 Zaloguj
Zaloguj



- pomiar temperatury w 64 punktach,
- ułożonych w matrycy 8×8,
- reprezentacja temperatury każdego punktu przy użyciu barw,
- zakres wyświetlanych temperatur 22…34°C,
- kolorowy wyświetlacz TFT o przekątnej 1,8”,
- częstotliwość odświeżania obrazu ok. 10 Hz,
- zasilanie napięciem 5…18 V.
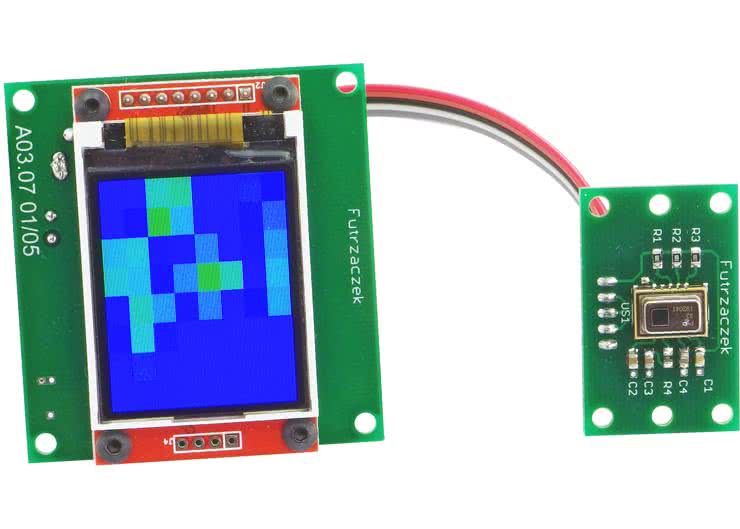
Prezentowany układ jest kompletną kamerą termowizyjną: zawiera odpowiedni czujnik, wyświetlacz oraz kontroler zarządzający. Czujnik odbiera informacje o temperaturze i dokonuje konwersji na postać cyfrową. Dane są następnie reprezentowane na wyświetlaczu w postaci różnobarwnych punktów. Kamera działa w czasie rzeczywistym, opóźnienie pomiędzy pomiarem a wyświetleniem jest stałe i pomijalnie małe.
Budowa
Podstawowym elementem składowym prezentowanego urządzenia jest czujnik typu AMG8833, produkowany przez firmę Panasonic.
| Parametr | Wartość |
| Rozdzielczość | 8×8 punktów |
| Zakres mierzonych temperatur | 0…80°C |
| Zakres temperatur pracy | 0…80°C |
| Interfejs | I2C |
| Kąt widzenia | 60° |
| Częstotliwość odświeżania | 1 lub 10 Hz |
| Możliwość sprzętowej obróbki obrazu | filtracja średnią ruchomą |
| Czas stabilizacji po włączeniu zasilania | 15 s |
| Adres na magistrali I2C | 1101000 (ADDR = GND) 1101001 (ADDR = VDD) |
| Dokładność pomiaru temperatury | ±2,5°C |
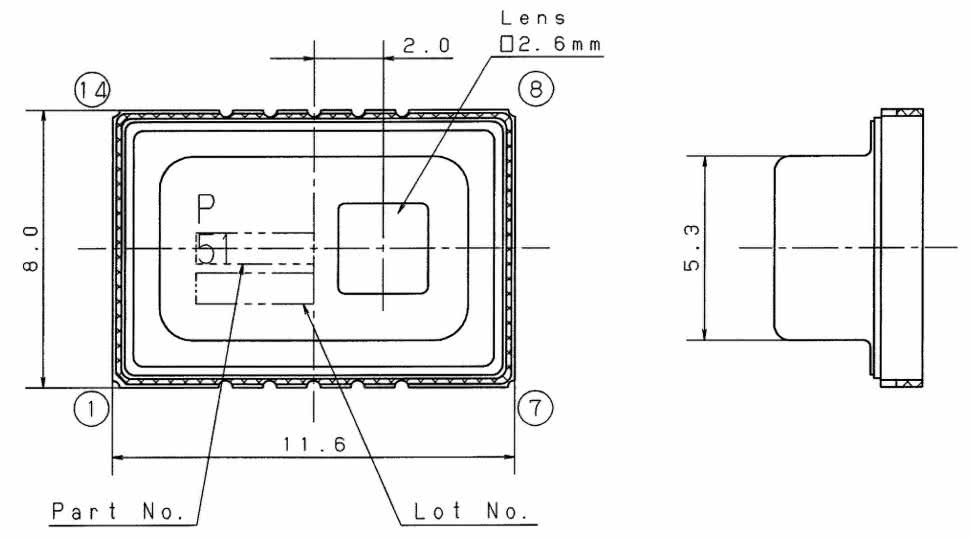
Zestawienie najważniejszych parametrów znajduje się w tabeli 1, zaś rysunek obudowy samego czujnika pokazano na rysunku 1. W niewielkiej obudowie, o wymiarach 8×11,6 mm, został zawarty kompletny system umożliwiający realizację termowizji – brakuje tylko wyświetlacza.
Pomiar temperatury odbywa się na zasadzie pirometrycznej, czyli poprzez zmierzenie natężenia promieniowania podczerwonego. Temperatura ma bezpośredni wpływ na długość emitowanej fali elektromagnetycznej oraz jej natężenie. W czujniku znajduje się światłoczuła matryca wychwytująca ten rodzaj fal. Sam czujnik również posiada pewną temperaturę, więc sam jest źródłem takiego promieniowania. Do prawidłowej pracy takiego czujnika potrzebna jest również informacja o jego własnej temperaturze, którą należy zmierzyć inną metodą. W przypadku AMG8833, odbywa się to przy użyciu termistora. Szczegóły można zobaczyć na schemacie blokowym, widocznym na rysunku 2.
