 Zaloguj
Zaloguj




- regulacja fazowa mocy odbiorników zasilanych napięciem przemiennym,
- praca przy napięciu zasilania 12…24 V AC,
- przystosowany do częstotliwości 50 Hz,
- czytelny wyświetlacz LED wskazujący przesunięcie czasowe w załączaniu triaka (w procentach),
- regulacja przy użyciu potencjometru liniowego,
- brak izolacji galwanicznej obwodu wykonawczego od masy układu,
- pobór prądu: 35…50 mA (przy zasilaniu 12 V).
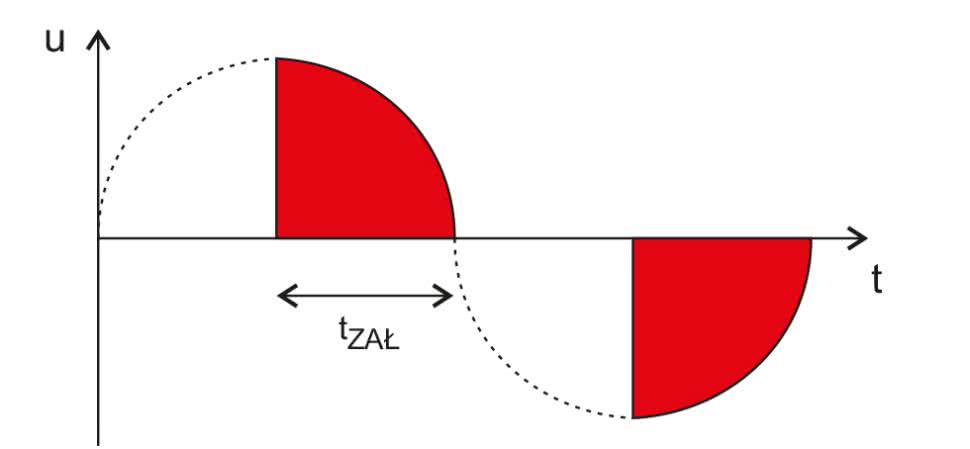
Regulacja mocy urządzeń zasilanych napięciem sinusoidalnie zmiennym o niskiej wartości skutecznej nie należy do zadań trywialnych. Najprostszym podejściem do rozwiązania tego problemu jest sterowanie fazowe, którego idea sprowadza się do opóźnienia załączenia obciążenia po odpowiednim czasie od przejścia napięcia przez zero. Im większy czas tego opóźnienia, tym mniejsza będzie moc wydzielona, ponieważ całka z pozostałej części sinusoidy będzie miała mniejszą wartość. Intuicyjnie rzecz ujmując, chodzi o zasilanie sterowanego układu wykonawczego „kawałkami” sinusoidy: im mniejszy kawałek (krótszy czas załączenia tZAŁ), tym mniejsza będzie moc – co obrazuje rysunek 1.
Takiej funkcjonalności nie można zrealizować w postaci kilkuelementowego „ściemniacza żarówek”, który wykorzystuje opóźnienie wprowadzane przez kondensator ładujący się za pośrednictwem rezystora o zmiennej wartości. Kluczowym elementem w takim układzie jest diak, który zaczyna przewodzić po naładowaniu kondensatora do określonej wartości napięcia. Produkowane obecne diaki (typu DB3 i DB4 oraz pokrewne) mają napięcia zapłonu rzędu 30 V, przez co zupełnie nie nadają się do aplikacji niskonapięciowych. Opóźnienie załączania triaka trzeba więc zrealizować w inny sposób.
Opisany układ umożliwia realizację takiego sterowania, dając użytkownikowi jeszcze jedną możliwość, której nie mają bardzo proste „ściemniacze”. Został wyposażony w wyświetlacz wskazujący procentową wartość czasu trwania załączenia triaka. Im mniejszą wartość wskazuje, tym krócej przewodzi triak, więc i mniejsza jest dostarczana do obciążenia moc.
