Zaloguj
Zaloguj



- częstotliwości środkowe filtrów kanałów LED: 400 Hz, 2000 Hz, 4000 Hz,
- maksymalny prąd gniazd wyjściowych LED1…3: ok. 10 A,
- napięcie zasilania: 7…12 V,
- pobór prądu samego urządzenia: ok. 10 mA.
Zadaniem urządzenia miała być realizacja funkcji kolorofonu z cyfrowym torem przetwarzania sygnałów audio, bez potrzeby stosowania analogowych filtrów wejściowych. Co więcej, chciałem żeby docelowa implementacja bazowała na bardzo prostym mikrokontrolerze, o ograniczonych zasobach sprzętowych. W ten sposób postanowiłem udowodnić, że nawet skomplikowane, na pozór, zadania programowe można zrealizować przy użyciu minimalnych zasobów sprzętowych.
Budowa i działanie
Zaprojektowano bardzo prosty, system mikroprocesorowy, którego schemat ideowy został pokazany na rysunku 1. Jego „Sercem” jest jeden z najmniejszych mikrokontrolerów firmy Microchip (dawniej Atmel) o oznaczeniu ATtiny13, taktowany wewnętrznym, wysokostabilnym generatorem RC o częstotliwości 9,6 MHz. Jest on odpowiedzialny za realizację pełnej funkcjonalności urządzenia. Próbkuje wejściowy sygnał audio doprowadzony do wyprowadzenia ADC2 (PB4) układu, z częstotliwością 8 kHz używając przy tym układu czasowo-licznikowego Timer0, który jest w tym wypadku wyzwalaczem konwersji wbudowanego przetwornika ADC pracującego w trybie 8-bitowym.
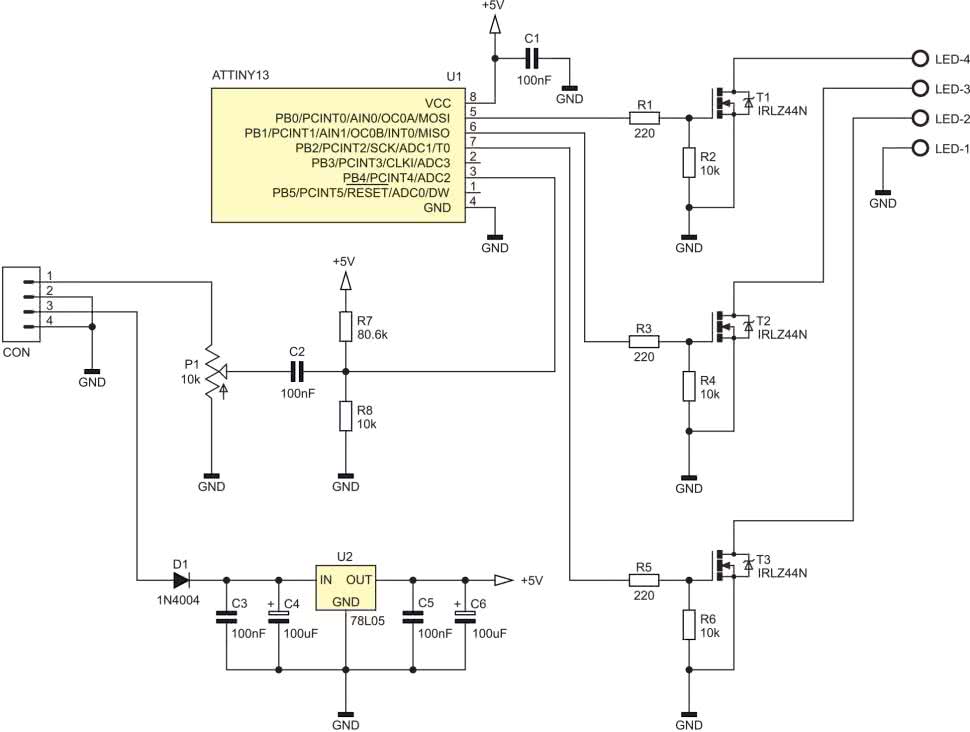
Następnie, po zebraniu N liczby próbek (20) wykonuje zoptymalizowany algorytm dyskretnej transformaty Fourier’a korzystający z tzw. współczynników wektora rotującego (twiddle factors), aby wyznaczyć moce sygnału dla trzech zakresów częstotliwościowych: 400 Hz, 2000 Hz i 4000 Hz. Wyznaczone wartości są z kolei przeliczane (zakres 0…127) na współczynnik wypełnienia dla trzech wyjściowych kanałów PWM, przy pomocy których urządzenie steruje pracą diod powerLED (z wykorzystaniem wbudowanych tranzystorów MOSFET) podłączonych do złącza LED.