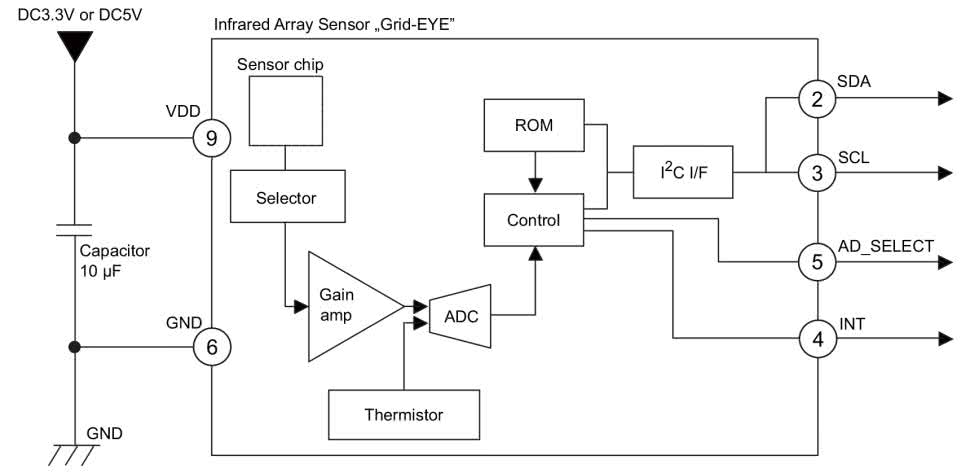
Sensor termistorowy został skalibrowany fabrycznie i ma znacznie większą rozdzielczość niż matryca, aby możliwie dokładnie kompensować wpływ temperatury otoczenia na wynik pomiaru.
Czujnik został wyposażony w interfejs I2C do komunikacji z kontrolerem. Dla większej wygody obsługi, został zamontowany na oddzielnej płytce, której schemat ideowy można zobaczyć na rysunku 3.
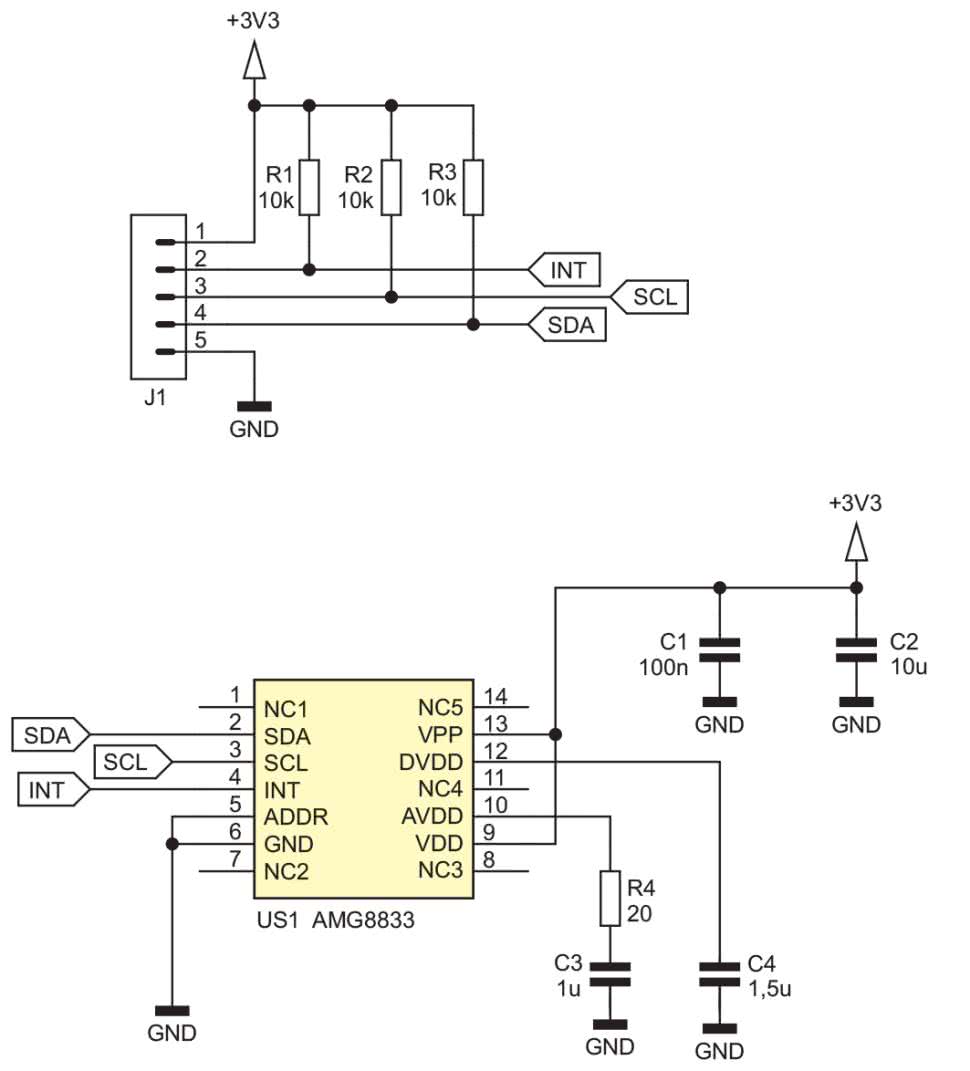
Nie zawiera wielu elementów, najważniejsze z nich są kondensatory filtrujące napięcia zasilające poszczególne obwody. Rezystory R1…R3 podciągają linie sygnałowe do dodatniego bieguna zasilania, co jest warunkiem koniecznym prawidłowej pracy magistrali I2C. Ponadto, odprowadzają z nich ładunki elektrostatyczne po wyłączeniu zasilania.