Budowa i działanie
Schemat ideowy układu znajduje się na rysunku 2, można w nim wyodrębnić kilka istotnych bloków. Napięcie przemienne, którym ma być zasilane obciążenie oraz układ, dołącza się do zacisków złącza J1. Jest prostowane jednopołówkowo w celu zachowania połączenia jednego z doprowadzeń z masą układu. Kondensator C1 posiada znaczną pojemność po to, aby spadek napięcia na jego zaciskach pomiędzy kolejnymi impulsami doładowującymi go nie był znaczący.
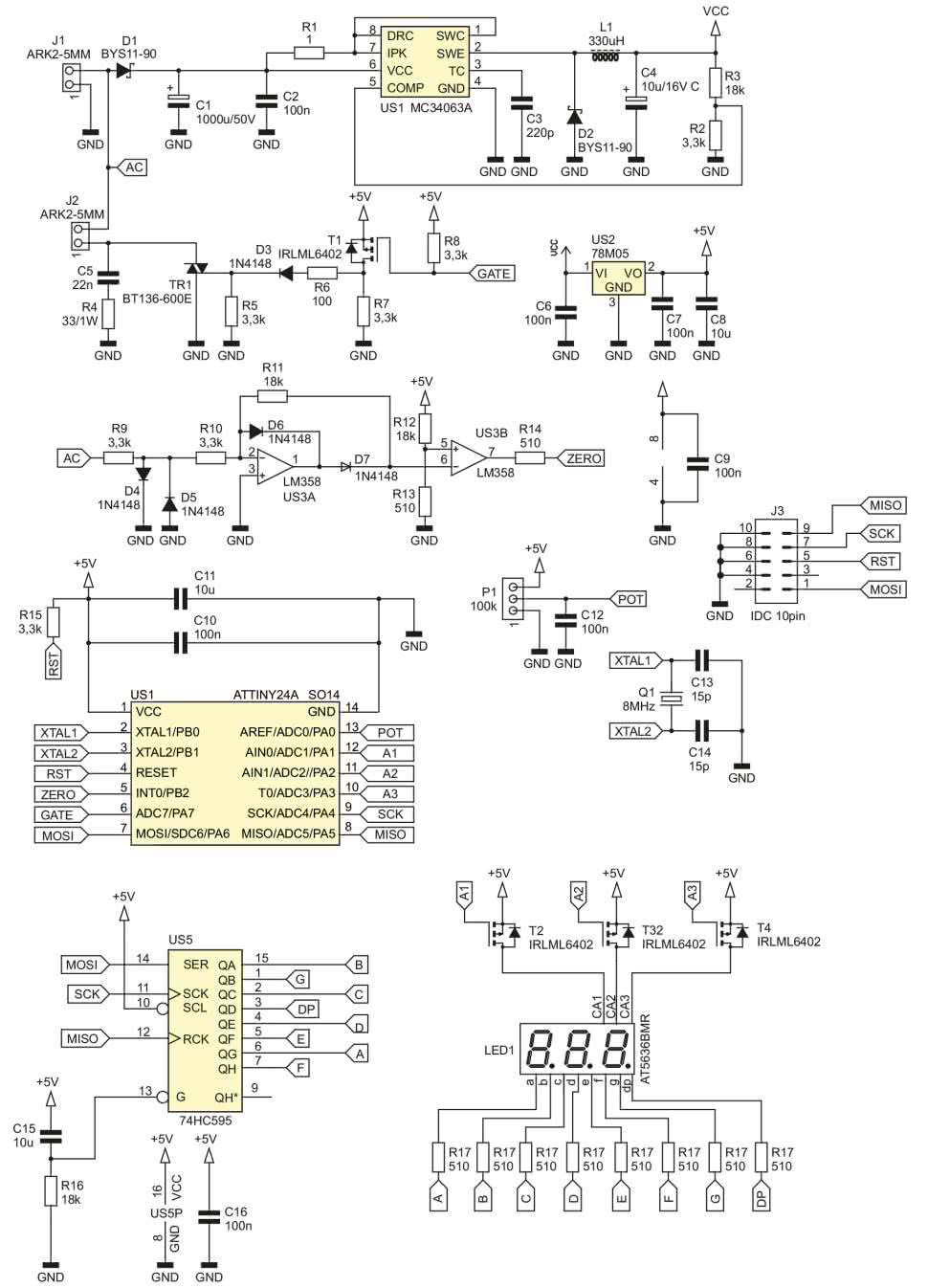
Silnie tętniące, ale już wyprostowane napięcie, trafia na wejście przetwornicy obniżającej, która została wykonana na tanim i popularnym układzie MC34063A. Napięcie wyjściowe ustalają rezystory R2 i R3 na wartość około 8 V, co pozwala na prawidłową pracę zarówno przy zasilaniu napięciem przemiennym 12 V, jak i 24 V. W układzie znajduje się również liniowy stabilizator napięcia dodatniego, typu 78M05, który dostarcza napięcie 5 V dla części sterującej.
