 Zaloguj
Zaloguj




- funkcja emulatora i skanera 1-Wire,
- obsługa prędkości standardowej i overdrive,
- akceptacja napięcia magistrali do 15 V,
- wbudowany enkoder i wyświetlacz LCD 20×4,
- komunikacja przez USB z programem terminala VT100.
Urządzenie umożliwia emulowanie układów z interfejsem 1-Wire, także tych trudno dostępnych i kosztownych, a nawet takich, które nie istnieją. Opcje synchronizacji mogą przydać się przy analizowaniu przebiegów przez proste oscyloskopy lub rejestratory logiczne, ponieważ synchronizacja może być wywołana sygnałem reset, presence lub wybranym rozkazem, czy też zgodnością adresu albo danej. W przypadku bardziej zaawansowanych oscyloskopów funkcje takie również mają istotne znaczenie, ponieważ przyrządy z analizą protokołu 1-Wire są rzadkością.
Emulując popularny czujnik temperatury typu DS18B20 możemy łatwo ustawić temperaturę 100°C, a za chwilę –30°C. Możemy również ustawić wartości spoza zakresu układu DS18B20, np. 300°C. Przy uruchamianiu oprogramowania z układami only add (np. OTP EPROM) zaoszczędzimy na układach, które mogą być kosztowne.
Funkcje emulatora
- ustawienie dowolnego identyfikatora układu,
- automatyczne obliczanie CRC identyfikatora,
- emulacja prędkości standardowej i overdrive,
- akceptacja napięć na magistrali do 15 V (emulacja pamięci EPROM),
- wbudowana emulacja 6 układów:
- numerów seryjnych DS1990, DS2400, DS2401, DS2411 wszystkie komendy (ReadRom, SkipRom, MatchRom),
- termometru DS18B20 łącznie z EEPROM i alarmami, Search Alarm,
- EEPROM DS2431 łącznie z ustawianiem zabezpieczenia przed zapisem (do resetu mikrokontrolera),
- zgłaszanie przerwań/alarmu przez slave,
- emulowane EPROM, EEPROM „resetują” się do wartości fabrycznych po restarcie emulatora, zapewniając im „wieczny żywot”.
Funkcje skanera
- pułapki na rozkazie i/lub rodzinie
- układów,
- synchronizacja oscyloskopu: reset, presence, rozkaz, rodzina układów,
- wyświetlanie danych na terminalu VT100 w kolorze z prędkością 500 kb/s (FT220),
- wyróżnianie kolorem resetu, presence, komendy, kodu rodziny, danych z mastera i slave, poprawnej lub złej crc,
- opis tekstowy komendy i kodu rodziny,
- akceptacja napięć na magistrali do 15 V (emulacja pamięci EPROM).
Czym jest tryb overdrive?
Standardowa prędkość transmisji wynosi: 15,4 kbps (max), a overdrive: 125 kbps (max). Zwiększona prędkość osiągnięto przez skrócenie czasu sygnału reset oraz nadawania i odbierania bitu. Dodatkowo przepustowość wzrosła dzięki rozkazowi RESUME (jeden bajt), który zastępuje MATCHROM (dziewięć bajtów) w sytuacji gdy slave był już wcześniej zaadresowany. Przejście do trybu overdrive następuje po wydaniu rozkazu: OverdriveSKIPROM lub OverdriveMATCHROM. Wyjście z tego trybu następuje po wykonaniu resetu w standardowej prędkości (reset w prędkości overdrive nie zmienia ustawienia).
Wykrywanie sygnału RESET i generowanie sygnału PRESENCE
Na początek, kilka ważnych zagadnień dotyczących realizacji kluczowych funkcji programu. Najprostsza procedura rozpoznawania sygnału reset jest realizowana w obsłudze przerwania od opadającego zbocza sygnału i przebiega w następujący sposób:
czekaj, aż magistrala powróci do stanu wysokiego,
- jeśli czas >460 μs generuj presence,
- jeśli >60 μs to odebrano zero,
- w przeciwnym wypadku odebrano jeden.
Podstawową wadą procedury jest to, że przerwanie „wisi” przez czas generowania zera przez host. W tym czasie program główny jest zawieszony. Ponadto, gdy magistrala zostanie zwarta program zostanie zatrzymany, chyba że zadziała watchdog.
Host, po sygnale reset, oczekuje na sygnał presence. Pomiędzy reset a presence magistrala powinna przejść w stan wysoki na 30 μs, a przy opisanym wcześniej algorytmie tak nie jest i inne układy slave mogą źle zinterpretować sygnał reset lub wygenerować presence zbyt późno.
