Zaloguj
Zaloguj




- odmierzanie czasu za pomocą specjalizowanego układu DS3231,
- automatyczne synchronizowanie zegara z czasem pobranym z serwera NTP,
- automatyczne przełączanie pomiędzy czasem letnim i zimowym,
- wyświetlacz na lampach Nixie typu IN4.
Konstrukcja urządzenia została ukierunkowana tak, aby zegar wyświetlał bardzo dokładny czas. Po włączeniu zasilania aktualny czas zostaje pobrany z układu DS3231, który jest podtrzymywany dodatkową baterią. Co dwanaście godzin czas zapisany w układzie RTC jest synchronizowany z czasem pobranym z serwera NTP, za co odpowiada moduł ESP01.
Budowa i działanie
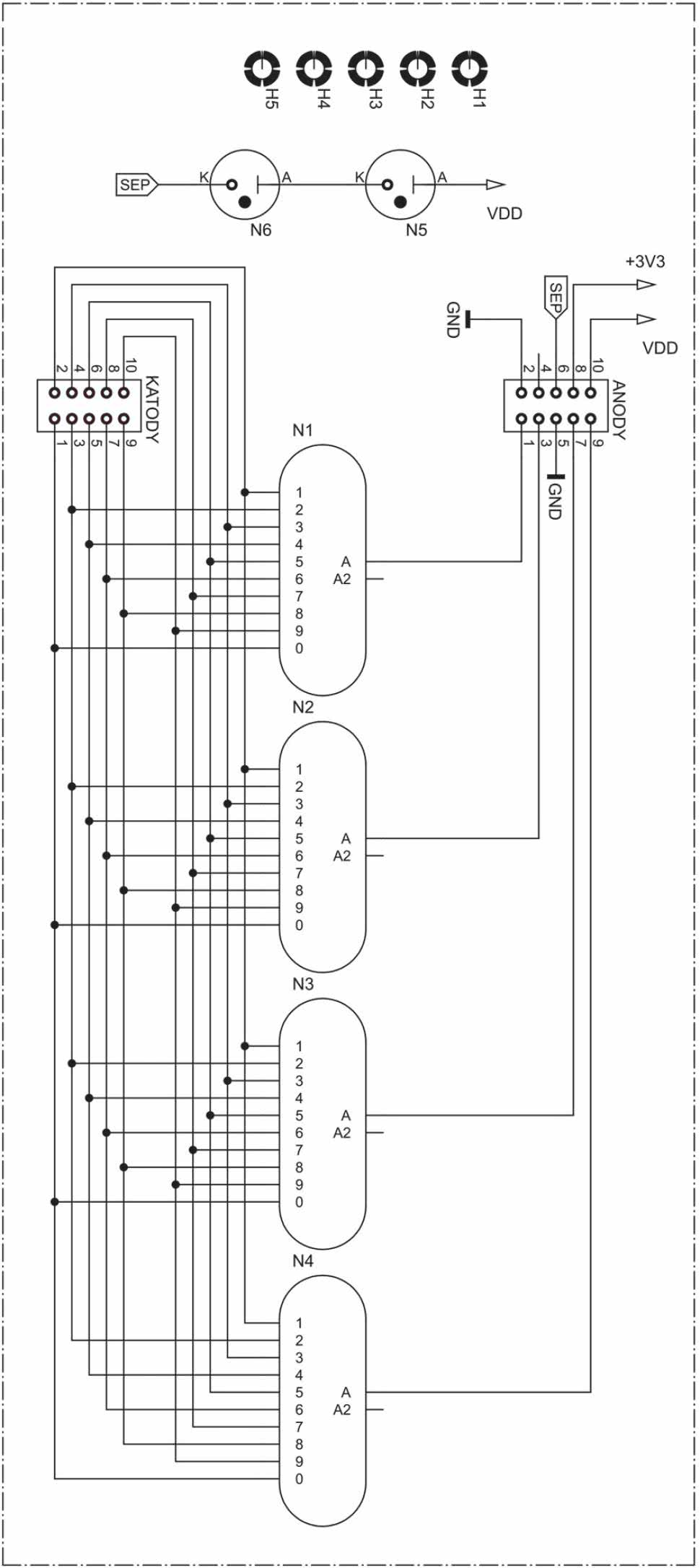
Schemat ideowy ma budowę modułową i składa się z czterech zasadniczych części. Pierwsza część to wyświetlacz, który wyświetla godzinę i minuty na czterech lampach Nixie IN4 (rysunek 1a).
