 Zaloguj
Zaloguj




- 16 obsługiwanych kanałów MIDI,
- 8 obsługiwanych kanałów PWM,
- obsługiwane komunikaty MIDI: Note On, Note Off,
- rozdzielczość kanałów PWM: 7 bitów,
- wydajność prądowa kanałów PWM: do 10 A (zależne od zastosowanego radiatora),
- napięcie zasilania: 7,5…12 VDC, pobierany prąd 8 mA.
Zadaniem prezentowanego urządzenia MidiLights jest odtwarzanie efektów wizualnych towarzyszących nagraniu muzycznemu zapisanych na jednej ze ścieżek MIDI. Zanim jednak przejdę do opisu urządzenia, kilka słów komentarza należy się samemu interfejsowi MIDI. Interfejs ten jest szeregowym interfejsem komunikacyjnym pracującym z szybkością 31250 (±1%) bits/s, w którym dane przesyłane są w paczkach po 8 bitów, z jednym bitem startu i jednym bitem stopu, bez bitów kontroli parzystości. Układ wejściowy interfejsu MIDI wykonuje się zwykle przy użyciu szybkiego transoptora (6N138), który zamienia prąd w linii (ok. 5 mA) na przebiegi napięciowe, zaś interfejs wyjściowy z wykorzystaniem pary rezystorów ograniczających prąd diody LED w urządzeniu odbiorczym.
W standardzie MIDI dane przesyłane są grupowo w formie tzw. komunikatów (Messages), przy czym wprowadzono bardzo prosty sposób na odróżnienie bajtów poleceń sterujących (Status Byte) od bajtów danych (Data Byte): bajty poleceń mają ustawiony najstarszy bit (0xFF...0x80) a bajty danych najstarszy bit mają wyzerowany (0x7F...0x00). Zwykle informacje przesyłane są w kolejności: bajt polecenia i po nim jeden lub dwa bajty danych (w zależności od rodzaju polecenia). Polecenia wysyłane są tylko przy zmianie danego elementu sterującego. Bajt polecenia określa jedną ze standardowo zdefiniowanych funkcji, którą instrument ma wykonać (4 najstarsze bity), np. Note On/Off (włącz/wyłącz nutę), Control Change (zmień parametr urządzenia), Program Change (zmień rodzaj brzmienia) oraz numer kanału MIDI, na którym informacja ma być odebrana (pozostałe 4 bity określające jeden z 16 kanałów MIDI).
Dla porządku należy wspomnieć o możliwości ograniczenia transferu danych poprzez usunięcie redundancji, z której korzysta metoda Running Status. Polega na wysłaniu jednego bajta polecenia i wielu bajtów danych (bez każdorazowego ponawiania bajta polecenia) w przypadku przesyłania tego samego rodzaju sygnałów sterujących jeden za drugim, np. sygnały wywołane zmianą jednego i tego samego regulatora. Przy projektowaniu programu obsługi naszego urządzenia metoda ta nie została zaimplementowana.
Co ciekawe, MIDI, choć wymyślone w latach 80., jest na tyle uniwersalne, że z powodzeniem wykorzystują je najnowsze urządzenia estradowe. W praktyce prawie każde urządzenie estradowe korzysta z dobrodziejstw tego medium transmisyjnego, zaś jednym z powodów użycia technologii MIDI jest szeroka dostępność i uniwersalność takich sterowników.
Budowa
Prezentowany układ pozwala na sterowanie ośmioma kanałami LED za pomocą dowolnego sterownika MIDI (komputer z odpowiednim oprogramowaniem, klawiatura MIDI lub sprzętowy sekwenser MIDI), przy czym w każdym kanale LED możliwa jest niezależna regulacja jasności świecenia w 128 krokach regulacji. Schemat urządzenia MidiLights pokazano na rysunku rysunku 1.