Problem zawieszenia programu głównego na czas pomiaru sygnałów reset i presense mogą rozwiązać timery, ale jaki czas ustawić jako reset? Jeśli ustawimy 480 μs, a host będzie generował krótszy sygnał, to nigdy nie wykryjemy sygnału reset. Jeśli ustawimy zbyt krótki czas to procedura przerwania będzie niepotrzebnie blokowała program główny (w przerwaniu musimy czekać na narastające zbocze sygnału). Rozwiązania są dwa:
- Czas sygnału reset będzie analizowany w przerwaniu od narastającego zbocza sygnału. Aby nie kolidowało to z obsługą przerwania od obsługi bitu można te przerwania wyłączyć do czasu wygenerowania presence.
- Czas trwania sygnału reset będzie mierzony. Przykład programowy pokazano na listingu 1.
INTERRUPT( TIMER3_COMPA_vect )
{
long static srednia=0;
word tim;
tim = TCNT_OW;
// Jeśli timer przepełniono a magistrala jest w stanie niskim
if ( !WIRE1_RD ) {
// to mamy reset (przepełnienie jest na 440us a nie 460)
// Czekamy, aż master zwolni magistralę 1-wire
while( !WIRE1_RD ) {
// Jeśli zbyt długo to wyjdź
if ( tim > microSecondsOW( TIM_1W_RST*1.5 ) ) return;
INIT_ZMIENNE; // Wyłączenie overdrive
WIRE1_RESET; // Początek sygnału ACK
START_TIMER_OW; // Uruchamiamy odliczanie
TIFR_OW |= _BV(OCFC_OW);// Kasuj flagę przerwania
// Odblokowanie przerwań od porównania z Comp C (240us)
TIMSK_OW |= _BV(OCIEC_OW);
// Wyliczanie średniej czasu sygnału reset
// Jeśli nie skończono jeszcze pomiarów
if ( RstTigMeasurement ) {
if ( tim > microSecondsOW( 400 ) &&
tim < microSecondsOW( 500 ) ) {
srednia += tim;
}
if ( !--RstTigMeasurement ) {
srednia /= DEFRSTMEASURMENT;
// Do timera nie można wpisać czasu odczytanego z CNTx
srednia -= microSecondsOW( 5 );
// ponieważ od chwili wygenerowania IRQ do odczytania
// wartości timera minął jakiś czas i CNT uległo zmianie
// Czas ten zależny jest od liczny rejestrów odłożonych
// na stosie
// oraz mógłbyć zakłócony przez inne przerwania
TimRstTrigger = srednia;
OCRA_OW = TimRstTrigger; // Nowy czas przerwania
}
}
}
// Timer przepełniony a magistrala w wysokim, zatrzymaj więc go
else
{
STOP_TIMER_OW;
}
}
Problem „zawieszania” programu głównego na czas rozpoznawania sygnału reset, generowania presence i zera można rozwiązać timerami. Na rysunku 1 widać, że program główny (niebieski przebieg) pracuje, w czasie generowania sygnałów.
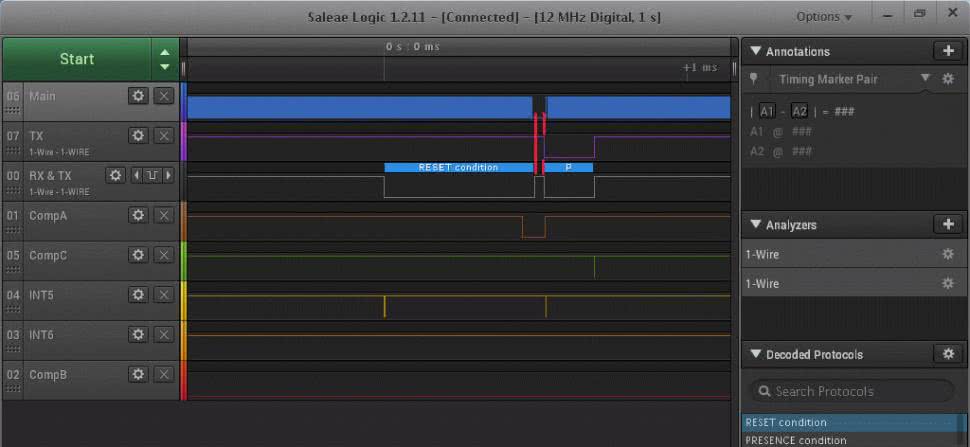
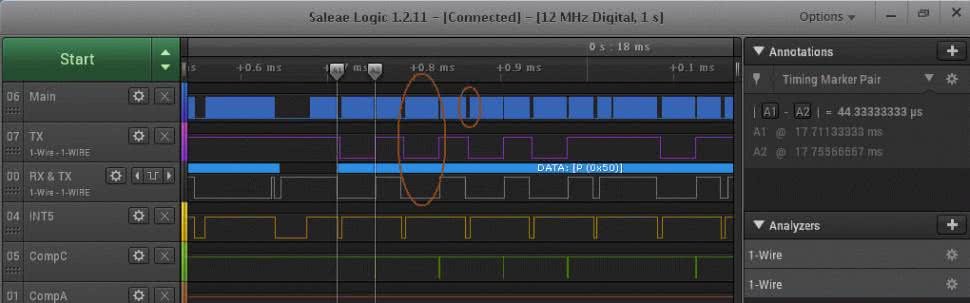
Widać wyraźną przerwę oczekiwania na koniec resetu, następnie opóźnienie 30 μs oraz start timera generującego sygnał presence. Podczas generowania bitu o wartości zero nie trzeba czekać na koniec sygnału, więc program główny jest zatrzymywany na krócej (rysunek 2). Widoczne są tylko krótkie przerwy w działaniu programu głównego (4,5 μs) po opadającym zboczu sygnału na magistrali.
