 Zaloguj
Zaloguj



- uzyskuje się pole widzenia o zakresie 180° zarówno w płaszczyźnie horyzontalnej jak i wertykalnej dla kamerki ze standardowym obiektywem,
- sterowanie modułem kamery odbywa się za pośrednictwem przeglądarki internetowej i stron generowanych przez sam moduł,
- możliwość sterowania kamerą i ramieniem przy pomocy rozkazów wpisywanych bezpośrednio w pasku przeglądarki i przesyłanych w trybie GET.
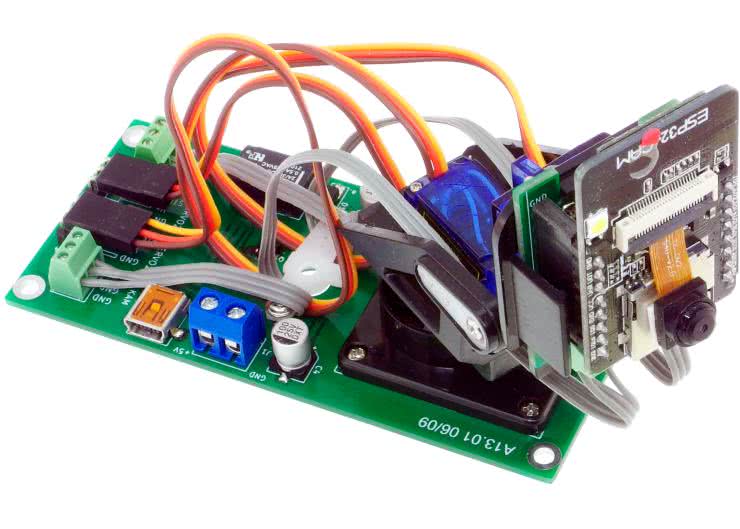
Kamera montowana w gnieździe ZIF modułu ma niewymienny obiektyw o kącie widzenia około 25°. W niektórych serwisach internetowych oferowane są kamerki z obiektywami o szerszym kącie, który powoduje zniekształcenie obrazu czyli tzw. efekt rybiego oka. W tym projekcie dzięki umieszczeniu modułu na ruchomym ramieniu uzyskuje się pole widzenia o zakresie 180° zarówno w płaszczyźnie horyzontalnej jak i wertykalnej i to dla kamerki ze standardowym obiektywem. Wygląd gotowej konstrukcji pokazuje zdjęcie tytułowe.
Konstrukcja zdalnie sterowanego mechanizmu
W skład projektu wchodzi: ramię przegubowe z miniaturowymi serwomechanizmami, 2 płytki drukowane i moduł ESP32-CAM, który po zaprogramowaniu pracuje jako serwer sieciowy dodatkowo sterujący ruchami ramienia. Mniejsza z płytek drukowanych służy do zamocowania modułu na końcu ramienia oraz do doprowadzenia zasilania i sygnałów do ESP32-CAM. Większa płytka pełni rolę stabilnej podstawy dla ramienia. Znajdują się na niej gniazda do przyłączenia kabli serwomechanizmów, przewodów sygnałowych z modułu oraz elementy obwodu zasilania.
Budowa i działanie
Schemat ideowy układu zamontowanego na obydwu płytkach pokazany został na rysunku 1 i rysunku 2.
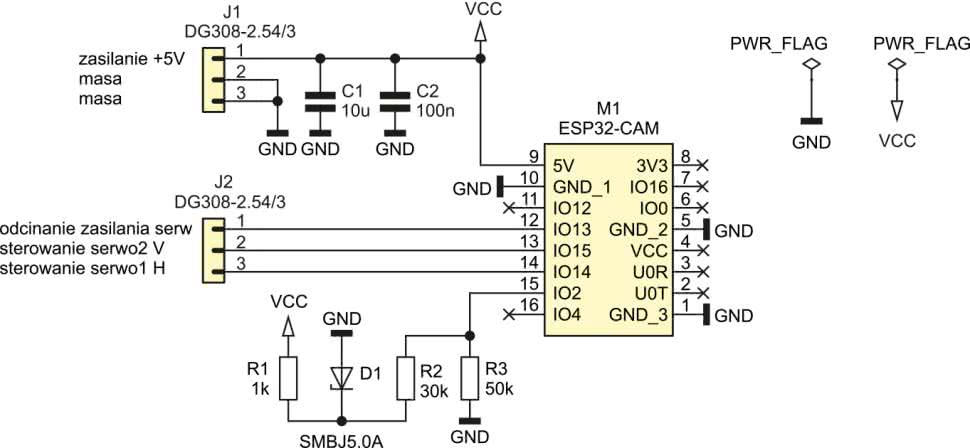
Jak widać nie jest on bardzo skomplikowany. Na schemacie z rysunku 1 pokazano połączenia elementów zamontowanych na małej płytce. Do osadzenia modułu ESP32-CAM służy gniazdo M1 składające się z 2 listw gniazd goldpin o rastrze 2,54 mm. Gniazdo J1 dostarcza do modułu zasilania VCC o napięciu +5 V. Na kolejnych stykach gniazda J2 wyprowadzono:
- sygnał załączania przekaźnika doprowadzającego zasilanie do serw – J2-1,
- sygnały PWM sterujące serwomechanizmami ramienia w płaszczyźnie:
- wertykalnej – J2-2,
- horyzontalnej – J2-3.
