 Zaloguj
Zaloguj




- wbudowany konwerter USB-UART do komunikacji poprzez terminal SSH,
- wbudowany 2-kanałowy, 16-bitowy przetwornik ADC,
- wbudowany 4-bitowy, dwukierunkowy ekspander wejść/wyjść cyfrowych oraz ekspander z wyjściami PWM,
- wbudowana pamięć EEPROM oraz czujnik temperatury,
- praktyczna i wygodna konstrukcja w formie USB Stick.
Najważniejszym elementem modułu jest konwerter USB/UART, w którym zastosowano układ FT234X (U5) który służy do obsługi komunikacji terminalu SSH pomiędzy Pi Zero a podłączonym PC, przy wykorzystaniu portu szeregowego, dostępnego na wyprowadzeniach GPIO Raspberry Pi. Dzięki temu mamy komunikację i możliwość zarządzania RPi przez terminal, a jedyne złącze USB pozostaje dostępne dla użytkownika. Nie ma potrzeby użycia droższego RPi ZeroW z wbudowanym Wi-Fi. Moduł pobiera zasilanie z komputera PC, bezpośrednio poprzez wtyk USB. Zasilanie 5 V wraz z sygnałami USB D+/D– z punktów lutowniczych, dostępnych na płytce RPi Zero, doprowadzone są do gniazda USB, umożliwiając podłączenie np. pendrive'a, karty sieciowej, itp.
Budowa i działanie
Schemat ideowy modułu został pokazany na rysunku 1. Na płytce znalazło się miejsce na układy z interfejsem I2C, obsługujące typowe GPIO. Układ U1 typu MCP3426 pełni funkcję przetwornika AD z dwoma wejściami, o zakresie mierzonego napięcia 0…2,048 V i maksymalnej rozdzielczości 16 bitów. Sygnał analogowy ze złącza A01, po filtracji realizowanej za pomocą elementów R1, R2, C1, C2, doprowadzony jest