W trybie overdrive odczyt bitu powinien nastąpić 1 μs po sygnale strobującym odczyt, a okno bitu trwa 7,6 μs. Biorąc pod uwagę, że przy 16 MHz, wejście w IRQ to około 0,6 μs (dla układów z pamięcią flash >128 kB trochę dłużej, ponieważ procesor odkłada 3 a nie 2 bajty adresu powrotu) a operacje na stosie takie jak push Rx, eor r1,r1 oraz push rejestru stanu i RAMPZ dla procesorów z pamięcią ponad 64 kB dają łącznie 2,3 μs, nie ma szansy na czas wystawić bitu zero. Jakim więc sposobem rozwiązano ten problem? Przejście w overdrive powoduje:
- Zezwolenie na IRQ tylko od INT4 (overdrive) i Timera3 (wykrywającego reset i generującego presence). Pozostałe przerwania (Timer0, USART, impulsator) są zablokowane.
- „Wieczna pętla” z której wyjście nastąpi po zmianie trybu z overdrive na standardową prędkość (reset w standardowej prędkości).
- Po wyjściu z „wiecznej pętli” następuje wyłączenie przerwań od INT4 (overdrive) oraz przywrócenie wcześniej zawieszonych (INT5, Timer0, USART, impulsator).
Dodatkowo przerwanie INT dla overdrive zadeklarowano z flagą NAKED. Wcześniejsze wyzerowanie rejestru R1 (po wejściu w IRQ od prędkości standardowej) daje gwarancję, że ma on wartość zero i nie trzeba tego robić. Dzięki temu wejście w przerwanie trwa niecałe 0,6 μs.
Niestety zanim program przetestuje jaki bit wystawić na magistralę mija około 2 μs przy taktowaniu 22 MHz, przy 14,7 MHz jest to 3,5 μs więc za późno aby wystawić bit. Jak rozwiązano ten problem? Wiedząc jakiej wartości będzie wysyłany bit podczas kolejnego slotu odczytu ustawiam odpowiednio flagę FL_SEND_ZERO. W kolejnym przerwaniu pierwszą czynnością jest sprawdzenie tej flagi i w razie potrzeby ustawienie magistrali w stan niski. Dzieje się to 1,4 μs po opadającym zboczu sygnału strobującego odczyt wiec jest jeszcze zapas 0,6 μs – prawie dwa rozkazy. Obsługa przerwania trwa niecałe 3 μs przy 22 MHz (6 μs przy 14,7) więc jest zapas czasu na wyjście z przerwania i oczekiwanie na następne.
Procedura wygląda poprawnie gdy trwa transfer danych ale co z pierwszym bitem? Czy milcząco założono, że będzie on równy jeden? Nie, po przejściu w tryb wysyłania danych do hosta jest odpowiednio ustawiana flaga FL_SEND_ZERO na podstawie pierwszego bitu bajtu do wysłania. Schemat występowania przerwań pokazuje rysunek 3.

W przerwaniach wykonuje się kod emulacji oznaczony ciemnozielonym kolorem. Kolor czerwony to przerwanie od komparatora A (wykrycie reset), pomarańczowy komparator B (reset overdrive). Oprogramowanie przerwania comB stwierdza czy impuls resetu trwał 70 μs czy 440 μs. Jeśli 440 μs postępuje tak jak w przypadku przerwania od komparatora A (czerwone tło z białą czcionką). Podczas procedur emulacji w przerwaniu INT5, po zdekodowaniu rozkazu skip lub match overdrive, uruchamiany jest tryb overdrive (zezwolenie na INT4 i CompareB, blokada INT5). Tryb ten jest oznaczony kolorem seledynowym. Przerwanie INT6 lub COMPB może przerwać pętlę w INT5. Jeśli był to reset overdrive lub operacja na bicie (zapis, odczyt), program powraca do overdrive, jeśli stwierdzono standardowy sygnał reset następuje powrót do programu głównego. Jest to dość skomplikowane ale działa.