Oporniki R2, R3 tworzą dzielnik obniżający wartość napięcia VCC do poziomu umożliwiającego jego podanie na wejście przetwornika ADC IO2. Szybka dioda D1 dodatkowo zabezpiecza wejście przed przepięciami. Pomiary napięcia VCC będą wykorzystywane w kolejnych wersjach oprogramowania.
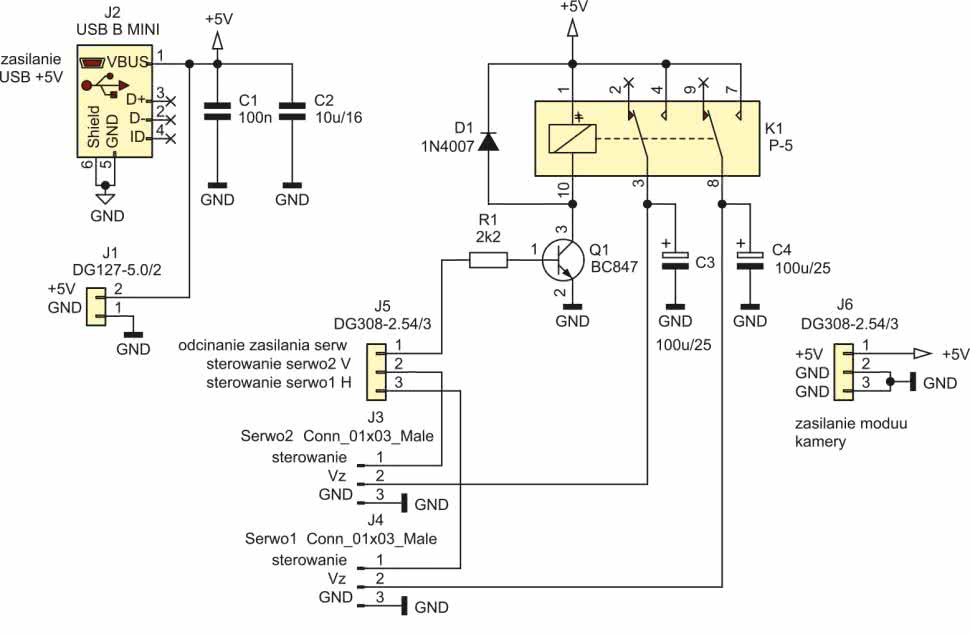
Na schemacie z rysunku 2 pokazane zostały połączenia pomiędzy elementami zamontowanymi na dużej płytce. Napięcie zasilania +5 V z zewnętrznego zasilacza podawane jest na gniazdo J2 typu mini USB. Do gniazda podłączona jest równolegle kostka zaciskowa J1. Zasilanie można podłączyć albo do gniazda albo do kostki.
Uwaga! Obwody zasilania nie są zabezpieczone przed omyłkową zmianą polaryzacji. Nie należy podłączać zasilania jednocześnie do gniazda i do kostki.
Gniazdo J6 służy do podania zasilania na małą płytkę. Z kolei z małej płytki do gniazda J5 podawane są sygnały PWM sterujące serwami. Z tego samego gniazda, ze złącza J5-1 pobierany jest sygnał załączania przekaźnika K1. Przewody serwomechanizmów należy podłączyć do styków złącz J3 i J4.
Montaż i uruchomienie
Montaż można rozpocząć od złożenie ruchomego ramienia poruszanego miniaturowymi serwomechanizmami typu SG90 lub MG90. Ułatwieniem może być dokumentacja producenta ramienia [1].
Schematy płytek PCB zostały pokazane na rysunku 3 i na rysunku 4.