bezpośrednio do układu U1, typu MCP3426. Ma on ustalony adres I2C o wartości 0x68 (dla MCP3426A0). Zwracam uwagę na konflikt adresów z często używanym układem RTC typu DS1338. Jeżeli planujemy zastosować na magistrali I2C także zewnętrzny RTC, należy wykorzystać w miejsce U1 układ o zaprogramowanym fabrycznie adresie, różnym od 0x68, np. MCP3426A1 do MCP3246A7.
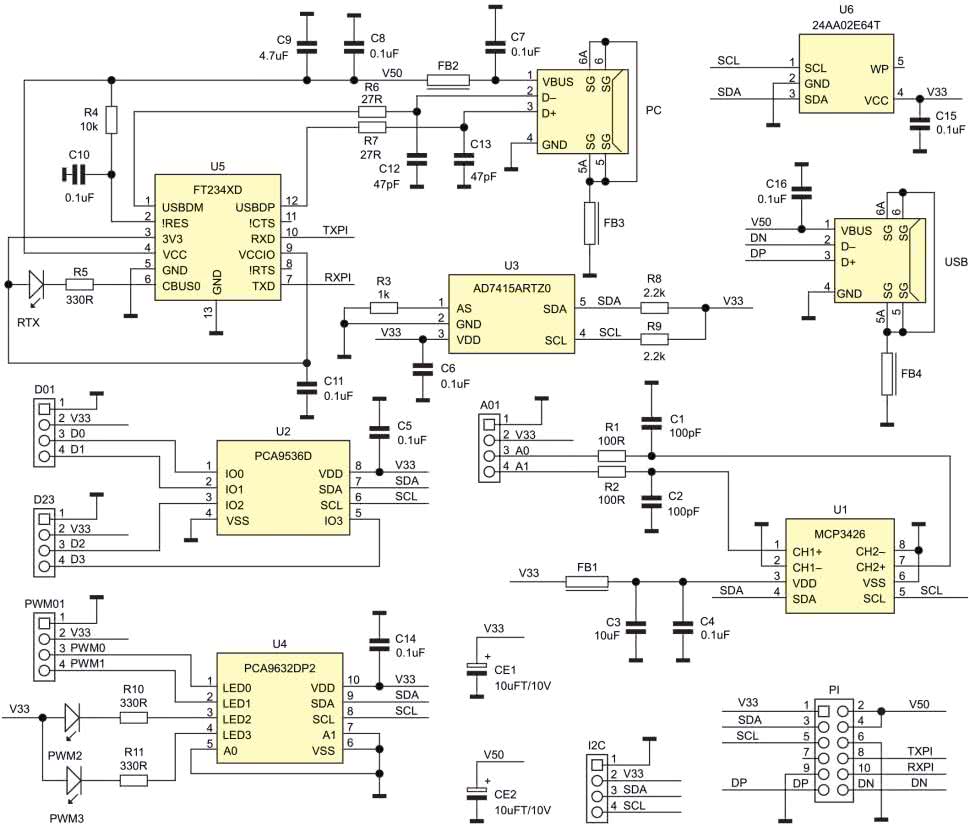
Układ U2 typu PCA9536D jest 4-bitowym, dwukierunkowym ekspanderem wejść/wyjść cyfrowych. Wyprowadzenia U2 IO0…3 dostępne są na złączach D01, D23. Układ ma ustalony adres I2C o wartości 0x41. Układ U4 typu PCA9632 jest ekspanderem umożliwiającym sterowanie bezpośrednie LED małej mocy, a w naszej aplikacji pełni funkcje wyjść PWM. Wyprowadzenia LED0 i LED1 dostępne są na złączu PWM01. Wyprowadzenia LED2 i LED3 sterują wbudowanymi diodami LED opisanymi jako PWM2 i PWM3. Układ U4 ma ustalony wyprowadzeniami A0 i A1 adres równy 0x60.
Na płytce znalazło się miejsce także na termometr I2C, U3 typu AD7415, umożliwiający pomiar temperatury płytki, dostępny pod adresem 0x49. U6 typu 24AA02E64 jest pamięcią EEPROM (adres 0x50…0x57), w której oprócz obszaru dostępnego dla użytkownika zapisany jest trwale unikalny 8-bajtowy ciąg wartości, który może służyć jako adres MAC lub może znaleźć zastosowanie jako klucz identyfikacyjny/autoryzacyjny dla RPi Zero.