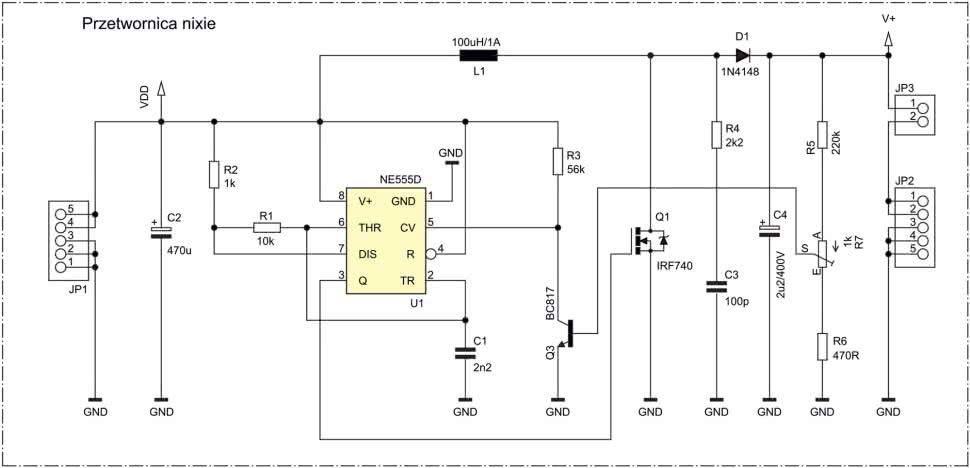
Drugą stanowi układ przetwornicy typu boost, podwyższającej napięcie, zbudowanej na bardzo popularnym timerze NE555 (rysunek 1b). Przetwornica w dużej mierze bazuje na projekcie pod tą samą nazwą, opisanym w książce pt. „100 projektów na 555”, autorstwa Krzysztofa Górskiego. Trzecia część to moduł Wi-Fi ESP826601 (rysunek 1c), zaprogramowany w ten sposób, że jeśli jest w stanie normalnej pracy, to co jedną sekundę wysyła ramkę danych, zawierającą aktualną datę, godzinę oraz dzień tygodnia. Dane pobierane są z serwera NTP.
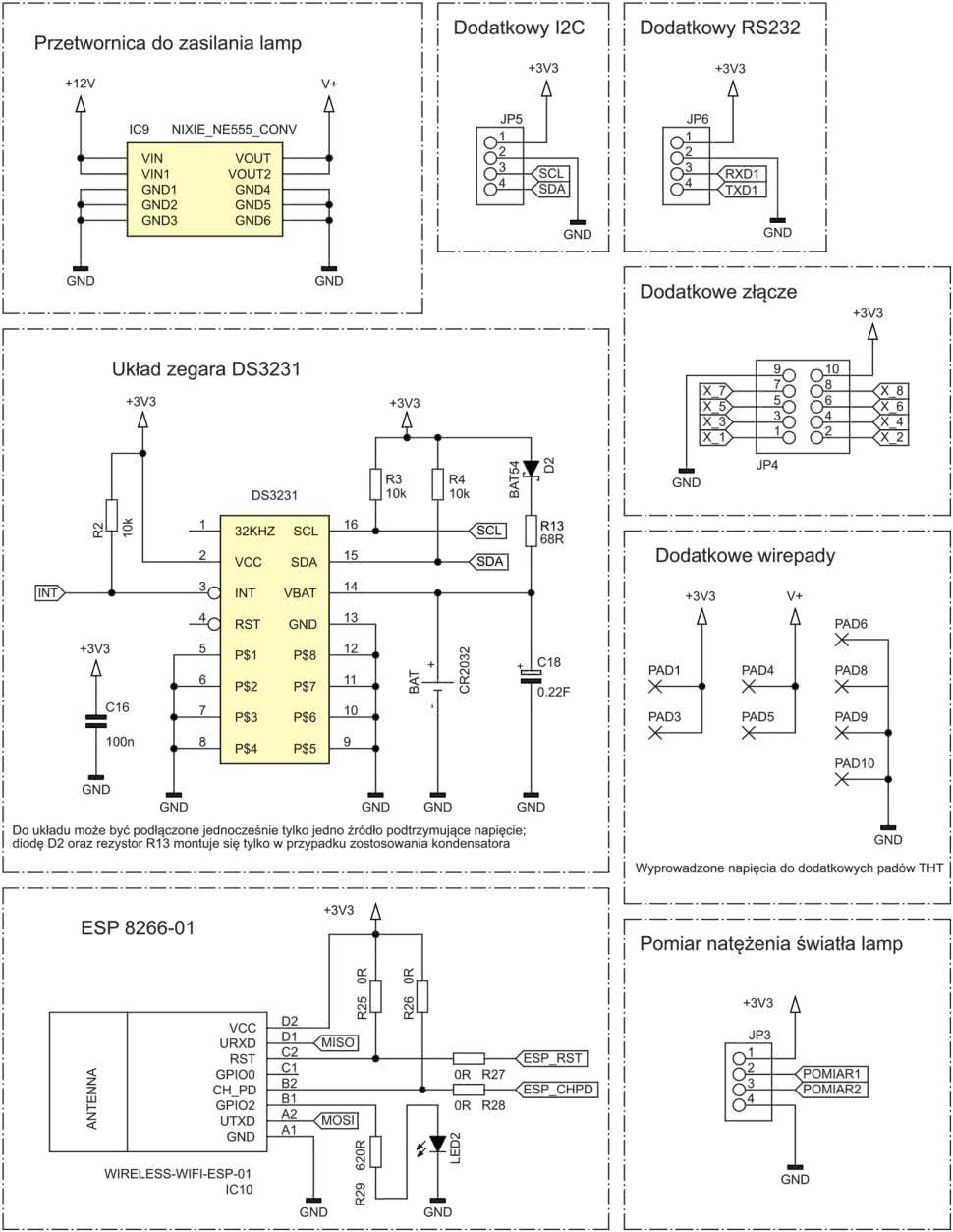

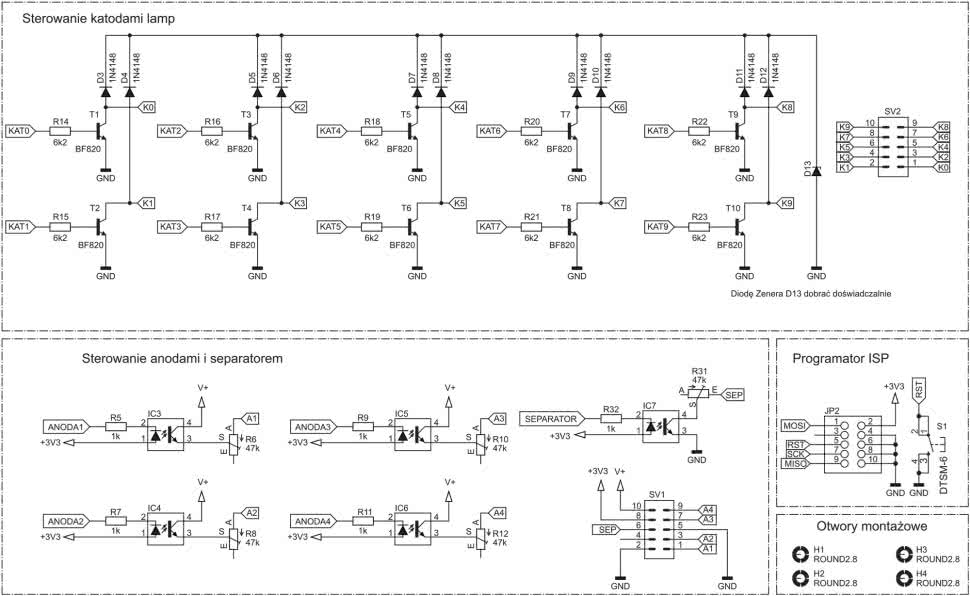
Wreszcie czwarta część, czyli płyta główna, do której moduły są podłączone (rysunek 1d i 1e). Na płycie umieszczony jest procesor ATmega128 z popularnej rodziny AVR, odpowiedzialny za sterowanie pozostałymi modułami. Część cyfrowa projektu zasilana jest napięciem 3,3 V, a zasilanie przechodzi przez zworkę JP1. Poza procesorem na płycie znajduje się układ zegara czasu rzeczywistego DS3231, tranzystory sterujące katodami lamp oraz transoptory sterujące anodami lamp.
Układ DS3231 to bardzo dokładny zegar czasu rzeczywistego, komunikujący się z głównym procesorem poprzez magistralę I2C. W momencie braku zasilania (np. przerwa w dostawie energii elektrycznej) układ jest podtrzymywany poprzez zewnętrzną baterię lub kondensator o wysokiej pojemności. W przypadku zastosowania kondensatora dodatkowo należy przylutować diodę D2 oraz rezystor R13. Do układu może być podłączone jednocześnie tylko jedno źródło podtrzymujące napięcie. Stąd płytka zaprojektowana jest w taki sposób, że nie ma możliwości jednoczesnego przylutowania baterii i kondensatora.