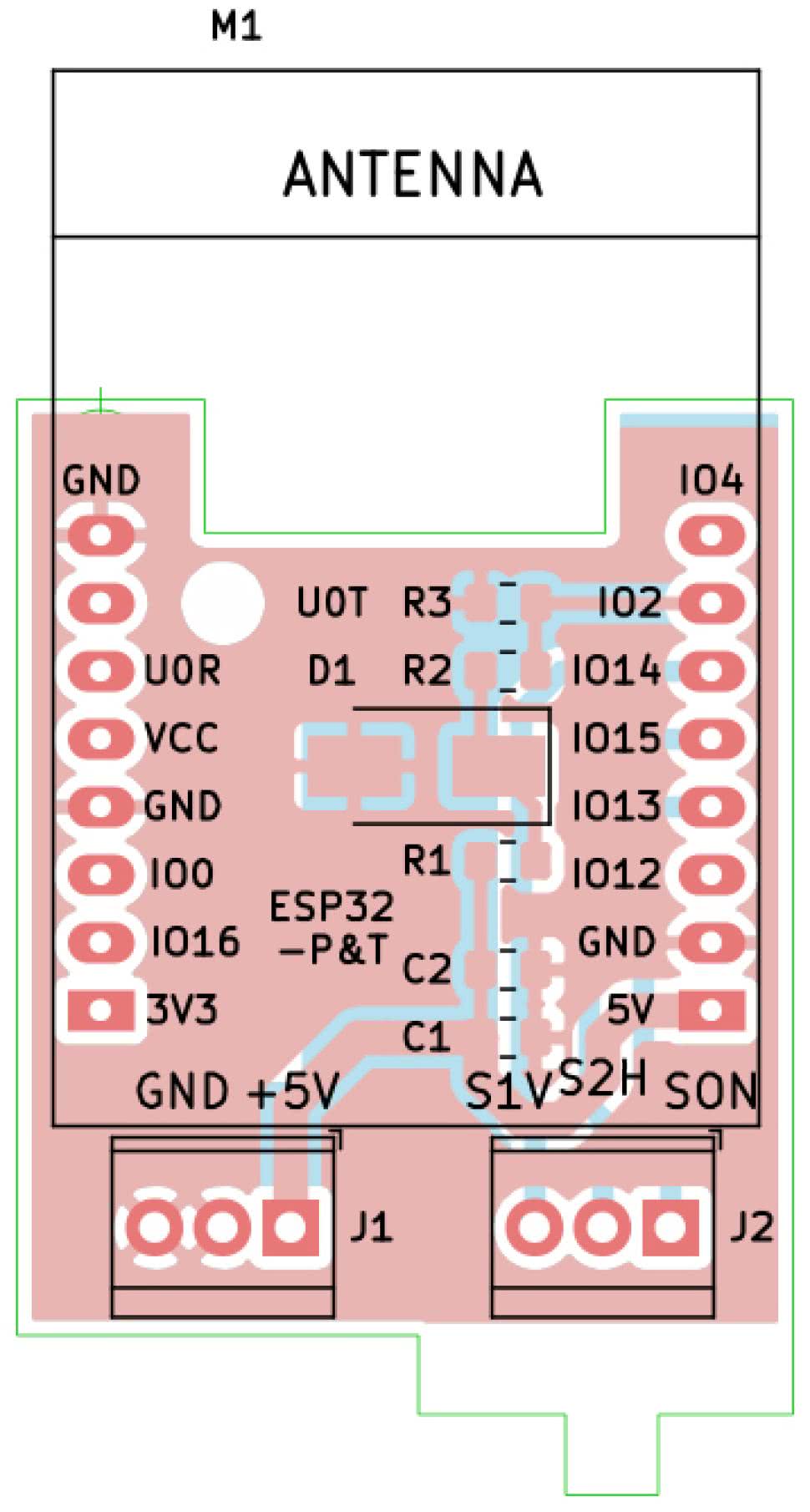
Końcówki elementów przewlekanych przeznaczonych do montażu na małej płytce należy maksymalnie skrócić i obciąć tak, żeby nie wystawały ponad pola lutownicze. Ułatwia to mocowanie płytki drukowanej, którą przykręca się jednym wkrętem do uchwytu kamery na końcu ramienia. Otwór pod wkręt należy wywiercić w plastikowej płytce uchwytu kamery. Gniazda J1, J2 trzeba wlutować otworami dla kabli na zewnątrz w kierunku brzegu płytki.