Wszystkie układy zasilane są napięciem 3,3 V z RPi Zero i z takimi poziomami logicznymi mogą współpracować. Płytkę uzupełniają kondensatory odsprzęgające i rezystory R8 i R9 polaryzujące magistralę I2C. Ze względu na niewielką ilość miejsca jako złącza IO wykorzystane zostały SM04B_SRSS_TB o rozstawie 1,0 mm, stosowane także w modułach I2C zgodnych z QWIIC.
Montaż i uruchomienie
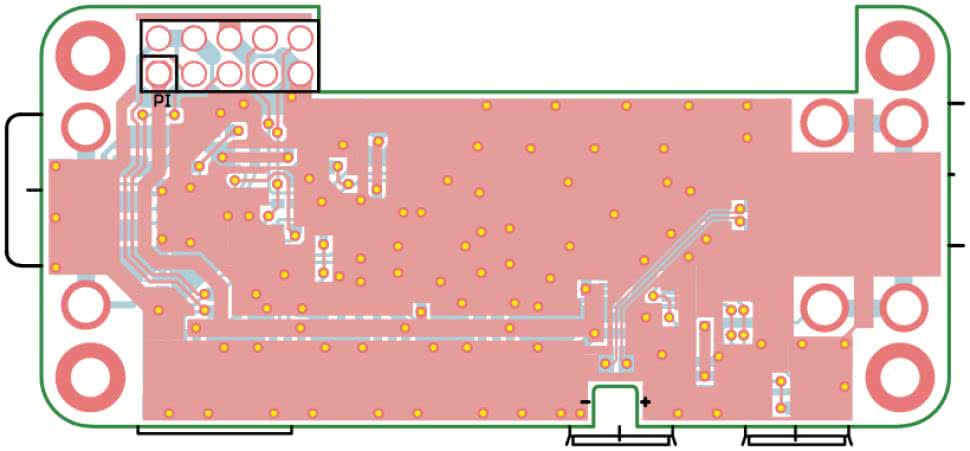
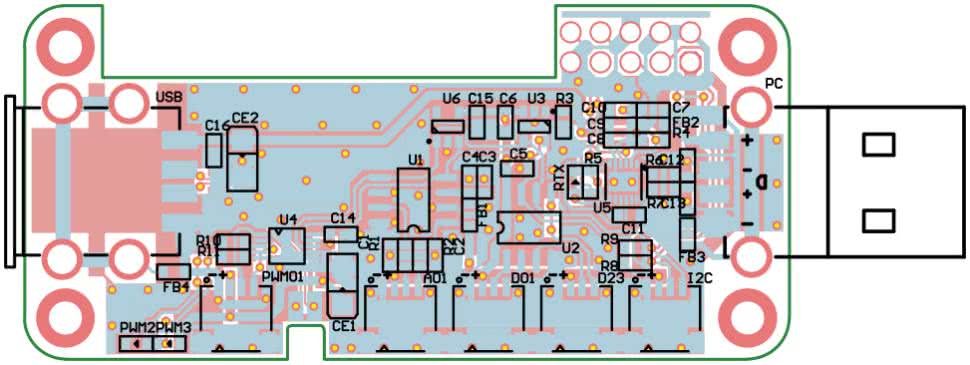
Moduł zmontowany jest na dwustronnej płytce drukowanej, zgodnej mechanicznie z RPi Zero. Schemat płytki, wraz z rozmieszczeniem elementów, pokazują rysunki 2 i 3, a zmontowany moduł został pokazany na fotografii tytułowej. Sposób montażu jest klasyczny i nie wymaga opisu.
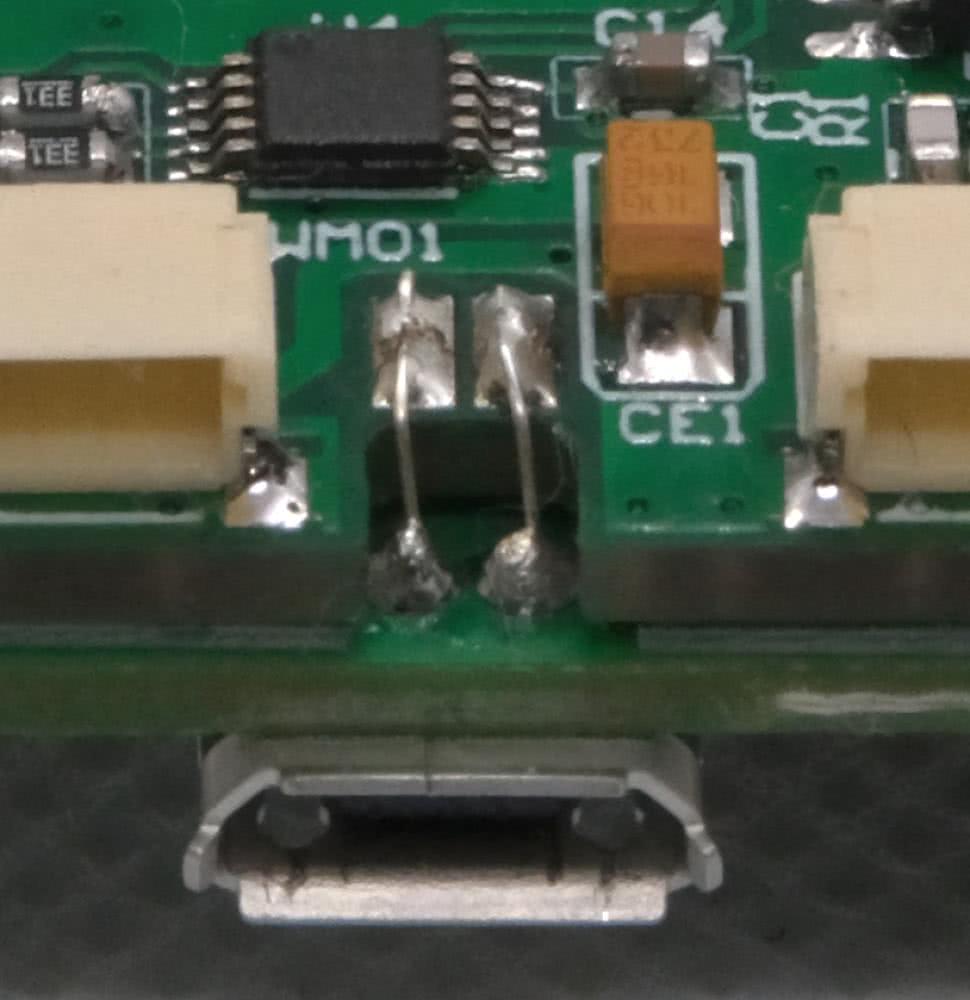
Moduł jest montowany do RPi Zero za pomocą wkrętów M2.5. Pomiędzy Stickiem a RPI Zero koniecznie jest umieszczenie płytki izolacyjnej, wyciętej z pleksi lub innego materiału, o grubości 0,25…0,5 mm, w kształcie RPi Zero. Płytka izolacyjna z odpowiednio wyciętymi otworami i szczelinami w okolicy GPIO zapobiega zwarciom pomiędzy stykającymi się mechanicznie obwodami. Po wlutowaniu należy skrócić wyprowadzenia ustalające złącza USB/PC, aby nie wystawały ponad płytkę i nie uszkodziły izolacji pomiędzy płytkami. W modelu do RPI Zero wlutowane jest także pełne złącze GPIO, ponieważ często korzystam z różnych innych modułów HAT, które mocowane są do dystansów M2.5×10. Po skręceniu płytki z RPi, w miejscach wykorzystanych przez PI GPIO należy kroplą cyny połączyć pola lutownicze obu płytek. Wyprowadzenia złącza wystające ponad płytkę RPi Zero