Wśród linii sygnałowych znajduje się jeszcze jedna, oznaczona jako INT. Pełni rolę przerwania, sygnalizuje kiedy któryś ze mierzonych punktów ma zbyt niską lub zbyt wysoką temperaturę, lub różnica między punktami będzie zbyt duża. W opisywanym urządzeniu ta funkcja nie jest używana, ponieważ czujnik prowadzi cykliczne pomiary i nie nadzoruje konkretnego obiektu. Stanem wyprowadzenia ADDR można ustawić 7-bitowy adres czujnika na magistrali, szczegóły zawiera tabela 1.
Bardziej rozbudowana jest płytka zawierająca wyświetlacz, której schemat ideowy pokazuje rysunek 4.
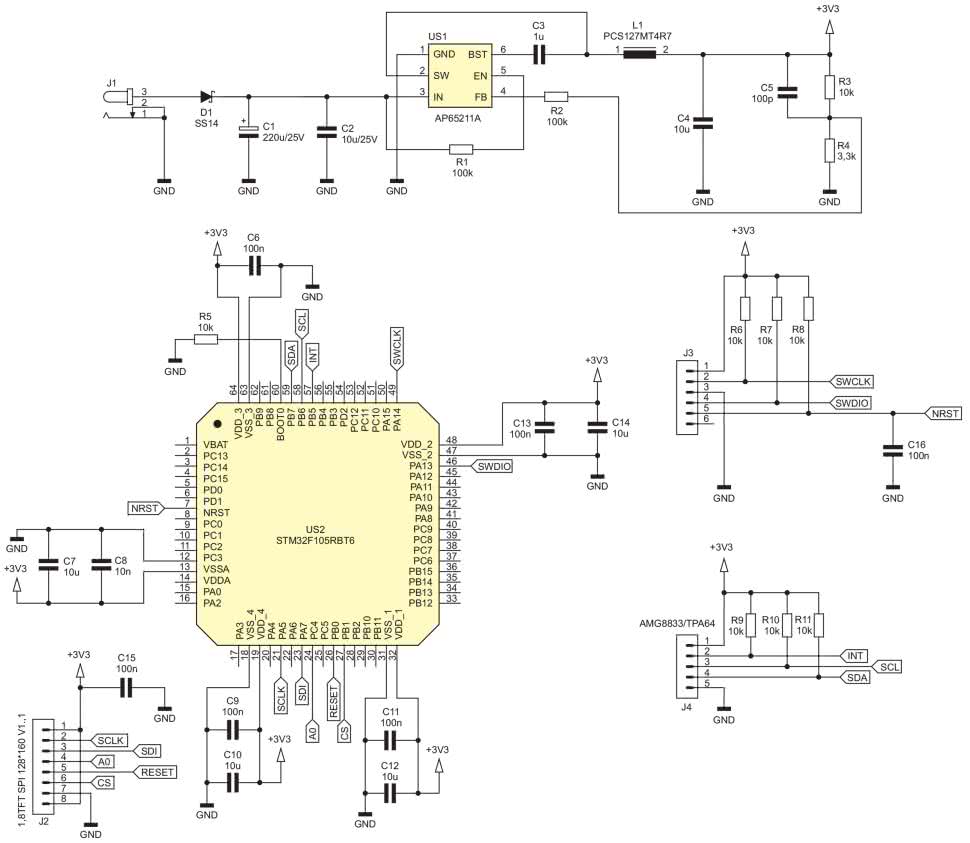
Układem zarządzającym pracą samego czujnika oraz wyświetlacza jest mikrokontroler typu STM32F105RBT6. Został wybrany z powodu pojemnej pamięci RAM, aż 64 kB, która jest niezbędna do szybkiego odświeżenia obrazu.
Zasilanie mikrokontrolera jest wyprowadzone na pięć par wyprowadzeń, z czego jedna para służy zasilaniu układów analogowych. Wszystkie muszą być odsprzęgnięte przy użyciu kondensatorów o różnych pojemnościach, dlatego w bezpośrednim otoczeniu mikrokontrolera jest ich aż 9. Warunkuje to jednak stabilną i niezawodną pracę całego systemu.
Kolorowy wyświetlacz ciekłokrystaliczny jest podłączony do złącza J2. Wyprowadzenia SCLK (zegar danych) i SDI (dane cyfrowe) są zarządzane sprzętowo, przez interfejs SPI mikrokontrolera, co umożliwia szybkie przetransferowanie nowej zawartości do pamięci RAM wyświetlacza. Pozostałe linie, czyli CS (wybór układu), A0 (dane/komenda) i RESET (zerowanie układu podrzędnego) są sterowane programowo.
Płytkę zawierającą czujnik AMG8833 podłącza się do wyprowadzeń złącza J4. Jak wspomniano wcześniej, komunikacja z nim odbywa się poprzez interfejs I2C, więc po stronie mikrokontrolera użyto dedykowanego do tego peryferium. Rezystory podciągające dublują się z tymi, które można znaleźć przy czujniku, lecz nie stanowi to problemu: przyspieszają przeładowywanie pojemności połączeń oraz również odprowadzają ładunki elektrostatyczne po odłączeniu przewodów połączeniowych. Zamiast dedykowanej płytki z czujnikiem, której schemat przedstawiono wyżej, można zastosować gotowy moduł typu TPA64 lub pokrewny. Układ wyprowadzeń modułu TPA64 jest taki sam, jak w złączu J4.
Do programowania mikrokontrolera przewidziano złącze J3, na którym wyprowadzono najważniejsze linie interfejsu SWD, przeznaczonego m.in. do programowania pamięci Flash mikrokontrolerów STM32. Są to: SWDIO, SWCLK, NRST i oczywiście GND. Wyprowadzono również napięcie zasilające mikrokontroler, gdyż niektóre programatory dokonują kontroli jego wartości. Linie sygnałowe nie są używane w czasie pracy układu, toteż zostały podciągnięte rezystorami do dodatniego bieguna zasilania.