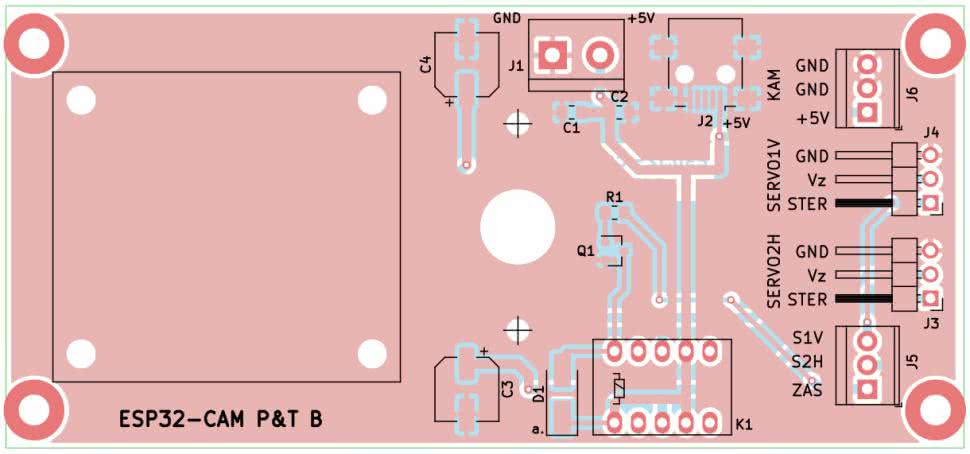
Z kolei na dużej płytce drukowanej, śrubowe gniazda zaciskowe J5, J6 należy wlutować otworami na kable do wewnątrz płytki co ułatwi poprowadzenie przewodów (fotografia 1). To samo dotyczy złącz J3, J4 do podłączania kabli serwomechanizmów. Następnym krokiem jest przykręcenie podstawy ramienia do dużej płytki drukowanej. Posłużą do tego śrubki dołączone do zestawu montażowego ramienia o długości 6 mm i średnicy 2 mm.
Należy poprowadzić przewody łączące styki gniazda J1 małej płytki ze stykami gniazda J6 dużej płytki oraz styki gniazda J2 ze stykami J5. Połączone powinny być ze sobą styki gniazd o tych samych numerach. Do połączeń należy użyć cienkich kabli, które nie będą stawiać dużych oporów w czasie ruchów ramienia. W modelu użyto fragmentów szarego wielożyłowego kabla taśmy komputerowej. Każdy z odcinków powinien mieć długość 15...20 cm. Należy usunąć kilku milimetrowe końcówki izolacji na krańcach przewodów a druty żyły zagiąć do tyłu. Następnie zacisnąć żyłę razem z izolacją w otworach kostek gniazd śrubowych. Dzięki temu zapewniony zostanie kontakt elektryczny a przewód nie będzie się urywał podczas ruchu ramienia.
Przewody można pozostawić swobodnie albo przed zamocowaniem w gniazdach dużej płytki zwinąć w pętle i unieruchomić poprzeczką przykręconą dwoma wkrętami (po obu stronach dużego otworu) do większej płytki. W modelu do mocowania pętli przewodów użyto niewykorzystaną belkę orczyka, skróconą i z nawierconymi otworami dla wkrętów mocujących.
Na koniec w rogach większej płytki można przylepić gumowe nóżki, które zapewnią lepszą stabilność całej konstrukcji.
Oprogramowanie
Sterowanie modułem kamery odbywa się za pośrednictwem przeglądarki internetowej i stron generowanych przez sam moduł. Oprogramowanie modułu powstało jako rozszerzenie szkicu dla Arduino [2], który z kolei bazuje na przykładowym opracowaniu producenta procesora ESP32 firmy Espressif [3]. W porównaniu do pierwowzoru wprowadzono kilka zmian: zrezygnowano z funkcji rozpoznawania twarzy, dodano możliwość zdalnej aktualizacji nowych wersji oprogramowania drogą radiową (OTA), wprowadzono możliwość przywracania ustawień kamery, uporządkowano i uproszczono wygląd wyświetlanych w przeglądarce stron generowanych przez moduł ESP32-CAM.
No i oczywiście dodano możliwość sterowania serwami użytymi do poruszania ramieniem.