Zastosowano tutaj programowy, 3 kanałowy, 7-bitowy generator PWM, bazujący na tym samym układzie czasowo-licznikowym Timer0 i jego przerwaniu od porównania zawartości licznika z wartością rejestru OCR0A (TIM0_COMPA_vect). Takie rozwiązanie było konieczne, ponieważ mikrokontroler ATtiny13 dysponuje wyłącznie dwoma kanałami sprzętowego generatora PWM, co jest w tym wypadku niewystarczające.
Uważny Czytelnik zastanowi się również nad zagadnieniem, w jaki sposób tak prosty mikrokontroler o pamięci programu wielkości 1 kB i 64 bajtowej pamięci RAM jest w stanie zrealizować skomplikowane obliczenia dyskretnej transformaty Fourier’a DFT. Zastosowałem tutaj wiedzę zawartą w interesującym artykule autorstwa Łukasza Podkalickiego (EP 12/2019) prezentującym arcyciekawe zagadnienia z zakresu DSP w odniesieniu do transformacji Fourier’a w ujęciu realizacji na prostych, 8-bitowych mikrokontrolerach o ograniczonej mocy obliczeniowej i niewielkiej ilości pamięci RAM. Autor opisuje tam, jak przy użyciu arytmetyki stałoprzecinkowej i współczynników wektora rotującego w prosty sposób jesteśmy w stanie wykonać dyskretną transformatę Fourier’a (DFT) sygnału audio, otrzymując widmo jego mocy. Na pierwszy rzut oka wydaje się to niewiarygodne, ale naprawdę działa. Oczywiście stosuję tutaj pewną sztuczkę polegającą na tym, że moc sygnału obliczana jest wyłącznie dla wybranych prążków częstotliwościowych, ale w niczym nie umniejsza to możliwości liczenia transformaty Fourier’a na tak niewielkim mikrokontrolerze AVR.
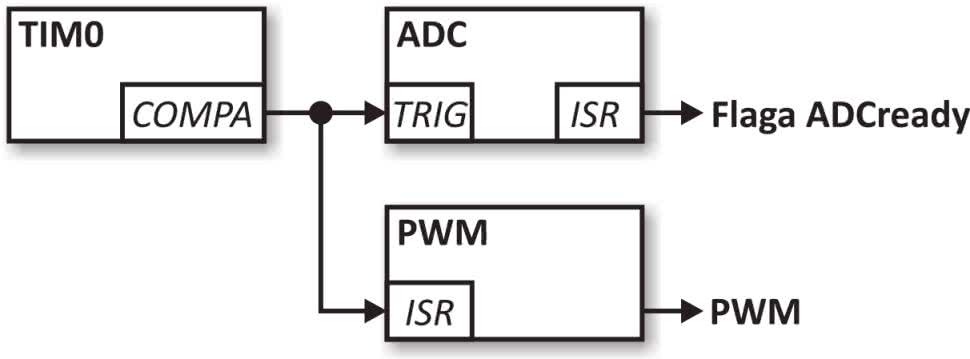
Wróćmy jeszcze na chwilę do głównego zadania naszego układu jakim jest akwizycja i przetwarzanie danych próbek sygnału audio. Proces ten możliwy jest do wykonania dzięki sprzęgnięciu ze sobą kilku podsystemów mikrokontrolera AVR, co pokazano na rysunku 2. Jak widać, podstawowym podsystemem mikrokontrolera ATtiny13 inicjującym pomiar przetwornika ADC jest układ czasowo-licznikowy Timer0 taktowany przebiegiem zegarowym o częstotliwości 1,2 MHz (otrzymanym poprzez podzielenie przebiegu zegarowego mikrokontrolera o częstotliwości 9,6 MHz przez preskaler równy 8) generuje zdarzenie porównania licznika (COMPA) co 150 taktów zegara (OCR0A=149), czyli 8000 razy na sekundę.