Wszystkie użyte w układzie podzespoły wymagają zasilania napięciem stałym, dobrze stabilizowanym, o wartości 3,3 V. Do jego wytworzenia została przewidziana przetwornica obniżająca typu buck, zrealizowana przy użyciu układu AP65211A. To nowoczesny układ w niewielkiej (SOT23-6) obudowie, który pracuje z wysoką częstotliwością, rzędu 500 kHz. Jego dużą zaletą, oprócz niskiej ceny (około 1,20 zł), jest wysoka sprawność, ponieważ wewnątrz znajdują się dwa tranzystory NMOS pracujące synchronicznie. Jeden z nich jest kluczem ładującym dławik prądem ze źródła zasilania (HS), a drugi pełni funkcję diody, która otwiera się podczas jego rozładowywania (LS). Taka modyfikacja zmniejsza straty wynikające z relatywnie wysokiego spadku napięcia na przewodzącej diodzie – nawet, jeżeli jest to dioda ze złączem Schottky’ego.
Kolejnym usprawnieniem, w stosunku do dobrze znanego układu MC34063A, jest wbudowanie w strukturę układu obwodu do pomiaru natężenia prądu płynącego przez tranzystor kluczujący.
Pozostałe bloki układu AP65211A służą realizacji typowej przetwornicy o zmiennym wypełnieniu impulsów sterujących. Do poprawnej pracy wymaga kondensatora dołączonego do nóżki BST. Gromadzony ładunek służy do otwierania górnego tranzystora NMOS, w którym potencjał bramki musi być wyższy od potencjału źródła.
Montaż i uruchomienie