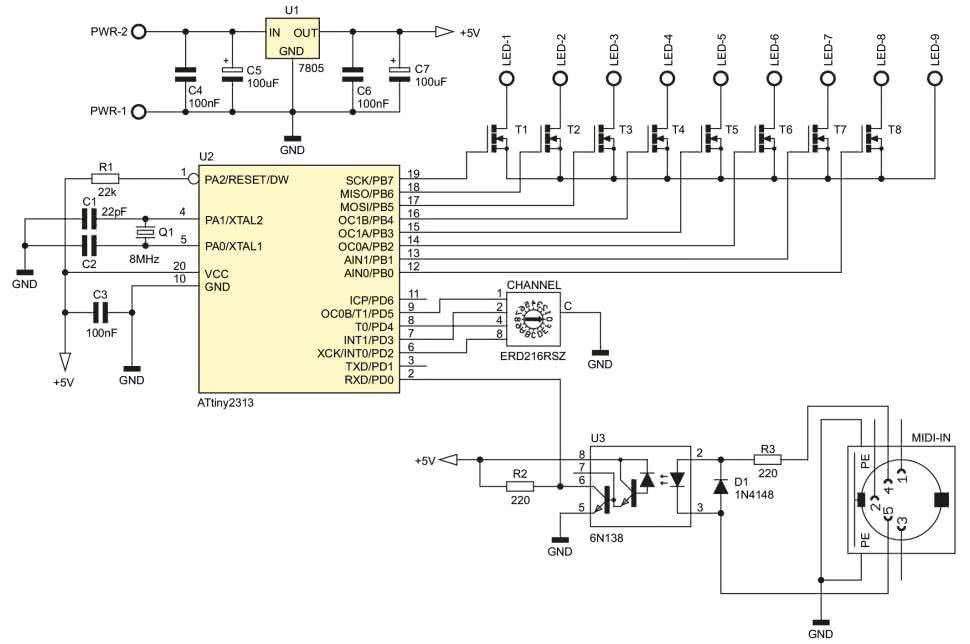
Jest to bardzo prosty system mikroprocesorowy, którego sercem jest niewielki mikrokontroler firmy Microchip (dawniej Atmel) ATtiny2313 taktowany zewnętrznym rezonatorem kwarcowym o częstotliwości 8 MHz. Zastosowanie rezonatora kwarcowego jako źródła taktowania mikrokontrolera wynikało z potrzeby zapewnienia dużej dokładności prędkości transmisji MIDI (±1%).
Mikrokontroler odpowiedzialny jest za obsługę wejściowego interfejsu MIDI (driver wejściowy z zastosowaniem transoptora 6N138) przy użyciu odpowiednio skonfigurowanego interfejsu USART mikrokontrolera oraz za programową realizację 8-kanałowego sterownika PWM (z użyciem układu licznikowego TIMER0 wbudowanego w strukturę mikrokontrolera).
Konieczność implementacji 8-kanałowego (7-bitowego) programowego sterownika PWM wynikała z niewystarczającej liczby sprzętowych kanałów PWM, jakie udostępnia zastosowany mikrokontroler. Z jednej strony implementacja takiego mechanizmu jest niezmiernie prosta, z drugiej angażuje sporo zasobów mikrokontrolera, gdyż przy deklarowanej rozdzielczości PWM równej 7 bitów (128 poziomów jasności) oraz obsługiwanych 8 kanałach stosowna funkcja obsługi przerwania licznika TIMER0 wywoływana jest 12800 razy na sekundę (co ok. 78 μs). Na szczęście, co pokażę za chwilę, funkcja ta jest niezmiernie prosta i krótka, więc mimo jej częstego wywoływania mikrokontroler dysponuje jeszcze sporą dawką wolnego czasu.
Program aplikacji realizuje jeszcze obsługę sprzętowego interfejsu USART mikrokontrolera. Funkcja obsługi przerwania od odbioru danych USART wypełnia jedynie programowy, kołowy bufor danych MIDI, którego obsługa realizowana jest w pętli głównej aplikacji. W ten sposób zapewniono efektywną obsługę wejściowego interfejsu MIDI, minimalizując właściwie możliwość pominięcia przesyłanych danych. Warto w tym momencie podkreślić, że urządzenie MidiLights obsługuje wyłącznie dwa rodzaje komunikatów MIDI, a mianowicie: Note On (0x90) i Note Off (0x80), przy czym odbierane są wyłącznie dane wysyłane na aktywnym dla urządzenia kanale MIDI, którego numer wybierany jest za pomocą zadajnika kodu oznaczonego jako CHANNEL. Ustawienia 0…9 odpowiadają kanałom MIDI 1…10, zaś A…F kanałom 11…16. Obsługiwany komunikat typu Note On lub Note Off ma następującą konstrukcję:
NoteOn/NoteOff - noteNr - noteVelocity
gdzie:
- NoteOn/NoteOff - obsługiwany komunikat MIDI,
- noteNr - numer klawisza (nuta, 0…127), przy czym obsługiwane są wyłącznie następujące wartości nut: C4, D4, E4, F4, G4, A4, B4, C5, odpowiadające kolejnym kanałom PWM (0…7),
- noteVelocity - siła nacisku klawisza (0…127), odpowiadająca wartości dla wybranego kanału PWM (0…7).
Komunikat Note On (z towarzyszącymi danymi noteNr i noteVelocity) powoduje ustawienie jasności wybranego kanału PWM, zaś komunikat Note Off (z towarzyszącymi danymi noteNr i noteVelocity) powoduje wyłączenie wybranego kanału PWM. W ten prosty sposób, używając np. klawiatury MIDI, możemy sterować jasnością i zachowaniem poszczególnych kanałów PWM, tworząc tło świetlne dla prezentowanego utworu muzycznego. Co więcej, tło takie może zostać zapisane łącznie z danymi muzycznymi (np. na nieużywanym kanale MIDI), co zapewnia nam powtarzalność tak stworzonej prezentacji.