Triak TR1 załącza obciążenie połączone do zacisków złącza J2. Jego załączenie w tym układzie odbywa się poprzez podanie dodatniego potencjału na bramkę, względem anody A1. Rezystor R6 ogranicza wartość tego prądu, a rezystor R3 zapobiega samorzutnemu załączaniu się triaka. Między anodami triaka został umieszczony prosty układ R4, C5, który pochłania energię przepięć, mogących powstać podczas przełączania obciążeń o charakterze indukcyjnym. Dioda D3 umożliwia przepływ prądu tylko w jedną stronę: od drenu tranzystora T1 w stronę bramki. Rezystor R7 zapewnia drogę dla prądu drenu T1, a R8 utrzymuje go w stanie wyłączenia. Dzięki temu, krótkotrwałe obniżenie potencjału bramki tranzystora T1 powoduje szybkie i pewne załączenie triaka, ponieważ prąd wpływający do jego bramki wynosi ok. 35 mA.
Prąd jest „wlewany” do bramki triaka niezależnie od kierunku przepływu prądu między jego anodami. Oznacza to pracę w kwadrancie pierwszym (potencjał A2 ujemny, G dodatki) i czwartym (potencjał A2 dodatni, G dodatni). O ile pierwszy kwadrant jest „naturalnym” obszarem pracy triaka, o tyle nie każdy umożliwia pewne załączenie w czwartym kwadrancie – elementy tego typu są przez producentów oznaczane jako „4Q”. Użyty w prototypie BT136-600G zalicza się do tej grupy.
Napięcie zasilające o wartości 8 V jest potrzebne do prawidłowej pracy detektora przejścia napięcia przez zero, który jest wykonany w oparciu o podwójny wzmacniacz operacyjny typu LM358 (US3). Napięcie przemienne jest najpierw ograniczane do amplitudy około 0,7 V, co odbywa się przy użyciu prostego, dwudiodowego układu limitera. Wzmacniacz US3A pracuje jako idealny prostownik dwupołówkowy, z jednym zastrzeżeniem: dolna i górna połówka sygnału wejściowego nie przechodzi przez układ jednakowo. Połówka ujemna jest odwracana i wzmacniana około 5,5-krotnie, czyli jej wartość szczytowa wyniesie ok. 3,9 V. Natomiast dolna połówka przechodzi bez wzmacniania, gdyż diody D6 i D7 blokują wtedy pracę wzmacniacza.
Wykrywanie minimów uzyskanego sygnału unipolarnego oznacza odnajdywanie punktów przejścia przez zero. Najprostszą metodą jest porównywanie wartości chwilowej sygnału z jakimś ustalonym potencjałem. Tę właśnie opcję wykonuje wzmacniacz US3B, pracujący w otwartej pętli sprzężenia zwrotnego – działa więc jak komparator.
Potencjał odniesienia ustalają rezystory R12 i R13 na wartość ok. 140 mΩ. Wyjście komparatora steruje wejściem mikrokontrolera. Ponieważ układ US3 jest zasilany napięciem wyższym niż 5 V, prąd płynący przez wejście mikrokontrolera został ograniczony rezystorem R14.