Układ kamery termowizyjnej został zmontowany na dwóch płytkach drukowanych. Większa, zawierająca wyświetlacz, ma wymiary 60×56,5 mm, a jej schemat ścieżek oraz schemat montażowy pokazują rysunki 5 i 6.
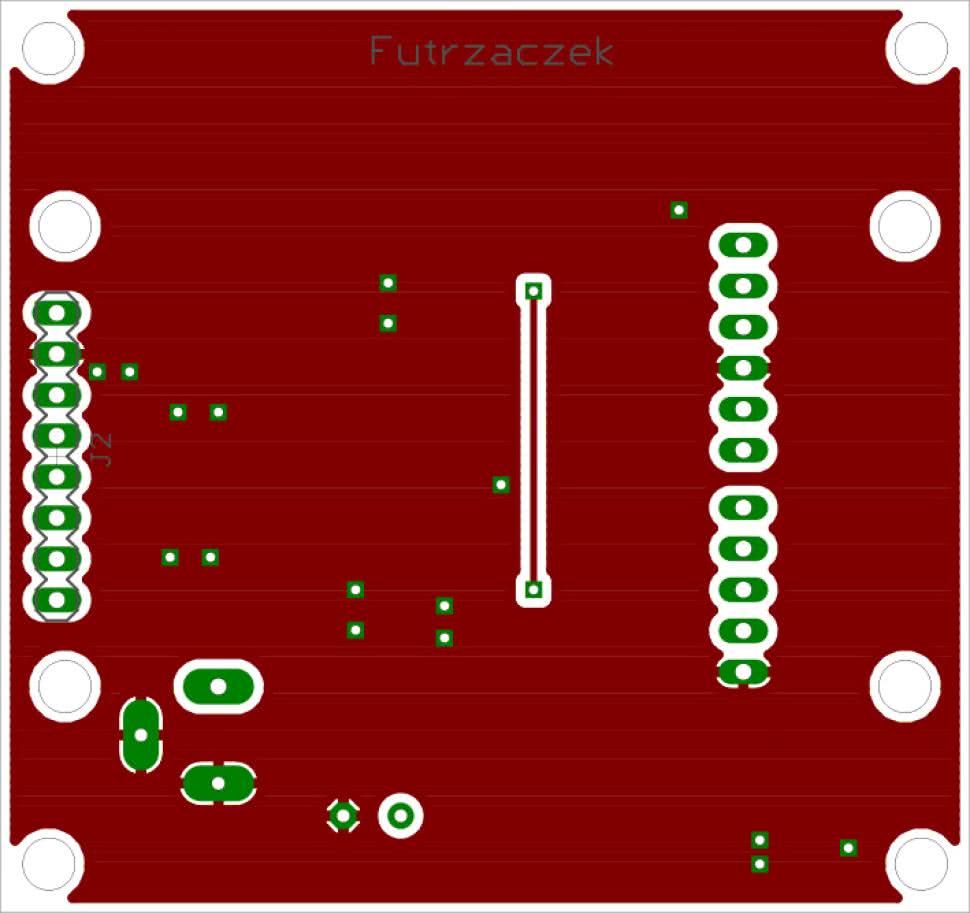
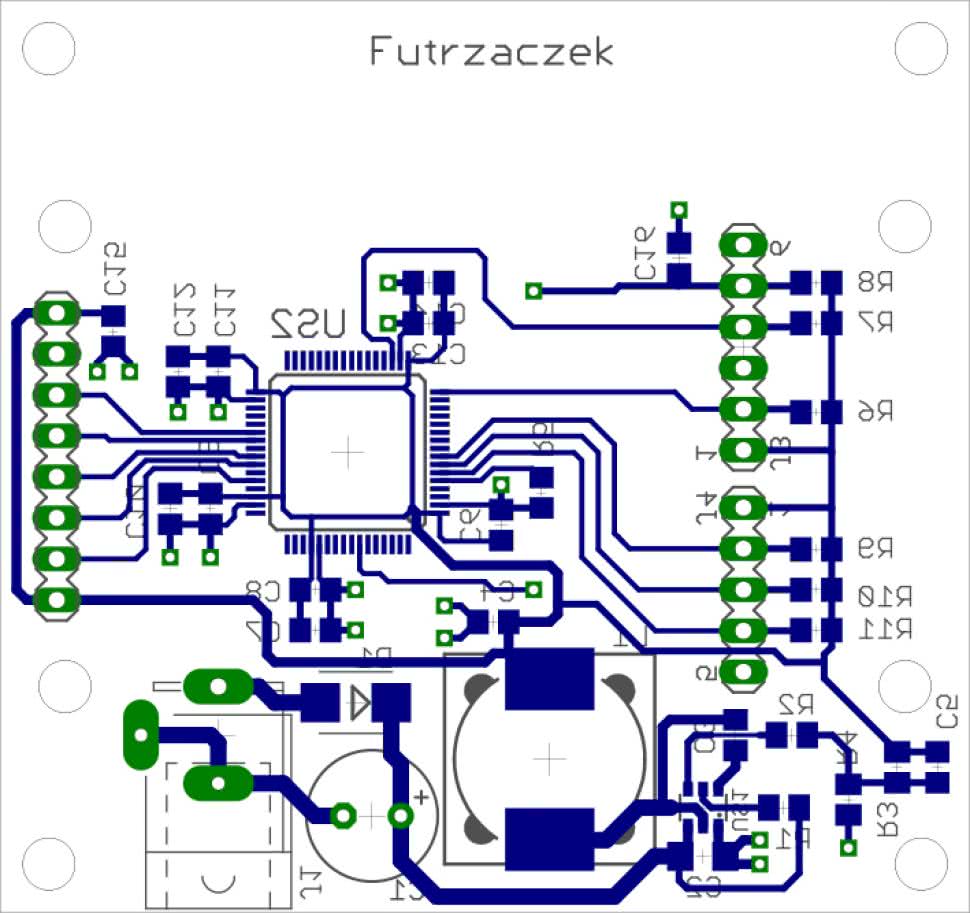
W odległości 3 mm od krawędzi płytki znalazły się otwory montażowe. Mniejsza, na której jest czujnik AMG8833 i okalające go elementy, ma wymiary 40×25 mm, a jej schemat montażowy widać na rysunkach 7 i 8.

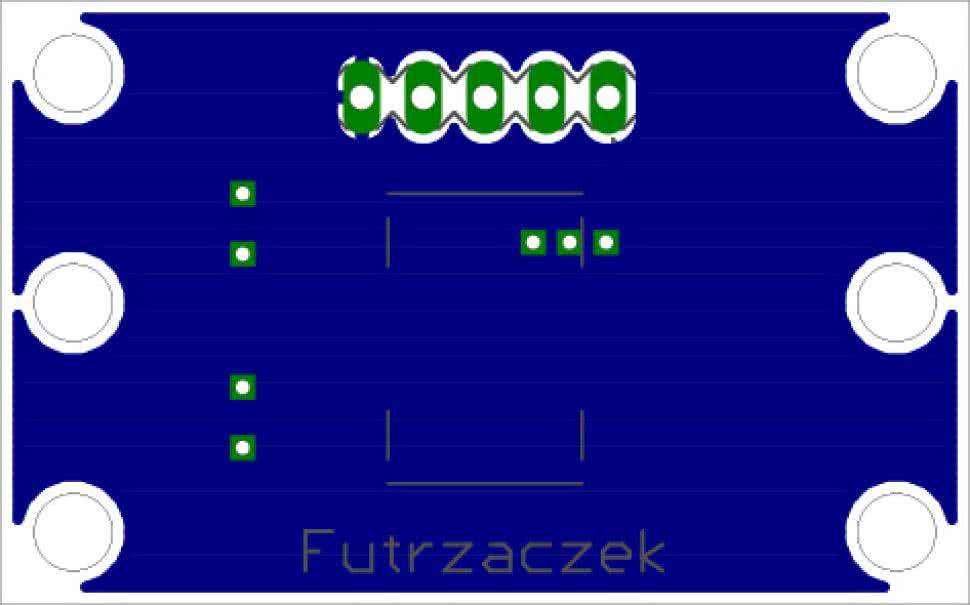
Wszystkie elementy na płytce zawierającej wyświetlacz powinny znaleźć od spodniej (Bottom) strony, przy czym wyjątkiem jest tu złącze żeńskie J2 pod sam wyświetlacz – ono, jako jedyne, powinno zostać przylutowane od strony wierzchniej (Top). Podobna sytuacja zachodzi na płytce z czujnikiem, ponieważ złącze J1 należy wlutować od tyłu, aby przewody nie przesłaniały pola widzenia czujnika.
Wyświetlacz posiada cztery otwory w rogach, którymi można przykręcić go do płytki z mikrokontrolerem. Polecam to zrobić, aby delikatne złącza typu goldpin nie zostało przypadkowo wyłamane. Najlepsze będą tuleje dystansowe M3 o długości 11 mm, gwintowane wewnątrz. Połączenie płytek należy wykonać przewodem 5-żyłowym o długości nieprzekraczającej kilkudziesięciu centymetrów. W układzie prototypowym posłużono się w tym celu przewodem taśmowym do płytek stykowych, obustronnie zakończonym wtykami żeńskimi. Zmontowany i gotowy do działania układ można zobaczyć na fotografii tytułowej oraz na fotografii 1.