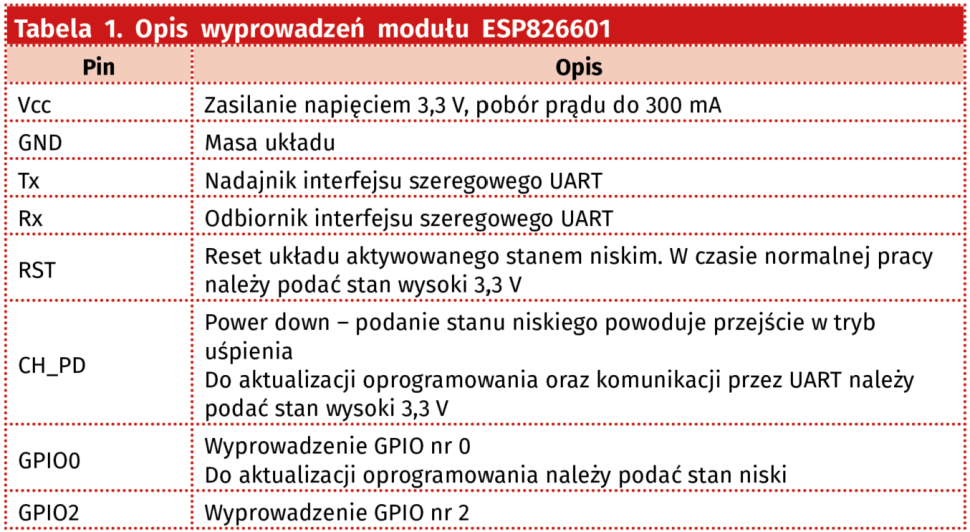
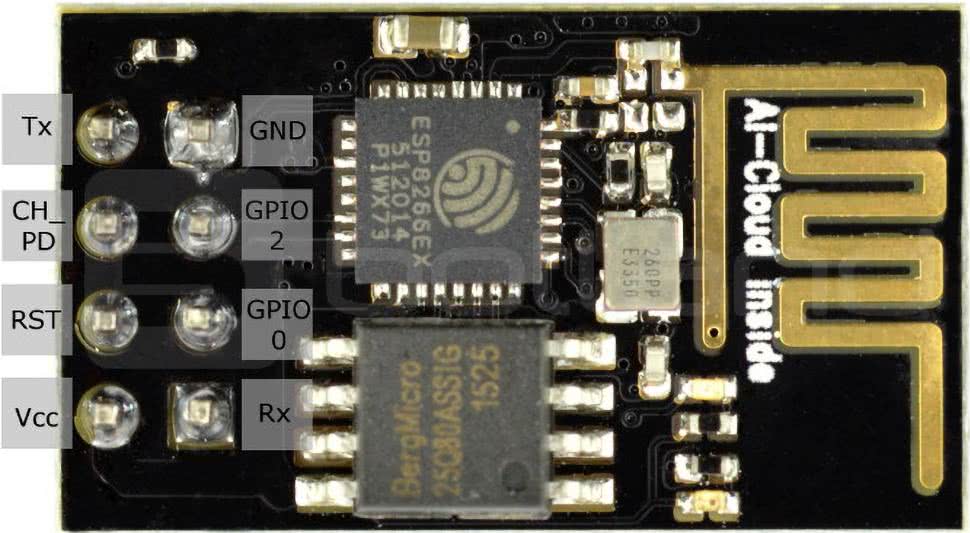
ESP826601 to moduł Wi-Fi działający w standardzie 802.11 b/g/n, na częstotliwości 2,4 GHz. Ma osiem wyprowadzeń w rastrze 2,54 mm oraz antenę umieszczoną na płycie PCB modułu. Jak pokazuje schemat, do wyprowadzeń modułu dołączone są rezystory R25...R28 umożliwiające wybranie odpowiedniego trybu pracy. Aby synchronizować czas co określone przedziały czasowe, należy przylutować tylko rezystory R27 oraz R28 (ustawienie domyślne). Jeżeli zamiast tych rezystorów zostaną zamontowane rezystory R25 i R26, moduł będzie na stałe połączony z siecią Wi-Fi. Nie ma konieczności montowania diody LED2. Warto nadmienić, że w czasie regularnej pracy pobór prądu przez ESP01 może wynosić nawet 300 mA. Procesor IC2 (ATmega128) komunikuje się z tym modułem poprzez interfejs UART, czyli sygnałami RX i TX (parametry komunikacji 115200, 8, n, 1). Opis wyprowadzeń modułu został pokazany w tabeli 1 oraz na rysunku 2.
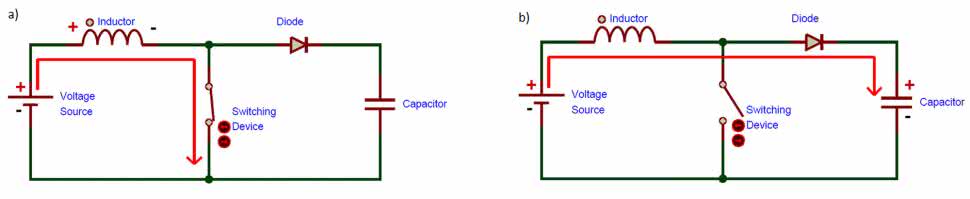
Przetwornica typu boost wytwarza wysokie napięcie odpowiednie dla anod lamp. Kluczowymi elementami są: tranzystor MOSFET, cewka o wartości 100 mH i prądzie co najmniej 1 A oraz dioda prostownicza. Działanie układu podwyższającego napięcie polega na cyklicznym załączaniu tranzystora. W momencie kiedy tranzystor jest włączony (rysunek 3a), na cewce L odkłada się napięcie stałe, uzyskane z napięcia wejściowego, a prąd płynący przez cewkę zaczyna narastać.