ułatwiają lutowanie, ale należy zwrócić uwagę na ewentualne zwarcia pomiędzy pinami. Połączenie interfejsu USB wymaga użycia krótkich odcinków odizolowanego kynaru i ostrożnego przylutowania ich bezpośrednio do punktów testowych USB na RPI Zero, co pokazuje fotografia 1.
Jeżeli nie przewidujemy wykorzystania GPIO w miejscach punktów lutowniczych, należy umieścić kawałki kynaru i zlutować płytki z dwóch stron, zapewniając kontakt. Brak złącza GPIO skutkuje niewielką wysokością modułu. Decyzję o jego wlutowaniu pozostawiam użytkownikowi.
Po zmontowaniu modułu konieczne jest skonfigurowanie FT234 za pomocą oprogramowania FT Prog ze strony FTDI. Po detekcji układu (Scan & Parse F5) wymagana jest zmiana funkcji (Hardware Specyfic\CBUS Signals) pinu C0 na TX&RXLED. Wbudowana LED RTX będzie wtedy sygnalizowała pełną komunikację pomiędzy PC a RPi. Po zmianie ustawień (rysunek 4) należy układ zaprogramować (CTRL+P) i zrestartować port USB (Cycle Ports).

Prawidłowo zmontowany moduł nie wymaga uruchamiania, konieczne jest tylko niewielkie dostosowanie systemu operacyjnego. Najlepszym wyborem dla Sticka jest Raspbian w wersji Lite. Po zainstalowaniu systemu na karcie SD należy edytować plik config.txt:
- załączyć obsługę I2C: dtparam=i2c_arm=on,
- załączyć obsługę UART: enable_uart=1.
W pliku cmdline.txt:
- ustawić konsolę na port szeregowy: console=serial0, 115200 console=tty1.
Dostęp do obu plików jest możliwy bezpośrednio w głównym katalogu, po instalacji systemu na karcie SD.
