 Zaloguj
Zaloguj



- sterowanie jednym bipolarnym silnikiem krokowym,
- płynna regulacja szybkości obrotowej za pomocą potencjometru,
- możliwość zmiany kierunku obrotów z użyciem przełącznika,
- pięć rodzajów sterowania silnikiem: pełne kroki, 1/2 kroku, 1/4 kroku, 1/8 kroku lub 1/16 kroku,
- częstotliwość impulsów taktujących pracę silnika: 6…2300 Hz,
- możliwość zatrzymania ruchu silnika przełącznikiem,
- napięcie zasilania: 9…32 V,
- pobór prądu: min. 10 mA (w stanie spoczynku),
- prąd uzwojeń ustalany potencjometrem.
Opisany w artykule układ ma bardzo proste zadanie: wprawić silnik krokowy w ruch. Tylko tyle i aż tyle. Potencjometrem można ustalić tempo przełączania jego uzwojeń, przełącznikiem – kierunek obrotów, zaś potrójnym przełącznikiem typu DIP-Switch rozdzielczość sterowania. Bez mikrokontrolerów, bez montażu powierzchniowego – prosto i na temat.
Większość podzespołów odpowiedzialnych za obsługę silnika została skupiona w jednym, niewielkim module o przystępnej cenie i naprawdę niemałych możliwościach. Zadaniem opisanego dalej układu jest zapewnienie mu odpowiedniego otoczenia do prawidłowej pracy.
Budowa
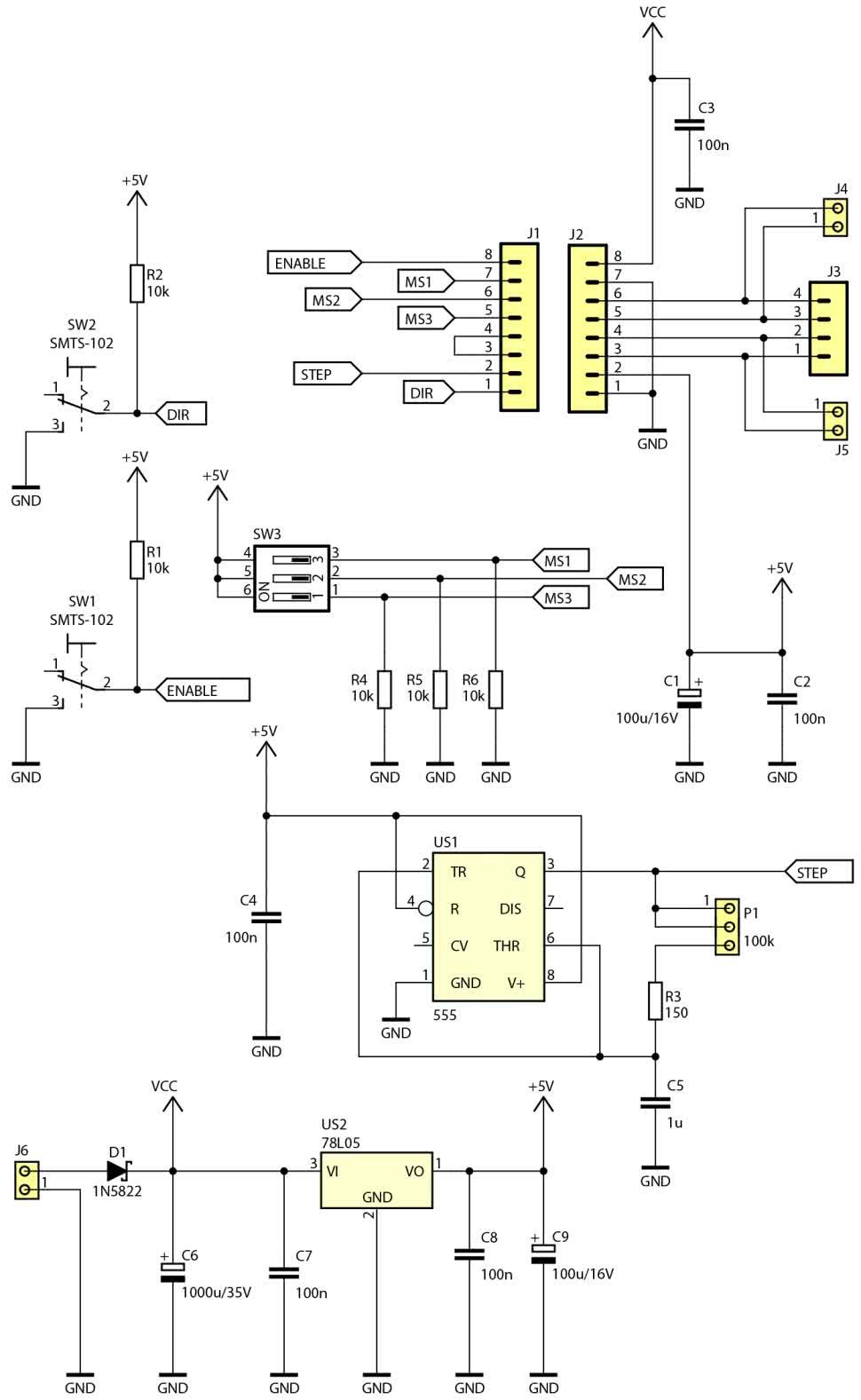
Schemat ideowy omawianego układu znajduje się na rysunku 1. Głównym podzespołem wcale nie jest mikrokontroler, a gotowy moduł typu stepstick z układem A4988 firmy Allegro MicroSystems. Na niewielkiej płytce znajduje się sam układ scalony oraz niezbędne elementy bierne. Wśród nich jest również miniaturowy potencjometr ustalający średni prąd cewek silnika, który to parametr ma wpływ zarówno na pobór prądu przez cały układ, jak i na moment trzymający silnika.
Do tego modułu trzeba doprowadzić zasilanie części cyfrowej (VDD: 3…5,5 V), zasilanie silnika (VMOT: 8…35 V) oraz sygnały sterujące, takie jak:
- aktywowanie niskim stanem logicznym (ENABLE),
- rodzaj pracy silnika: pełnokrokowa, półkrokowa itd. (MS1, MS2, MS3),