W roli mikrokontrolera zastosowano układ Attiny24A, którego niewielka pamięć jest w zupełności wystarczająca do realizacji tego zadania. Częstotliwość sygnału zegarowego została ustabilizowana poprzez zastosowanie zewnętrznego rezonatora kwarcowego o częstotliwości 8 MHz. Było to konieczne, ponieważ układ wykonuje operację krytyczną czasowo: załączanie triaka w ściśle określonym momencie. Do komunikacji programatora z mikrokontrolerem zostało przewidziane złącze J3, na które wyprowadzono sygnały niezbędne dla ISP (In System Programming), w standardzie KANDA.
Zadawanie wymaganego opóźnienia załączenia bramki triaka odbywa się poprzez obracanie osi potencjometru P1. Został włączony jako dzielnik napięcia zasilającego mikrokontroler, które jest również potencjałem odniesienia dla wbudowanego przetwornika analogowo-cyfrowego. Zatem wynik konwersji jest zawsze wprost proporcjonalny do aktualnego kąta obrotu osi. Kondensator C12 ogranicza pasmo dla szumów i zakłóceń, zaburzających pracę przetwornika.
Do wyświetlania nastawionej wartości opóźnienia służy prosty, trzycyfrowy wyświetlacz LED. Z uwagi na ograniczoną liczbę wyprowadzeń układu ATtiny24A, jego sterowanie musi odbywać się w trybie multipleksowym. Poszczególne segmenty są załączane przez rejestr przesuwny typu 74HC595. Jego wejście aktywujące jest sterowane przez układ R16, C15, którego zadaniem jest krótkotrwałe utrzymanie wszystkich ośmiu wyjść rejestru w stanie wysokiej impedancji przez krótką chwilę od włączenia zasilania. Zapobiega to nieestetycznemu „mignięciu” niektórych segmentów do momentu rozpoczęcia wykonywania programu przez mikrokontroler, zanim zostanie ustalona zawartość tego rejestru. Prądy poszczególnych segmentów wynoszą ok. 6 mA, więc prąd całej cyfry może wynieść nawet 48 mA. Dlatego cyfry są załączane za pośrednictwem dodatkowych tranzystorów MOSFET, na których spadek napięcia w stanie przewodzenia jest minimalny.
Montaż i uruchomienie
Układ został zmontowany na dwustronnej płytce drukowanej o wymiarach 65×70 mm, której wzór ścieżek oraz schemat montażowy pokazuje rysunek 3. W odległości 3 mm od krawędzi płytki znalazły się otwory montażowe.

Montaż najlepiej rozpocząć od przylutowania wszystkich elementów powierzchniowych, ponieważ znajdują się po jednej stronie płytki. Następnie warto przejść do elementów w obudowach do montażu przewlekanego, które również znajdują się po spodniej (BOTTOM) stronie płytki, czyli R2, Q1, C5, J1, J2, L1, J3, skończywszy na kondensatorze C1. Na samym końcu należy wlutować wyświetlacz LED1, który, jako jedyny, musi być umieszczony na wierzchniej stronie płytki (TOP).
