 Zaloguj
Zaloguj



- współpracuje ze specjalizowanym darmowym oprogramowaniem odtwarzacza muzycznego, na przykład Volumio,
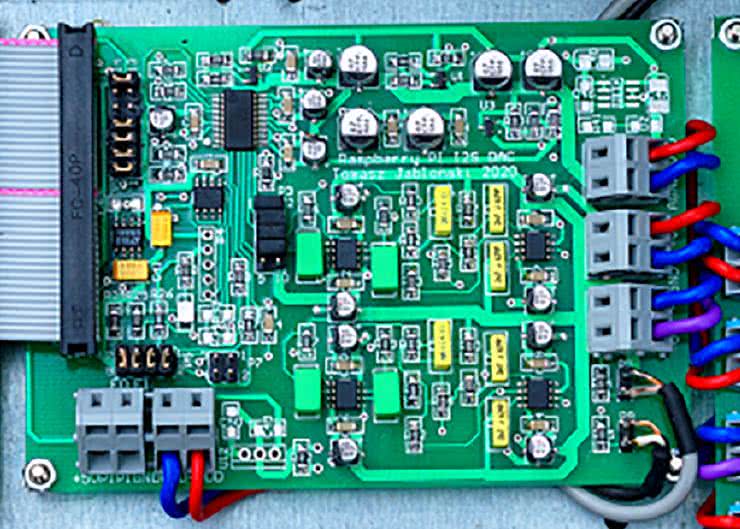
- przetwornik DAC typu PCM1794A firmy Texas Instrument,
- zakres dynamiki 127 dB dla sygnału stereo, zniekształcenia THD+N 0,0004%, rozdzielczość 24 bity,
- przesyłanie danych audio z odtwarzacza cyfrowego do przetwornika poprzez interfejs I2S,
- układ przetwornika i komputerka z osobnymi zasilaczami liniowymi.
Zasilanie układu PCM1794A
Przetwornik ma rozdzielone zasilanie części cyfrowej i analogowej. Dotyczy to zarówno masy, jak i wejść zasilających. Układy cyfrowe są zasilane napięciem 3,3 V ze scalonego stabilizatora U9 LT1763. Jest to niskoszumowy stabilizator LDO o wydajności prądowej 500 mA. Do zasilania układów cyfrowych nie jest niezbędny stabilizator niskoszumowy, ale nic nie stoi na przeszkodzie, aby taki zastosować. Napięcie 3,3 V na szynie VDD, zasilające układ DAC, jest filtrowane parą kondensatorów: elektrolitycznym o niskim ESR: C19 10 μF/16 V i ceramicznym 100 nF. Kondensatory są umieszczone na płytce drukowanej jak najbliżej wejść zasilających VDD i DGND. Tym samym napięciem, filtrowanym ceramicznym kondensatorem C51 o pojemności 100 nF, jest również zasilany układ U7 ICS570B.
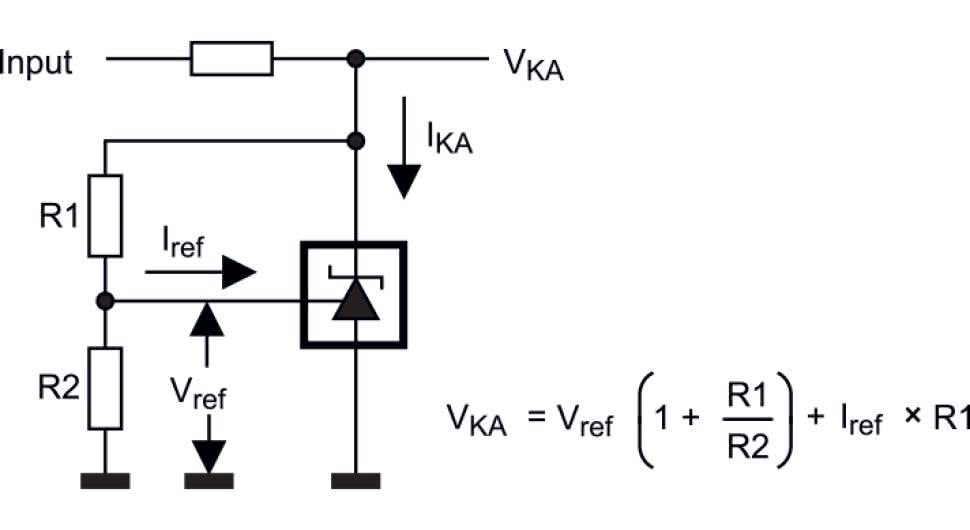
W części analogowej zastosowałem nietypowe zasilanie. Układ PCM1794A ma wyprowadzone osobne zasilanie części analogowej kanału lewego VCCL, kanału prawego VCCR oraz wspólnej części analogowej VCC1. Postanowiłem zasilić każde z tych wyprowadzeń z osobnego układu stabilizatora. Do stabilizacji użyłem stabilizatora parametrycznego z rezystorem szeregowym i układem TL431 (shunt regulator). Zasadę działania układu stabilizacji z TL431 pokazuje rysunkek 5.
