 Zaloguj
Zaloguj




- Napięcie zasilania: 7...9 V
- Prąd obciążenia: 100 mA
- Źródło napięcia podtrzymania zegara RTC: bateria CR1220
- Prąd podtrzymania zegara RTC: 1 μA
- Zakres pomiarowy wbudowanego termometru: 0...55°C
- Dokładność pomiaru temperatury: 0,5°C
- Rozdzielczość pomiaru temperatury: 0,5/0,1°C (w zależności od rodzaju zastosowanego termometru scalonego)
Z jednej strony chciałem, by odznaczało się ono dużą prostotą implementacji oraz nieskomplikowaną obsługą, a z drugiej strony – efektownym i nowoczesnym interfejsem użytkownika. Nie ukrywam, że inspiracją do powstania niniejszego projektu był zakupiony przeze mnie na chińskim portalu sprzedażowym prosty zegar biurkowy, wyposażony w bardzo efektowny, graficzny wyświetlacz VFD. Dodajmy: bardzo efektowny, ale niewielki, gdyż konstrukcja dużych wyświetlaczy tego typu, zwłaszcza graficznych, jest niezwykle kosztowna i w zasadzie odchodzi do lamusa. Zaintrygowany wspomnianym rozwiązaniem postanowiłem skonstruować urządzenie o zbliżonej funkcjonalności, lecz wyposażone w znacznie większy wyświetlacz graficzny, a ponieważ z założenia urządzenie miało być proste w implementacji i niedrogie w konstrukcji – do roli elementów interfejsu użytkownika wybrałem popularne, dość duże matryce LED o organizacji 5×7 pikseli. Przyznam szczerze, że przez chwilę zastanawiałem się nad zastosowaniem programowalnych diod LED, ale biorąc pod uwagę niezbędną liczbę takich elementów (a co za tym idzie – koszt ich zakupu), jak i trudność późniejszej implementacji zrezygnowałem z tego pomysłu, pozostając przy wspomnianych już matrycach. I właśnie na bazie powyższych założeń powstał projekt urządzenia matrixClock, którego schemat pokazano na rysunku 1.
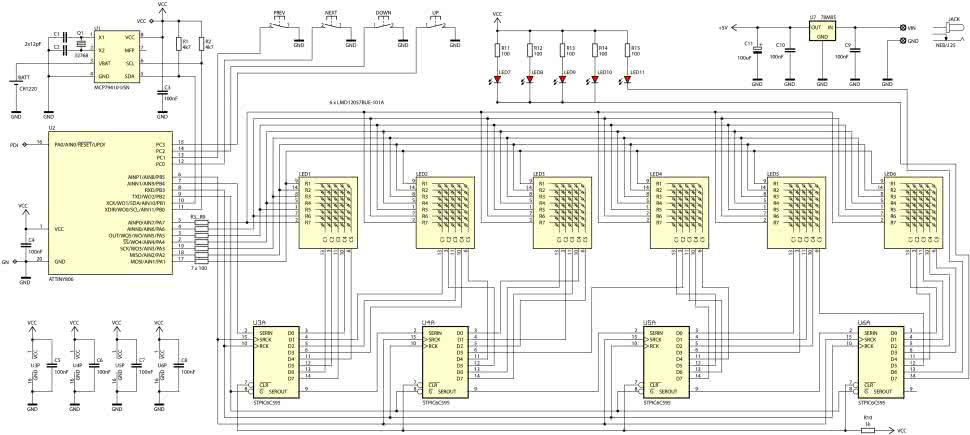
Jak widać, zaprojektowano bardzo prosty system mikroprocesorowy, którego serce stanowi niewielki, ale nowoczesny mikrokontroler ATtiny806 firmy Microchip (dawniej Atmel), taktowany wewnętrznym oscylatorem RC o częstotliwości 10 MHz i realizujący całą założoną funkcjonalność urządzenia. Mikrokontroler nasz steruje pracą grupy czterech 8-bitowych rejestrów przesuwnych (szeregowo-równoległych) typu STPIC6C595 (wyprowadzenia PB5…PB2 mikrokontrolera), dzięki którym realizuje obsługę 6 matrycowych wyświetlaczy LED w konfiguracji wspólnej anody (wyprowadzenia PA7…PA1 mikrokontrolera) oraz 5 dodatkowych diod LED, oznaczonych jako LED7…LED11. Ponadto obsługuje zegar czasu rzeczywistego z podtrzymaniem bateryjnym pod postacią układu MCP79410-I/SN firmy Microchip – oraz prostą klawiaturę złożoną z 4 przycisków typu microswitch (wyprowadzenia PC3…PC0 mikrokontrolera), przeznaczonych do obsługi urządzenia. W ramach ostatniej z wymienionych funkcjonalności układ – w celu eliminacji drgań styków