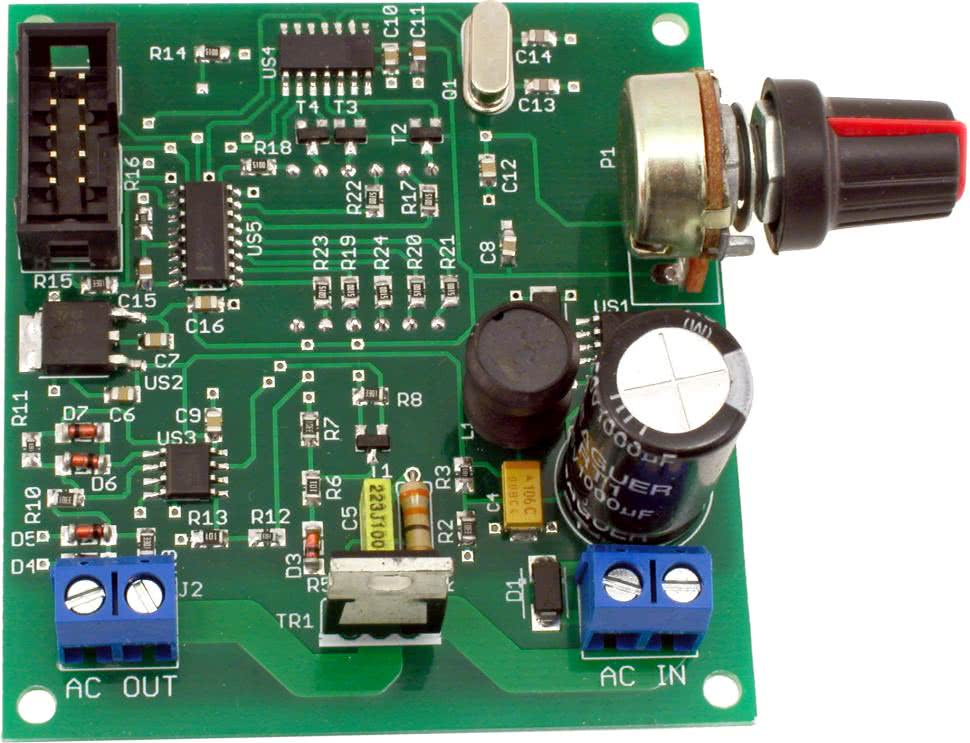
Potencjometr P1 można wlutować po dowolnej stronie płytki lub wyprowadzić go na niezbyt długich przewodach w dogodne miejsce na obudowie urządzenia. Zmontowany układ prototypowy pokazuje fotografia 1 – potencjometr został wlutowany po spodniej stronie płytki, aby konstrukcja była bardziej zwarta.
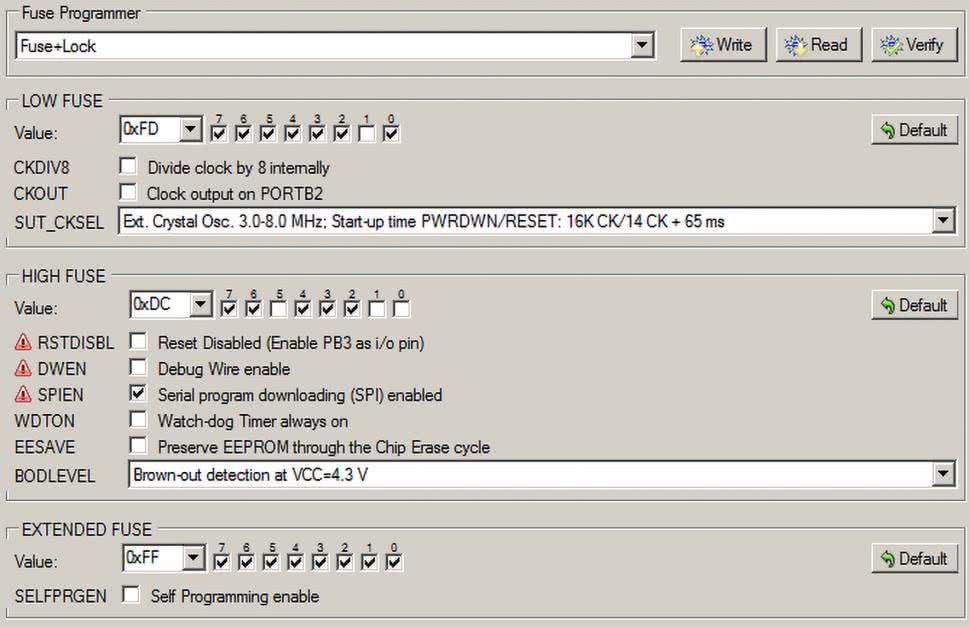
Zmontowany układ należy zaprogramować używając gotowego wsadu pamięci Flash. Ustawienia bitów zabezpieczających mikrokontrolera Attiny24A należy ustawić następująco: Low Fuse = 0xFD, High Fuse = 0xDC. Szczegóły pokazuje rysunek 4, zawierający zrzut z okna programu BitBurner. Taka konfiguracja bitów zabezpieczających uruchomi generator wzbudzający zewnętrzny rezonator kwarcowy oraz ustawi próg zadziałania zabezpieczenia Brown-out na 4,3 V.