Pewną wadą takiego rozwiązania jest fakt, że program główny nie jest wykonywany podczas przejścia do trybu overdrive, ale jest to emulator i program główny ma niewiele do zrobienia. Ponadto overdrive obsługuje niewiele układów i jest on włączany na krótko.
Jak się później okazało, po optymalizacji wszystko realizuje jedno przerwanie z wstawką asemblerową. Dlaczego więc opisałem sposób z dwoma przerwaniami? Ponieważ wymagania stawiane szybkości pracy mikrokontrolera są mniejsze i możliwa jest implementacja emulacji na niższych, częstotliwościach. Kolejne przyspieszenie uzyskuje się dzięki wykorzystaniu przerzutnika D. Na jego wejście podawany jest stan bitu do wystawienia w następnej transmisji zamiast ustawiania flagi FL_SEND_ZERO. Opadające zbocze sygnału strobującego odczyt przepisuje stan wejścia D przerzutnika na jego wyjście, które za pośrednictwem bramki z otwartym kolektorem wystawia bit na magistralę. Odstępstwem emulowanego układu od protokołu jest próbkowanie stanu bitu w trybie overdrive po 3 μs a nie 1 μs od opadającego zbocza sygnału ale biorąc pod uwagę, że czas stanu niskiego bitu 0 wynosi 7,5 μs nie stanowi to problemu. Jeśli jednak zajdzie konieczność zachowania pełnej zgodności należy wykorzystać sprzętowy układ odczytujący stan bitu składający się z multiwibratora 74HC123 i przerzutnika D. Na rysunku 4 pokazano analizę działania programu przy taktowaniu 16 MHz i bez przerzutnika D.
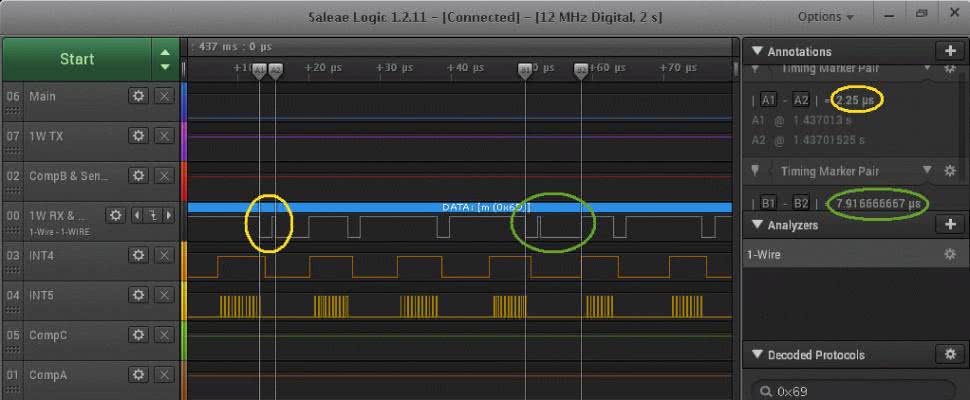
Impuls kończący się ponad 2 μs po opadającym zboczu odczytu. Dla programowych hostów nie stanowi to problemu, natomiast układy DS248x odczytują bit dużo wcześniej i wtedy pojawiają się błędy. Oczywiście przy wykorzystaniu przerzutnika D impulsu nie ma, tak jak i przy zwiększeniu częstotliwości taktującej do 22 MHz.
Budowa i działanie
Schemat urządzenia pokazano na rysunku 5.