Dioda jest spolaryzowana w kierunku zaporowym i nie przewodzi – jej anoda jest podłączona do masy układu. W chwili gdy tranzystor zostaje wyłączony (rysunek 3b), prąd cewki jest większy od zera. Strumień magnetyczny indukuje w cewce napięcie o takiej wartości, aby umożliwić dalszy przepływ prądu do obciążenia. Kiedy wartość prądu płynącego przez cewkę będzie równa zeru, dioda przestaje przewodzić, więc energia zgromadzona w cewce nie będzie przekazywana do obciążenia. Ten stan potrwa do czasu ponownego załączenia tranzystora.
Oprogramowanie modułu ESP
Kod odpowiedzialny za pobieranie danych z serwera NTP (Network Time Protocol) i wysłanie ich na port szeregowy został pokazany na listingu 1. Program napisano w języku C, w środowisku Arduino. W dużej mierze przemawiała za tym łatwość w dostępie do bibliotek oraz szybki sposób przygotowania środowiska do programowania konkretnego modułu. Na samym początku należy podać nazwę sieci Wi-Fi oraz hasło do niej. W zależności od obecnie obowiązującego czasu (letni/zimowy) należy odkomentować odpowiednią linię ze zmienną time_zone. Wartość 3600 (czas zimowy) lub 7200 (czas letni) oznacza różnicę w milisekundach od czasu wzorcowego UTC. Kolejnym elementem kodu są deklaracje zmiennych przechowujących czas i datę. Są to zmienne typu string oraz int. Potem ustawiana jest odpowiednia prędkość interfejsu UART i połączenie z siecią Wi-Fi.