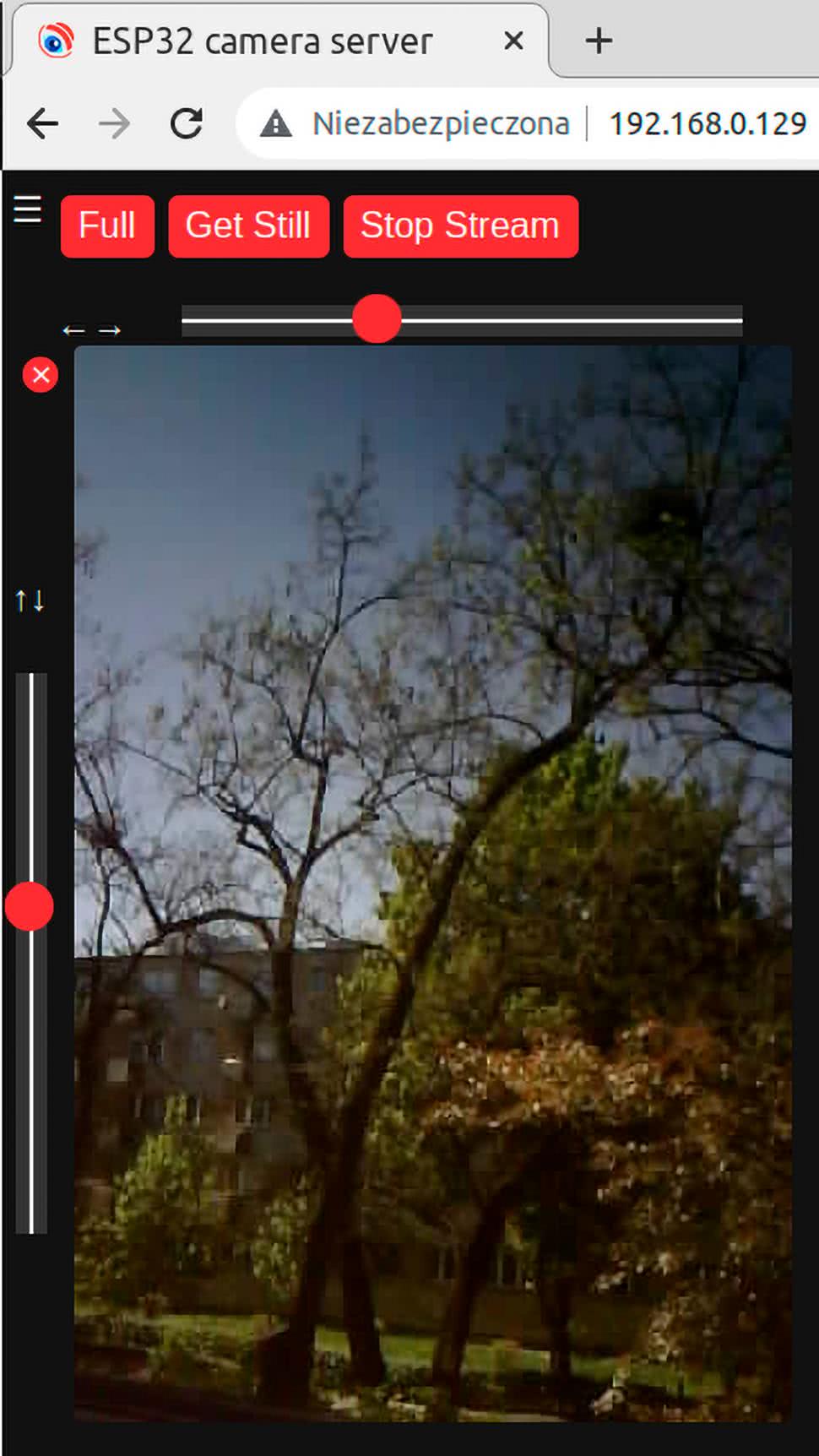
Można wybierać pomiędzy maksymalnie uproszczonym widokiem strony sterującej (rysunek 5), rozwinięciem z dostępem zarówno do suwaków jak i przycisków precyzyjnego ustawiania położenia ramienia z kamerą (rysunek 6), albo uzyskać dostęp do wielu nastaw kamery (rysunek 7). Przełączanie pomiędzy różnymi widokami strony z elementami sterującymi uzyskuje się po naciśnięciu elementu oznaczonego jako Menu.