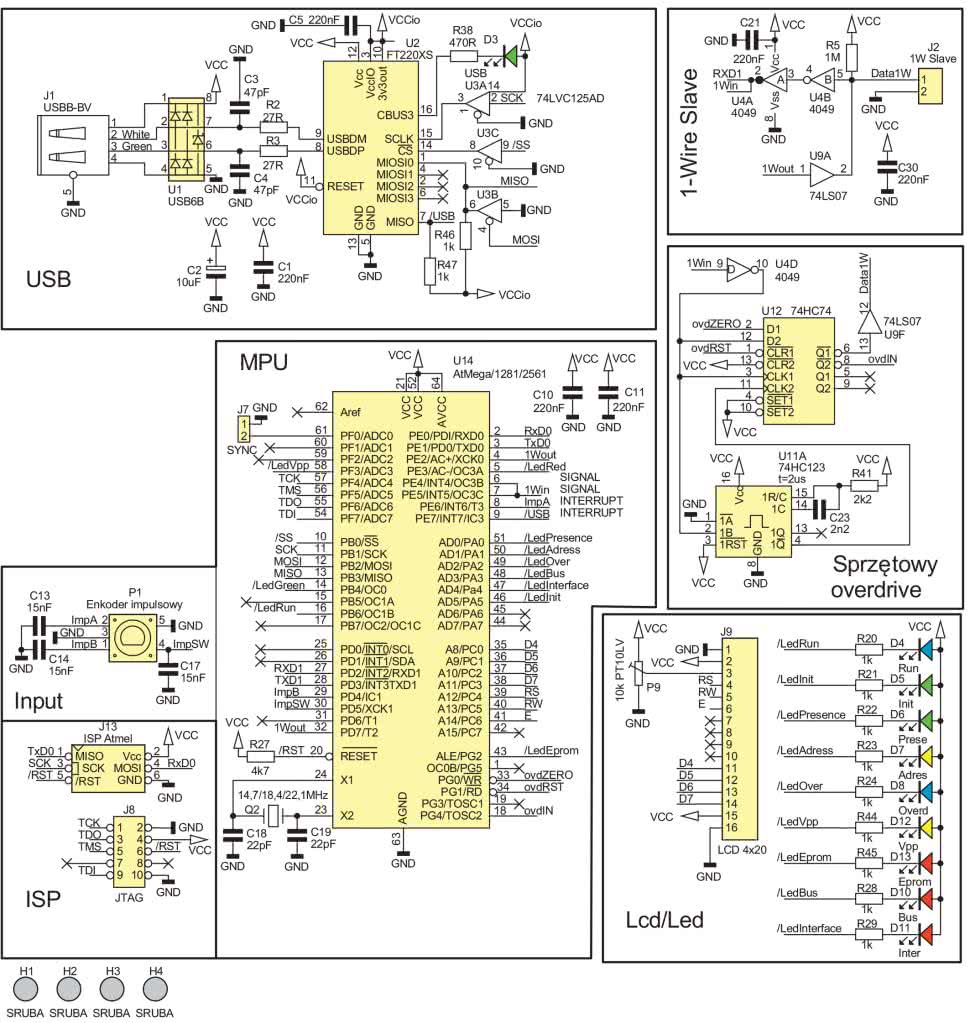
Zasilanie jest doprowadzone z portu USB. Konwerter USB-SPI akceptuje na wejściach napięcia do 3,3 V dlatego zastosowano konwerter poziomów na układzie 74LVC125. Komunikację z użytkownikiem zapewnia enkoder impulsowy i wyświetlacz LCD 4×20 znaków. Elementy te zamontowano od spodniej strony płytki dzięki czemu łatwiej urządzenie zamknąć w obudowie. Kontrast wyświetlacza można regulować potencjometrem. Elementy U11 i U12 wspomagają sprzętowo obsługę trybu overdrive. Diody led informują o stanie urządzenia (tabela 1).

Montaż i uruchomienie
Schemat płytki drukowanej wraz z rozmieszczeniem elementów pokazano na rysunku 6 i rysunku 7. Montaż jest typowy i nie wymaga omawiania.