- zerowanie niskim stanem logicznym (RESET) i uśpienie modułu niskim stanem logicznym (SLEEP) – obydwie linie połączone ze sobą z użyciem rezystora podciągającego wejście RESET,
- taktowanie kolejnych kroków silnika (STEP),
- ustalenie kierunku obrotów silnika (DIR).
Sam silnik podłączyć należy do wyprowadzeń złącza J3 (listwa goldpin) albo J4+J5 (listwy zaciskowe). Nie trzeba przy tym pamiętać o zewnętrznych diodach zabezpieczających albo o elementach kontrolujących prąd uzwojeń, ponieważ wszystkie te podzespoły są już zawarte na płytce modułu oraz w samym układzie A4988. Z tego powodu jego zastosowanie bardzo upraszcza realizację układu. Również wbudowane w strukturę A4988 zabezpieczenia, takie jak ochrona przed zwarciem do masy lub przegrzaniem, podnoszą walory użytkowe stepsticka. Kondensatory C1…C3 odsprzęgają zasilanie na obu liniach.
Za pomocą przełączników SW1 i SW2 użytkownik może ustalić, odpowiednio, aktywację silnika oraz kierunek jego obrotów. Rezystory podciągające R1 i R2 ustalają wysoki stan logiczny po rozwarciu styków tychże przełączników. Układ A4488, znajdujący się w module sterującym silnikiem krokowym daje możliwość wyboru jednego z pięciu rodzajów sterowania silnika. Dokładniej rzecz ujmując, chodzi o liczbę kroków, które silnik wykona na każdy takt sygnału sterującego. Do ustalenia pożądanej wartości służy przełącznik typu DIP-Switch SW3. Rezystory R4…R6 ustalają domyślnie niskie stany logiczne na omówionych wcześniej wejściach MS1…MS3, zaś załączenie sekcji przełącznika powoduje wymuszenie stanu wysokiego.
W tym układzie sygnał taktujący pracę silnika nie pochodzi z układu programowalnego, lecz z prostego generatora astabilnego, zbudowanego w oparciu o popularną kostkę typu 555. Częstotliwość impulsów ustalają: pojemność kondensatora C5 oraz wypadkowa rezystancja szeregowego połączenia rezystora R3 i wolnego odcinka ścieżki oporowej potencjometru P1. R3 determinuje maksymalną częstotliwość tych impulsów, co dodatkowo chroni wyjście układu US1 przed przeciążeniem w razie konieczności przeładowywania C5 bezpośrednio.