Zdarzenie porównania jest wyzwalaczem (TRIG) dla wbudowanego w strukturę mikrokontrolera przetwornika ADC, dzięki czemu możliwe jest próbkowanie wejściowego sygnału audio w równych odstępach czasu (8 kHz).
Dalej, przerwanie od zakończenia konwersji przetwornika ADC (ADC_vect) odpowiedzialne jest za właściwą akwizycję danych oraz ustawianie stosownych flag dla programu obsługi aplikacji. Co więcej, wspomniane wcześniej zdarzenie porównania stanowi również wyzwalacz dla procedury obsługi przerwania od porównania, które to jest odpowiedzialne za programową obsługę 3 kanałów PWM. W ten prosty sposób Timer0 steruje zarówno akwizycją danych przetwornika ADC, jak i stanem pracy wyjściowych kanałów PWM.
Program sterujący
Kod odpowiedzialny za inicjalizację przetwornika ADC pokazano na listingu 1, zaś kod odpowiedzialny za inicjalizację układu czasowo-licznikowego Timer0 pokazano na listingu 2. Dalej, na listingu 3 pokazano kod obsługi przerwania odpowiedzialny za realizację 3-kanałowego, 7-bitowego, programowego generatora PWM.
void ADCinit(void) {
//Internal Voltage Reference (1.1V), ADC Left Adjust Result (8-bit), MUX = ADC2 (PB4)
ADMUX = (1<<REFS0)|(1<<ADLAR)|(1<<MUX1);
//ADC Enable, ADC Auto Trigger Enable, ADC Interrupt Enable , Division Factor = 64 (150kHz)
ADCSRA = (1<<ADEN)|(1<<ADATE)|(1<<ADIE)|(1<<ADPS2)|(1<<ADPS1);
//ADC Auto Trigger Source: Timer/Counter Compare Match A
ADCSRB = (1<<ADTS1)|(1<<ADTS0);
//Digital Input Disable on ADC2 (PB4) pin
DIDR0 = (1<<ADC2D);
}
void PWMinit(void) {
PWM_DDR = 0b111; //PWM port as output
TCCR0A = (1<<WGM01); //Timer0 CTC mode
OCR0A = 149; //ISR TIM0_COMPA_vect 8000 triggered times per second
TCCR0B = (1<<CS01); //Prescaler = 8
TIMSK0 = (1<<OCIE0A); //Timer/Counter0 Output Compare Match A Interrupt Enable
}
ISR(TIM0_COMPA_vect) {
static uint8_t Counter;
Counter = (Counter +1) & 0x7F; //7 bits
for(uint8_t i=0; i<3; ++i){
if(Counter < PWM[i]) PWM_PORT |= (1<< i);
else PWM_PORT &= ~(1<< i);
}
}
ISR(ADC_vect){
static uint8_t Idx;
if(ADCdataReady == 0) {
ADCbuffer[Idx++] = ADCH - 128;
if(Idx == N) {
Idx = 0;
ADCdataReady = 1;
}
}
}
Na listingu 4 pokazano kod obsługi przerwania po konwersji przetwornika ADC odpowiedzialny za akwizycję danych wejściowych ADC. Zebraniu kompletnej porcji danych towarzyszy zatrzymanie akwizycji danych oraz ustawienie flagi ADCdataReady, dzięki czemu możliwe jest przetworzenie danych przez program główny aplikacji. Za przetworzenie danych, czyli obliczenie dyskretnej transformaty Fourier’a z próbek sygnału zebranych w tablicy ADCbuffer[], odpowiedzialna jest funkcja pokazana na listingu 5. Wynikiem działania funkcji DFT() jest moc szukanego prążka częstotliwości (w zakresie 0…127 dostosowanym do rozdzielczości kanałów PWM).