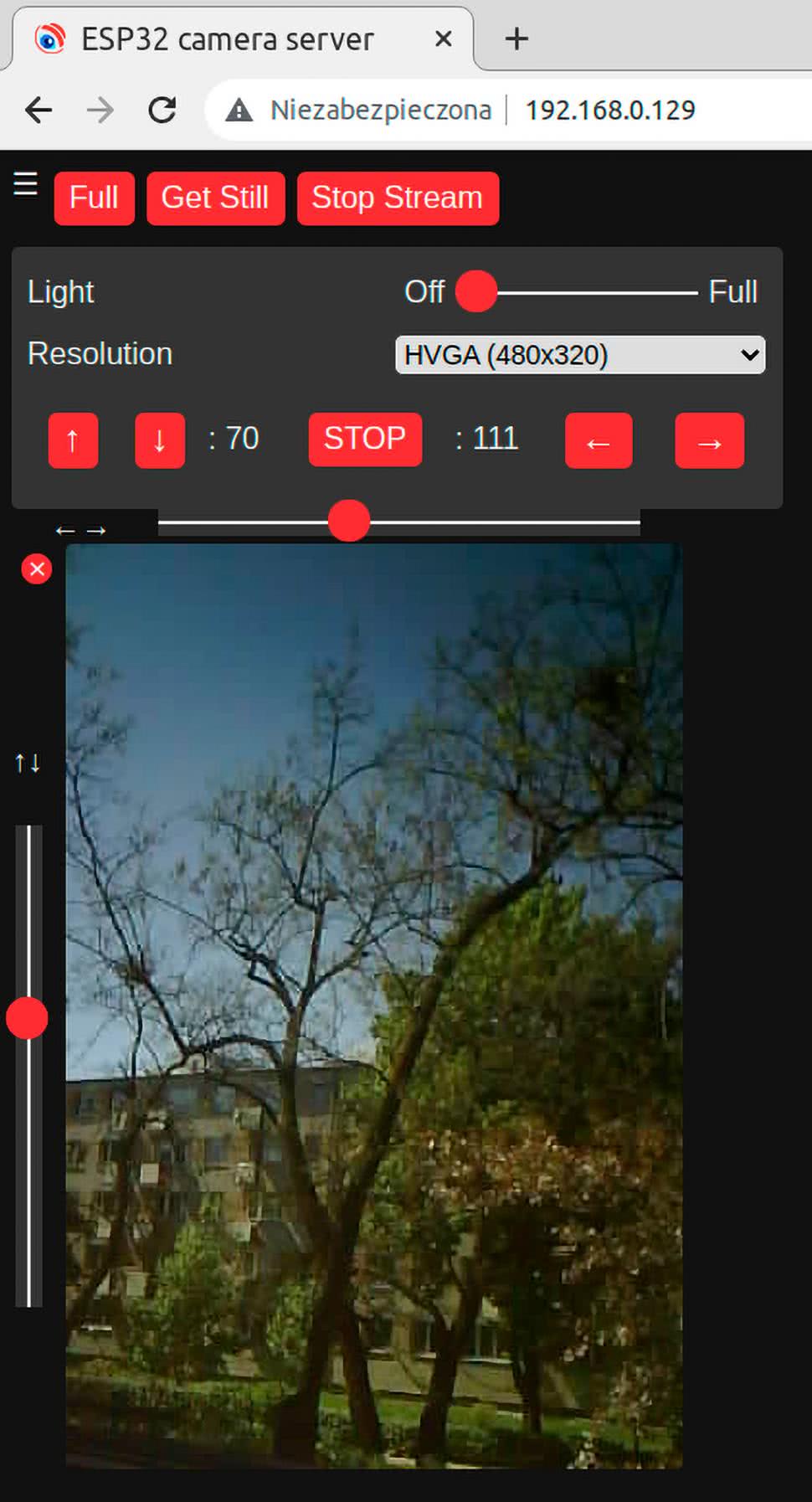
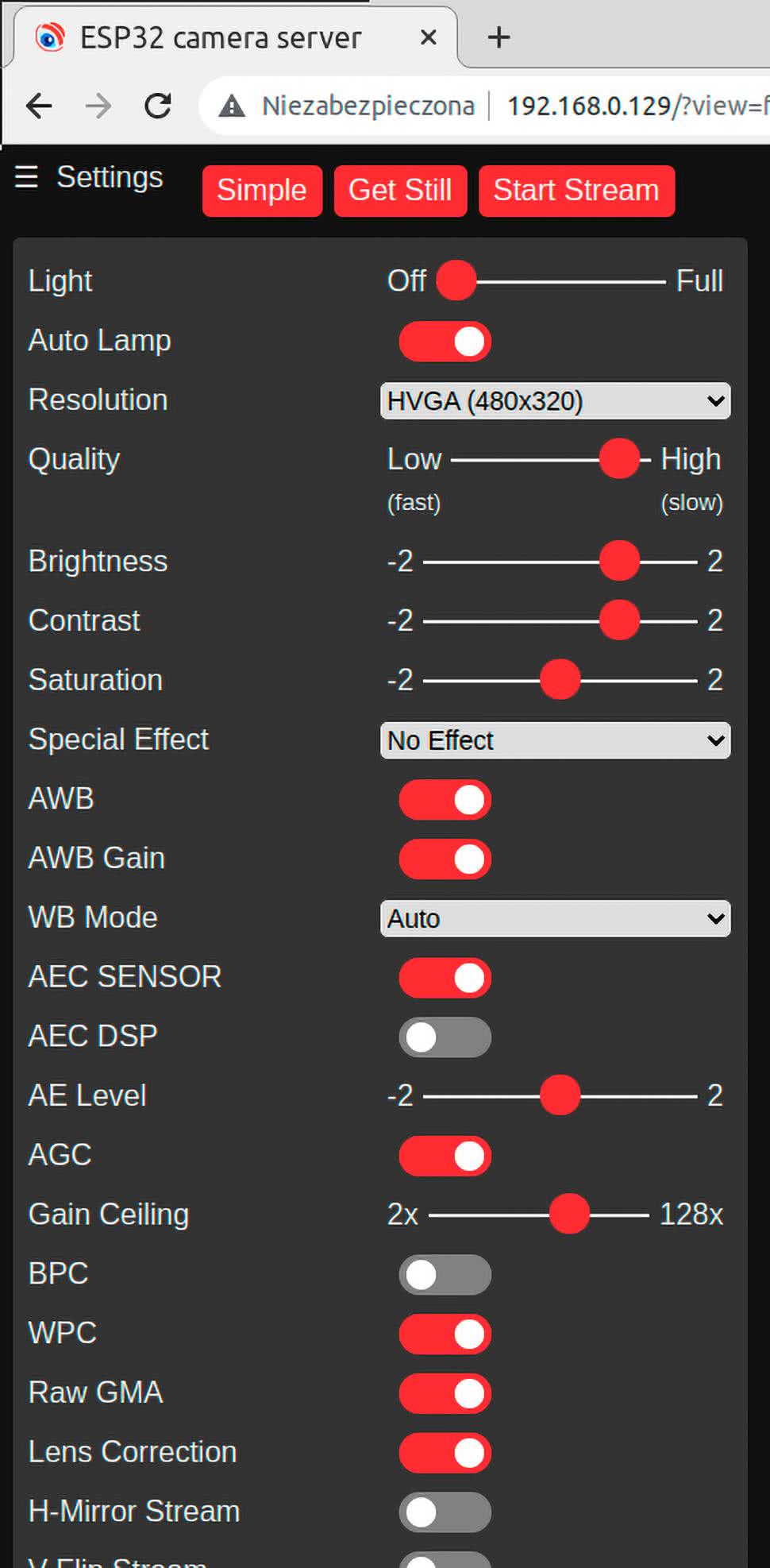
Klawisz Get Still powoduje kolejne wyświetlanie kilku ostatnich stop klatek. Klawisz Start/Stop Stream wznawia lub wstrzymuje transmisję strumieniową. Natomiast naciśnięcie przycisku Full spowoduje rozwinięcie ekranu z nastawami parametrów pracy kamery. Na samym dole listy nastaw dodano napis Servo będący linkiem do podstrony z ustawieniami związanymi z serwomechanizmami. W wersji obecnej można tam zaprogramować pozycję ramienia, którą przyjmie po resecie oraz ograniczenia jego ruchów w pionie i poziomie.
Dodatkową opcją jest możliwość sterowania kamerą i ramieniem przy pomocy rozkazów wpisywanych bezpośrednio w pasku przeglądarki i przesyłanych w trybie GET. Pozwala to tworzyć skrypty i zautomatyzować proces sterowania. Listę rozkazów można znaleźć tutaj [4].
Pliki źródłowe oprogramowania modułu dla środowiska Arduino można pobrać tu [5].
Przed zaprogramowaniem modułu zaleca się przeprowadzić kompilację z własnymi ustawieniami predefiniowanymi dla wybranego typu modułu. Dalszy opis dotyczyć będzie ESP32-CAM AI-THINKER z kontrolerem w wersji ESP32-S z dostępem do dodatkowej zamontowanej pamięci PSRAM.