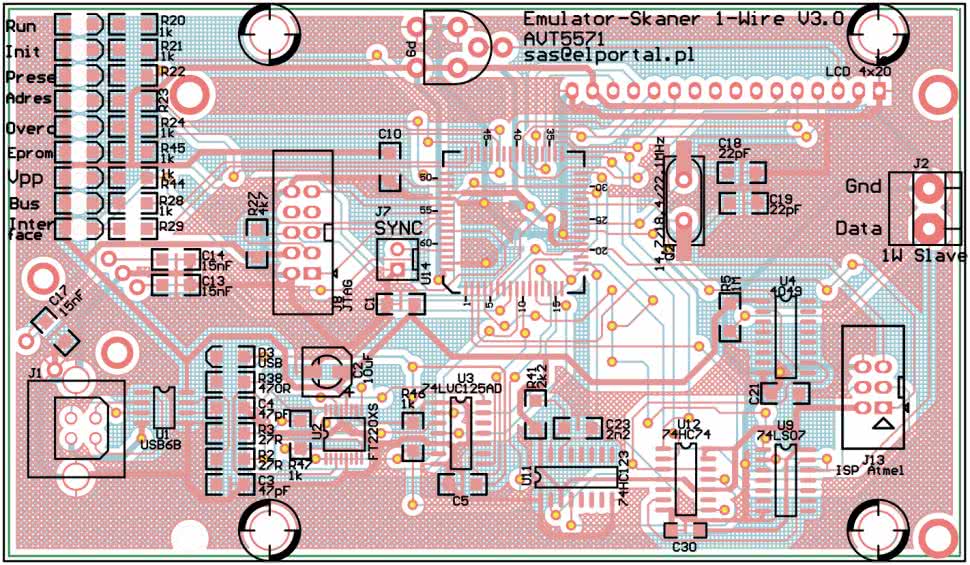
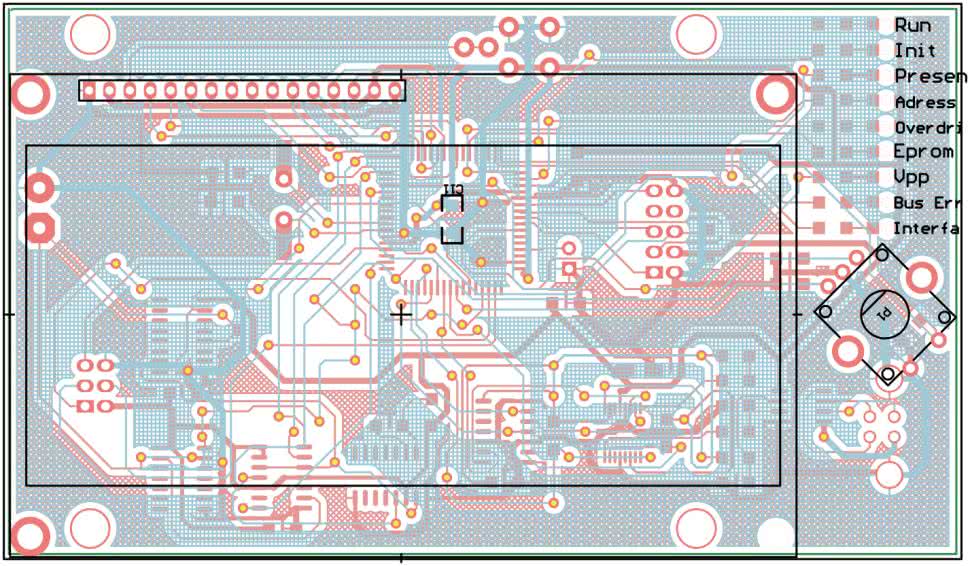
Aby ułatwić sobie pracę enkoder impulsowy i wyświetlacz należy zamontować jako ostatnie elementy (od spodniej strony płytki). Wyświetlacz z płytką warto zamontować za pomocą wtyku i gniazda goldpin, co ułatwi ewentualne naprawy. Urządzenie może pracować bez tych elementów, wtedy całe sterowanie odbywa się za pośrednictwem programu terminala. Ustawienie bitów konfiguracyjnych to: EXT=0xFD, HIGH=0x19, LOW=0xEF (rysunek 8).

Obsługa
Po ekranie startowym z informacją o trybie pracy, statusie (CPU, VID, PID) pojawi się menu główne z treścią podobną jak na rysunku 9.
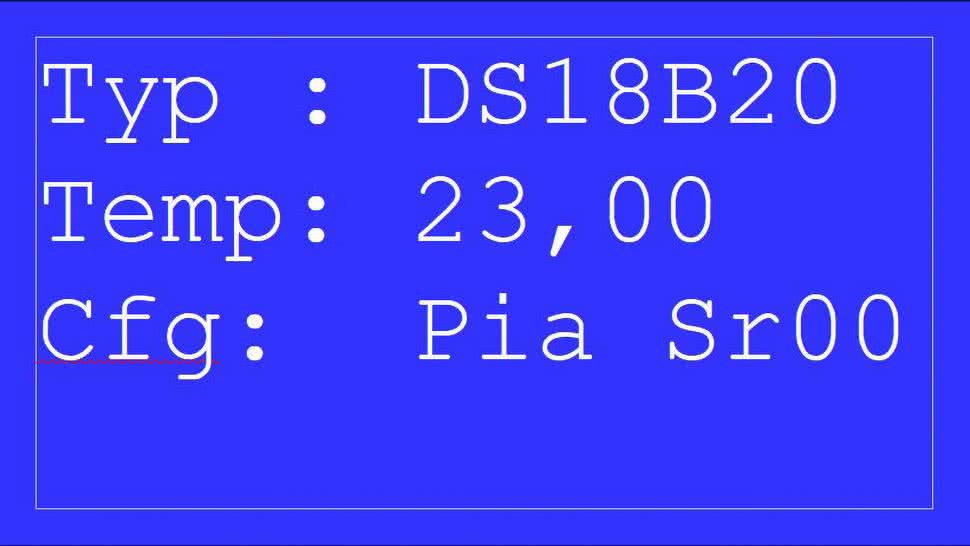
Przyciskiem enkodera zmieniamy cyklicznie typ emulowanego układu a obracając enkoder zmieniamy np emulowaną temperaturę. Znaczenie liter po CFG jest następujące:
- P – (mała/wielka litera) emulowanie zasilania pasożytniczego lub lokalnego DS18B20. Ustawianie programem terminala.
