 Zaloguj
Zaloguj




- zegar, stoper, kalendarz i budzik,
- prostota i niska cena konstrukcji,
- duża ergonomia obsługi i atrakcyjny wygląd,
- zasilanie 3…5 V, 10 mA.
Zegara nie mogło zabraknąć również wśród moich konstrukcji. Postanowiłem jednak powiesić poprzeczkę nieco wyżej i zaprojektować urządzenie wyróżniające się następującymi cechami użytkowymi:
- prostota konstrukcji,
- niska cena implementacji,
- łatwość montażu,
- atrakcyjny wygląd,
- duża funkcjonalność,
- duża ergonomia obsługi.
Niektóre z tych cech wydają się przeciwstawne i z pozoru trudno wyobrazić sobie ich wzajemne współistnienie w ramach jednego projektu, lecz uwierzcie mi na słowo – zaprezentowany poniżej system mikroprocesorowy μClock integruje wszystkie wspomniane powyżej założenia konstrukcyjne.
Pierwszym z dylematów, z jakim miałem się zmierzyć, konstruując to urządzenie był wybór zegara czasu rzeczywistego (RTC). Początkowo wydawało się, iż tego rodzaju peryferium z powodzeniem możemy zrealizować programowo przy współudziale wbudowanego w strukturę mikrokontrolera układu czasowo-licznikowego Timer2, który w przypadku wielu mikrokontrolerów z rodziny AVR może pracować w trybie asynchronicznym, realizując zadanie zegara czasu rzeczywistego. Jednak w przypadku takiej implementacji nierozwiązany pozostaje problem podtrzymania zasilania układu RTC w czasie braku zasilania systemu mikroprocesorowego. Zresztą samo podtrzymanie bateryjne nie rozwiązuje w tym przypadku problemu, gdyż co prawda asynchroniczny układ czasowo-licznikowy Timer2 może pracować w trybie głębokiego uśpienia mikrokontrolera (pobierającego w tym stanie pracy niewielki prąd z podtrzymującej baterii zasilającej), lecz nie znaczy to, że z automatu realizuje on w tym czasie zadania typowego układu RTC. Aby wspomniany Timer2 realizował zadania sprzętowego układu RTC, potrzebny jest odpowiedni fragment kodu obsługi aplikacji (obsługi przerwania Timera2) a więc zachodzi konieczność pracy mikrokontrolera. Można to oczywiście ominąć, wybudzając mikrokontroler co 1 s i w krótkim czasie po przebudzeniu realizować treść obsługi przerwania Timera2, czyli de facto realizując zadania programowego zegara RTC, po czym wracać do stanu uśpienia, lecz nie jest to moim zdaniem rozwiązanie optymalne, a już na pewno nie jest proste w implementacji.
Ostatecznie i biorąc pod uwagę fakt, że w konstrukcji urządzenia μClock wykorzystuję magistralę I2C do współpracy z zastosowanym wyświetlaczem OLED, a więc część kodu obsługi sprzęgu I2C i tak musi się znaleźć w treści kodu naszej aplikacji, zdecydowałem, że jako układu RTC użyję zewnętrznego, taniego i wygodnego w implementacji układu firmy Microchip typu MCP-79410. Ma on ważną zaletę – obsługuje automatyczny mechanizm podtrzymania bateryjnego zegara RTC, pobierając w takim trybie pracy prąd rzędu kilkuset nA. Co więcej, układ ten cechuje się następującymi, wybranymi walorami użytkowymi:
- obsługa dokładnego zegara RTC oraz kalendarza do roku 2399,
- możliwość regulacji dokładności wbudowanego oscylatora w zakresie ±129 ppm,
- funkcja automatycznego podtrzymania zasilania bateryjnego ustawień RTC,
- funkcja automatycznego znacznika czasu wypadnięcia/przywrócenia zasilania,
- wielofunkcyjne wyjście MFP wyposażone w możliwość generowania przebiegów prostokątnych o wybranej częstotliwości,
- wbudowana pamięć RAM o wielkości 64 B podtrzymywana bateryjnie,
- wbudowana pamięć EEPROM o wielkości 1 kB,
- szeroki zakres napięć zasilających 1,8...5,5 V.
