 Zaloguj
Zaloguj




- Regulacja mocy prądu dostarczanego do obciążenia 230 V AC.
- Interfejs użytkownika na bazie wyświetlacza graficznego i impulsatora z przyciskiem.
- Wyświetlanie parametrów napięcia, prądu, przesunięcia fazowego itp.
- Graficzne obrazowanie parametrów.
- Mikrokontroler sterujący – STM32, element wykonawczy – triak.
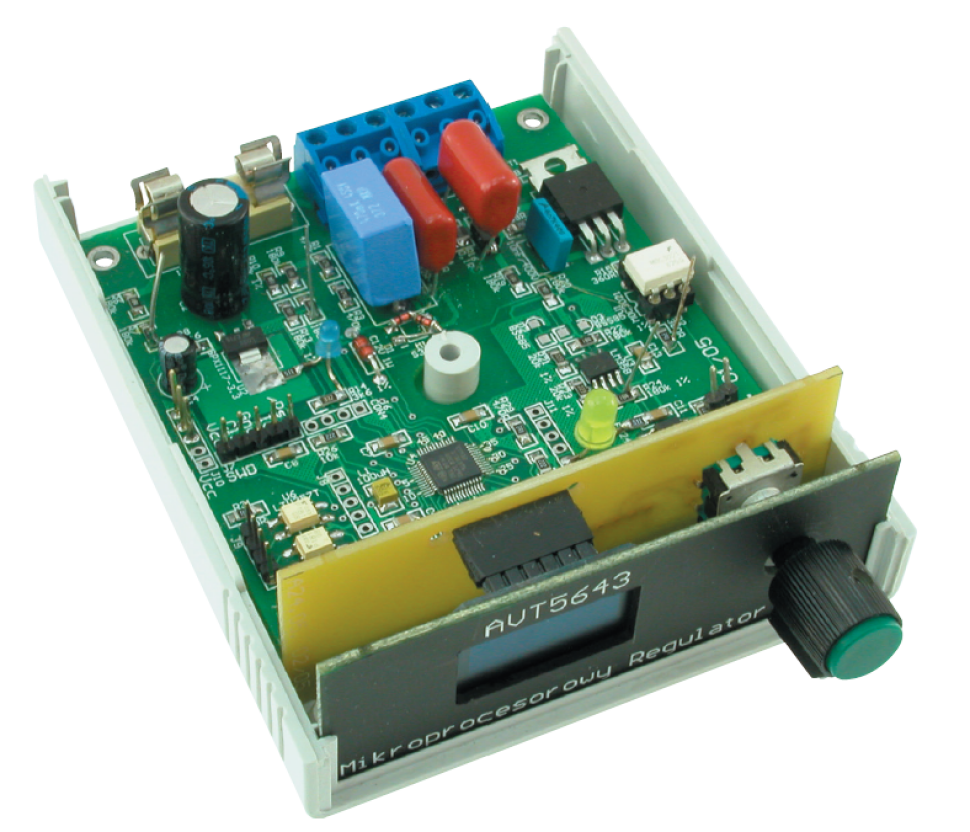
- Płytka przystosowana do obudowy KM-35.
Ostrożnie! Regulator mocy jest galwanicznie połączony z siecią 230 V AC. Podczas uruchamiana i użytkowania należy zachować szczególną ostrożność. Dodatkowo, przy uruchamiania zalecane jest użycie transformatora separującego.
Schemat ideowy proponowanego rozwiązania regulatora mocy pokazano na rysunku 1. Jest on zasilany z sieci 230 V AC. Zasilacz beztransformatorowy, którego głównymi elementami są kondensator C1 i układ U2, zasila mikrokontroler STM32F103C8T6. Zastosowanie mikrokontrolera z rdzeniem 32-bitowym może wydawać się przesadą, jednak bufor wyświetlacza OLED wymaga użycia 1 kB pamięci RAM, a do tego bufora na próbki napięcia i prądu również po 1 kB. Uwzględniając inne zmienne programu, wymaga to użycia mikrokontrolera z 4 kB pamięci RAM, co zmusza do użycia mikrokontrolera w obudowie z 44 lub 64 wyprowadzeniami, z dużą ilością pamięci Flash (na przykład z rodziny AVR mogą to być ATmega64, ATmega644, ATMega128). Porównując ceny takich procesorów z STM32F, wybór jest łatwy – po prostu STM32 jest: tańszy, bardziej wydajny, bogato wyposażony w bloki funkcjonalne (DMA, duża liczba interfejsów komunikacyjnych, dwa szybkie przetworniki A/C), duża ilość RAM i Flash, a przy tym łatwiej pisze się program, ponieważ nie trzeba pamiętać o różnych sposobach i deklaracjach przy dostępie do zmiennych w Flash i RAM.