Jedyną czynnością uruchomieniową, jakiej wymaga ten układ, jest zaprogramowanie pamięci Flash mikrokontrolera używając do tego specjalnie przeznaczonego złącza J3. Znajdują się na nim wyprowadzenia protokołu SWD, ułożone według kolejności opisanej w tabeli 2.
| Numer wyprowadzenia | Nazwa linii |
| 1 | VDD (zasilanie 3,3 V) |
| 2 | SWCLK |
| 3 | GND |
| 4 | SWDIO |
| 5 | NRST |
| 6 | SWO (niepodłączone) |
Należy w tym celu zasilić płytkę napięciem stałym o wartości z przedziału od 5 do 18 V, podłączając zasilacz do złącza J1. Pobór prądu zależy od napięcia zasilającego: przy 5 V jest to ok. 50 mA, zaś przy 12 V już tylko 22 mA.
Znajomość rozmieszczenia krawędzi płytki, otworów montażowych oraz najważniejszego podzespołu, jakim jest czujnik, jest niezbędna do prawidłowego zamontowania jej w obudowie. Rysunek 9 zawiera wymiarowanie płytki z czujnikiem oraz lokalizację okienka czujnika AMG8833.
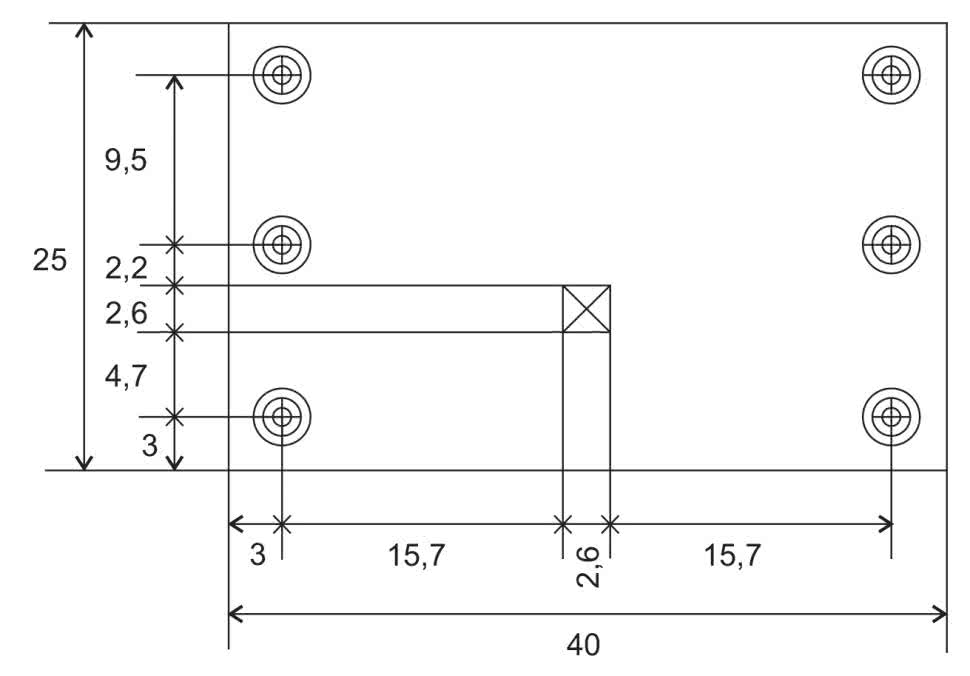
Czujnik w prawidłowym położeniu znajduje się metalowym korpusem skierowanym do góry, a okienkiem w dół. Obrócenie tej płytki spowoduje, że obraz również będzie tworzony „do góry nogami”. Na rysunku 11 zostało to uwzględnione.
Eksploatacja
Po włączeniu zasilania, następuje inicjalizacja wyświetlacza: jego zawartość stanowi najpierw kolorowy szum, potem zostaje wypełniony równomiernie czernią, a dopiero później przełącza się na wyświetlanie obrazu z czujnika. Służy to również do przetestowania prawidłowego działania wyświetlacza.
Czujnik ma kwadratowe pole widzenia, a wyświetlacz jest prostokątny (128×160 pikseli). Uznano, że zostawianie po bokach wyświetlacza czarnych pasów byłoby marnotrawstwem jego powierzchni, toteż punkty z czujnika są reprezentowane przez prostokąty o rozmiarach 16×20 pikseli. Nie stwarza to niewygody w użytkowaniu, ponieważ odstępstwo od kwadratowego kształtu jest nieznaczne.
Skala barw, którą odwzorowywana jest temperatura zarejestrowana przez czujnik, jest ułożona w powszechnie spotykany sposób: kolor niebieski to obiekty o najniższej temperaturze, następnie jest zielony, żółty, pomarańczowy, czerwony i na końcu purpurowy – dla obiektów najcieplejszych. Występują między nimi kolory pośrednie, ponieważ rozdzielczość pomiaru temperatury tym czujnikiem to 0,25°C. Z fizycznego punktu widzenia, niższą temperaturę ma obiekt emitujący światło czerwone (większa długość fali, czyli mniejsza energia fotonów), a wyższą ciało, które świeci na niebiesko (mniejsza długość fali, czyli fotony mają większą energię). Jednak przyrząd ten nie jest zdolny do rejestracji takich wartości temperatury, toteż przyjęto „ludzki” sposób pojmowania barw: czerwony – ciepły, niebieski – zimny.
Kolorem niebieskim reprezentowana jest temperatura wynosząca 22°C i mniej, a purpurowym 34°C i więcej. Dzięki takiemu zakresowi jest możliwe wykrycie ciała człowieka w pomieszczeniu o temperaturze pokojowej, jak również rozkładu temperatury powietrza wydostającego się z kwadratowego otworu wentylacyjnego w obudowie – fotografia 2.