Budowa i działanie
Układ MCP-79410 idealnie wpisuje się w wymagania naszej aplikacji, w związku z tym przejdźmy od razu do schematu aplikacyjnego urządzenia μClock, który pokazano na rysunku 1. Zaprojektowano bardzo prosty system mikroprocesorowy, którego sercem jest niewielki mikrokontroler firmy Microchip o oznaczeniu ATtiny84A. Realizuje on kilka kluczowych zadań w ramach programu obsługi aplikacji, a mianowicie: steruje pracą wbudowanego wyświetlacza OLED o organizacji 128×32 piksele stanowiącego element interfejsu użytkownika, angażując w tym celu interfejs I2C, zarządza współpracą ze wspomnianym wcześniej scalonym układem RTC typu MCP-79410 angażując, jak poprzednio, ten sam sprzęg I2C oraz obsługuje dwa przyciski funkcyjne PLUS i MINUS oraz buzzer piezoelektryczny BUZZ, będące elementami interfejsu użytkownika.
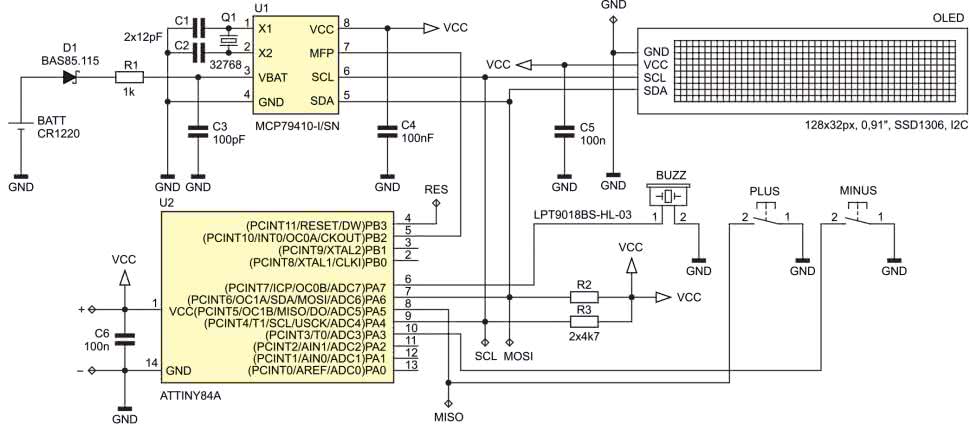
Warto w tym miejscu zaznaczyć, że obsługa przycisków funkcyjnych odbywa się bez jakichkolwiek opóźnień (typu _delay_ms), gdyż korzysta z wbudowanego w strukturę mikrokontrolera układu czasowo-licznikowego Timer1 pracującego w trybie CTC. Jego zadaniem jest generowanie i obsługa sprzętowych opóźnień w ramach funkcji obsługi przycisków, której zadaniem jest, po pierwsze, eliminacja niepożądanego zjawiska drgania styków (debouncing), a po drugie, obsługa długiego i krótkiego naciśnięcia, co wykorzystywane jest w ramach interfejsu użytkownika urządzenia μClock.
Kolejnym peryferium, jakie wykorzystuje nasz program obsługi aplikacji, jest układ czasowo-licznikowy Timer0 pracujący również w trybie CTC. Jest on odpowiedzialny za generowanie przebiegu prostokątnego o częstotliwości 4 kHz na wyjściu OC0B (PA7) mikrokontrolera, który zasila buzzer piezoelektryczny odpowiedzialny za efekty dźwiękowe (w funkcji budzika).
Ostatnim elementem mikrokontrolera, z którego dobrodziejstw korzysta program obsługi aplikacji, jest przerwanie zewnętrzne INT0 wyzwalane opadającym zboczem na wyprowadzeniu PB2 mikrokontrolera. Do tego wyprowadzenia mikrokontrolera podłączono wielofunkcyjne wyprowadzenie MFP układu RTC MCP-79410, na którym, po odpowiednim skonfigurowaniu, pojawia się bardzo dokładny sygnał 1 Hz niezbędny w programie obsługi aplikacji. Po pierwsze, służy do cyklicznego odświeżania ekranu interfejsu użytkownika, zaś pod drugie, obsługuje mechanizm programowego stopera będącego jedną z funkcji urządzenia.
Tyle w kwestiach konstrukcyjnych. Przejdźmy do zagadnień programowych, a te skupią się głównie na obsłudze naszego zegara RTC. Rozpoczniemy od pliku nagłówkowego, który jak zawsze staram się napisać w taki sposób, aby bez lektury dokumentacji układu możliwe było określenie niezbędnych funkcji peryferium. Zawartość pliku pokazano na listingu 1.