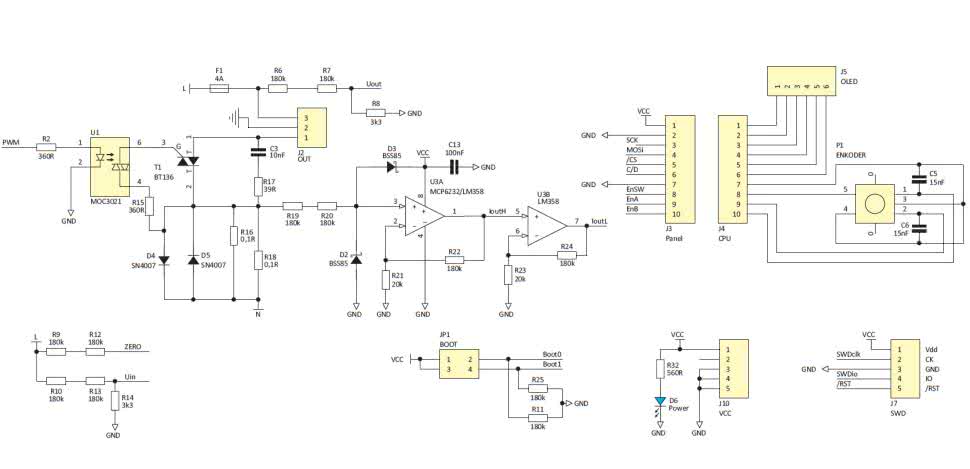

Mikrokontroler jest taktowany wewnętrznym oscylatorem RC o częstotliwości 8 MHz. Blok PLL mnoży tę częstotliwość dwa razy. Dzięki temu wszystkie elementy mikrokontrolera (CPU, timery, USART, itd.) są taktowane częstotliwością 16 MHz. Nieduża częstotliwość taktująca oraz usypianie układu wpłynęło korzystnie na pobór prądu i generowanie mniejszych zakłóceń EMI.
Napięcie sieciowe, po podzieleniu za pomocą dzielnika rezystorowego złożonego z oporników R10, R13, R14, jest mierzone przetwornikiem A/C wbudowanym w mikrokontroler. Prąd płynący do obciążenia wywołuje spadek napięcia na boczniku R16 (R18). To napięcie to wzmacnianie dziesięciokrotnie we wzmacniaczu U3A. Wzmacniacz U3B wzmacnia o kolejne 10 razy – sumaryczne wzmocnienie wynosi 100, co umożliwia prądu o niewielkim natężeniu. Rezystory R6…R8 pozwalają stwierdzić, czy bezpiecznik nie jest spalony, a R9 i R12 służą do wykrywania przejścia napięcia sieci przez zero. Triak jest sterowany optotiakiem pełniącym funkcję bufora prądowego. Większość triaków wymaga prądu bramki 20…30 mA, a optotiak zadowoli się prądem 1...5 mA. Kondensator C3 i rezystor R17 są zalecane przy obciążeniach indukcyjnych. Wymagane przesunięcie fazowe dla silników jest realizowane w sposób programowy. Diody D4, D5 zabezpieczają rezystory R16 (R18) przed przepływem zbyt dużego prądu. Rezystory R19, R20 oraz diody D2, D3 zabezpieczają wzmacniacz operacyjny przed uszkodzeniem w wypadku uszkodzenia opornika R16 (R18) lub diod D4, D5.