oraz detekcji krótkiego i długiego naciśnięcia każdego z przycisków – używa wbudowanego weń 16-bitowego układu czasowo-licznikowego TCB0 pracującego w trybie Periodic Interrupt. Uważnego Czytelnika zastanowi zapewne fakt wyboru nietypowych rejestrów przesuwnych zamiast zwyczajowych 74HC595. Jak się zapewne domyślacie, do obsługi tylu wyświetlaczy LED skorzystano ze znanego mechanizmu multipleksowania, a że do wysterowania mamy aż 32 wspólne katody (wyświetlaczy matrycowych LED1…LED6 i diod LED7…LED11), konieczne stało się sterowanie tymi elementami dość dużym prądem, by wynikowa ich jasność była na akceptowalnym poziomie. W takim wypadku zastosowanie zwykłych 74HC595 okazałoby się niewystarczające, w związku z czym sięgnięto po element, na którego równoległych wyjściach zintegrowano tranzystory mocy DMOS pozwalające na przepływ prądu rzędu 100 mA na wyjście (przy aktywnych wszystkich wyjściach!). Dość egzotyczne może się również wydawać przyporządkowanie poszczególnych wyjść rejestrów przesuwnych do wspólnych katod elementów LED, gdyż pozornie nie ma w nim większego sensu. W sensie elektrycznym rzeczywiście tak można to postrzegać, lecz przyporządkowanie, o którym mowa powyżej, wynika z chęci uproszczenia projektu obwodu drukowanego, zaś wszelkie niedogodności z niego wynikające zostaną zniwelowane na drodze programowej.


Zegar czasu rzeczywistego jest obsługiwany przy użyciu interfejsu TWI, będącego funkcjonalnym odpowiednikiem standardu I²C firmy Philips. Już teraz zwrócę uwagę, że jeśli chcemy, by nasz zegar wspierał funkcję podtrzymywania bateryjnego, należy zastosować dokładnie taki typ układu, jaki podano powyżej (i w spisie elementów), gdyż producent tego peryferium oferuje także wersje bez tej funkcjonalności oznaczone innym sufiksem.
Wyświetlacze LED i diody LED7…LED11 są sterowane w trybie multipleksowym z częstotliwością odświeżania 60 Hz. Plik nagłówkowy zawierający najważniejsze definicje używane do obsługi multipleksu pokazano na listingu 1, zaś na listingu 2 można zobaczyć stałe definiujące wzorce poszczególnych znaków.
#define SER_REG_PORT_NAME PORTB
#define SER_REG_SRCK_MASK PIN5_bm
#define SER_REG_RCK_MASK PIN3_bm
#define SER_REG_SEROUT_MASK PIN4_bm
#define SER_REG_G_MASK PIN2_bm
#define SER_REG_AS_OUTPUTS SER_REG_PORT_NAME.DIRSET = SER_REG_SRCK_MASK|SER_REG_RCK_MASK|SER_REG_SEROUT_MASK|SER_REG_G_MASK
#define SER_REG_SRCK_SET SER_REG_PORT_NAME.OUTSET = SER_REG_SRCK_MASK
#define SER_REG_SRCK_RESET SER_REG_PORT_NAME.OUTCLR = SER_REG_SRCK_MASK
#define SER_REG_SRCK_TICK SER_REG_SRCK_SET; SER_REG_SRCK_RESET
#define SER_REG_RCK_SET SER_REG_PORT_NAME.OUTSET = SER_REG_RCK_MASK
#define SER_REG_RCK_RESET SER_REG_PORT_NAME.OUTCLR = SER_REG_RCK_MASK
#define SER_REG_RCK_TICK SER_REG_RCK_SET; SER_REG_RCK_RESET