W pętli głównej programu już w pierwszych liniach kodu uzyskujemy interesujące nas informacje, tj. datę oraz godzinę. W tak podstawowej formie można by już to zostawić, ale chcąc w pełni zautomatyzować urządzenie, trzeba uwzględnić zmianę czasu z zimowego na letni w marcu i letniego na zimowy w październiku. Zmiana czasu odbywa się w niedzielę, więc trzeba uwzględnić także dzień tygodnia. Zostanie on obliczony, ale w pierwszej kolejności z odebranego łańcucha tekstowego należy wyselekcjonować interesujące nas dane, czyli: dzień, miesiąc, rok oraz godzinę i zamienić je na typ całkowity int. Na podstawie dnia, miesiąca oraz roku, korzystając z tzw. algorytmu Zellera, można obliczyć numer dnia tygodnia. Po wywołaniu funkcji zeller() otrzymuje się dzień tygodnia w formie: 0 – niedziela, 1 – poniedziałek, …, 6 – sobota.
W dalszej części programu, w funkcji ChangeTime(), sprawdzana jest aktualna data wraz z dniem tygodnia. Na tej podstawie ustawia się obowiązującą strefę czasową. W miesiącach styczeń, luty, kwiecień…wrzesień oraz grudzień sprawa jest prosta. Nie ma wtedy zmiany czasu, dlatego strefa czasowa pozostaje ta sama. Sposób sprawdzania i zmiany czasu w marcu i październiku jest bardzo podobny, więc omówiona zostanie tylko zmiana czasu z zimowego na letni. Zmiana czasu nie odbywa się tego samego dnia co roku. Dla wyznaczenia właściwego dnia należy spełnić kilka warunków: miesiącem musi być marzec; dzień miesiąca musi być większy od 24; dniem tygodnia musi być niedziela, a godzina, w jakiej nastąpi zmiana, to 2.00. Wydaje się, że należy postawić warunek:
if(month==3 && day_of_month>24 && day_of_week==0 && hour>=2) time-zone = 7200
Nastąpiła zmiana czasu i wszystko jest w porządku. Tylko do rozważenia zostaje jedna rzecz: zakładając, że 20 marca uruchomiono moduł, zmiana czasu nastąpiła w niedzielę, 26 marca, z godziny 2.00 na 3.00, a 27 marca nastąpiła chwilowa przerwa w dostawie energii elektrycznej na jedną minutę i po jej upływie moduł się włącza. Co pojawi się na terminalu w takim przypadku? Po włączeniu, na terminalu, mimo obowiązującego już czasu letniego, pojawi się czas zimowy. Kiedy skończy się marzec i miną 4 dni, wszystko wróci do normy, czas zmieni się na właściwy.
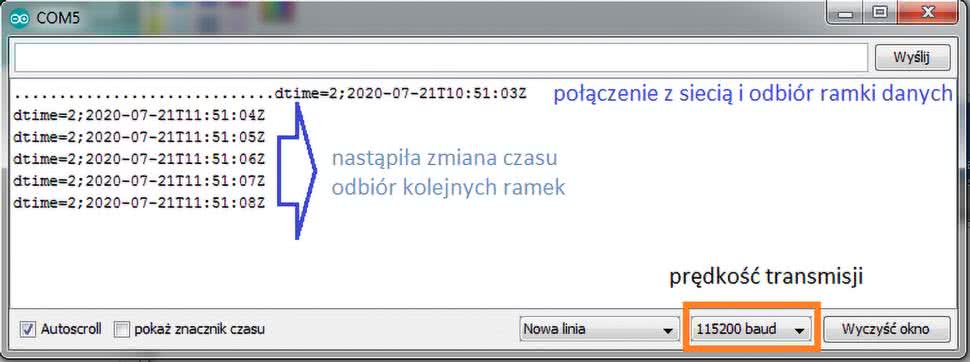
W celu zapobieżenia tej sytuacji awaryjnej użyto pętli do…while. W pętli tej następuje sprawdzanie, czy nie nastąpiła przerwa w dostępie do Internetu, w dostawie energii lub inny przypadek. W pierwszej iteracji pętli sprawdza się, czy dzień miesiąca jest większy od 25 oraz czy nastąpił poniedziałek, po ostatniej niedzieli marca. W kolejnej iteracji sprawdza się, czy dzień miesiąca jest większy od 26 oraz czy nastąpił wtorek po ostatniej niedzieli marca. W kolejnych iteracjach pętli wykonywane jest analogicznie dalsze sprawdzanie, aż do końca miesiąca. Jeśli warunek, który jest sprawdzany w pętli, jest prawdziwy, to następuje zmiana czasu, czyli czas zmienia się z zimowego na letni. Wygląd odebranych ramek danych w terminalu pokazuje rysunek 4.
Oprogramowanie procesora ATmega128
Mikrokontroler jest taktowany zewnętrznym rezonatorem 11,0592 MHz. Program sterujący jego pracą został napisany w języku C, w środowisku Eclipse. Ustawiając fusebity, oprócz wyboru taktowania procesora i wyłączenia interfejsu JTAG, należy także wyłączyć fusebit m103c (m103=1), ponieważ domyślnie jest kompatybilny z procesorem ATmega103. Działanie programu jest oparte na przerwaniach. Częstotliwość taktowania została tak dobrana, aby uzyskać małą ilość błędów transmisji interfejsu UART, przy prędkości dopasowanej do modułu Wi-Fi. Do obsługi interfejsów I2C (komunikacja z układem RTC DS3231) oraz UART (komunikacja z modułem Wi-Fi ESP8266-01) zastosowano biblioteki z książki Mirosława Kardasia pt. „Język C. Pasja programowania mikrokontrolerów 8-bitowych”.