- I – (mała/wielka litera) generowanie lub nie alarmu/IRQ przez slave. Ustawianie programem terminala.
- A – (mała/wielka litera) alarm temperatury. Ustawiany automatycznie podczas emulacji termometru na podstawie rejestrów tH i tL.
- Sxyy – synchronizacja oscyloskopu, gdzie x oznacza:
- r – sygnałem reset,
- p – sygnałem presence,
- c – komendą,
- f – rodziną układu.
- yy – oznacza nr komendy lub rodziny (zależy od parametru x) układu, z którą synchronizujemy oscyloskop. Opcje ustawianie programem terminala.
Podczas emulacji/skanowania overdrive reakcje wyświetlacza nie są zbyt szybkie, jest to spowodowane dużym obciążeniem mikrokontrolera podczas operacji symulacji i szybkim transferem danych po USB w trybie skanera.
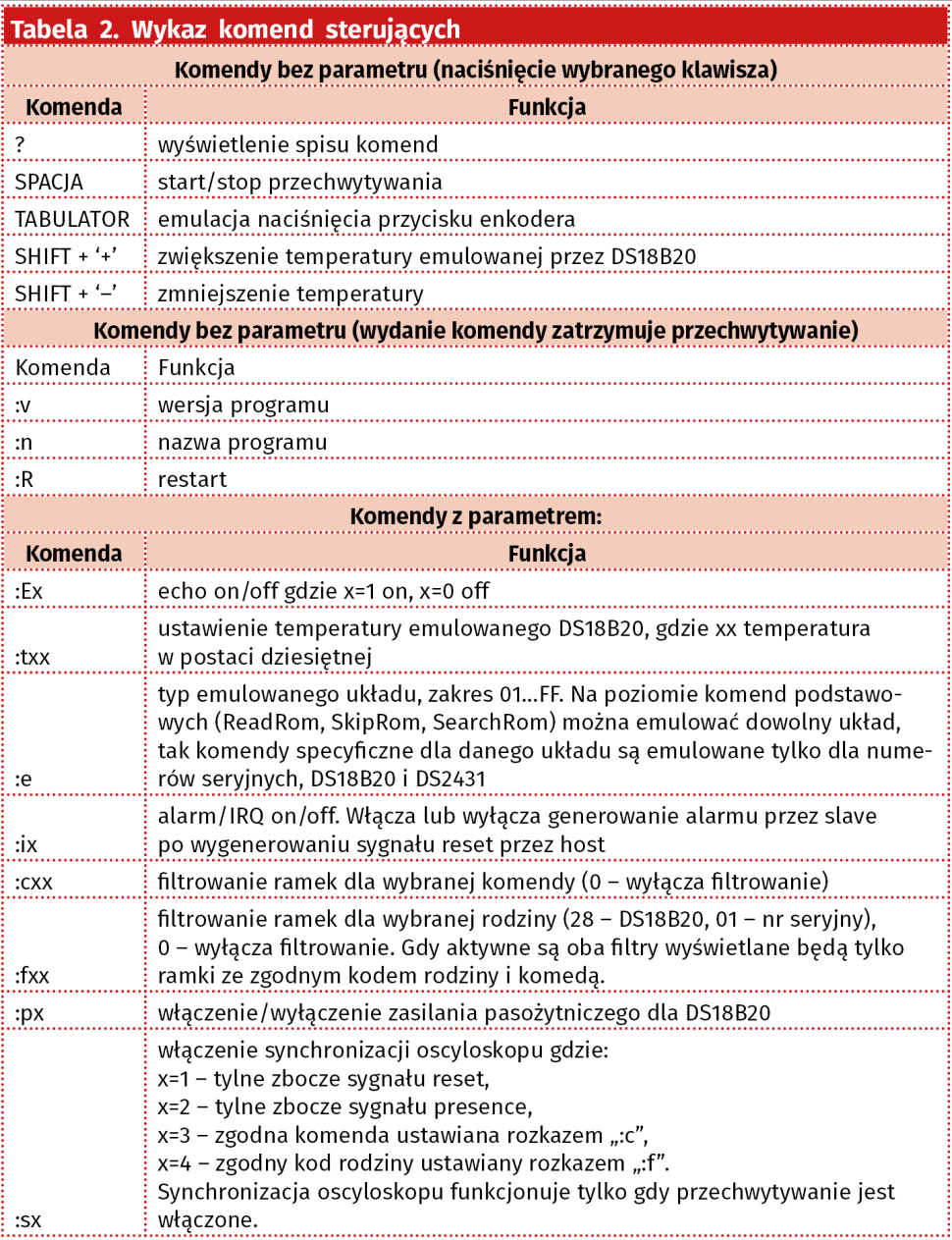
Sterowanie urządzeniem jest możliwe całkowicie poprzez program typu terminal, wykaz komend sterujących zawiera tabela 2.