W pamięci EEPROM (U5) są zapisywane ustawienia regulatora. Układy U6 i U7 zapewniają izolację interfejsu UART. Interfejs ten otwiera drogę do zdalnego sterowania regulatorem, odczytywania wyników pomiaru. Komunikację z użytkownikiem zapewnia wyświetlacz graficzny OLED oraz enkoder impulsowy z przyciskiem.
Montaż i uruchomienie
Schemat montażowy regulatora zamieszczono na rysunku 2. Montaż jest typowy i nie wymaga szczegółowego omawiania. Wyświetlacz warto dołączyć za pomocą złącza typu goldpin. Kątowy goldpin łączący płytki należy lutować po umieszczeniu i dopasowaniu płytek oraz wyświetlacza w obudowie. Aby płytka z wyświetlaczem nie uginała się podczas naciskania enkodera, na płytce głównej wyświetlacza, po prawej stronie przewidziano po dwa punkty lutownicze, do których można przylutować elementy usztywniające.
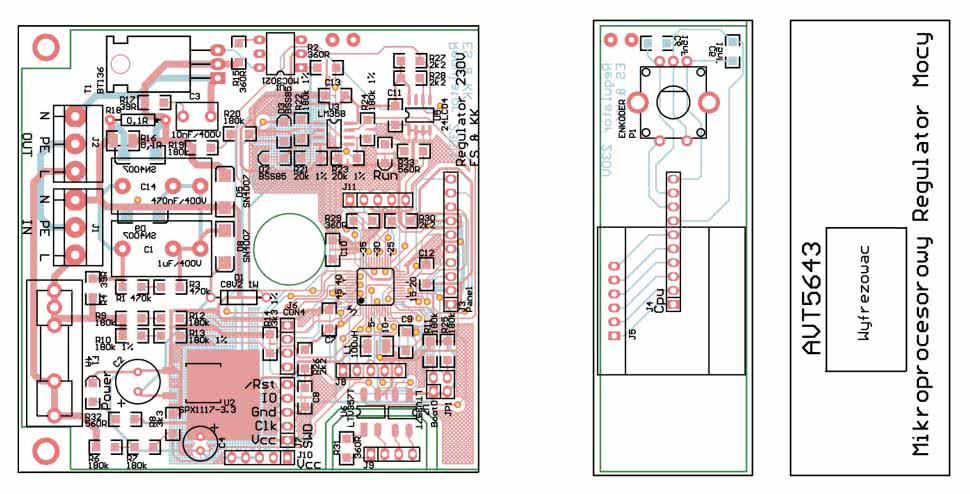
W pierwszej kolejności należy zamontować elementy zasilacza i uruchomić go. Jeśli pracuje prawidłowo, można wlutować pozostałe elementy. Na płytce przewidziano miejsce na dwa rezystory: R16 (SMD 1210) o rezystancji 0,1 V, oraz R18 do montażu przewlekanego. Należy wlutować tylko jeden z nich. Rezystor o mocy 1 W wytrzyma prąd o natężeniu do 10 A, co pozwala na obciążenie regulatora odbiornikiem o mocy do około 2000 W. Triak bez radiatora można obciążyć prądem 1…2 A, co pozwala na obciążenie odbiornikiem o mocy 200…400 W. Przy większej mocy obciążenia konieczne jest zastosowanie radiatora.
Obsługa
Po włączeniu zasilania jest wyświetlany ekran powitalny, a po nim diagnostyczny. Na ekranie znajdują się informacje o dacie i godzinie kompilacji. Przeprowadzane jest też skanowanie magistrali I2C. W czasie wyświetlania ekranu diagnostycznego są odczytywane nastawy z pamięci EEPROM i jest odtwarzany stan sprzed wyłączenia regulatora. Po pierwszym uruchomieniu wyjście będzie wyłączone, moc ustawiona na 0% i będzie pokazywany ekran z oscylogramem napięcia wejściowego.
Moc wyjściową można zmniejszać/zwiększać za pomocą pokręcania enkoderem. Krótkie naciśnięcie jego ośki zmienia wyświetlany ekran w następującej sekwencji:
- Ekran 1: oscylogram napięcia sieciowego.
- Jak wyżej + parametry napięcia.