uint8_t DFT(uint8_t i){
uint16_t a, b;
int32_t Re, Im;
//Obliczamy moc sygnału (0...127) dla szukanego prążka częstotliwościowego i < (N/2)+1
Re = Im = a = 0;
b = 3*N/4;
for (uint8_t j=0; j<N; ++j){
Re += (ADCbuffer[j] * (int8_t) pgm_read_byte(&Twiddle[a % N]))/MULF;
Im -= (ADCbuffer[j] * (int8_t) pgm_read_byte(&Twiddle[b % N]))/MULF;
a += i;
b += i;
}
return (Re*Re + Im*Im)/16384;
}
Właśnie to zadanie stanowi główny problem obliczeniowy, o którym wspomniano na wstępie artykułu. Wynika to z liczby obliczeń stałoprzecinkowych wykonywanych w ramach pętli, z których składa się wspomniana funkcja. Jak widać, liczba tych obliczeń zależy bezpośrednio od liczby punktów transformaty Fourier’a (N), która w naszym przypadku wynosi 20. Z kolei liczba punktów transformaty determinuje odległość kolejnych prążków mocy (tzw. BIN) a wynika z zależności:
BIN = częstotliwość próbkowania sygnału/liczba punktów transformaty (N).
Dla naszego przypadku BIN=400 Hz (8 kHz/20), co oznacza, że kolejne wartości częstotliwości, dla których liczona jest moc sygnału są wielokrotnością wartości 400 Hz. Wartość ta jest kompromisem pomiędzy rozdzielczością mocy (BIN) a czasem niezbędnym na wykonanie funkcji DFT() przy przyjętej liczbie punktów transformaty (N). W naszym przypadku czas ten wynosi około 5,4 ms (zmierzony empirycznie), co determinuje częstotliwość odświeżania (framerate), która w tym przypadku wynosi około 185 Hz a więc doskonale, jak na nasz niewielki mikrokontroler. Dalsze zwiększanie liczby punktów transformaty (N), mimo iż pożądane, zmniejszyłoby częstotliwość odświeżania kanałów PWM do wartości nieakceptowalnych i praktycznie nieużytecznych. To jest główne ograniczenie software’owe naszej implementacji, o którym wspomniano wcześniej i wynika w głównej mierze z 8-bitowej architektury mikrokontrolera AVR, jak i maksymalnej, dostępnej częstotliwości taktowania rdzenia.
SUT1: 1
SUT0: 0
CKSEL1: 1
CKSEL0: 0
CKDIV8: 1
Warto również podkreślić, że przed wykonaniem funkcji DFT() (w pętli głównej programu aplikacji) zebrana tablica danych wejściowych ADCbuffer[] poddawana jest okienkowaniu, które ma na celu ograniczenie tak zwanych wycieków widma sygnału. Zastosowana funkcja okna jest typu Hanna (Hanninga), zaś stosowne współczynniki zebrano w tabeli Window[] umieszczonej w pamięci Flash mikrokontrolera, której to treść pokazano na listingu 6.