#define SER_REG_SEROUT_SET SER_REG_PORT_NAME.OUTSET = SER_REG_SEROUT_MASK
#define SER_REG_SEROUT_RESET SER_REG_PORT_NAME.OUTCLR = SER_REG_SEROUT_MASK
#define SER_REG_G_SET SER_REG_PORT_NAME.OUTSET = SER_REG_G_MASK
#define SER_REG_G_RESET SER_REG_PORT_NAME.OUTCLR = SER_REG_G_MASK
//Definicje dla portu wspólnych anod wyświetlacza LED
#define COM_ANODE_PORT_NAME PORTA
#define COM_ANODE_AS_OUTPUTS COM_ANODE_PORT_NAME.DIRSET = 0xFF
//Definicje dla funkcji wyświetlających
#define NORMAL 0
#define BLINKING 1
//Deklaracje zmiennych globalnych
extern uint8_t Cols[32]; //Zmienna przechowująca zawartość wyświetlacza LED (30 kolumn liczonych od lewej do prawej
//+ 2 dodatkowe upraszczające kod ISR)
extern volatile uint8_t Colon, Dot, Blinking; //Zmienne przechowujące stan dwukropków, kropki i migania
extern volatile uint8_t readyForUpdate; //Zezwolenie na atomową zmianę zmiennych
void initMultiplex(void);
void showChar(uint8_t Char, uint8_t Position, uint8_t Offset, uint8_t Blink);
Listing 1. Plik nagłówkowy mechanizmu multipleksowania
const uint8_t Font5x8[] PROGMEM =
{
0x00, 0x00, 0x00, 0x00, 0x00, //spacja
0x00, 0x00, 0x5F, 0x00, 0x00, // !
0x00, 0x07, 0x00, 0x07, 0x00, // "
0x14, 0x7F, 0x14, 0x7F, 0x14, // #
0x24, 0x2A, 0x7F, 0x2A, 0x12, // $
0x23, 0x13, 0x08, 0x64, 0x62, // %
0x36, 0x49, 0x55, 0x22, 0x50, // &
0x00, 0x05, 0x03, 0x00, 0x00, // ‘
0x00, 0x1C, 0x22, 0x41, 0x00, // (
0x00, 0x41, 0x22, 0x1C, 0x00, // )
0x08, 0x2A, 0x1C, 0x2A, 0x08, // *
0x08, 0x08, 0x3E, 0x08, 0x08, // +
0x00, 0x50, 0x30, 0x00, 0x00, // ,
0x08, 0x08, 0x08, 0x08, 0x08, // -
0x00, 0x30, 0x30, 0x00, 0x00, // .
0x20, 0x10, 0x08, 0x04, 0x02, // /
0x3E, 0x51, 0x49, 0x45, 0x3E, // 0
0x00, 0x42, 0x7F, 0x40, 0x00, // 1
0x42, 0x61, 0x51, 0x49, 0x46, // 2
0x21, 0x41, 0x45, 0x4B, 0x31, // 3
0x18, 0x14, 0x12, 0x7F, 0x10, // 4
0x27, 0x45, 0x45, 0x45, 0x39, // 5
0x3C, 0x4A, 0x49, 0x49, 0x30, // 6
0x01, 0x71, 0x09, 0x05, 0x03, // 7
0x36, 0x49, 0x49, 0x49, 0x36, // 8
0x06, 0x49, 0x49, 0x29, 0x1E, // 9
0x3E, 0x51, 0x49, 0x45, 0x3E, // : -> 0 – ponownie, dla mechanizmu animacji
};
//Tablica przechowująca kolejność (od prawej do lewej) poszczególnych kolumn wyświetlacza
//LED widzianą od strony rejestrów przesuwnych. 1->DOT, 0->COLON
const uint8_t colPattern[32] = {25, 26, 24, 31, 27, 30, 18, 29, 28, 19, 17, 22, 16, 23, 21, 10, 20, 9, 8, 11, 15, 12, 14, 13, 2, 7, 3, 6, 5, 4, 1, 0};
Listing 2. Definicje niezbędnych stałych mechanizmu multipleksowania
Zastosowane rozwiązania programowe, mające na celu optymalizację szybkości wykonywania kodu, objaśniono już przy okazji projektu miernika pojemności cMeter, opublikowanego w EP 05/2024 – zainteresowanych Czytelników zachęcamy do zapoznania się z zamieszczonym tam szczegółowym opisem.