Podczas programowania układ należy zasilać, doprowadzając napięcie o odpowiedniej wartości do zacisków złącza J1. Należy przy tym pamiętać, że jeden z zacisków złącza J1 jest połączony z masą układu, a tym samym – z masą programatora. Na potrzeby samego programowania może być to również napięcie stałe, o wartości z zakresu 15…40 V. Prawidłowo zmontowany oraz zaprogramowany układ nie wymaga dalszych czynności uruchomieniowych i jest gotowy do pracy.
Zasilanie, np. transformator sieciowy należy dołączyć do zacisków J1, a obciążenie np. żarówka do zacisków J2. Maksymalny prąd obciążenia determinuje wytrzymałość prądowa triaka oraz ścieżek i złącz ARK. Triak BT136-600E może przenieść do 4 A (wartość skuteczna), ścieżki ok. 8 A (przy grubości miedzi 35 μm i podniesieniu temperatury o 20°C), zaś złącza ok. 10 A. Triak można wymienić np. na BT137-600E, który wytrzyma prąd o wartości skutecznej 8 A. Istotne jest, aby posiadał tzw. czułą bramkę (sensitive gate), co ułatwi jego wyzwalanie – w przypadku tego triaka, czułość bramki wynosi 10 mA. W każdej sytuacji należy zadbać o prawidłowe chłodzenie triaka. Moc wydzielana na nim będzie tym większa, im większa będzie część okresu, przez którą przewodzi.
Eksploatacja
Układ prototypowy został przetestowany przy zasilaniu napięciem o wartości ok. 12 V wartości skutecznej i pod obciążeniem rezystancyjnym. Przy użyciu oscyloskopu zostały wykreślone (przy tej samej podstawie czasu i czułości toru Y) przebiegi napięcia na zaciskach obciążenia przy ustawieniu 50% (rysunek 5) i 99,9% (rysunek 6) czasu trwania triaka w stanie przewodzenia.
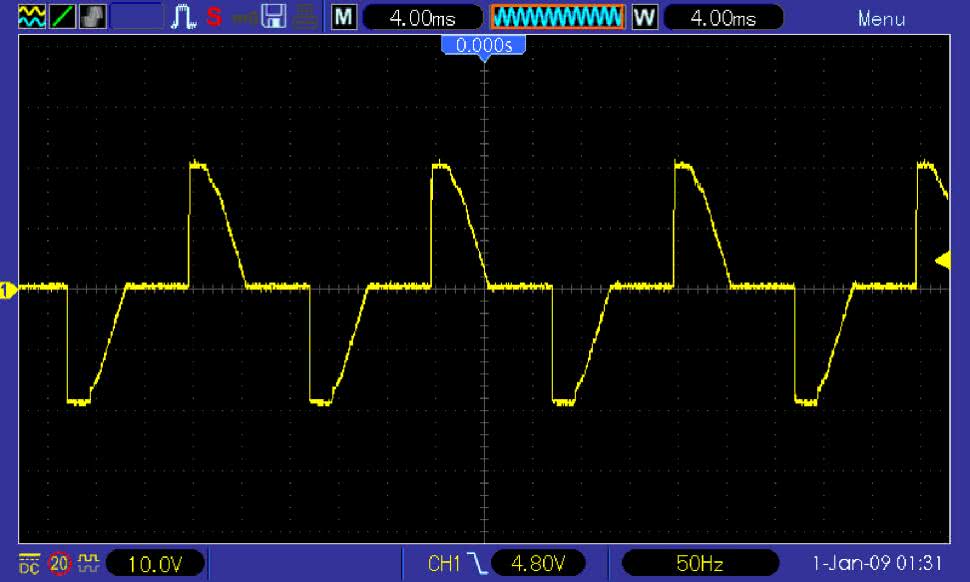
Można na nich zobaczyć, zwłaszcza na rysunku 6, zniekształcenie przebiegu napięcia, które przypomina zniekształcenie skrośne znane ze wzmacniaczy klasy B. Ta chwilowa „nieczułość” triaka jest spowodowana dwiema przyczynami.