Na komputerze PC należy zainstalować terminal, np. Putty i skonfigurować połączenie na port szeregowy (pod adresem COM, z którym zgłosi się FT234), z parametrami 115200,8,N,1. Po uruchomieniu sesji powinno być możliwe zalogowanie się do RPi na domyślnych ustawieniach pi/raspberry (co należy bezwzględnie zmienić, korzystając z raspiconfig). Teraz, o ile nie korzystamy z RPi Zero, przyda się karta sieciowa podłączona do portu USB, ze względu na konieczność pobrania kilku narzędzi i aktualizacji systemu:
sudo apt-get update
sudo apt-get upgrade
Potrzebne będą narzędzia i2ctools, interpreter Pythona i biblioteki smbus, time.
sudo apt-get update
sudo apt-get install python-smbus python3-smbus python-dev python3-dev i2c-tools
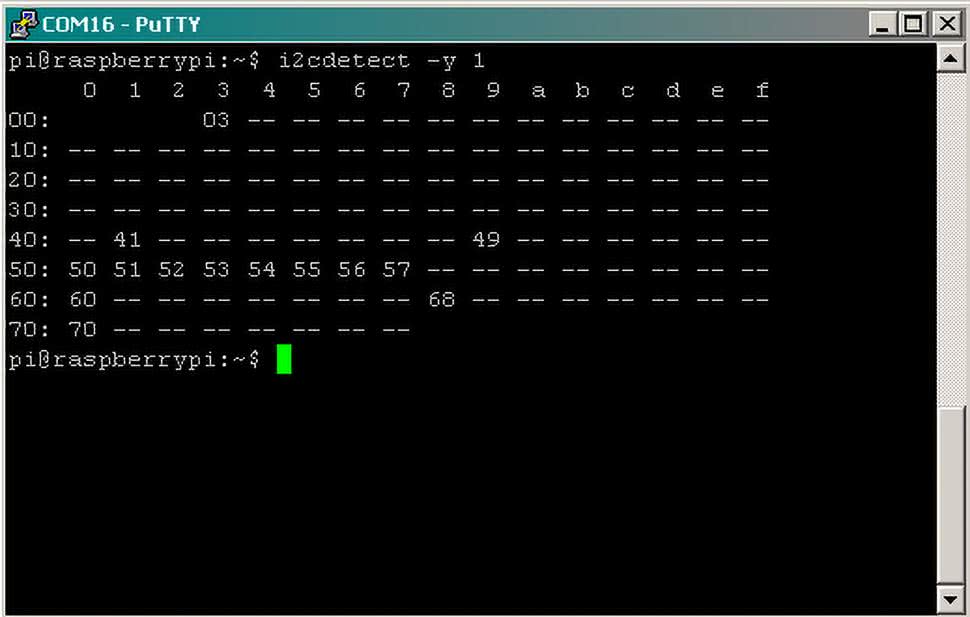
Po restarcie systemu, dla sprawdzenia poprawności detekcji układów, wydajemy polecenie (rysunek 5):
sudo i2cdetect -y 1
Dla sprawdzenia poszczególnych układów przygotowałem proste skrypty. Przetwornik ADC MCP3426 można przetestować skryptem mcp3426.py z listingu 1.