Funkcję konfigurującą mechanizm multipleksowania i dokonującą niezbędnych ustawień sprzętowych pokazano na listingu 3.
{
//Porty sterujące rejestrami przesuwnymi jako wyjściowe ze stanami nieaktywnymi (0)
SER_REG_AS_OUTPUTS;
//Port wspólnych anod, jako wyjściowy ze stanami nieaktywnymi (0)
COM_ANODE_AS_OUTPUTS;
//Konfiguracja Timera TCA0 odpowiedzialnego za mechanizm multipleksowania. Stosowne przerwanie
//systemowe wywoływane 1920 razy na sekundę, czyli 60 razy na sekundę dla każdej kolumny LED/diod dwukropka i kropki
TCA0.SINGLE.PER = 5207;
TCA0.SINGLE.CTRLA = TCA_SINGLE_CLKSEL_DIV1_gc|TCA_SINGLE_ENABLE_bm;
TCA0.SINGLE.INTCTRL = TCA_SINGLE_OVF_bm;
}
Listing 3. Funkcja konfigurująca mechanizm multipleksowania
Dalej, na listingu 4 zamieszczono funkcję obsługi przerwania od przepełnienia licznika TCA0, odpowiedzialną za realizację mechanizmu multipleksowania wyświetlacza LED.
{
static uint8_t Idx, bigTick;
static uint16_t smallTick;
//Kasujemy flagę OVF, gdyż nie jest kasowana sprzętowo
TCA0.SINGLE.INTFLAGS = TCA_SINGLE_OVF_bm;
//Wyłączamy wszystkie bufory wyjściowe rejestrów przesuwnych dezaktywując tym samym kolumny wyświetlaczy LED
SER_REG_G_SET;
//Obsługujemy Tick migania – co 0.25 s
if(++smallTick == 480)
{
smallTick = 0;
bigTick ^= 1;
}
//Wybieramy kolejną z rzędu kolumnę wyświetlaczy LED wysyłając stosowny ciąg danych do rejestrów przesuwnych
//Zaczynamy od kolumn wyświetlaczy LED po czym przechodzimy do kolumn sterujących dwukropkami i kropką
for(uint8_t i=0; i<32; ++i)
{
if(i == colPattern[Idx])
{
if(Idx < 30) //Kolumny wyświetlaczy LED
{
if(Blinking & (1 << (Idx/5)))
{
if(bigTick) SER_REG_SEROUT_SET; else SER_REG_SEROUT_RESET;
}
else SER_REG_SEROUT_SET;
}
else if(Idx == 30) //30 -> DOT (kropka)
{
if(Dot) SER_REG_SEROUT_SET; else SER_REG_SEROUT_RESET;
}
else //31 -> COLON (dwukropki)
{
if(Colon) SER_REG_SEROUT_SET; else SER_REG_SEROUT_RESET;
}
}
else SER_REG_SEROUT_RESET;
//Sygnał zegarowy
SER_REG_SRCK_TICK;
}
//Transfer stanów rejestrów przesuwnych do ich buforów wyjściowych (jeszcze nieaktywnych)
SER_REG_RCK_TICK;
//Na port wyjściowy wspólnych anod wystawiamy wzór do wyświetlenia
COM_ANODE_PORT_NAME.OUT = Cols[Idx];
//Włączamy wszystkie bufory wyjściowe rejestrów przesuwnych aktywując tym samym kolumny wyświetlaczy LED
SER_REG_G_RESET;
//Wybieramy kolejną z rzędu kolumnę. Opcjonalnie zezwolenie na atomową zmianę zmienej Cols[] w funkcji Main
Idx = (Idx +1) & 0x1F;
if(Idx == 0) readyForUpdate = 1; else readyForUpdate = 0;
}
Listing 4. Funkcja obsługi przerwania realizująca mechanizm multipleksowania
Listing 5 pokazuje funkcję wyświetlającą wzorzec znaku na elemencie LED. Jak widać, funkcja przyjmuje zarówno argument przesunięcia w pionie wzorca znaku o liczbę zdefiniowanych pikseli obrazu (w zakresie 0…8), co zostanie użyte w mechanizmie animacji zmian wyświetlanych cyfr – jak i argument odpowiedzialny za miganie wyświetlanej treści, co znajdzie z kolei zastosowanie w menu ustawień urządzenia (do wyróżnienia wartości poddawanej edycji). To już wszystko, jeśli chodzi o funkcje obsługi wyświetlacza LED – przejdźmy zatem do grupy funkcji odpowiedzialnych za obsługę interfejsu TWI. Nie jest to szczególnie nowatorskie rozwiązanie, jednak interfejs TWI w nowych mikrokontrolerach AVR Tiny z serii 0 różni się znacząco – pod względem sposobu obsługi, rozmieszczenia i znaczenia rejestrów konfiguracyjnych – od starszych wersji tych mikrokontrolerów, dlatego warto mu się przyjrzeć bliżej.