Funkcję konfigurującą układ DS3231 do pracy pokazuje listing 2. Po ustawieniu częstotliwości magistrali na 100 kHz należy wyzerować bit INTCN w rejestrze Register Control układu RTC. Ponieważ pozostałe bity tego rejestru także są równe zero, można wyzerować cały rejestr. Po wyzerowaniu rejestru na wyjściu INT/SQW pojawi się przebieg o częstotliwości 1 Hz, co zostało wykorzystane przy konfiguracji układu czasowego Timer0, który będzie zgłaszał przerwanie od układu RTC co jedną sekundę. Dane przedstawiające czas wpisuje się do układu poprzez wysłanie ich do odpowiednich rejestrów w kodzie BCD przez magistralę I2C.
Biblioteka do obsługi UART została nieco zmodyfikowana w celu obsługi procesora ATmega128. Zmiany, jakie wykonano w pliku mkuart.c, to m.in. modyfikacja przerwania nadawczego i odbiorczego. Wszystkie modyfikacje zostały uwzględnione w kodach źródłowych dołączonych do materiałów dodatkowych do tego projektu. Funkcja inicjująca interfejs UART, gdzie ustawione są parametry ramki danych oraz włączony nadajnik i odbiornik poprzez ustawienie odpowiednich bitów w rejestrach mikrokontrolera, została pokazana na listingu 3. Samego modułu ESP nie trzeba konfigurować do pracy. Zostaje on wybudzony, gdy na jego wejściu CH_PD pojawi się stan wysoki. W przeciwnym razie układ jest w stanie uśpienia.
Kolejna funkcjonalność to konfiguracja i przygotowanie do pracy wyświetlacza lampowego. Wyświetlanie czasu na wyświetlaczu odbywa się poprzez multipleksowanie lamp z odpowiednią częstotliwością dobraną tak, aby pozbyć się efektu migotania i efektu duchów. Procedura obsługi przerwania od Timer2 korzysta z instrukcji switch…case, jej kod został pokazany na listingu 4. Anody lamp są cyklicznie załączane, a czas jest wyświetlany poprzez wysterowanie katod. Na samym początku, w pierwszym przerwaniu wszystkie anody są wyłączone. W kolejnym przerwaniu załącza się pierwszą anodę i wynik prezentowany jest na katodach. W następnym kroku pierwsza anoda jest wyłączona. Kiedy nadejdzie następne przerwanie, załączana jest druga anoda, a czas wyświetlany jest na katodach. Potem anodę się wyłącza i przy kolejnych lampach proces wygląda analogicznie do opisanego. Lampy więc załączane są de facto co drugie przerwanie.
Odbiór danych z modułu Wi-Fi odbywa się przez tzw. zdarzenia. Oznacza to, że przerwanie nastąpi w momencie nadejścia ramki danych. Ramka danych (zapisywana w zmiennej buf) ma postać taką jak na rysunku 4 i jest to zmienna typu string. W celu użycia tych danych należy przychodzący string rozbić na tzw. tokeny i wyodrębnić z niego zmienne, a następnie wysłać je do układu RTC. Odpowiedni kod zawarty jest na listingu 1. Dla otrzymania dni tygodnia z ramki danych należy uzyskać string bez frazy dtime=. Wykonujemy to poprzez zastosowanie funkcji strncasecmp(). Otrzymujemy wtedy zmienną bez pierwszych sześciu znaków. Następnie wyodrębniamy dzień tygodnia do osobnej zmiennej (nadal typ string) poprzez użycie funkcji strtok(), która wyszukuje znak wpisany do drugiego argumentu funkcji, ze zmiennej podanej jako pierwszy argument, i w to miejsce wstawia zero (NULL). Po kolejnym wywołaniu funkcji, do zmiennej esp_dayofweek zapisuje się dzień tygodnia. Dalsze instrukcje pokazują wyodrębnienie zmiennych wyrażających godzinę, minutę i sekundę. Funkcja atoi() zamienia dane typu ASCII na INT. Uzyskane zmienne, jako typ liczbowy, zapisuje się w pamięci układu RTC.
Główna funkcja programu nie zawiera wielu linii kodu. Na samym początku ustawia się przedział czasu, co jaki ma być synchronizowany układ DS3231. Dokładnie co jedną sekundę, na podstawie przerwania od układu DS3231, odczytuje się dane i wyświetla na wyświetlaczu, za co odpowiada funkcja show_time().