//Definicje typów strukturalnych
//do obsługi zegara RTC
typedef struct{
uint8_t Hour; //0...23
uint8_t Minute; //0...59
uint8_t Second; //0...59
}timeType;
typedef struct{
uint8_t weekDay; //1...7
uint8_t Day; //1...31
uint8_t Month; //1...12
uint8_t Year; //0...99
}dateType;
//Definicje adresów układu MCP79410
//w trybie zapisu/odczytu
#define MCP79410_WRITE_ADDR 0xDE
#define MCP79410_READ_ADDR 0xDF
//Definicje najważniejszych rejestrów
//sterujących i ich właściwości
#define TIME_START_REG 0x00
#define START_OSCILLATOR (1<<7)
#define STOP_OSCILLATOR (0<<7)
#define DATE_START_REG 0x03
#define VBAT_ENABLE (1<<3)
#define VBAT_DISABLE (0<<3)
#define CONTROL_REG 0x07
#define MFP_AS_OUTPUT_1 (1<<7)
#define MFP_AS_OUTPUT_0 (0<<7)
#define MFP_AS_SQUARE_OUTPUT (1<<6)
#define MFP_AS_NORMAL_OUTPUT (0<<6)
#define NO_ALARMS_ACTIVE (0<<4)
#define ALARM0_ACTIVE (1<<4)
#define ALARM1_ACTIVE (2<<4)
#define BOTH_ALARMS_ACTIVE (3<<4)
#define EXTERNAL_OSCILLATOR (1<<3)
#define INTERNAL_OSCILLATOR (0<<3)
#define SQUARE_1HZ 0x00
#define SQUARE_4096HZ 0x01
#define SQUARE_8192HZ 0x02
#define SQUARE_32768HZ 0x03
#define RAM_START_REG 0x20
Wprowadzono dwa dodatkowe typy strukturalne (timeType, dateType) odpowiedzialne za przechowywanie i przetwarzanie czasu i daty wbudowanego zegara RTC.
void RTCinit(uint8_t Settings){
i2cStart();
//Adres MCP79410 do zapisu
i2cWriteByte(MCP79410_WRITE_ADDR);
//Adres startowy rejestru ustawień zegara RTC
i2cWriteByte(CONTROL_REG);
//Ustawienia zegara RTC
i2cWriteByte(Settings);
i2cStop();
}
Na listingu 2 pokazano funkcję, której zadaniem jest konfiguracja cech sprzętowych zegara RTC. Argument funkcji decyduje o ustawieniach zegara (np. ustawieniach wyjścia MFP) i w przypadku naszego urządzenia przyjmuje wartość:
MFP_AS_SQUARE_OUTPUT|NO_ALARMS_ACTIVE|INTERNAL_OSCILLATOR|SQUARE_1HZ;
void RTCwriteTime(timeType *Time){
i2cStart();
//Adres MCP79410 do zapisu
i2cWriteByte(MCP79410_WRITE_ADDR);
//Adres startowy rejestru czasu
//(w tym przypadku sekund)
i2cWriteByte(TIME_START_REG);
//Sekundy w zapisie BCD + start oscylatora
i2cWriteByte(((Time->Second/10)<<4)|(Time->Second%10)|START_OSCILLATOR);
//Minuty w zapisie BCD
i2cWriteByte(((Time->Minute/10)<<4)|(Time->Minute%10));
//Godziny w zapisie BCD (standardowo zapis 24-godzinny)
i2cWriteByte(((Time->Hour/10)<<4)|(Time->Hour%10));
i2cStop();
}
void RTCreadTime(timeType *Time){
uint8_t readByte;
i2cStart();
//Adres MCP79410 do zapisu
i2cWriteByte(MCP79410_WRITE_ADDR);
//Adres startowy rejestru czasu
//w tym przypadku sekund)
i2cWriteByte(TIME_START_REG);
//I2C Restart
i2cRestart();
//Adres MCP79410 do odczytu
i2cWriteByte(MCP79410_READ_ADDR);
//Sekundy w zapisie BCD - maskujemy bit
//pracującego oscylatora (bit7)
readByte = i2cReadByte(ACK) & 0x7F;
Time->Second = ((readByte>>4)*10) + (readByte&0x0F);
//Minuty w zapisie BCD
readByte = i2cReadByte(ACK);
Time->Minute = ((readByte>>4)*10) + (readByte&0x0F);
//Godziny w zapisie BCD (standardowo zapis 24-godzinny)
readByte = i2cReadByte(NACK);
Time->Hour = (((readByte&0x30)>>4)*10) + (readByte&0x0F);
i2cStop();
}
Kontynuując, na listingu 3 pokazano proste funkcje narzędziowe umożliwiające odczyt i zapis czasu zegara RTC, zaś na listingu 4 bliźniacze funkcje odczytu i zapisu, ale tym razem daty.