Żeby móc przeprowadzić kompilację należy w środowisku Arduino mieć zainstalowaną obsługę modułów z procesorem ESP32. Jeżeli jeszcze tego nie zrobiłeś dodaj dodatkowy wpis w polu File → Preferences → Additional Board Manager URLs: https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json
Następnie przejdź do Tools → Boards → ESP32 Arduino i wybierz ESP32 Dev Module. Dla płytki ustaw parametry:
- CPU Frequency: 240 MHz
- Flash Mode: QIO
- Flash Size: 4 MB
- Partition Scheme: Minimal SPIFFS (1.9 MB APP with OTA/190 KB SPIFFS)
- PSRAM: Enabled
Wybierz w ustawieniach port USB do którego podłączony jest interfejs USB-Rx/Tx przy pomocy którego zaprogramujesz moduł ESP32-CAM. Pamiętaj żeby podłączyć:
- wyjście interfejsu Tx z UOR (GPIO3) modułu,
- wejście interfejsu Rx z UOT (GPIO1) modułu,
- zewrzyj wyprowadzenie GPIO0 modułu z GND,
- doprowadź do wejścia 5 V napięcie zasilania +5 V o wydajności prądowej zasilacza co najmniej 500 mA.
Pamiętaj żeby wyprowadzenia Tx i Rx interfejsu pracowały z sygnałami o maksymalnych poziomach 3,3 V. To ważne gdyż praca z wyższymi poziomami może uszkodzić moduł.