Napięcie 5 V do zasilania części cyfrowej układu dostarcza zwykły stabilizator liniowy typu 78L05. Pobór prądu przez układ jest niewielki, więc nawet przy wysokim napięciu zasilającym moc strat w nim nie będzie uzasadniała zastąpienia go przetwornicą impulsową. Dioda D1 zabezpiecza układ przed zniszczeniem w razie pomyłkowej zamiany biegunów napięcia zasilającego. Kondensator C6 o znacznej pojemności chroni część cyfrową układu przed chwilowymi zanikami napięcia, jakie mogą mieć miejsce w momencie przełączania uzwojeń silnika, kiedy to pobór prądu przez sterownik jest wyższy niż w stanie ustalonym.
Montaż i uruchomienie
Układ został zmontowany na jednostronnej płytce drukowanej o wymiarach 80 mm × 45 mm. Jej wzór ścieżek oraz schemat montażowy pokazano na rysunku 2.
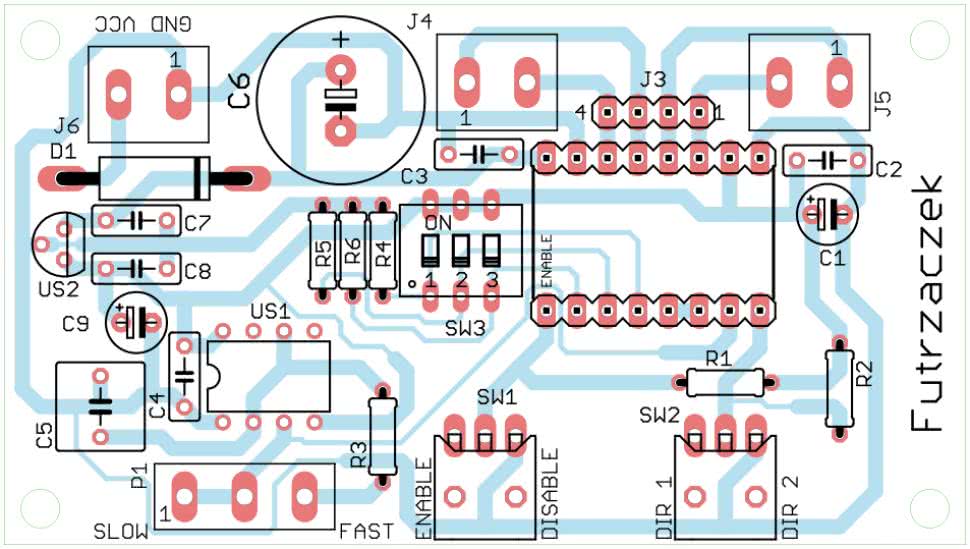
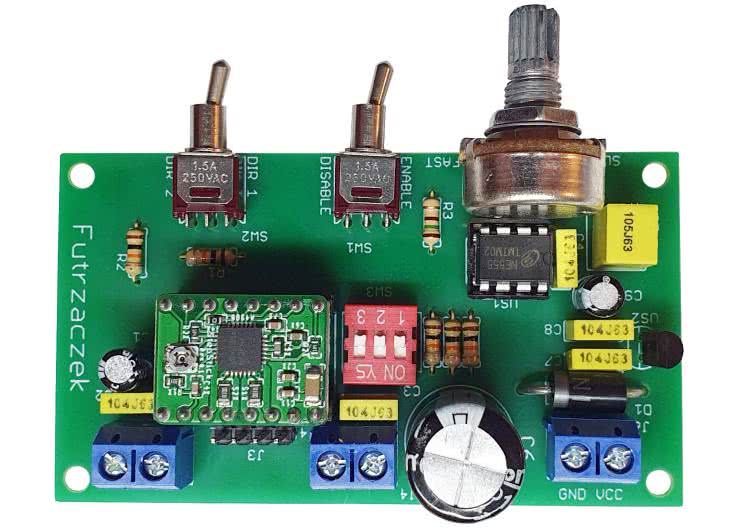
Montaż proponuję rozpocząć od elementów o najmniejszej wysokości obudowy, czyli rezystorów. Pozostałe elementy można montować według rosnącej wysokości ich obudowy. Pod układ scalony US1 proponuję zastosować podstawkę, aby ułatwić jego wymianę w razie uszkodzenia. Po wlutowaniu wszystkich podzespołów i sprawdzeniu poprawności montażu w złącza J1 i J2 można włożyć moduł z układem A4988. Polecam przy tym kierować się opisem na płytce drukowanej, który wskazuje wyprowadzenie ENABLE – na spodzie laminatu modułu A4988 można odnaleźć opisy nóżek. Odwrotne włożenie modułu może poskutkować jego zniszczeniem, dlatego jest to tak istotna kwestia. Zmontowany układ widać na fotografii tytułowej.