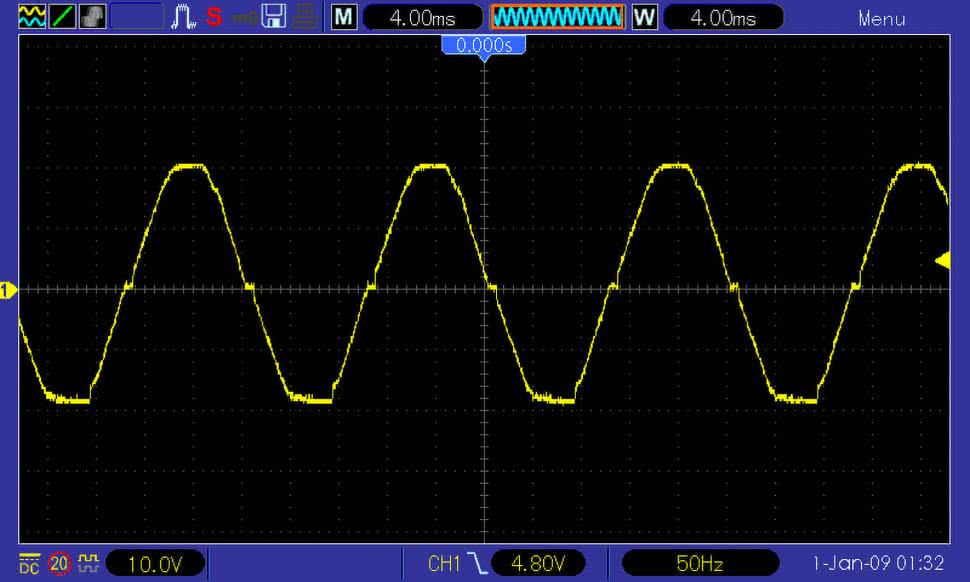
Pierwszą z nich jest niewielki margines, jaki układ pozostawia między wykryciem przejścia napięcia przez zero a załączeniem bramki triaka. Ten margines służy zapobieżeniu przypadkowemu wyzwalaniu triaka w sytuacji, gdy nie uległ on jeszcze całkowitemu wyłączeniu po poprzednim półokresie. Analogiczny margines został wprowadzony przy bardzo małych wartościach czasu trwania stanu załączenia, aby nie dochodziło do tzw. przeciągania stanu załączenia na następny okres.
Druga z nich jest bardziej prozaiczna: spadek napięcia na przewodzącym triaku wynosi ok. 1,4 V (napięcie przewodzenia dwóch złącz p-n). Jeżeli wartość chwilowa napięcia zasilającego nie przekroczyła tej wartości, nie dojdzie do załączenia triaka. W aplikacjach zasilanych napięciem sieciowym, gdzie wartość szczytowa przekracza 300 V, ta dolegliwość jest mało znacząca.
Dla ciekawskich
Najważniejsze fragmenty kodu programu znajdują się na listingu 1. Został napisany w języku C i skompilowany przy użyciu AVR-GCC. Impulsy oznaczające przejście napięcia sieciowego przez zero są wykrywane za pomocą przerwania INT0. W momencie wykrycia takiego impulsu, uruchamiany jest licznik TIMER1, po czym układ czeka na przepełnienie. Kiedy ono nastąpi, załączana jest bramka triaka, a do rejestru TCNT1 ładowana jest taka wartość, która zapewni przepełnienie po upływie około 4 μs. Tyle wystarczy, aby prawidłowo załączyć triak. Kiedy nastąpi kolejne przepełnienie, sygnalizujące koniec odliczania tego czasu, TIMER1 jest wyłączany, tak samo, jak bramka triaka.