Warto podkreślić, że prezentowane rozwiązanie nie będzie na wskroś uniwersalne (zależało mi bowiem na prostocie rozwiązań programistycznych), lecz w tak prostych zastosowaniach, jak omówione tutaj, moim zdaniem okazuje się wystarczająco dobre. Stosowny driver (w tym używający przerwań TWI) możemy zresztą wygenerować automatycznie z poziomu środowiska Microchip Studio, lecz jak możecie się sami przekonać, rozwiązanie proponowane przez producenta jest bardzo skomplikowane. Dzieje się tak, gdyż – jeśli ma pozostać w pełni uniwersalne – musi operować na dość dużym poziomie abstrakcji.
{
uint8_t prevByte, nextByte;
uint16_t Index;
//Ustalamy index początku wzorca znaku, który to zamierzamy wyświetlić (odejmujemy 32, gdyż tablica zaczyna się od spacji)
Index = (Char – ‘ ‘) * 5;
//Czekamy na zezwolenie na aktualizację zawartości wyświetlacza LED
readyForUpdate = 0;
while(readyForUpdate == 0);
//Aktualizujemy zawartość wyświetlacza uwzględniając przesunięcie wzorca cyfry
for(uint8_t i=0; i<5; ++i)
{
prevByte = (uint8_t) pgm_read_byte(&Font5x8[Index]) >> Offset;
nextByte = (uint8_t) pgm_read_byte(&Font5x8[Index+5]) << (8-Offset);
Cols[i+(Position*5)] = prevByte|nextByte;
Index++;
}
//Aktualizujemy stan zmiennej odpowiadającej za miganie
if(Blink == BLINKING) Blinking |= (1<<Position); else Blinking &= ~(1<<Position);
}
Listing 5. Funkcja odpowiedzialna za wyświetlenie wzorca znaku na wyświetlaczu LED
#define I²C_PORT_NAME PORTB
#define I²C_SDA_PINCTRL_REG PIN1CTRL //PB1
#define I²C_SCL_PINCTRL_REG PIN0CTRL //PB0
//Definicje częstotliwości magistrali oraz czasu narastania zboczy
#define I²C_FREQUENCY 400000UL //Częstotliwość magistrali [Hz]
#define I²C_RISE_TIME 100UL //Czas narastania zboczy zależny od impedancji magistrali [ns]
#define I²C_BAUD (uint8_t)((((((float) F_CPU/(float) I²C_FREQUENCY)) – 10 – ((float) F_CPU * I²C_RISE_TIME/1000000))) / 2)
//Definicje bitu potwierdzenia (ACK)
#define NACK 0
#define ACK 1
//Definicje statusów wykonania funkcji
#define OK 0
#define FAILED 255
Listing 6. Plik nagłówkowy modułu obsługi interfejsu I²C mikrokontrolerów AVR Tiny 0-series
Zacznijmy od pliku nagłówkowego, którego ciało pokazano na listingu 6. Dalej, na listingu 7, zaprezentowano ciało funkcji inicjalizującej interfejs TWI mikrokontrolera AVR Tiny 0-series.