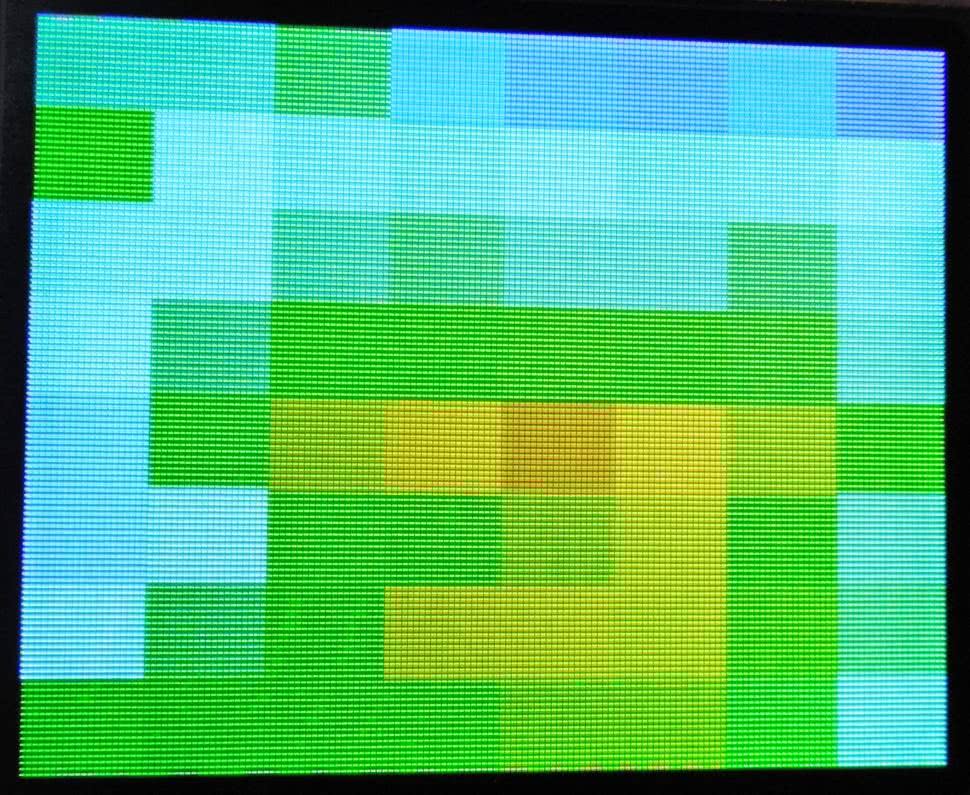
Widać na nim, że przepływ tego powietrza nie odbywa się równomiernie całym przekrojem otworu – są obszary cieplejsze (czerwony), chłodniejsze (żółte) i bardzo chłodne (żółtozielone i zielone)
Częstotliwość odświeżania obrazu przez czujnik wynosi 10 Hz, a kolejne odświeżenia zawartości wyświetlacza następują co ok. 110 ms. Na pojedynczy cykl odświeżenia składają się: pobranie z czujnika informacji o temperaturze wszystkich punktów, konwersja temperatury na kolor pikseli i wysyłanie nowej zawartości pamięci RAM do wyświetlacza.
Czujnik posiada możliwość uśredniania rejestrowanego obrazu za pomocą algorytmu średniej ruchomej. Została ona włączona, ponieważ taki rodzaj filtracji dolnoprzepustowej obrazu znacząco zmniejsza poziom jego zaszumienia.
Dla ciekawskich
Użyty wyświetlacz posiada ośmiobitowe komendy sterujące. Natomiast kolor pojedynczego piksela jest reprezentowany przez ciąg o długości 16 bitów. Można wprawdzie użyć innego trybu sterowania, gdzie jeden piksel jest sterowany przez 12 lub 18 bitów, ale byłoby to niewygodne do realizacji przy użyciu sprzętowego interfejsu SPI wbudowanego w mikrokontroler, który obsługuje dane o długości 8 lub 16 bitów.
Można posłużyć się 8-mio bitowym interfejsem SPI do wysyłki ciągów 16-to bitowych, lecz byłaby to strata cennego czasu: sprawdzanie flag zajętości bufora odbywałoby się dwukrotnie częściej. Dlatego wysyłka nowej zawartości ekranu odbywa się w dwojaki sposób. Komendy sterujące, ustalające zakres pikseli do odświeżenia i rozpoczynające zapis do pamięci RAM, wysyłane są przy użyciu 8-bitowego interfejsu SPI ze sterowaniem programowym, gdzie sprawdzanie zajętości bufora odbywa się w pętli while(), wstrzymującej działanie programu. Następnie wyłączany jest sprzętowy interfejs SPI, przełączany do pracy ze słowami o długości 16 bitów i na sterowanie poprzez DMA (Direct Memory Access). Dalej inicjowane jest samo DMA, którego zadaniem jest przesłanie 20480 wartości o długości 16 bitów. Te dane to nowa zawartość obrazu, stworzona uprzednio w pamięci RAM mikrokontrolera. Po zakończeniu wysyłki, DMA jest wyłączane, a SPI przechodzi z powrotem na sterowanie programowe ze słowami o długości 8 bitów.
Użyty mikrokontroler ma 64 kB pamięci RAM, co pozwala na tworzenie całego obrazu, mieszczącego się w odpowiednio długiej tablicy 16-to bitowych zmiennych. Raz zainicjowane DMA pobiera jedynie zawartości odpowiednich komórek pamięci i przesyła je do odpowiedniego rejestru w SPI, bez konieczności dodatkowej konwersji – daje to największą możliwą szybkość obsługi wyświetlacza. Fragmenty programu, które realizują opisane wyżej czynności, znajdują się na listingu 1.