Montaż i uruchomienie
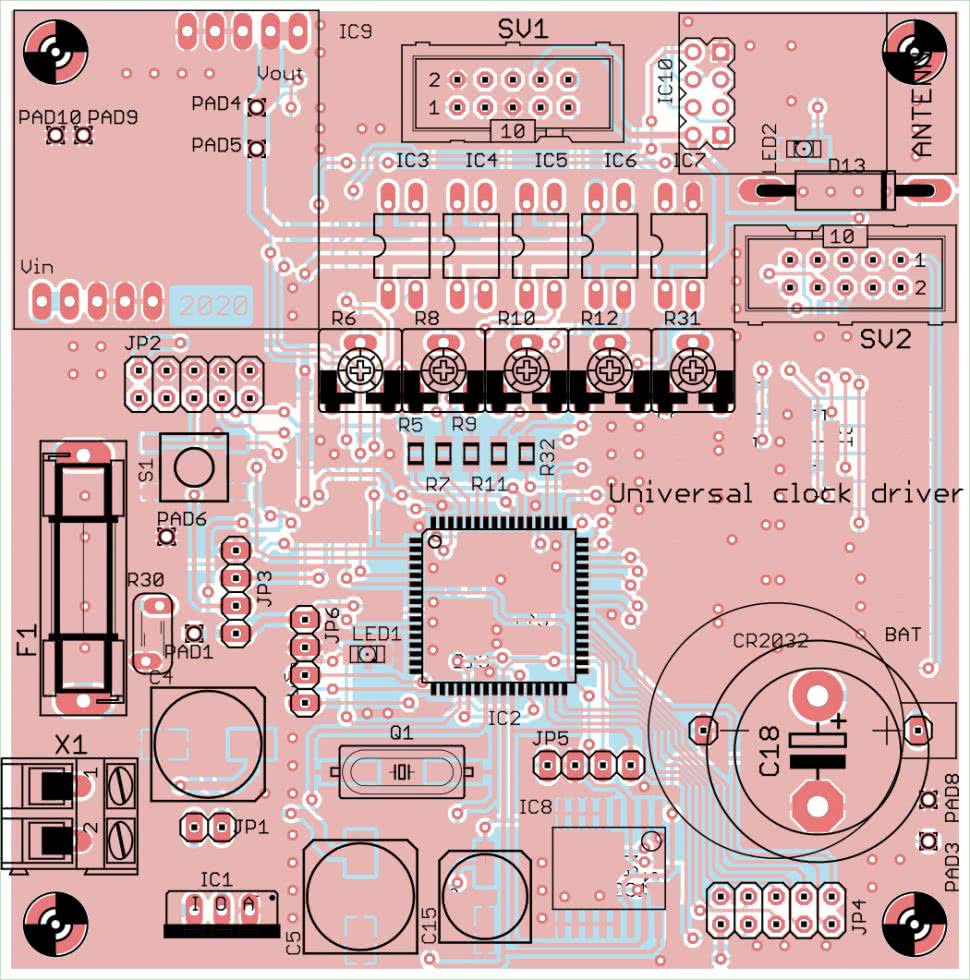
Schematy płytek drukowanych zostały pokazane na rysunkach 6, 7, 8. Lutowanie komponentów zaczyna się w sposób standardowy, zaczynając od tych najmniejszych, czyli rezystorów i kondensatorów SMD. W następnej kolejności należy zamontować układy scalone (IC2, IC8), a na koniec potencjometry, transoptory i złącza THT. Mimo że na płytce jest wiele padów na komponenty, to nie ma konieczności montowania ich wszystkich. Elementy niezbędne do działania znajdują się w wykazie elementów.
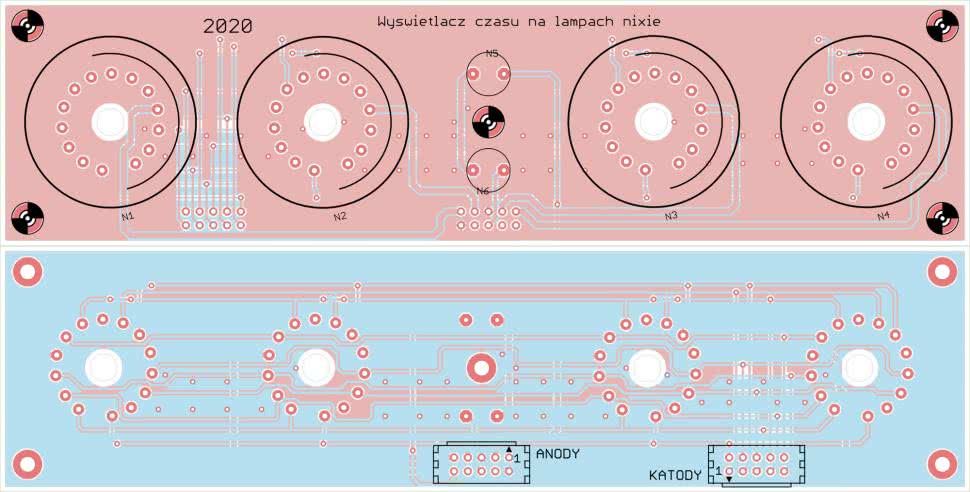

Na płycie wyświetlacza, pod lampami, zastosowano piny montażowe, ale równie dobrze można zastosować piny z różnego rodzaju złączy, np. LPT DB25.
Szczególną ostrożność należy zachować przy lutowaniu elementów przetwornicy, a jej uruchamianie najlepiej przeprowadzić poza układem, ponieważ wyprostowane napięcie wyjściowe, w zależności od ustawień potencjometru, może wynieść nawet 300 V.
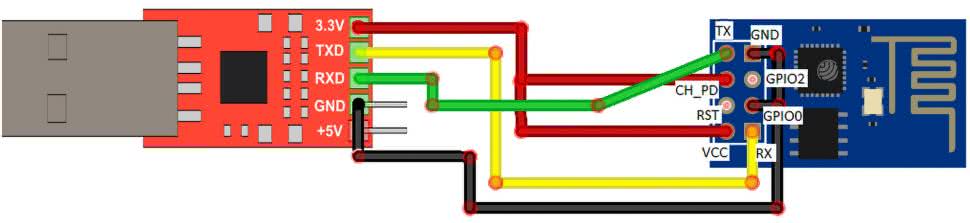
Przed programowaniem modułu ESP826601 należy zainstalować sterowniki USBUART oraz zmontować układ, umożliwiający zaprogramowanie modułu (rysunek 5), albo użyć gotowej przejściówki. Na czas programowania modułu trzeba zewrzeć wyjście GPIO0 z masą modułu. Poprawność wgrania programu można zobaczyć poprzez podgląd odbieranych ramek danych w dowolnym terminalu (np. terminal Arduino, PuTTY, itp.)