Układ TL431 jest źródłem napięcia odniesienia o stosunkowo małych szumach i działaniu podobnym do diody Zenera o typowym napięciu referencyjnym Vref równym 2,45 V. Wartość napięcia wyjściowego jest ustalana przez dwa rezystory: R1 i R2, według zależności z rysunku 5. Jeżeli przyjmiemy, że prąd Iref jest pomijalnie mały, a wartości rezystorów R1 i R2 wynoszą 1 kΩ, to napięcie na diodzie będzie miało wartość 2×Vref.

W naszym układzie napięcie wyjściowe będzie miało wartość ok. 4,9 V, a płynący prąd powinien mieć wartość do 100 mA. Znając te parametry, wartość napięcia wejściowego i zakres prądu pobieranego przez obciążenie, możemy wyliczyć wartość i moc rezystora szeregowego. Na rysunku 6 pokazano układ zasilania sekcji analogowej kanału lewego PCM1794A. Na szynie zasilającej VCC2L jest napięcie o wartości ok. 4,9 V. Przy takim zasilaniu trzeba pamiętać, że napięcie pomiędzy trzema wejściami zasilania układów analogowych nie może się różnić o więcej niż 0,1 V.
Tego typu stabilizatory mają bardzo małą sprawność energetyczną. Prąd płynący przez rezystor szeregowy, od źródła napięcia do obciążenia, nie zmienia się, niezależnie od prądu pobieranego przez obciążenie. Jeżeli prąd obciążenia maleje, to rośnie prąd płynący przez stabilizator, w naszym przypadku TL431. Jakość stabilizacji zależy głównie od rezystancji dynamicznej diody. Dla TL431 wynosi ona typowo 0,2 Ω, czyli w porównaniu z klasycznymi diodami Zenera zupełnie nieźle. Wydawałoby się, że stosowanie takiego układu zasilania w czasach, kiedy mamy do dyspozycji scalone niskoszumowe stabilizatory LDO z układami wzmacniacza błędu, nie ma większego sensu. Jednak okazuje się, że obwody analogowe przetwornika pobierają w miarę stały i niezbyt duży prąd, więc technicznie takie układy stabilizacji będą poprawnie pracowały. Poza tym, według subiektywnych opinii, tego typu zasilanie powoduje, że dźwięk z przetwornika jest wyczuwalnie inny, w domyśle lepszy. Dodatkowo, oddzielne zasilanie kanałów lewego i prawego przyczynia się do lepszej separacji kanałów. Ponieważ w trakcie projektowania urządzenia nie byłem do końca przekonany do tego rozwiązania, umieściłem na płytce miejsce dla stabilizatora niskoszumowego U11 typu LT1763 5.0, o napięciu wyjściowym 5 V, z możliwością zasilania układów analogowych napięciem 5 V z tego źródła. W prototypie układy analogowe PCM1794A są zasilane przez stabilizatory TL431, a układ U11 nie został zamontowany. Źródłem napięć niestabilizowanych dla stabilizatorów 3,3 V części cyfrowej oraz stabilizatorów shunt 5 V części analogowej jest osobny moduł zasilacza, opisany dalej.