//wygenerowany obraz
volatile uint16_t ST7735S_buffer[20480];
//struktura inicjująca DMA
DMA_InitTypeDef DMA_InitStructure;
//nadanie jednego bajtu danych z kontrolą programową
void ST7735S_spiwrite(uint16_t c) {
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET);
SPI_I2S_SendData(SPI1, c);
}
//nadanie jednego bajtu będącego komendą
void ST7735S_command(uint16_t c) {
//wyprowadzenie A0 = 0
GPIO_ResetBits(GPIOC, GPIO_Pin_4);
ST7735S_spiwrite(c);
}
//nadanie jednego bajtu będącego danymi
void ST7735S_data(uint16_t c) {
GPIO_SetBits(GPIOC, GPIO_Pin_4); //A0 = 1
ST7735S_spiwrite(c);
}
void ST7735S_init(void) {
//inicjalizacja struktury
DMA_StructInit(&DMA_InitStructure);
//adres docelowy: rejestr danych SPI1
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&SPI1->DR;
//początek danych do przeniesienia
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)&ST7735S_buffer[0];
//kierunek transmisji: z pamięci do peryferium
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST;
//liczba słów do przetransportowania
DMA_InitStructure.DMA_BufferSize = 20480;
//inkremenacja adresu odbiorczego: wyłączona
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
//inkrementacja adresu w pamięci: włączona
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
//rozmiar danych odbieranych: 16b
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
//rozmiar danych nadawanych: 16b
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
//tryb normalny: pojedyncze wyzwolenie, bez pracy ciągłej
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
//niski priorytet
DMA_InitStructure.DMA_Priority = DMA_Priority_Low;
//wyłączenie kopiowania z pamięci do pamięci
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
}
//odświeżenie zawartości ekranu
void ST7735S_display(void) {
//CS = 0, aktywacja komunikacja z wyświetlaczem
GPIO_ResetBits(GPIOB, GPIO_Pin_1);
//ustawienie zakresu przemiatania kolumn
ST7735S_command(ST7735S_CASET);
//początek: 0
ST7735S_data(0);
ST7735S_data(0);
ST7735S_data(0);
//koniec: 127
ST7735S_data(127);
ST7735S_command(ST7735S_RASET); /
/ustawienie zakresu przemiatania wierszy
//początek: 0
ST7735S_data(0);
ST7735S_data(0);
ST7735S_data(0);
//koniec: 127
ST7735S_data(159);
//uruchomienie zapisu do pamięci RAM
ST7735S_command(ST7735_RAMWR);
//A0 = 1, zapis danych
GPIO_SetBits(GPIOC, GPIO_Pin_4);
//wyłączenie SPI
SPI_Cmd(SPI1, DISABLE);
//przestawienie SPI na słowa 16-to bitowe
SPI_DataSizeConfig(SPI1, SPI_DataSize_16b);
//załączenie SPI
SPI_Cmd(SPI1, ENABLE);
//wyczyszczenie flagi zakończenia transmisji w kanale 3
DMA_ClearFlag(DMA1_FLAG_TC3);
//wyzerowanie ustawień kanału 3 w DMA
DMA_DeInit(DMA1_Channel3);
//wczytanie ustawień kanału 3 DMA
DMA_Init(DMA1_Channel3, &DMA_InitStructure);
//dołączenie SPI do DMA
SPI_I2S_DMACmd(SPI1, SPI_I2S_DMAReq_Tx, ENABLE);
//uruchomienie kanału 3 w DMA - rozpoczęcie transmisji
DMA_Cmd(DMA1_Channel3, ENABLE);
//oczekiwanie na koniec transmisji
while(DMA_GetFlagStatus(DMA1_FLAG_TC3) == RESET);
//wyłączenie kanału 3 DMA po zakończeniu transmisji
DMA_Cmd(DMA1_Channel3, DISABLE);
//odłączenie SPI od DMA
SPI_I2S_DMACmd(SPI1, SPI_I2S_DMAReq_Tx, DISABLE);
//wyłączenie SPI
SPI_Cmd(SPI1, DISABLE);
//przestawienie SPI na słowa 8-mio bitowe
SPI_DataSizeConfig(SPI1, SPI_DataSize_8b);
//załączenie SPI
SPI_Cmd(SPI1, ENABLE);
//CS = 1, wyłączenie komunikacji z wyświetlaczem
GPIO_SetBits(GPIOB, GPIO_Pin_1);
}
Został napisany w języku C, z użyciem SPL.
Michał Kurzela, EP
- R1, R2: 100 kΩ SMD0805
- R3, R5…R11: 10 kΩ SMD0805
- R4: 3,3 kΩ SMD0805
- C1: 220 μF/25 V THT raster 3,5 mm
- C2: 10 μF/25 V SMD1206
- C3: 1 μF/25 V SMD0805
- C4, C7, C10, C12, C14: 10 μF/10 V SMD0805
- C5: 100 pF SMD0805
- C6, C9, C11, C13, C15, C16: 100 nF SMD0805
- C8: 10 nF SMD0805
- D1: SS14
- US1: AP65211A SOT23-6
- US2: STM32F105RBT6 TQFP 64
- J1: gniazdo 2,1/5,5 mm do druku THT
- J2: goldpin 8 pin żeński THT 2,54 mm
- J3: goldpin 6 pin męski THT 2,54 mm
- J4: goldpin 5 pin męski THT 2,54 mm
- L1: PCS127MT4R7
- wyświetlacz LCD 1,8 TFT SPI 128×160 V1.1
- 4 tuleje dystansowe M3 11 mm (opis w tekście)
- 8 śrub M3 5 mm (opis w tekście)
- R1…R3: 10 kΩ SMD0805
- R4: 20 Ω SMD0805
- C1: 100 nF SMD0805
- C2: 10 μF/10 V SMD0805
- C3: 1 μF/25 V SMD0805
- C4: 1,5 μF/25 V SMD0805
- US1: AMG8833
- J1: goldpin 5pin męski THT 2,54 mm
- Przewód połączeniowy 5 żył (opis w tekście)