Kolejnym krokiem jest zaprogramowanie procesora AVR. Potrzebny będzie programator ISP, który należy podłączyć do złącza JP2. Do procesu programowania używa się tych samych wyjść procesora, których używa on przy komunikacji z modułem ESP01. Dlatego na czas programowania procesora moduł Wi-Fi powinien znajdować się poza płytką główną.
Nie ma konieczności lutowania diody LED1. Została ona umieszczona na płytce w celu sprawdzania odbierania danych z interfejsu I2C. Miga co jedną sekundę z każdym nadchodzącym przerwaniem.
Diody D3...D13 zostały zamontowane w celu sprzętowej eliminacji efektu duchów lamp. Dioda Zenera D13, w docelowym układzie, pracuje przy napięciu 65 V, ale w zależności od typu lamp można ją dobrać doświadczalnie. Przy pierwszym uruchomieniu pomocne będą zworki, przez które podaje się napięcia zasilające.
Podczas uruchamiania prototypu zdarzało się, że po kilku godzinach działania występowało dziwne zjawisko – cyfra wyświetlająca na lampie godziny przeskakiwała godzinę do przodu lub do tyłu. Rozwiązaniem problemu było dolutowanie kondensatora ceramicznego przy wyprowadzeniach zasilających procesora. Początkowa wersja projektu nie zapewniała odpowiedniej filtracji zasilania. Wersja docelowa jest wolna od tej wady. Zmontowane płytki umieszczone w stylowej drewnianej obudowie pokazują fotografie 1 i 2.


Podsumowanie
Płytka główna zegara została zaprojektowana z myślą o różnych rozwiązaniach rozwojowych. Po zmianach w programie można zastosować inny typ wyświetlacza (TFT, OLED), łącząc go przez wyprowadzone piny. Dzięki zastosowaniu dołączanej przetwornicy można użyć wyświetlacza zasilanego z innego napięcia. Poprzez wyprowadzenia z przetwornika analogowo-cyfrowego, umieszczone na płycie, można mierzyć natężenie światła wyświetlacza i na tej podstawie programowo regulować jasność jego świecenia. Można także wykorzystać sam moduł Wi-Fi, wysyłający komplet danych z godziną, datą oraz dniem tygodnia do własnego projektu, który będzie potrzebował tych danych. Niekoniecznie musi to być zegar.
Mateusz Kuliński
mateuszkulinski01@gmail.com
- R1…R4: 10 kΩ SMD0603
- R24, R29: 620 Ω SMD0603 (nie montować)
- R13: 68 Ω SMD0603 (montować w przypadku montażu kondensatora C18)
- R25, R26, R27, R28: 0 Ω SMD0603 (montować tylko R27 i R28)
- R14…R23: 6,2 kΩ SMD0603
- R5, R7, R9, R11, R32: 1 kΩ SMD0603
- R6, R8, R10, R12, R31: 47 kΩ potencjometry
- C1…C3, C6, C9…C14, C16: 100 nF SMD0603
- C4: 47 μF/16 V
- C5, C15: 10 μF/16 V
- C7, C8: 10 pF SMD0603
- C18: 0,22 F superkondensator (w przypadku rezygnacji z baterii)
- LED1, LED2: SMD1206 zielona
- D1, D3…D12: 1N4148 SMD
- D2: BAT54 SOT23 (w przypadku montażu kondensatora C18)
- D13: dioda Zenera 65 V typu C1702-15 65V
- T1…T10: BF820 (SOT23)
- IC1: LD1117V33 (TO220)
- IC2: ATmega128 (TQFP64)
- IC3…IC7 TLP627 (DIL04)
- IC8: DS3231 (SO16W)
- IC10: moduł Wi-Fi ESP-01
- F1: 800 mA SH22,5
- R30: warystor
- L1: 10 μH dławik L3230M
- Q1: kwarc 11,0592 MHz SM49
- S1: switch resetujący DTSM-6
- JP1: goldpin 1×2
- JP2: goldpin 2×5
- JP3: goldpin 1×4
- JP4: goldpin 2×5
- JP5: goldpin 1×4
- JP6: goldpin 1×4
- SV1, SV2: goldpin 2×5
- R1: 10 kΩ SMD0603
- R2: 1 kΩ SMD0603
- R3: 56 kΩ SMD0603
- R4: 2,2 kΩ SMD0603
- R5: 220 kΩ SMD0603
- R6: 470 Ω SMD0603
- R7: 1 kΩ potencjometr
- C1: 470 μF 5 mm THT
- C2: 2,2 nF SMD0603
- C3: 100 pF SMD0603
- C4: 2,2 μF/400 V 5 mm THT
- D1: 1N4148
- Q1: IRF740 (TO220)
- Q3: BC817 (TO92)
- U1: NE555
- L1: 100 μH/1 A 10 mm THT co najmniej 1 A
- JP1, JP2: goldpin 1×5
- JP3: goldpin 1×2
- N1…N4: lampa Nixie IN-4 + podstawki pod lampy
- N5, N6: separator INS-1
- J1, J2: goldpin 2×5