Poprawnie zmontowany układ jest gotowy do działania po podłączeniu zasilania do zacisków złącza J6. Powinno to być napięcie stałe, dobrze filtrowane, lecz niekoniecznie stabilizowane. Jego wartość powinna wynosić 9…32 V z uwagi na graniczne warunki pracy stabilizatora US2 i modułu A4988 oraz wytrzymałość kondensatorów elektrolitycznych. Pobór prądu z tego źródła silnie zależy od stanu pracy układu oraz ustawionego potencjometrem montażowym (na płytce modułu) prądu uzwojeń silnika. W stanie spoczynku pobór prądu wynosi około 10 mA. Układ A4988 pozwala ustawić prąd do 2 A na każdą z cewek silnika, lecz przy pracy powyżej 1 A jest wymagany radiator. Kierunek podłączenia uzwojeń silnika do zacisków na płytce trzeba dobrać doświadczalnie.
Obsługa układu jest bardzo prosta: przełącznikiem SW1 można załączyć lub wyłączyć obracanie się silnika, zaś za pomocą SW2 – zmienić kierunek jego obrotów. Potencjometrem P1 można zmieniać częstotliwość sygnału sterującego silnikiem w zakresie od ok. 6 Hz do ok. 2,3 kHz.
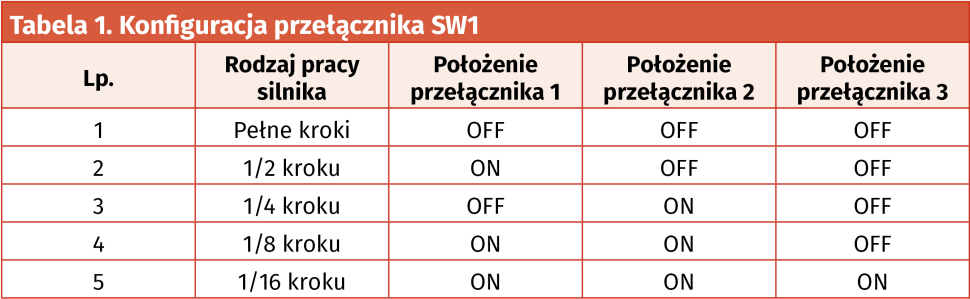
Celem uniknięcia nadmiernego poboru mocy przez układ rekomenduję ustawienie możliwie niskiego prądu uzwojeń silnika poprzez regulację niewielkiego potencjometru montażowego na płytce modułu. Układ A4988 nie będzie się wówczas przegrzewał, być może nawet nie będzie wymagał naklejenia radiatora. Warto również skonfigurować, zgodnie z tabelą 1, pożądany rodzaj pracy silnika. Im drobniejsze kroki wykonuje, tym bardziej płynna staje się jego praca, lecz z mniejszą szybkością może się obracać.
Michał Kurzela, EP
- R1, R2, R4…R6: 10 kΩ
- R3: 150 Ω
- P1: 100 kΩ liniowy, na panel
- C1, C9: elektrolityczny 100 μF/16 V, raster 2,5 mm
- C2…C4, C7, C8: MKT 100 nF, raster 5 mm
- C5: MKT 1 μF, raster 5 mm
- C6: elektrolityczny 1000 μF/35 V, raster 5 mm
- D1: 1N5822
- US1: 555 (DIP8)
- US2: 78L05 (TO92)
- J1, J2: goldpin 8 pin żeński, 2,54 mm THT
- J3: goldpin 4 pin męski, 2,54 mm THT
- J4…J6: ARK2/500
- SW1, SW2: SMTS-102
- SW3: DIP-Switch 3 sekcje THT, np. DIP SWITCH03
- Jedna podstawka DIP8
- Moduł stepstick z układem A4988 np. ARD-6332
- Silnik krokowy bipolarny