import smbus
import time
from time import sleep
print "\nMCP4326 ADC Test\n"
# Get I2C bus
bus = smbus.SMBus(1)
# MCP3426 0x68 CH1
bus.write_byte(0x68, 0x10)
time.sleep(0.1)
# MCP3426 0x68 Read 0x00 3 bytes
data = bus.read_i2c_block_data(0x68, 0x00, 3)
adch = data[0]
print "ADCH 1 : %d" %adch
adcl = data[1]
print "ADCL 1 : %d" %adcl
adc = (data[0] & 0x0F) * 256 + data[1]
print "Analog Input 1: %d" %adc
# MCP3426 0x68 CH2
bus.write_byte(0x68, 0x30)
time.sleep(0.1)
# MCP3426 0x68 Read 0x00 3 bytes
data = bus.read_i2c_block_data(0x68, 0x00, 3)
adch = data[0]
print "ADCH 2 : %d" %adch
adcl = data[1]
print "ADCL 2 : %d" %adcl
adc = (data[0] & 0x0F) * 256 + data[1]
print "Analog Input 2: %d" %adc
bus.close()
print”\nQuit\n”
Po podłączeniu do wejść A0, A1, np. dzielnika z potencjometrem (maksymalne napięcie na wejściu 2,048 V) i uruchomieniu skryptu powinny zostać odczytane wartości napięć na jego wejściach. Do sprawdzenia ekspandera GPIO PCA9536 użyjemy skryptu pca9536.py (listing 2), kolejno zmieniającego stan wyjść układu, dostępnych na złączach D01, D23.
import smbus
import time
from time import sleep
print "\nPCA9536 GPIO Test\n"
# Get I2C bus
bus = smbus.SMBus(1)
# PCA9536 0x41
bus.write_byte_data(0x41, 0x03, 0x00)
bus.write_byte_data(0x41, 0x01, 0x01)
time.sleep(0.1)
x=5;
# PCA9536 0x41 Write Output
print " Out 1 set"
bus.write_byte_data(0x41, 0x01, 0x01)
time.sleep(x)
print " Out 2 set"
bus.write_byte_data(0x41, 0x01, 0x02)
time.sleep(x)
print " Out 3 set"
bus.write_byte_data(0x41, 0x01, 0x04)
time.sleep(x)
print " Out 4 set"
bus.write_byte_data(0x41, 0x01, 0x08)
time.sleep(x)
print " Out ALL set"
bus.write_byte_data(0x41, 0x01, 0x0F)
time.sleep(x)
print " Out ALL reset"
bus.write_byte_data(0x41, 0x01, 0x00)
bus.close()
time.sleep(x)
print “\nQuit\n”
Ekspander PWM PCA9632 sprawdzimy skryptem pca9632.py (listing 3).
import smbus
import time
from time import sleep
print "\nPCA9632 PWM Test\n"
# Get I2C bus
bus = smbus.SMBus(1)
# PCA9632 0x60 config
bus.write_byte_data(0x60, 0x00, 0x00)
bus.write_byte_data(0x60, 0x01, 0x14)
bus.write_byte_data(0x60, 0x02, 0x00)
bus.write_byte_data(0x60, 0x03, 0x00)
bus.write_byte_data(0x60, 0x04, 0x00)
bus.write_byte_data(0x60, 0x05, 0x00)
bus.write_byte_data(0x60, 0x06, 0xFF)
bus.write_byte_data(0x60, 0x07, 0x00)
bus.write_byte_data(0x60, 0x08, 0xAA)
bus.write_byte_data(0x60, 0x09, 0xE2)
bus.write_byte_data(0x60, 0x0A, 0xE4)
bus.write_byte_data(0x60, 0x0B, 0xE8)
bus.write_byte_data(0x60, 0x0C, 0xE0)
time.sleep(0.1)
x=5;
# PCA9632 PWM
print " PWM Out 1 set 25%"
bus.write_byte_data(0x60, 0x02, 0x3F)
print " PWM Out 2 set 50%"
bus.write_byte_data(0x60, 0x03, 0x7F)
print " PWM Out 3 set 75 - LED 25%"
bus.write_byte_data(0x60, 0x04, 0xBD)
print " PWM Out 4 set 100% - LED 0%"
bus.write_byte_data(0x60, 0x05, 0xFF)
time.sleep(x)
print " PWM Global"
bus.write_byte_data(0x60, 0x08, 0xFF)
bus.write_byte_data(0x60, 0x06, 0x3F)
time.sleep(x)
bus.write_byte_data(0x60, 0x06, 0xBD)
time.sleep(x)
print " BLINK Global"
bus.write_byte_data(0x60, 0x08, 0xFF)
bus.write_byte_data(0x60, 0x01, 0x34)
bus.write_byte_data(0x60, 0x07, 0x0F)
time.sleep(x)
print " All 0% - LED ON"
bus.write_byte_data(0x60, 0x01, 0x14)
bus.write_byte_data(0x60, 0x08, 0xAA)
bus.write_byte_data(0x60, 0x02, 0x00)
bus.write_byte_data(0x60, 0x03, 0x00)
bus.write_byte_data(0x60, 0x04, 0x00)
bus.write_byte_data(0x60, 0x05, 0x00)
time.sleep(x)
print " LED OFF"
bus.write_byte_data(0x60, 0x04, 0xFF)
bus.write_byte_data(0x60, 0x05, 0xFF)
bus.close()
print "\nQuit\n"
Steruje on wyjściami PWM dostępnymi na złączu PWM01 i wbudowanymi LED. Skrypt odczytujący temperaturę zmierzoną przez AD7415.py pokazuje listing 4.