{
//Podciągnięcie portów SDA i SCL pod VCC
I²C_PORT_NAME.I²C_SDA_PINCTRL_REG = PORT_PULLUPEN_bm;
I²C_PORT_NAME.I²C_SCL_PINCTRL_REG = PORT_PULLUPEN_bm;
TWI0.MBAUD = I²C_BAUD; //Ustawienie częstotliwości magistrali
TWI0.MCTRLA = TWI_ENABLE_bm; //Włączenie modułu I²C -> Tryb Master bez przerwań (tzw. pooling)
TWI0.MSTATUS = TWI_BUSSTATE_IDLE_gc; //Domyślny tryb magistrali (Idle)
}
Listing 7. Ciało funkcji inicjalizującej sprzęg TWI mikrokontrolera AVR Tiny 0-series
{
//Wysyłamy sygnał START z adresem klienta. Adres zawiera w sobie bit R/W (bit 0) decydujący o kierunku transmisji
TWI0.MADDR = Address;
while (!(TWI0.MSTATUS & (TWI_WIF_bm | TWI_RIF_bm))); //Czekamy na zakończenie operacji
//Jeśli doszło do błędu lub arbitrażu na magistrali i dostęp do niej został utracony zwracamy FAILED i czekamy na zwolnienie magistrali
if(TWI0.MSTATUS & TWI_ARBLOST_bm)
{
while(!(TWI0.MSTATUS & TWI_BUSSTATE_IDLE_gc)); //Czekamy na zwolnienie magistrali
return FAILED;
}
//Jeśli klient nie potwierdził swojego adresu wysyłamy sygnał STOP i czekamy na zwolnienie magistrali
else if(TWI0.MSTATUS & TWI_RXACK_bm)
{
TWI0.MCTRLB |= TWI_MCMD_STOP_gc; //Wysyłamy sygnał STOP
while(!(TWI0.MSTATUS & TWI_BUSSTATE_IDLE_gc)); //Czekamy na zwolnienie magistrali
return FAILED;
}
return OK;
}
Listing 8. Ciało funkcji odpowiedzialnej za wygenerowanie sygnału START interfejsu I²C i przesłanie adresu klienta
{
TWI0.MCTRLB |= TWI_MCMD_STOP_gc; //Wysyłamy sygnał STOP
while(!(TWI0.MSTATUS & TWI_BUSSTATE_IDLE_gc)); //Czekamy na zwolnienie magistrali
}
Listing 9. Ciało funkcji odpowiedzialnej za wygenerowanie sygnału STOP interfejsu I²C
Na listingu 8 pokazano z kolei ciało funkcji odpowiedzialnej za wygenerowanie sygnału START interfejsu I²C i przesłanie adresu slave’a (wraz z bitem kierunku R/W), zaś na listingu 9 – ciało funkcji odpowiedzialnej za wygenerowanie sygnału STOP interfejsu I²C. I na koniec dwie kluczowe funkcje, pozwalające na zapis i odczyt bajtu poprzez interfejs I²C, których ciała pokazano odpowiednio na listingach 10 i 11.
FREQSEL[1:0]: 101
RSTPINCFG[1:0]: 002
SUT[2:0]: 1111
EESAVE: 01
1 ustawienie domyślne producenta
2 szczegóły w treści artykułu
{
TWI0.MDATA = Byte;
TWI0.MCTRLB = TWI_MCMD_RECVTRANS_gc; //Wysyłamy bajt danych
while(!(TWI0.MSTATUS & TWI_WIF_bm)) //Czekamy na zakończenie transmisji
//Jeśli doszło do błędu lub arbitrażu na magistrali i dostęp do niej został utracony zwracamy FAILED
if(TWI0.MSTATUS & (TWI_ARBLOST_bm | TWI_BUSERR_bm)) return FAILED;
return!(TWI0.MSTATUS & TWI_RXACK_bm); //Zwracamy bit ACK
}
Listing 10. Ciało funkcji odpowiedzialnej za zapis bajtu poprzez interfejs I²C
{
uint8_t Byte;
while(!(TWI0.MSTATUS & TWI_RIF_bm)); //Czekamy na zakończenie odczytu
Byte = TWI0.MDATA;
//Wysyłamy sygnał ACK, gdy oczekujemy więcej danych (i wznawiamy transmisję) lub sygnał NACK
if(Ack) TWI0.MCTRLB = TWI_MCMD_RECVTRANS_gc|TWI_ACKACT_ACK_gc; else TWI0.MCTRLB = TWI_ACKACT_NACK_gc;
return Byte;
}
Listing 11. Ciało funkcji odpowiedzialnej za odczyt bajtu poprzez interfejs I²C
Skoro wiemy już, jak obsługiwać interfejs TWI naszego mikrokontrolera, pora na omówienie modułu obsługi zegara MCP79410-I/SN. Tradycyjnie zacznijmy od pliku nagłówkowego, którego ciało pokazano na listingu 12.