//załączenie bramki triaka
#define GATE_ON PORTA&=0b01111111
//wyłączenie braki triaka
#define GATE_OFF PORTA|=0b10000000
//wartość pobrana z ADC z zakresu 0 - 1023
volatile uint16_t adc = 0;
//stan pracy układu:
volatile uint8_t state = 0;
//1 - rozpoczęcie odliczania po wykryciu przejścia przez zero
//2 - załączenie bramki po odliczeniu odpowiedniego opóźnienia
//0 - stan spoczynkowy, oczekiwanie na impuls z detektora
//wartość do załadowania dla Timer1
volatile uint32_t tim1_cnt = 0;
//---------------------------------------------------------------
// OBSŁUGA DETEKCJI ZERA
ISR(EXT_INT0_vect){
//załadowanie obliczonego wcześniej opóźnienia
TCNT1 = tim1_cnt;
TCCR1B = (1 << CS11); //preskaler przez 8
state = 1; //rozpoczęcie odliczania
}
//---------------------------------------------------------------
// OBSŁUGA BRAMKI TRIAKA
ISR(TIM1_OVF_vect){
//po zakończeniu załączenia bramki triaka
if(state == 2){
GATE_OFF; //wyłącz bramkę triaka
TCCR1B = 0; //wyłącz Timer1
state = 0; //przejście w stan spoczynku
}
//po zakończeniu odmierzania opóźnienia
if(state == 1){
GATE_ON; //załącz bramkę triaka
TCNT1 = 65531; //załąduj do odmierzenia ok. 4us
state = 2; //oczekuj na zakończenie impulsu
}
}
//---------------------------------------------------------------
// GLÓWNA FUNKCJA PROGRAMU
int main(void){
//przerwanie INT0 (od zbocza narastającego)
//do wykrywania przejścia przez zero
MCUCR = (1 << ISC01) | (1 << ISC00);
GIMSK = (1 << INT0);
//przerwanie TIM1 do generacji impulsów opóźniających
//oraz załączających bramkę triaka
TIMSK1 |= (1 << TOIE1);
sei(); //aktywacja systemu przerwań
while (1){
//wartości ustalone doświadczalnie
tim1_cnt = 55880 + (adc * 9.149);
}
}
Wyniki konwersji z ADC są uśredniane (ten fragment nie znajduje się na listingu 1) oraz przeliczane na zadaną wartość opóźnienia w pętli głównej, ponieważ nie jest to czynność krytyczna czasowo. Współczynniki do konwersji wartości pobranej z ADC na wartość opóźnienia zostały dobrane doświadczalnie.
Michał Kurzela, EP
- R1: 1 Ω SMD0805
- R2, R5, R7…R10, R15: 3,3 kΩ SMD0805
- R3, R11, R12, R16: 18 kΩ SMD0805
- R4: 33 Ω/1 W THT
- R6: 100 Ω SMD0805
- R13, R14, R17…R24: 510 Ω SMD0805
- P1: 100 kΩ jednoobrotowy THT
- C1: 1000 μF/50 V THT raster 5 mm
- C2, C6, C7, C9, C10, C12, C16: 100 nF 50 V SMD0805
- C3: 220 pF SMD0805
- C4: 10 μF 16V SMD C tantalowy
- C5: 22 nF 63 V MKT raster 5mm
- C8, C11, C15: 10 μF 16V SMD0805
- C13, C14: 15 pF SMD0805
- D1, D2: BYS11-90
- D3…D7: 1N4148 MiniMELF
- LED1: AT5636BMR
- T1…T4: IRLML6402
- TR1: BT136-600E TO220
- US1: MC34063A SO8
- US2: 78M05 DPAK
- US3: LM358 SO8
- US4: Attiny24A SO14
- US5: 74HC595 SO16
- J1, J2: ARK2/500
- J3: IDC 10 pin 2,54 mm THT proste
- L1: 330 μH pionowy
- Q1: 8 MHz THT niski