Uwagi końcowe
Mikrokontroler jest nieznacznie „przetaktowany” (18,4321 MHz zamiast 16 MHz) ale nie wpływa to na pogorszenie stabilności pracy układu.
Przebadałem reakcję układów slave na przedłużony reset. Te zasilane pasożytniczo, zachowują się poprawnie, po powrocie zasilania, po resecie zaczynają pracować wystawiając presence. Wewnętrzna pojemność jest rozładowana w czasie sygnału reset, a gdy wróci zasilanie (dlatego wymagane jest po resecie przetrzymanie magistrali w stanie wysokim) w układach tych następuje wewnętrzny reset. Układy zasilane zewnętrznie (np termometr DS18B20, nr seryjny DS2411), także reagują prawidłowo. Układ DS2482, również zachowuje się poprawnie (nie wysyła danych w „kosmos”, ale w przeciwieństwie do DS2480 nie informuje o tym fakcie w statusie.
Znane mi oprogramowanie master i slave działa błędnie w takiej sytuacji. Master wysyła dane choć magistrala po zakończeniu resetu przez mastera jest jeszcze w stanie niskim i slave zakłóca transmisję innych układów. Proszę wziąć to pod uwagę w czasie pisania oprogramowania. W przypadku układów slave nigdy nie wiadomo, czy jakiś slave nie zgłosi przerwania.
Dobrą praktyką w operacjach 1-Wire jest reset magistrali po zakończeniu komunikacji z urządzeniem.
Baza emulowanych układów jest rozbudowywana. Aktualnie trwają prace nad: DS1820, DS1821, DS1920, DS1961, DS1973, DS2430, DS2432, DS2433. W sprawie nowych wersji oprogramowania proszę o kontakt.
- R1, R2: 27 Ω
- R5: 1 MΩ
- R20…R24, R28, R29, R44…R47: 1 kΩ
- R27: 4,7 kΩ
- R38: 470 Ω
- R41: 2,2 kΩ
- P9: 10 kΩ PT10LV potencjometr montażowy
- C1, C5, C10, C11, C21, C30: 220 nF
- C2: 10 μF/16 V elektrolityczny
- C3, C4: 47 pF
- C13, C14, C17: 15 nF
- C18, C19: 22 pF
- C23: 2,2 nF
- D3 (USB): dioda LED zielona SMD1206
- D4 (Run): dioda LED niebieska SMD1206
- D5 (Init): dioda LED zielona SMD1206
- D6 (Prese): dioda LED zielona SMD1206
- D7 (Adres): dioda LED żółta SMD1206
- D8 (Overd): dioda LED niebieska SMD1206
- D10 (Bus): dioda LED czerwona SMD1206
- D11 (Inter): dioda LED czerwona SMD1206
- D12 (Vpp): dioda LED żółta SMD1206
- D13 (Eprom): dioda LED czerwona SMD1206
- U1: USB6B zabezpieczenie ESD
- U2: FT220XS SSOP-16
- U3: 74LVC125AD SO-14
- U4: 4049 SO-16
- U9: 74LS07 SO-14
- U11: 74HC123 SO-16
- U12: 74HC74 SO-14
- U14: ATmega/1281/2561 PQFP64
- F1: bezpiecznik polimerowy SN010-60
- ZW1, ZW2, ZW3: zwora 0 Ω SMD1206
- Q1: rezonator kwarcowy SMD 18,4321 MHz
- P1: enkoder impulsowy, impulsator
- J1: gniazado katowe USB
- J2: złącze typu ARK2
- J9: LCD 4×20 + złącze goldpin
- J7: złącze typu HU02
- J8: złącze JTAG typu IDC10
- J13: złącze ISP Atmel typu IDC6