import smbus
print "\nAD7415-0 0x49 Temp\n"
# Get I2C bus
bus = smbus.SMBus(1)
# AD7415 read 8-bytes temp
temp = bus.read_byte_data(0x49, 0x00)
print"temp: (‘C): "
print(temp)
bus.close()
print “\nQuit\n”
Testowanie pamięci 24AA02E64 można wykonać, zarówno korzystając z i2ctools, jak i ze skryptu 24AA02E064.py (listing 5).
import smbus
print "\n24AA02E64 MAC Dump\n"
# Get I2C bus
bus = smbus.SMBus(1)
# 24AA02E64 read last (0xF8 offset) 8-bytes MAC ROM
macblock = bus.read_i2c_block_data(0x50, 0xF8, 0x08)
print"MAC (hex): "
print([‘{:02x}’.format(x) for x in macblock])
print"MAC (dec): "
print(macblock)
bus.close()
print “\nQuit\n”
Skrypt odczytuje ostatnie osiem bajtów zawierających adres MAC. Zawartość całej pamięci można odczytać poleceniem:
i2cdump -y 1 0x50 i
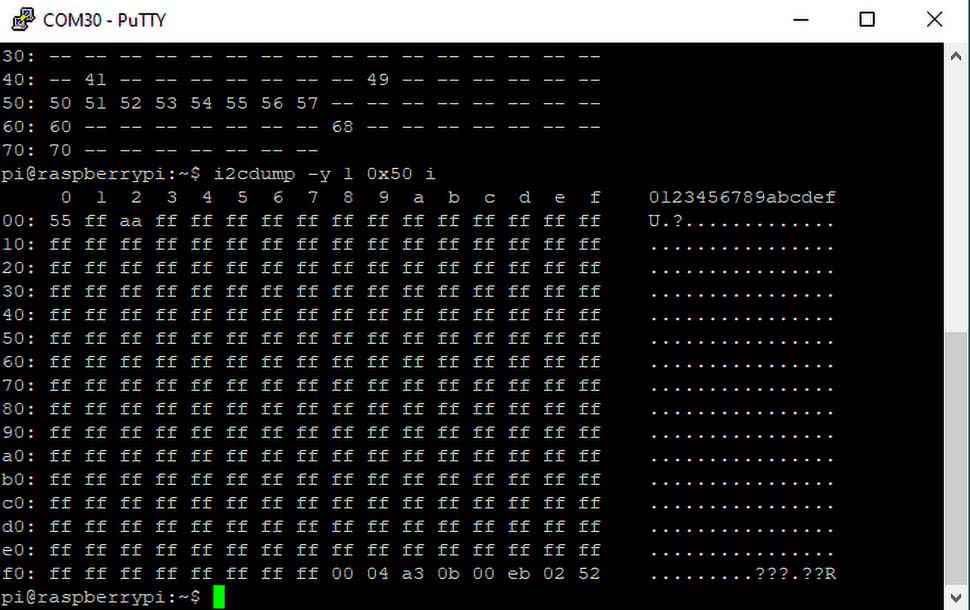
Rezultat pokazuje rysunek 6. Do zapisu komórki można użyć polecenia i2cset, przykładowo zapisując pod adres EEPROM 0x50 i pod adres 0x00 wartość 0xA5:
i2cset -y 1 0x50 0x00 0xA5
Do odczytu z adresu 0x50 i spod adresu 0x00 używamy polecenia:
i2cget -y 1 0x50 0x00
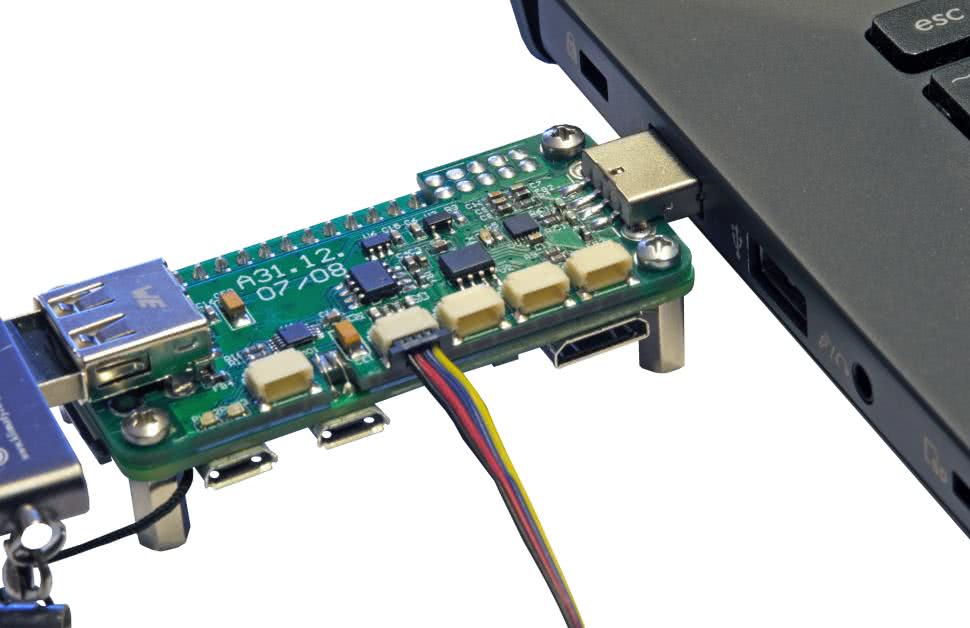
Rezultat powinien zwrócić wartość zapisaną wcześniej – 0xA5. Jeżeli wszystkie testy przebiegły pomyślnie, można zastosować moduł we własnych aplikacjach (fotografia 2). Powodzenia!
Adam Tatuś
adam.tatus@ep.com.pl
- R1, R2: 100 Ω
- R3: 1 kΩ
- R4: 10 kΩ
- R5, R10, R11: 330 Ω
- R6, R7: 27 Ω
- R8, R9: 2,2 kΩ
- C1, C2: 100 pF SMD 0603
- C3: 10 μF SMD 0603
- C4…C8, C10, C11, C14…C16: 0,1 μF SMD 0603
- C9: 4,7 μF SMD 0603
- C12, C13: 47 pF SMD 0603
- CE1, CE2: 10 μF/10 V SMD 3216 tantalowy
- PWM2, PWM3: dioda led SMD 0603 zielona
- RTX: dioda led SMD 0603 czerwona
- U1: MCP3426 (SO8)
- U2: PCA9536D (SO8)
- U3: AD7415ARTZ0 (SOT-23-5)
- U4: PCA9632DP2 (TSSOP10_050)
- U5: FT234XD (DFN12_045)
- U6: 24AA02E64T (SOT-23-5)
- A01, D01, D23, I2C, PWM01: złącze JST 4 pin 1 mm kątowe
- FB2: ferryt WE-TMSB SMD 1,5 A WE74269262601
- FB1, FB3, FB4: ferryt WE-CBF SMD 0,5 A WE742792653
- PC: wtyk USB A SMD
- USB: gniazdo USB A SMD