Konwerter prąd-napięcie
Prądowe sygnały różnicowe IOUT– i IOUT+ z wyjść przetwornika są konwertowane na sygnały napięciowe przez układ oparty na niskoszumowym wzmacniaczu operacyjnym.
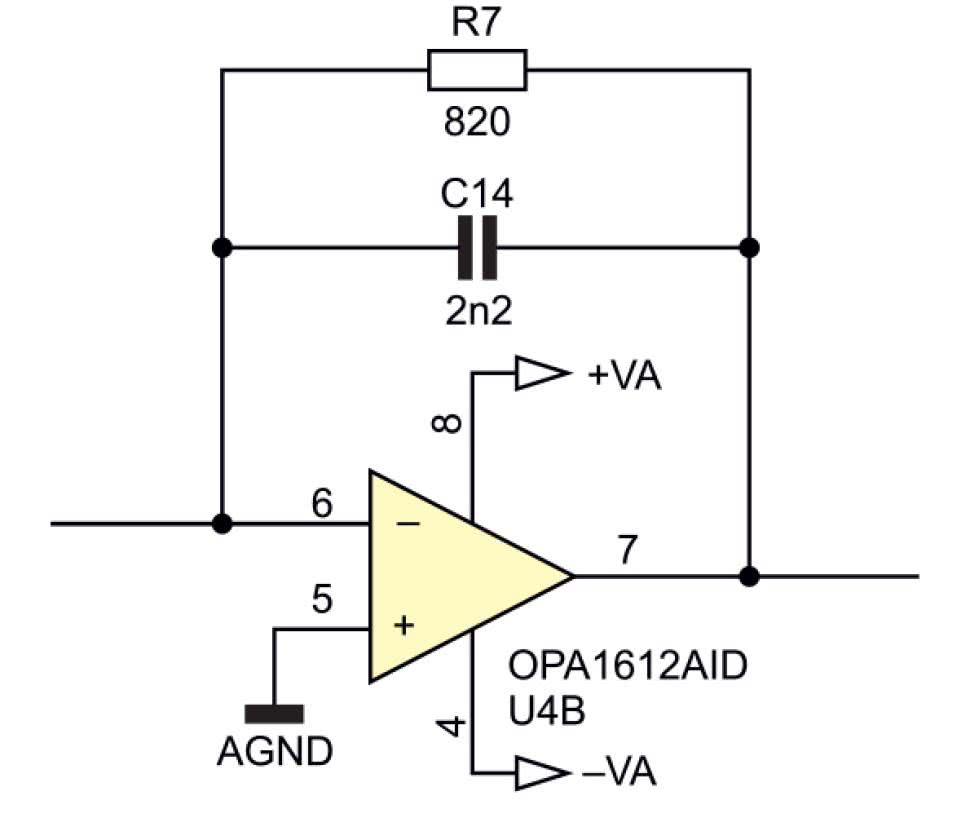
Na rysunku 7 pokazano układ konwertera I/U dla jednego z wyjściowych sygnałów różnicowych, dostępnych na wyjściu PCM1794A. Dla każdego z kanałów, lewego i prawego, potrzebne są dwa takie układy, czyli w sumie cztery. Jak wspominałem, w wysokiej klasy przetwornikach konwersja I/U jest wykonywana poza układem DAC. Aby taki konwerter spełniał wymogi wysokiej jakości, trzeba zastosować wysokiej klasy wzmacniacz operacyjny. Kryterium wysokiej jakości spełnia zastosowany tu podwójny wzmacniacz OPA1612 z rodziny SoundPlus, produkowanej przez Texas Instruments. To niskoszumowy wzmacniacz z wejściami bipolarnymi, o bardzo małych zniekształceniach nieliniowych, na poziomie 0,000015% dla 1 kHz, dużą prędkością narastania sygnału 27 V/μs i paśmie 40 MHz (dla G=1). OPA1612 może stabilnie pracować jako wtórnik (ze wzmocnieniem G=1).
W układzie konwertera I/U powinien być zastosowany kondensator C14, o dobrych parametrach, i rezystor o jak najmniejszych szumach. W prototypie zastosowałem kondensator polipropylenowy MKP (WIMA) i rezystor metalizowany firmy Royalohm, o tolerancji 1% i mocy 0,25 W, w obudowie SMD1206. Można też zastosować elementy typu MELF do montażu powierzchniowego.