Obsługa MIDI
Na listingu 1 pokazano funkcję przeznaczoną do inicjalizacji interfejsu USART mikrokontrolera jako sprzęgu MIDI.
Listing 1. Funkcja inicjalizacyjna interfejsu USART mikrokontrolera do obsługi MIDI
//Definicja prędkości interfejsu MIDI
#define MIDI_BAUD 31250
#define CALCULATED_UBRR F_CPU/16/MIDI_BAUD-1
//Definicje bufora odbiorczego MIDI
#define MIDI_RX_BUF_SIZE 64
#define MIDI_RX_BUF_MASK (MIDI_RX_BUF_SIZE - 1)
void MIDIinit(void) {
//Ustawienie prędkości interfejsu MIDI
UBRRH = (CALCULATED_UBRR)>>8;
UBRRL = CALCULATED_UBRR;
//Załączenie odbiornika oraz aktywacja przerwania od odbioru danych
UCSRB = (1<<RXEN)|(1<<RXCIE);
//Ustawienie formatu ramki: 8bitów danych, 1 bit stopu
UCSRC = (3<<UCSZ0);
}W celu zwiększenia przejrzystości kodu źródłowego wprowadzamy globalną zmienną strukturalną odpowiedzialną za przechowywanie danych i obsługę kołowego bufora odbiorczego MIDI. Definicję wspomnianej zmiennej pokazano na listingu 2.
Listing 2. Definicja zmiennej odpowiedzialnej za przechowywanie danych i obsługę kołowego bufora odbiorczego MIDI
volatile struct{
uint8_t Head;
uint8_t Tail;
uint8_t Bytes;
uint8_t Data[MIDI_RX_BUF_SIZE];
} midiBuffer;Prosta funkcja obsługi przerwania od odbioru danych interfejsu USART (USART_RX_vect), której zadaniem jest napełnianie kołowego bufora odbiorczego MIDI nadchodzącymi danymi, została pokazana na listingu 3.
Listing 3. Funkcja obsługi przerwania od odbioru danych interfejsu USART
ISR(USART_RX_vect) {
uint8_t newHead, Data;
Data = UDR; //Pobieramy bajt danych z bufora sprzętowego USART
//Obliczamy nowy indeks „głowy węża”
newHead = (midiBuffer.Head + 1) & MIDI_RX_BUF_MASK;
//Sprawdzamy, czy wąż nie zacznie zjadać własnego ogona
if (newHead == midiBuffer.Tail) {
//Przepełnienie bufora - można obsłużyć ten błąd
} else {
midiBuffer.Head = newHead; //Zapamiętujemy nowy indeks „głowy węża”
midiBuffer.Data[newHead] = Data; //Wpisujemy odebrany bajt do bufora FIFO
++midiBuffer.Bytes;
}
}Niezbędna jest prosta funkcja narzędziowa, dzięki której pobierzemy dane z tego bufora - kod pokazano na listingu listingu 4.
Listing 4. Funkcja pobierająca dane z kołowego bufora MIDI
uint8_t MIDIgetByte(void){
uint8_t Byte;
ATOMIC_BLOCK(ATOMIC_RESTORESTATE) {
//Obliczamy i zapamiętujemy nowy indeks „ogona węża” bufora MIDI
midiBuffer.Tail = (midiBuffer.Tail + 1) & MIDI_RX_BUF_MASK;
//Zwracamy bajt pobrany z bufora jako rezultat wykonania funkcji
Byte = midiBuffer.Data[midiBuffer.Tail];
--midiBuffer.Bytes;
}
return Byte;
}Na koniec funkcja narzędziowa, dzięki której w bardzo prosty sposób sprawdzimy, czy w buforze MIDI są jakiekolwiek dane do analizy. Kod funkcji pokazano na listingu 5.
Listing 5. Funkcja sprawdzająca obecność danych w buforze MIDI (zwraca wartość różną od 0, gdy w buforze znajdują się dane)
uint8_t MIDIisReady(void){
return midiBuffer.Bytes;
}Obsługa interfejsu MIDI korzysta z typowych mechanizmów obsługi programowych buforów kołowych i dzięki temu odbierane dane możemy analizować w dogodnej chwili.
Pora na przedstawienie bardzo prostej implementacji 8-kanałowego, 7-bitowego generatora PWM, za pomocą którego sterowane są kanały wyjściowe. Częstotliwość przebiegu PWM ustawiono na 100 Hz, co z powodzeniem wystarczy do sterowania diodami (taśmami) LED. Implementacja jest typowym rozwiązaniem i korzysta z wbudowanego w strukturę mikrokontrolera układu czasowo-licznikowego TIMER0 pracującego w trybie CTC i taktowanego sygnałem zegarowym mikrokontrolera podzielonym przez 8 (czyli 1 MHz). Konfigurację pokazano na listingu listingu 6.