void RTCwriteDate(dateType *Date){
i2cStart();
//Adres MCP79410 do zapisu
i2cWriteByte(MCP79410_WRITE_ADDR);
//Adres startowy rejestru daty
//(w tym przypadku dni tygodnia)
i2cWriteByte(DATE_START_REG);
//Dzień tygodnia +
//aktywacja podtrzymania bateryjnego
i2cWriteByte(Date->weekDay|VBAT_ENABLE);
//Dzień w zapisie BCD
i2cWriteByte(((Date->Day/10)<<4)|(Date->Day%10));
//Miesiąc w zapisie BCD
i2cWriteByte(((Date->Month/10)<<4)|(Date->Month%10));
//Rok w zapisie BCD
i2cWriteByte(((Date->Year/10)<<4)|(Date->Year%10));
i2cStop();
}
void RTCreadDate(dateType *Date){
uint8_t readByte;
i2cStart();
//Adres MCP79410 do zapisu
i2cWriteByte(MCP79410_WRITE_ADDR);
//Adres startowy rejestru daty
//(w tym przypadku dni tygodnia)
i2cWriteByte(DATE_START_REG);
//I2C Restart
i2cRestart();
//Adres MCP79410 do odczytu
i2cWriteByte(MCP79410_READ_ADDR);
//Dzień tygodnia
Date->weekDay = i2cReadByte(ACK) & 0x07;
//Dzień w zapisie BCD
readByte = i2cReadByte(ACK);
Date->Day = ((readByte>>4)*10) + (readByte&0x0F);
//Miesiąc w zapisie BCD
readByte = i2cReadByte(ACK);
Date->Month = (((readByte & 0x10)>>4)*10) + (readByte&0x0F);
//Rok w zapisie BCD
readByte = i2cReadByte(NACK);
Date->Year = ((readByte>>4)*10) + (readByte&0x0F);
i2cStop();
}
Dalej, korzystając z faktu, że nasze peryferium wyposażono w 64 bajty pamięci RAM podtrzymywanej bateryjnie, na listingu 5 zostały pokazane proste funkcje umożliwiające odczyt i zapis wbudowanej pamięci RAM układu. Analogicznie można zaimplementować podobne funkcje, lecz tym razem przeznaczone do obsługi pamięci EEPROM wbudowanej w układ MCP-79410.
void RTCwriteRAM(uint8_t *dataToWrite, uint8_t Bytes){
i2cStart();
//Adres MCP79410 do zapisu
i2cWriteByte(MCP79410_WRITE_ADDR);
//Adres startowy wbudowanej pamięci RAM zegara RTC
i2cWriteByte(RAM_START_REG);
while(Bytes--) i2cWriteByte(*dataToWrite++);
i2cStop();
}
void RTCreadRAM(uint8_t *dataToRead, uint8_t Bytes){
i2cStart();
//Adres MCP79410 do zapisu
i2cWriteByte(MCP79410_WRITE_ADDR);
//Adres startowy wbudowanej pamięci RAM zegara RTC
i2cWriteByte(RAM_START_REG);
//I2C Restart
i2cRestart();
//Adres MCP79410 do odczytu
i2cWriteByte(MCP79410_READ_ADDR);
while(Bytes--) *dataToRead++ = i2cReadByte(Bytes? ACK:NACK);
i2cStop();
}
Należy jednak w tym przypadku mieć na uwadze dwie istotne cechy. Po pierwsze, układ MCP-79410 ma w tym wypadku inny adres w przestrzeni adresowej magistrali I2C, niż ma to miejsce w przypadku ustawień RTC i RAM, zaś pod drugie, zapis do pamięci EEPROM, jak to zwykle bywa, zajmuje pewien określony i wcale nie taki krótki czas, co należy wziąć pod uwagę, aplikując stosowne funkcje. W naszym programie obsługi aplikacji pamięć EEPROM układu nie była wykorzystywana, w związku z czym nie istniała potrzeba implementacji stosownych funkcji narzędziowych.