Desymetryzator i filtr dolnoprzepustowy
Różnicowe sygnały napięciowe z układów konwerterów I/U trzeba zamienić na sygnał asymetryczny i poddać filtrowaniu dolnoprzepustowemu, zgodnie z teorią o próbkowaniu sygnałów. Charakterystyka częstotliwościowa filtra może opadać łagodnie, bo sygnał cyfrowy w przetworniku jest 8-krotnie nadpróbkowany. Filtr powinien przenosić bez zniekształceń pasmo częstotliwości do 20 kHz oraz tłumić wszystkie częstotliwości powyżej 8×20 kHz=160 kHz, co jest dość łatwe do wykonania. W praktyce, taki filtr może przenosić pasmo dużo większe, na przykład 30 kHz, po to, żeby w paśmie użytecznym zapewnić jak najlepszą liniowość przenoszenia. Bez nadpóbkowania nie da się tego wykonać. Układ desymetryzatora i filtra dla jednego kanału pokazuje rysunek 8.
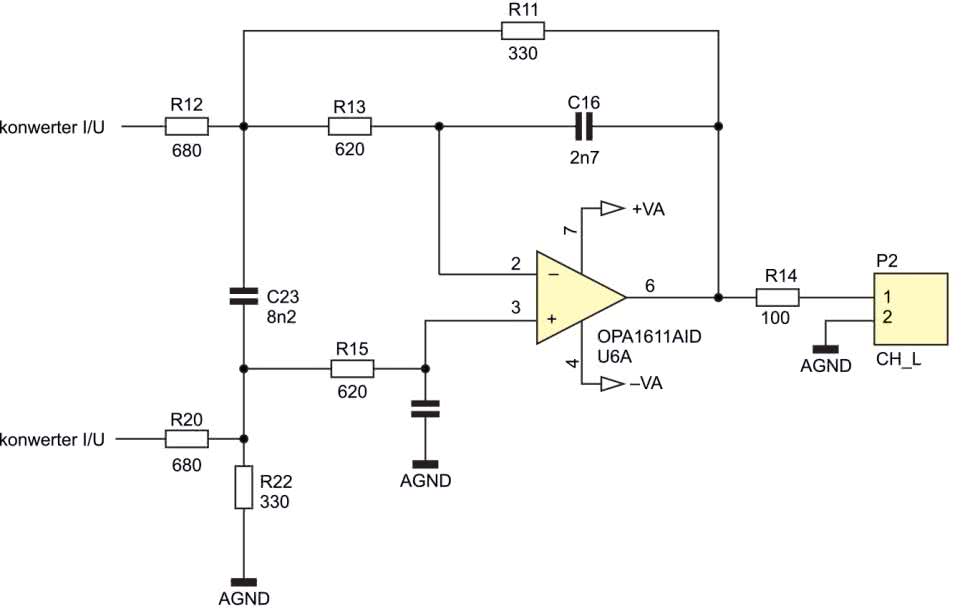
Zastosowano wzmacniacz OPA1611, który ma identyczne parametry jak OPA1612, ale w 8-wyprowadzeniowej obudowie umieszczono tylko jeden wzmacniacz. Elementy zastosowane w filtrze powinny być dobrej jakości. Minimum to rezystory metalizowane i kondensatory z foliowym dielektrykiem. W prototypie nie ma wymyślnych audiofilskich podzespołów. Zastosowałem metalizowane rezystory do montażu powierzchniowego SMD, w obudowie SMD1206 firmy Royalohm, o tolerancji 1% i mocy 0,25 W, oraz kondensatory poliestrowe MKT, o tolerancji 2,5%. Tak jak w przypadku konwertera I/U można stosować rezystory MELF i na przykład kondensatory polipropylenowe. Niestety nie mogą być one zbyt duże, bo z założenia filtr miał być kompaktowy i nie ma na to miejsca na płytce.
Zasilanie układu
Stabilizatory zasilające obwody cyfrowe i analogowe przetwornika PCM1794A zostały opisane wcześniej. Do zasilania całego układu przetwornika z sieci energetycznej został zaprojektowany moduł zasilacza z dwoma małymi transformatorami, którego schemat pokazano na rysunku 9.