//Tablica współczynników okna Hanninga: Window[i] = (int8_t) (MULF*(0.5-0.5*cos(i*PI2/(N-1)))), dla i<N
const int8_t Window[N] PROGMEM = {0, 2, 7, 14, 24, 35, 45, 54, 60, 64, 64, 60, 54, 45, 35, 24, 14, 7, 2, 0};
Montaż i uruchomienie
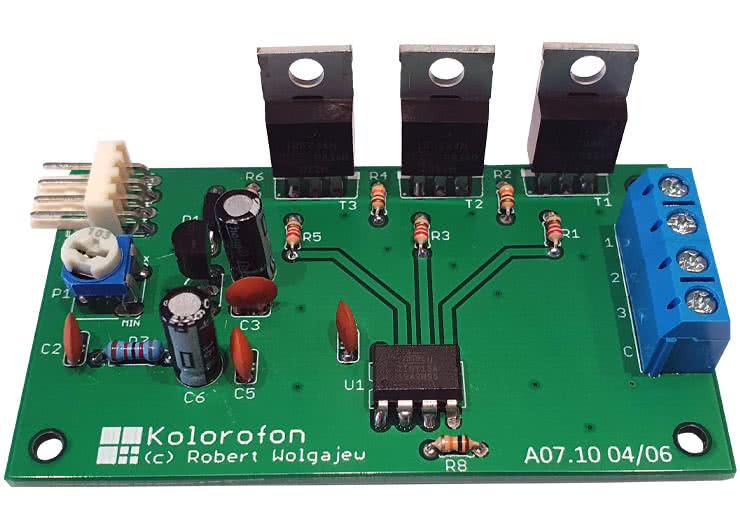
Schemat płytki PCB wraz z rozmieszczeniem elementów urządzenia Kolorofon pokazano na rysunku 3. Zaprojektowano niewielką, dwustronną płytkę drukowaną z zastosowaniem wyłacznie elementów przewlekanych, co w założeniu miało uprościć implementację urządzenia. Montaż rozpoczynamy od przylutowania wszystkich rezystorów oraz diody półprzewodnikowej D1. Dalej lutujemy wszystkie kondensatory ceramiczne, następnie kondensatory elektrolityczne, po czym przystępujemy do przylutowania wszystkich elementów półprzewodnikowych. Na samym końcu montujemy potencjometr montażowy P1 oraz złącza przyłączeniowe CON i LED.
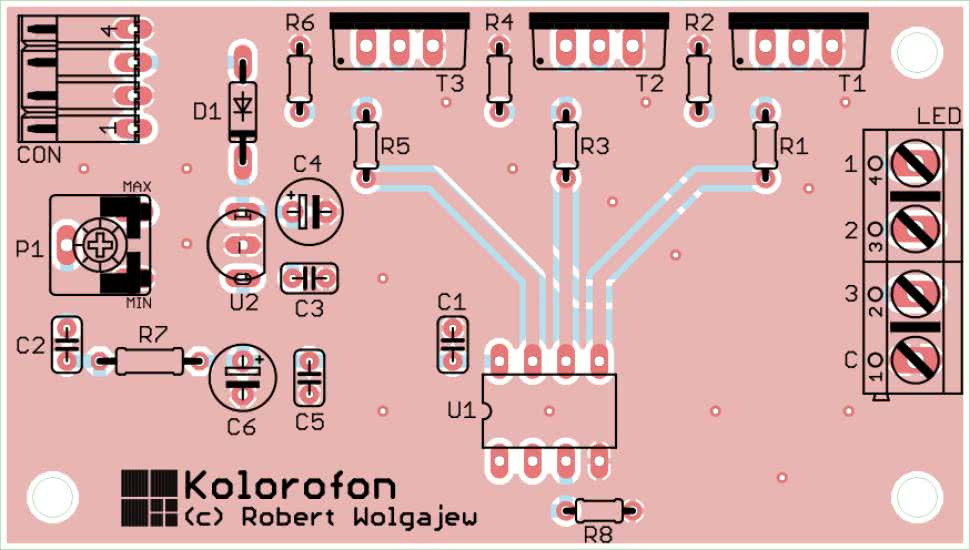
Warto zauważyć, że tranzystory sterujące T1…T3 mogą wymagać zastosowania niewielkich radiatorów a sama potrzeba wynika z mocy, jaką te elementy przełączają. Z kolei potencjometr P1 służy do regulacji czułości układy wejściowego. Zmontowaną płytkę urządzenia pokazuje fotografia tytułowa. Na koniec warto wspomnieć o tym, że zamiast diod powerLED możemy również zastosować żarówki na napięcie 12 V.
Robert Wołgajew, EP
- R1, R3, R5: 220 Ω (miniaturowy)
- R2, R4, R6, R8: 10 kΩ (miniaturowy)
- R7: 80,6 kΩ 0,1%
- C1…C3, C5: 100 nF ceramiczny
- C4, C6: 100 µF/16 V
- U1: ATtiny13 (DIP08)
- U2: 78L05 (TO92)
- T1, T2, T3: IRLZ44N (TO220)
- D1: 1N4007 (DO41)
- P1: potencjometr montażowy leżący 10 kΩ
- LED: złącze śrubowe AK500/4
- CON: gniazdo męskie 4 pin (NSL25-4W)