//Przerwanie zachodzi co 1s,
//gdyż wyzwalane jest sygnałem 1Hz z układu RTC
ISR(INT0_vect){
//Obsługa stopera
if(Timer.Activity) if(++Timer.Second == 60){
Timer.Second = 0;
if(++Timer.Minute == 100) Timer.Minute = 0;
}
}
Na koniec kilka słów na temat obsługi stopera, jako że ta funkcja została zaimplementowana programowo z użyciem przerwania INT0 mikrokontrolera wyzwalanego sygnałem 1 Hz z układu RTC. Kod tej prostej funkcji pokazano na listingu 6, korzysta ona z nowego typu strukturalnego, którego deklarację pokazano na listingu 7.
//Definicja typu strukturalnego Timera
typedef struct{
uint8_t Minute; //0...99
uint8_t Second; //0...59
uint8_t Activity; //0/1
}timerType;
Montaż i uruchomienie
Schemat montażowy urządzenia został pokazany na rysunkach 2 i 3. Zaprojektowano niewielki, dwustronny obwód drukowany z zastosowaniem elementów o niezbyt wymagających obudowach, co w założeniu miało uprościć jego implementację, spełniając jedno z założeń konstrukcyjnych.
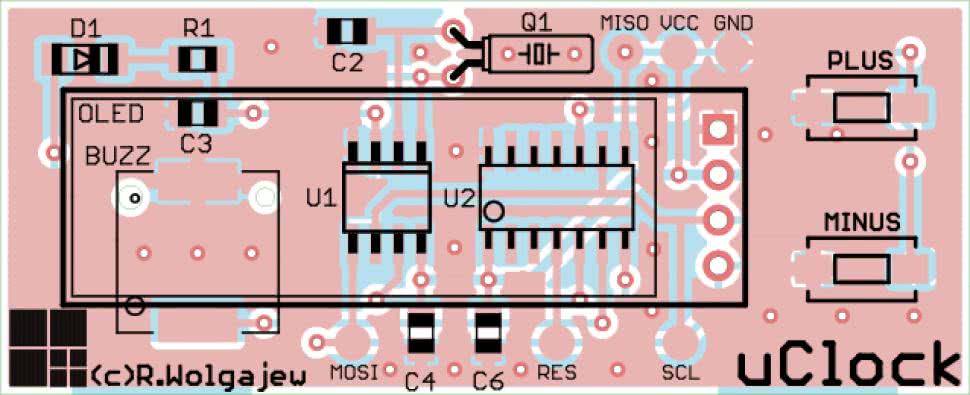
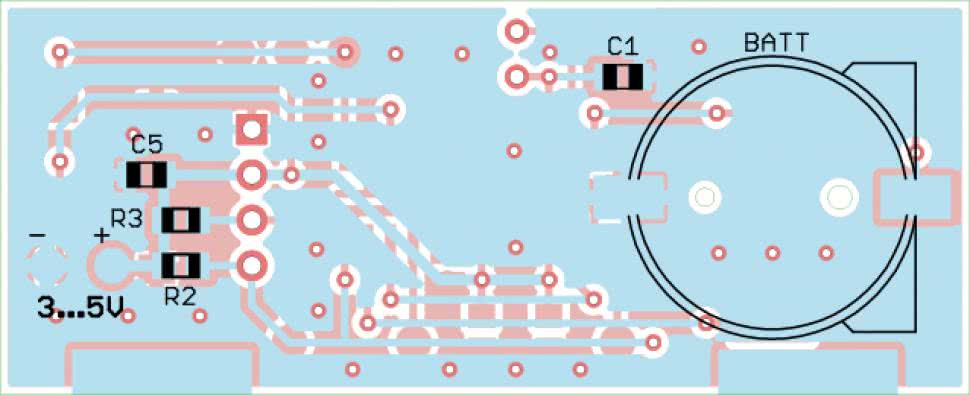
Montaż rozpoczynamy od warstwy TOP, gdzie w pierwszej kolejności montujemy wszelkiego rodzaju półprzewodniki. Następnie przylutowujemy elementy bierne (w tym rezonator kwarcowy) a na końcu przyciski PLUS i MINUS oraz buzzer piezoelektryczny BUZZ. Dalej przechodzimy na warstwę BOTTOM, gdzie podobnie jak poprzednio, montujemy wszelkie elementy bierne, a na końcu koszyk baterii podtrzymującej zasilanie BATT.