Listing 6. Funkcja przygotowująca Timer0 do pracy jako programowy generator PWM
#define PWM_PORT PORTB
#define PWM_DDR DDRB
void PWMinit(void){
PWM_DDR = 0xFF; //Port PWM, jako wyjściowy
TCCR0A = (1<<WGM01); //Tryb CTC
OCR0A = 77; //Przerwanie 12800 razy na sekundę
TCCR0B = (1<<CS01); //Preskaler = 8
TIMSK = (1<<OCIE0A); //Aktywacja przerwania Timer/Counter0 Output Compare Match A
}Tak zainicjowany układ czasowo-licznikowy Timer0 będzie zgłaszał przerwanie od porównania stanu licznika z rejestrem porównania OCR0A 12800 razy na sekundę, co przy założonej rozdzielczości kanałów PWM równej 7 bitów spowoduje generowanie przebiegu PWM o częstotliwości 100 Hz (na każdym z kanałów). Ciało obsługi funkcji odpowiedzialnej za realizację programowego generatora PWM pokazano na listingu 7.
Listing 7. Funkcja obsługi przerwania układu Timer0 realizująca 8-kanałowy generator PWM
ISR(TIMER0_COMPA_vect){
static uint8_t Counter;
Counter = (Counter +1) & 0x7F; //Licznik 7-bitowy
for(uint8_t i=0; i<8; ++i){
if(Counter < PWM[i]) PWM_PORT |= (1<<(7-i));
else PWM_PORT &= ~(1<<(7-i));
}
}Funkcja jest na tyle prosta, że nawet jej częste wywoływanie nie obciąży za bardzo mikrokontrolera i nie będzie kolidowało z funkcją przerwania obsługującą interfejs MIDI.
Montaż i uruchomienie
Schemat montażowy urządzenia MidiLights pokazano na rysunku 2.

Zaprojektowano bardzo zwarty obwód drukowany przeznaczony do montażu elementów przewlekanych. Montaż rozpoczynamy od wlutowania układów scalonych i rezonatora kwarcowego. Dalej lutujemy stabilizator napięcia, tranzystory, diodę D1, rezystory i kondensatory a na samym końcu gniazda połączeniowe i zadajnik kodu CHANNEL. Poprawnie zmontowany układ nie wymaga żadnych regulacji i powinien działać zaraz po włączeniu zasilania. W przypadku przełączania dużej liczby diod lub taśm LED może zaistnieć potrzeba wyposażenia tranzystorów T1…T8 w stosowne do przełączanej (a dokładnie traconej) mocy radiatory. Dla napięcia sterującego bramką tranzystora MOSFET rzędu VGS = 5 V moc traconą możemy z pewnym przybliżeniem obliczyć ze wzoru:
P= I2·RDS(ON)
gdzie I to prąd przewodzenia diod LED, zaś RDS(ON) to rezystancja dren-źródło tranzystora w stanie załączenia równa około 0,1 Ω.
Zmontowane urządzenie MidiLights pokazano na fotografii tytułowej. Na rysunku 3 zamieszczono przykładowy sposób podłączenia urządzenia MidiLights dla przypadku sterowania grupą diod LED.

Podłączenie gotowych taśm LED będzie wyglądało nieco inaczej, gdyż taśmy takie mają zintegrowane rezystory ograniczające prąd diod LED, przy czym należy mieć na uwadze, że zaciski 1…8 złącza podłączeniowego to wyjścia tranzystorów sterujących poszczególnymi kanałami PWM, zaś zacisk 9 to połączenie masowe (wspólne).
Robert Wołgajew, EP
CKSEL3…0: 1101
SUT1…0: 11
CKDIV8: 1
CKOUT: 1
- R1: 22 kΩ
- R2, R3: 220 Ω
- C1, C2: ceramiczny 22 pF
- C3, C4, C6: ceramiczny 100 nF
- C5, C7: elektrolityczny 100 μF/16 V
- U1: 7805 (TO-220)
- U2: ATtiny2313 (DIL-20)
- U2: 6N138 (DIL-08)
- T1…T8: BUZ11 (TO-220)
- D1: 1N4148 (DO-35)
- Q1: rezonator 8 MHz (raster 0,2”)
- PWR: złącze AK500/2 (raster 0,1”)
- LED: złącze AK500/9 (raster 0,1”)
- CHANNEL: zadajnik kodu HEX/BCD typu ERD216RSZ
- MIDI-IN: gniazdo DIN-5 do montażu THT