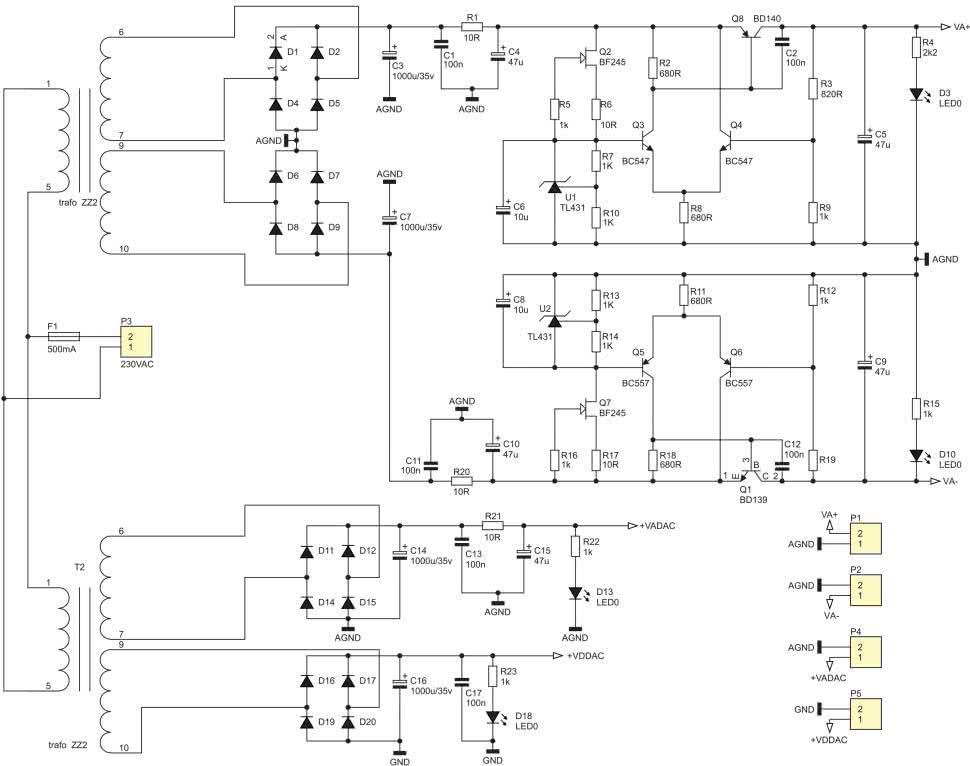
Moduł został umieszczony na osobnej płytce drukowanej i odpowiada za dostarczenie czterech napięć:
- Niestabilizowanego, o wartości ok. 8,5 V, do zasilania układów cyfrowych przetwornika. Jest ono podawane na wejście stabilizatora U9 typu LT1763 3,3;
- Niestabilizowanego, o wartości ok. 8,5 V, do zasilania układów analogowych przetwornika. Jest ono podawane na wejście trzech układów stabilizatorów shunt zasilających obwody analogowe układu PCM1794A;
- Stabilizowanego +9 V do zasilania wzmacniaczy operacyjnych układów konwertera I/U oraz filtra;
- Stabilizowanego –9 V do zasilania wzmacniaczy operacyjnych układów konwertera I/U oraz filtra.
Pierwsze dwa napięcia, o wartości 8,5 V, pochodzą z dwu niezależnych uzwojeń transformatora o mocy 7 VA. Każde z nich ma napięcie znamionowe 6 V AC przy obciążeniu 600 mA. Napięcia są prostowane w prostowniku pełnookresowym i filtrowane kondensatorem elektrolitycznym 1000 μF/25 V. W układzie zasilania obwodów analogowych przetwornika umieszczono dodatkowy filtr RC z rezystorem 10 Ω i kondensatorem 47 μF.
Napięcia niestabilizowane są wejściowymi napięciami dla stabilizatorów: U9 zasilającego napięciem +3,3 V układy cyfrowe PCM1794A i dla stabilizatorów TL431 zasilających napięciem +5 V układy analogowe. W przypadku obu tych napięć główną rolę odgrywają omawiane już układy stabilizacji umieszczone na płytce przetwornika.