Następnie wracamy na warstwę TOP, gdzie montujemy moduł wyświetlacza OLED, zwyczajnie lutując jego wyprowadzenia typu goldpin do stosownych otworów na obwodzie drukowanym, co jednocześnie zapewnia mu wystarczająco stabilny montaż mechaniczny.
Wykonując to zadanie, musimy jednak zwrócić uwagę na wzajemne położenie płaszczyzny wyświetlacza w stosunku do zamontowanych wcześniej przycisków funkcyjnych.
Zasilanie urządzenia podłączamy za pomocą przewodów przylutowanych od strony warstwy BOTTOM w miejscach oznaczonych +/–. Należy pamiętać, by nie przekroczyć dopuszczalnej wartości napięcia zasilającego (5 V), gdyż mogłoby to uszkodzić nasze urządzenie.
Poprawnie zmontowany układ nie wymaga żadnych regulacji i powinien działać tuż po włączeniu zasilania.
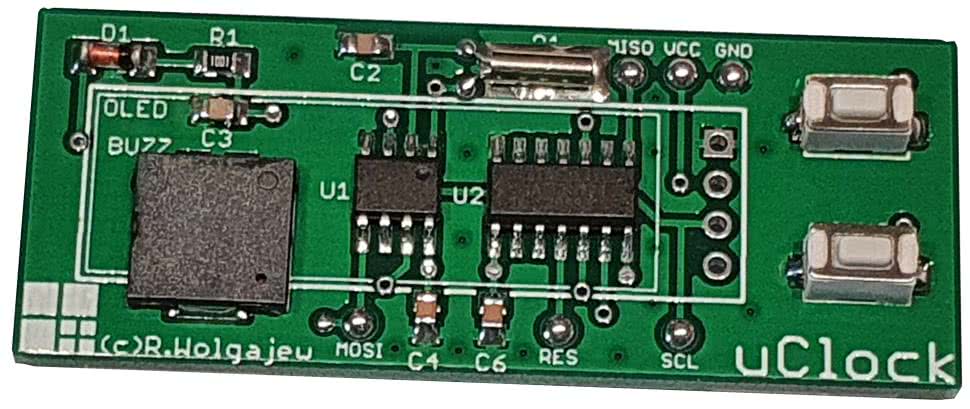
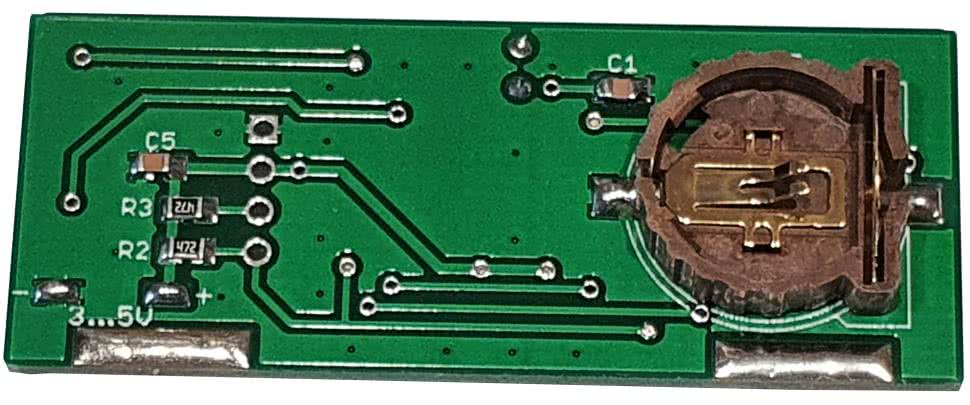
Na obwodzie drukowanym urządzenia, przy jego dolnej krawędzi, po stronie BOTTOM przewidziano dwa szerokie pola lutownicze (w kształcie prostokątów) niepokryte maską lutowniczą. Można do nich przylutować kawałek laminatu stanowiący niejako stopkę urządzenia. Na fotografii 4 pokazano zmontowane urządzenie (od strony TOP) tuż przed przylutowaniem wyświetlacza OLED, zaś na fotografii 5 pokazano to samo urządzenie od strony BOTTOM.
