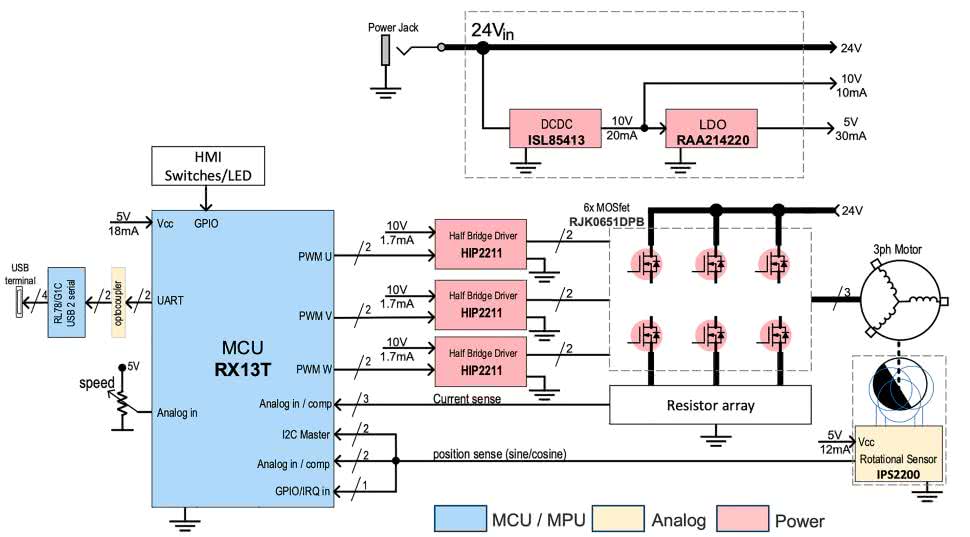
Schemat blokowy całego systemu został pokazany na rysunku 3, a wygląd płytki pokazuje fotografia tytułowa. W praktyce płytka okazała się cennym i elastycznym narzędziem, pomagającym inżynierom pracującym nad różnymi aplikacjami, począwszy od systemów sterowania do symulatorów jazdy i lotów, a kończąc na narzędziach mocy i zrobotyzowanych kosiarkach. We wszystkich tych obszarach, płytka pozwala na opracowywanie wysoce sprawnych systemów sterowania silnikami bezszczotkowymi.
Chociaż kompromisy przy doborze komponentów w ich zastosowaniach mogą się różnić od kompromisów podejmowanych na etapie sprawdzenia koncepcji, podstawowe decyzje projektowe pozostają takie same. Dostarczając dobrze przemyślane rozwiązanie, Renesas pomógł klientom skrócić ich czas wdrażania produktów na rynek i dał im pewność, że mogą przygotować sprawne i efektywne rozwiązanie dla wyzwań sterowania silnikami, przed jakimi stają.
Simon Meadmore
Global Head of Supplier and Product Management w firmie Farnell