Zanim przejdziesz do kompilacji edytuj plik myconfig.h lub utwórz nowy o takiej nazwie korzystając z szablonu myconfig.sample.h. Jest to plik z predefiniowanymi ustawieniami użytkownika. Uzupełnij strukturę struct station stationList[] wpisując nazwę sieci (ssid) i hasło dostępu (password). Można podać 2 pary parametrów dostępu do jednej sieci lub więcej.
Po włączeniu zasilania moduł zacznie szukać sieci o nazwie z pozycji 2 lub kolejnych. Jeżeli żadnej nie znajdzie i nie będzie się mógł zalogować automatycznie przejdzie w tryb pracy punktu dostępowego i utworzy własną sieć o nazwie i haśle z pierwszego miejsca listy. Żeby tak się stało należy odkomentować pozycję #define WIFI_AP_ENABLE
Możesz także zmienić domyślny adres IP punktu dostępowego edytując pozycję #define AP_ADDRESS 192,168,4,1 (zwróć uwagę, że kolejne pozycje adresu IP w tej definicji są oddzielone znakiem przecinka).
Używając modułu AI-THINKER pamiętaj aby linia #define CAMERA_MODEL_AI_THINKER pozostała odkomentowana.
Prawdopodobnie przed kompilacją będziesz musiał w zwykły dla Arduino sposób doinstalować niektóre z wymienionych poniżej bibliotek:
AsyncTCP
ESPAsyncWebServer
AsyncElegantOTA
uTimerLib
W przypadku gdy moduł ESP32-CAM zalogował się do sieci, o jego numer IP w jej zasięgu należy odpytywać router zarządzający siecią. Po pierwszym zaprogramowaniu modułu, kolejne aktualizacje oprogramowania można już przeprowadzać zdalnie, drogą radiową korzystając z trybu OTA. Najpierw należy odpowiednio skompilować źródła oprogramowania korzystając z opcji Sketch → Export compilet binary. Po zakończeniu kompilacji w pasku przeglądarki wpisujemy adres IP modułu uzupełniony o numer portu 83 i rozkaz update np. tak: http://192.168.0.129:83/update
Gdy zgłosi się strona Elegant OTA należy wybrać opcję Firmware i wskazać lokalizację wygenerowanego podczas kompilacji pliku binarnego (jeżeli korzystamy ze szkicu Arduino o nazwie esp32-cam-pan-tilt.ino, plik będzie się nazywał esp32-cam-pan-tilt.ino.esp32.bin). Gdy wyświetli się informacja o sukcesie zdalnego zapisu należy nacisnąć przycisk Back i w pasku przeglądarki wpisać IP modułu bez numeru portu.
Bilans prądów
Moduł wraz z ramieniem zależnie od trybu pracy mogą pobierać różny, czasem znacząco wyższy prąd. Poniżej znajdują się wartości pomiarów dla różnych sytuacji przy zasilaniu napięciem 5 V:
- serwa w trybie oczekiwania: 6 mA,
- 1 serwo stabilne 2 pracuje: 12 mA,
- moduł transmituje strumień obrazów: ok. 180 mA,
- wstrzymana transmisja obrazu: 170 mA,
- transmisja obrazu, lampa LED włączona na max.: 330 mA.
Z pomiarów wynika, że zewnętrzny zasilacz powinien dostarczać stabilnego napięcia zasilania +5 V przy wydajności co najmniej 500 mA.
Ryszard Szymaniak
biuro@ars.info.pl
[1] https://bit.ly/3HIN7oC
[2] https://bit.ly/3yclMrv
[3] https://bit.ly/3xR4Bux
[4] https://bit.ly/3xNOFZR
[5] https://bit.ly/3ybyy9M
- R1: 1 kΩ
- R2: 30 kΩ
- R3: 50 kΩ
- R1: 2,2 kΩ
- C1: 10 μF SMD0805
- C2: 100 nF SMD0805
- C1: 100 nF SMD0805
- C2: 10 μF SMD0805
- C3, C4: 100 μF/25 V SMD
- D1: SMBJ5.0A dioda zabezpieczająca szybka
- M1: ESP32-CAM
- D1: 1N4007 SMD
- Q1: BC847 SMD
- J1, J2: DG308-2,54/3 złącze śrubowe do druku
- 2 × listwa gniazd goldpin 1×8
- K1: P-5 przekaźnik miniaturowy przewlekany
- J2: USB B-Mini gniazdo USB
- J5,J6: DG308-2.54/3 złącze śrubowe do druku
- J1: DG127-5.0/2 złącze śrubowe do druku
- J3, J3: styki kątowe goldpin 1×3
- uchwyt przegubowy do kamery FPV
- 2 × serwomechanizm SG90