typedef struct
{
uint8_t Hour; //0...23
uint8_t Minute; //0...59
uint8_t Second; //0...59
}timeType;
typedef struct
{
uint8_t weekDay; //1...7
uint8_t Day; //1...31
uint8_t Month; //1...12
uint8_t Year; //0...99
}dateType;
//Prototypy funkcji modułu
void RTCinit(uint8_t Settings);
void RTCwriteTime(timeType *Time);
void RTCreadTime(timeType *Time);
void RTCwriteDate(dateType *Date);
void RTCreadDate(dateType *Date);
//Definicje adresów układu MCP79410 w trybie zapisu/odczytu
#define MCP79410_WRITE_ADDR 0xDE
#define MCP79410_READ_ADDR 0xDF
//Definicje najważniejszych rejestrów sterujących i ich właściwości
#define TIME_START_REG 0x00
#define START_OSCILLATOR (1<<7)
#define STOP_OSCILLATOR (0<<7)
#define DATE_START_REG 0x03
#define VBAT_ENABLE (1<<3)
#define VBAT_DISABLE (0<<3)
#define CONTROL_REG 0x07
#define MFP_AS_OUTPUT_1 (1<<7)
#define MFP_AS_OUTPUT_0 (0<<7)
#define MFP_AS_SQUARE_OUTPUT (1<<6)
#define MFP_AS_NORMAL_OUTPUT (0<<6)
#define NO_ALARMS_ACTIVE (0<<4)
#define ALARM0_ACTIVE (1<<4)
#define ALARM1_ACTIVE (2<<4)
#define BOTH_ALARMS_ACTIVE (3<<4)
#define EXTERNAL_OSCILLATOR (1<<3)
#define INTERNAL_OSCILLATOR (0<<3)
#define SQUARE_1HZ 0x00
#define SQUARE_4096HZ 0x01
#define SQUARE_8192HZ 0x02
#define SQUARE_32768HZ 0x03
#define RAM_START_REG 0x20
Listing 12. Plik nagłówkowy modułu obsługi układu MCP79410
Jak widać, wprowadzono dwa dodatkowe typy strukturalne (timeType, dateType), odpowiedzialne za przechowywanie oraz przetwarzanie czasu i daty wbudowanego zegara RTC. Następnie, na listingu 13, pokazano funkcję, której zadaniem jest konfiguracja cech sprzętowych zegara czasu rzeczywistego.
{
i2cStart(MCP79410_WRITE_ADDR); //Adres MCP79410 do zapisu
i2cWriteByte(CONTROL_REG); //Adres startowy rejestru ustawień zegara RTC
i2cWriteByte(Settings); //Ustawienia zegara RTC
i2cStop();
}
Listing 13. Funkcja odpowiedzialna za konfigurację układu MCP79410
Argument wywołania tejże funkcji decyduje o ustawieniach RTC (np. ustawieniach wyjścia MFP) i w przypadku naszego urządzenia przyjmuje wartość:
MFP_AS_SQUARE_OUTPUT|NO_ALARMS_ACTIVE|INTERNAL_OSCILLATOR|SQUARE_1HZ;
{
i2cStart(MCP79410_WRITE_ADDR); //Adres MCP79410 do zapisu
i2cWriteByte(TIME_START_REG); //Adres startowy rejestru czasu (w tym przypadku sekund)
i2cWriteByte(((Time->Second/10)<<4)|(Time->Second%10)|START_OSCILLATOR); //Sekundy w zapisie BCD + start oscylatora
i2cWriteByte(((Time->Minute/10)<<4)|(Time->Minute%10)); //Minuty w zapisie BCD
i2cWriteByte(((Time->Hour/10)<<4)|(Time->Hour%10)); //Godziny w zapisie BCD (standardowo zapis 24-godzinny)
i2cStop();
}
void RTCreadTime(timeType *Time)
{
uint8_t readByte;
i2cStart(MCP79410_WRITE_ADDR); //Adres MCP79410 do zapisu
i2cWriteByte(TIME_START_REG); //Adres startowy rejestru czasu (w tym przypadku sekund)
i2cStart(MCP79410_READ_ADDR); //Adres MCP79410 do odczytu
readByte = i2cReadByte(ACK) & 0x7F; //Sekundy w zapisie BCD – maskujemy bit pracującego
//oscylatora (bit7)
Time->Second = ((readByte>>4)*10) + (readByte&0x0F);
readByte = i2cReadByte(ACK); //Minuty w zapisie BCD
Time->Minute = ((readByte>>4)*10) + (readByte&0x0F);
readByte = i2cReadByte(NACK); //Godziny w zapisie BCD (standardowo zapis 24-godzinny)
Time->Hour = (((readByte&0x30)>>4)*10) + (readByte&0x0F);
i2cStop();
}
Listing 14. Funkcje przeznaczone do odczytu i zapisu czasu układu MCP79410
Na listingu 14 pokazano z kolei dwie proste funkcje narzędziowe, umożliwiające odczyt i zapis czasu RTC, zaś na listingu 15 – bliźniacze dwie funkcje odczytu i zapisu, ale tym razem daty.