Trochę inaczej wygląda sprawa w przypadku zasilaczy napięć symetrycznych dla wzmacniaczy operacyjnych. Dotychczas, w zdecydowanej większości przypadków, stosowałem stabilizatory LT317/337 zasilające napięciem symetrycznym układy audio ze wzmacniaczami operacyjnymi.
Jeżeli elementy te były oryginalne, kupowane z pewnego źródła, to zasilacz na nich wykonany charakteryzował się z jednej strony prostotą, a z drugiej strony doskonałymi parametrami, w tym niskim poziomem szumów. Niestety na rynku jest masa podróbek, które nie gwarantują takich parametrów.
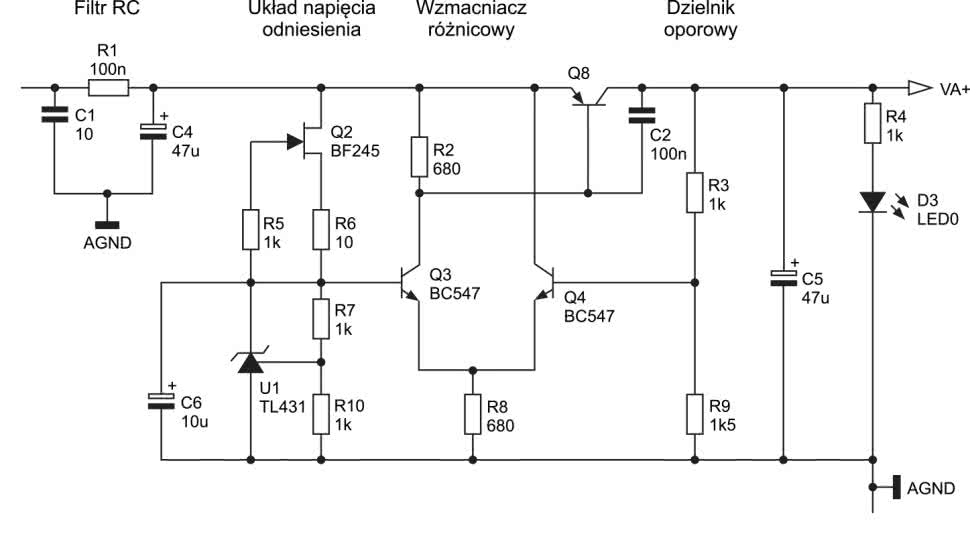
W ramach eksperymentu zastosowałem w miarę prosty, ale o dobrych parametrach szumowych, układ stabilizatora zbudowany z elementów dyskretnych składający się z klasycznych bloków funkcjonalnych (rysunek 10):
- układu napięcia odniesienia o wartości +5 V,
- różnicowego wzmacniacza błędu,
- wyjściowego dzielnika oporowego,
- tranzystora regulacyjnego.
Źródłem napięcia odniesienia jest znany nam już układ TL431 zasilany ze źródła prądowego zbudowanego na tranzystorze FET typu BF245.
Napięcie odniesienia ma wartość ok. 4,95 V, jest stabilne temperaturowo i ma niski poziom szumów. Wzmacniacz różnicowy porównuje napięcie odniesienia z napięciem z dzielnika oporowego umieszczonego na wyjściu stabilizatora. Wypracowany w ten sposób sygnał błędu steruje bazą tranzystora wykonawczego, utrzymując na wyjściu zadane, stałe napięcie. Na wejściu stabilizatora umieszczono dodatkowy filtr RC (R1, C4) tłumiący tętnienia sieci. Jako źródło napięcia stabilizatorów napięć symetrycznych zastosowałem transformator sieciowy o mocy 7 VA z dwoma napięciami 12 V AC przy obciążeniu 290 mA. Dla napięć ujemnych układ ma prawie identyczną topologię i jest zbudowany z tranzystorów o przeciwnej polaryzacji.