Obsługa
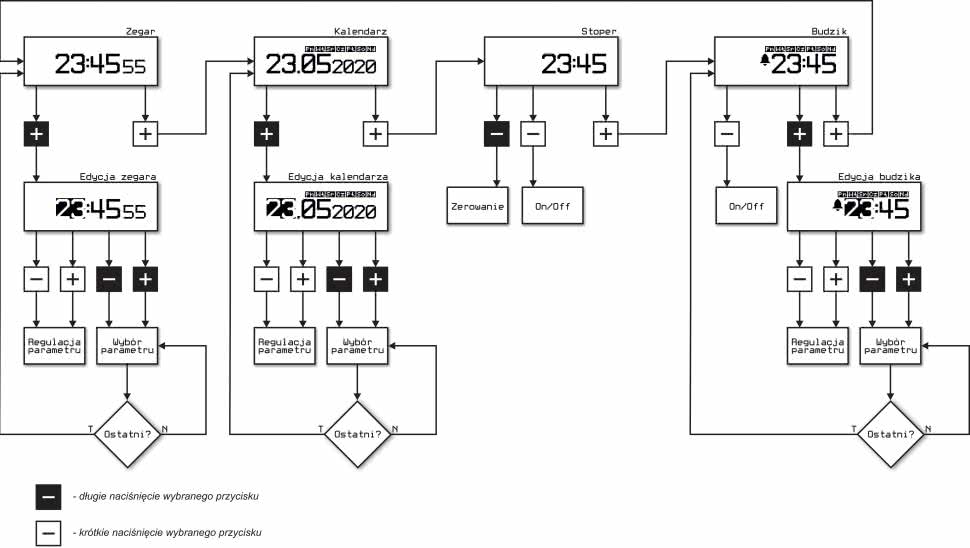
Konstruując program obsługi aplikacji, kierowałem się jednym z początkowych założeń, a mianowicie prostotą obsługi. Dlatego zdecydowałem się na zastosowanie wyłącznie dwóch przycisków sterujących, oznaczonych umownie PLUS i MINUS. Dzięki zaimplementowaniu obsługi krótkiego i długiego wciśnięcia przycisków możliwe stało się znaczne uproszczenie sposobu obsługi urządzenia, nie wpływając negatywnie na ergonomię lub, co gorsza, na funkcjonalność urządzenia.
Urządzenie μClock dysponuje czterema, w pełni konfigurowalnymi, funkcjonalnościami:
- zegara z sekundnikiem,
- kalendarza z dniem tygodnia,
- stopera,
- budzika z planem tygodniowym.
Wszystkie te funkcjonalności obsługuje się w bardzo intuicyjny sposób za pomocą wyłącznie dwóch klawiszy funkcyjnych. Klawisze przyjmują różne funkcjonalności zależne od trybu pracy, w jakim urządzenie się znajduje. Sposób obsługi wraz z zaznaczeniem funkcji każdego z klawiszy (PLUS i MINUS) pokazano na rysunku 6.
CKSEL3...0: 0010
SUT1...0: 10
CKDIV8: 0
CKOUT: 1
DWEN: 1
EESAVE: 0
Warto podkreślić, że konstruując graficzny interfejs użytkownika (GUI) naszego urządzenia, kładłem bardzo duży nacisk na przejrzystość prezentowanych informacji i ich walory estetyczne. Właśnie dlatego posłużono się wyłącznie dwoma krojami czcionek ekranowych o prostej i eleganckiej formie, co w połączeniu z niezaprzeczalnymi zaletami zastosowanego wyświetlacza OLED postawiło na dość wysokim poziomie osiągnięty efekt końcowy. Całość prezentuję się po prostu ładnie, a ergonomia i łatwość obsługi urządzenia potęgują te walory.
Robert Wołgajew, EP
- R1: 1 kΩ
- R2, R3: 4,7 kΩ
- C1, C2: 12 pF
- C3: 100 pF
- C4…C6: 100 nF
- U1: MCP79410-I/SN (SO08)
- U2: ATtiny84A (SOIC14)
- D1: BAS85.115 (MINIMELF)
- OLED: wyświetlacz OLED 128×32px, 0,91", sterownik SSD1306, magistrala I2C, wymiary 38×12 mm
- Q1: rezonator kwarcowy zegarkowy 32768 Hz
- PLUS, MINUS: mikroprzycisk SMD typu DTSM31NB
- BATT: gniazdo baterii CR1220 typu CONNFLY DS1092-12-N8S
- BUZZ: przetwornik piezoelektryczny typu LPT9018BS-HL-03-4.0-12-R
- VCC: bateria CR1220