{
i2cStart(MCP79410_WRITE_ADDR); //Adres MCP79410 do zapisu
i2cWriteByte(DATE_START_REG); //Adres startowy rejestru daty (w tym przypadku dni tygodnia)
i2cWriteByte(Date->weekDay|VBAT_ENABLE); //Dzień tygodnia + aktywacja podtrzymania bateryjnego
i2cWriteByte(((Date->Day/10)<<4)|(Date->Day%10)); //Dzień w zapisie BCD
i2cWriteByte(((Date->Month/10)<<4)|(Date->Month%10)); //Miesiąc w zapisie BCD
i2cWriteByte(((Date->Year/10)<<4)|(Date->Year%10)); //Rok w zapisie BCD
i2cStop();
}
void RTCreadDate(dateType *Date)
{
uint8_t readByte;
i2cStart(MCP79410_WRITE_ADDR); //Adres MCP79410 do zapisu
i2cWriteByte(DATE_START_REG); //Adres startowy rejestru daty (w tym przypadku dni tygodnia)
i2cStart(MCP79410_READ_ADDR); //Adres MCP79410 do odczytu
Date->weekDay = i2cReadByte(ACK) & 0x07; //Dzień tygodnia
readByte = i2cReadByte(ACK); //Dzień w zapisie BCD
Date->Day = ((readByte>>4)*10) + (readByte&0x0F);
readByte = i2cReadByte(ACK); //Miesiąc w zapisie BCD
Date->Month = (((readByte & 0x10)>>4)*10) + (readByte&0x0F);
readByte = i2cReadByte(NACK); //Rok w zapisie BCD
Date->Year = ((readByte>>4)*10) + (readByte&0x0F);
i2cStop();
}
Listing 15. Funkcje przeznaczone do odczytu i zapisu daty układu MCP79410
W telegraficznym skrócie omówiliśmy kwestie implementacyjne, w związku z czym w drugiej części artykułu omówimy zagadnienia związane z montażem i obsługą urządzenia.
Robert Wołgajew, EP
- R1, R2: 4.7 kΩ
- R3…R9: 100 Ω
- R10: 1 kΩ
- R11…R15: 100 Ω
- C1, C2: ceramiczny X7R 12 pF
- C3…C10: ceramiczny X7R 100 nF
- C11: tantalowy 100 μF/10V (obudowa C/6032-28R)
- U1: MCP79410-I/SN (obudowa SO08)
- U2: ATTINY806 (obudowa SO20)
- U3…U6: STPIC6C595 (obudowa SO16)
- U7: 78M05 (obudowa DPAK)
- LED1…LED6: wyświetlacz matrycowy LMD12057BUE-101A, OSK351541-BR lub podobny o wybranym kolorze
- LED7…LED11: dioda LED ∅ 3 mm czerwona, płaska
- Q1: rezonator kwarcowy zegarkowy 32768 Hz
- BATT: gniazdo baterii CR1220 typu CONNFLY DS1092-12-N8S
- PREV, NEXT, DOWN, UP: microswitch TACT kątowy do montażu przewlekanego typu TL1105SF250Q lub podobny (wysokość 6 mm)
- JACK: gniazdo zasilające do montażu przewlekanego typu NEB/J 25 (Lumberg) lub podobne
- CR1220: bateria litowa pastylkowa typu CR1220