Zasilanie komputerka Raspberry Pi
W moim odtwarzaczu użyłem Raspberry Pi w wersji 4B z pamięcią 4 GB, dzięki uprzejmości firmy Kamami. Wszystko wskazuje na to, że wydajność zasobów komputerka jest znacznie większa niż potrzeby użytej aplikacji Volumio. Z różnych recenzji wynika, że zupełnie wystarczająca jest poprzednia wersja 3B lub sporo tańsza wersja 4B z mniejszą pamięcią. Według danych ze strony Raspberry Pi do zasilania potrzebne jest stabilne źródło zasilania o napięciu +5 V i wydajności 2,5 A, przy założeniu, że z portu USB pobieramy maksymalnie 500 mA. W testach samego komputerka używałem, z dobrym skutkiem, ładowarki do telefonu o wydajności 2 A.
Konstruktorzy układów audio z Rasbperry Pi lub podobnymi komputerkami mają problem z ich zasilaniem. Układ jest taktowany z częstotliwością 1,5 GHz i przy nieodpowiednim zasilaniu może być źródłem zakłóceń EMI przedostających się przez obwody masy do przetwornika. Z tego powodu niektórzy stosują izolację galwaniczną pomiędzy Raspberry Pi a układami cyfrowymi przetwornika, o czym już pisałem przy omawianiu interfejsu I2S. Innym sposobem jest zastąpienie popularnych zasilaczy impulsowych, takich jak w ładowarkach do telefonów, zasilaczem liniowym o odpowiedniej wydajności. Chociaż prawidłowo zaprojektowane pod kątem zakłóceń EMI i wykonane zasilacze impulsowe nie ustępują poziomem zakłóceń zasilaczom liniowym, to trudno takie dostać i są kosztowne.

Ostatecznie zdecydowałem się na zastosowanie zasilacza liniowego o napięciu wyjściowym +5 V i wydajności prądowej 5 A. Jego schemat został pokazany na rysunku 11. Transformator sieciowy ma moc 30 VA i dostarcza prądu 5 A przy napięciu 6 V AC. Mostek prostowniczy może prostować prąd o maksymalnym natężeniu 10 A. Kondensatory filtra mają pojemność 3×4700 μF. Wyprostowane i odfiltrowanie napięcie jest stabilizowane przez układ LM1084–5 o napięciu wyjściowym 5 V i ograniczeniu prądowym 5 A. Jest to prosty układ, który jak się okazało, doskonale spełnia swoją funkcję.
Podsumowanie
Jak pisałem w poprzedniej części artykułu, wszystkie zastosowane techniczne zabiegi miały na celu uzyskanie jak najlepszej jakości dźwięku. Nawet obwody zasilania zostały zaprojektowane w sposób niestandardowy, zoptymalizowany do aplikacji audio i dlatego wymagały szczegółowego opisu.
Na tym zakończyliśmy opis konstrukcji elektronicznej. W kolejnej części artykułu zajmiemy się uruchomieniem i, tak wyczekiwanymi, testami odtwarzacza.
Tomasz Jabłoński, EP
- R1, R6, R17, R20, R21: 10 Ω 0,25 W
- R2, R8, R11, R18: 680 Ω 1% 0,25 W
- R3, R19: 820 Ω 1% 0,25 W
- R5, R7, R9, R10, R12…R14, R16, R22, R23: 1 kΩ 0,25 W
- R4, R15: 2,2 kΩ 0,25 W
- C2, C11, C12: 100 nF X7R SMD1206
- C6, C8: 10 μF/25 V SME
- C4, C5, C9, C10, C15: 47 μF/25 V SME
- C3, C7, C14, C16: 1000 μF/35 V
- D1, D2, D4…D9, D11, D12, D14…D16: 1N4007
- D3, D10, D13, D18: dioda LED czerwona SMD1206
- U1, U2: TL431 (SOT23-3)
- Q1: BD139
- Q8: BD140
- Q3, Q4: BC 547
- Q5, Q6: BC 557
- Q2, Q7: BF245B
- T1: INDEL TSZZ 7/008M, 2×12 V AC, 7 VA
- T2: INDEL TSZZ 7/004M, 2×6 V AC, 7 VA
- F1: bezpiecznik 500 mA w okrągłej obudowie
- P1, P2, P4, P5: złączki WAGO sprężynowe