- Ekran 2: oscylogram prądu dla wzmocnienia 10.
- Jak wyżej + parametry prądu.
- Ekran 3: oscylogram prądu dla wzmocnienia 100.
- Jak wyżej + parametry prądu.

Przytrzymanie ośki przez około 1 sekundę włącza/wyłącza prąd obciążenia. Wyłączenie jest sygnalizowane miganiem wskaźnika nastawy mocy i mocy pobieranej. Brak obciążenia, gdy regulator jest włączony (wskaźnik nastawy mocy nie mruga), sygnalizuje miganie wskaźnika poboru mocy (komunikatu „0W”). Uszkodzenie bezpiecznika jest sygnalizowane w oknie.
Wszystkie nastawy są zapisywane w pamięci EEPROM po 5 sekundach bezczynności, o czym informuje komunikat na ekranie wyświetlacza.
Wyjaśnienia wymaga różnica pomiędzy wskazaniami „Moc ustawiona” a „Aktualna moc”. Regulator ma funkcjonalność miękkiego startu. Moc dostarczana do obciążenia (a tym samym np. obroty silnika) są zwiększane od 0 do nastawionej wartości w czasie do 2 sekund. Obok etykiety „Aktualna moc” jest pokazywana moc aktualnie dostarczana do obciążenia. Gdy wskazanie aktualne zrówna się z „Mocą nastawioną”, układ miękkiego startu zakończy działanie.
„Punkt wyzwolenia triaka” pokazuje moment wyzwolenia triaka dla dodatniej i ujemnej (niewidocznej) połówki przebiegu. Początek ekranu jest punktem zero. Jest to moment, w którym zmienia się znak napięcia przemiennego.
Na poszczególnych ekranach są wyświetlane następujące informacje:
- Ekran 1: Urms – wejściowe napięcie skuteczne w [V], Śr – napięcie średnie półokresowe, m – wartość maksymalna, x – moment załączenia triaka dla połówki dodatniej, y – moment załączenia triaka dla połówki ujemnej, z – przesunięcie prądu (w próbkach), w – liczba zebranych próbek dla jednej połówki sinusoidy.
- Ekran 2: Irms – prąd RMS (dla sinusoidy wartość skuteczna) obciążenia w mA, śr – prąd średni, m – prąd maksymalny, PHrms – moc RMS (dla sinusoidy wartość skuteczna) obciążenia w [W], śr – moc średnia, m – moc maksymalna, Faza – przesunięcie prądu względem napięcia w stopniach, CosFi – współczynnik CosFi (Faza i CosFi są wyświetlane tylko dla mocy ustawionej na 100%).
- Ekran 3: ILrms – prąd RMS (dla sinusoidy wartość skuteczna) obciążenia w mA, śr – prąd średni, m – prąd maksymalny, PLrms – moc RMS (dla sinusoidy wartość skuteczna) obciążenia w [W], śr – moc średnia, m – moc maksymalna, Faza – przesunięcie prądu względem napięcia w stopniach, CosF – współczynnik CosFi (Faza i CosFi są wyświetlane tylko dla mocy ustawionej na 100%).
Ekran diagnostyczny
Ponadto wyświetlane są takie informacje, jak: nazwa urządzenia, data i godzina kompilacji, układy odnalezione na magistrali I2C, Rst – liczbo resetów od inicjalizacji EEPROM, Wr – liczbo zapisów do pamięci od jej inicjalizacji, WrAll – całkowita liczba zapisów pamięci od jej zamontowania.
Regulatora można użyć do pomiaru przesunięcia pomiędzy prądem a napięciem, co daje możliwość dobrania elementów kompensujących. Można się więc nim posłużyć do sprawdzenia działania „oszczędzaczy energii”, to znaczy pomiaru, na ile blisko zera sprowadzają one przesunięcie fazowe, co oczywiście i tak nie będzie miało wpływu na wysokość rachunków za energię, chyba że taka czynność jest wykonywana w ogromnym zakładzie przemysłowym, o poborze mocy rzędu megawatów. W aktualnej wersji oprogramowania przesunięcie jest obliczane tylko dla nastawy „100%”.
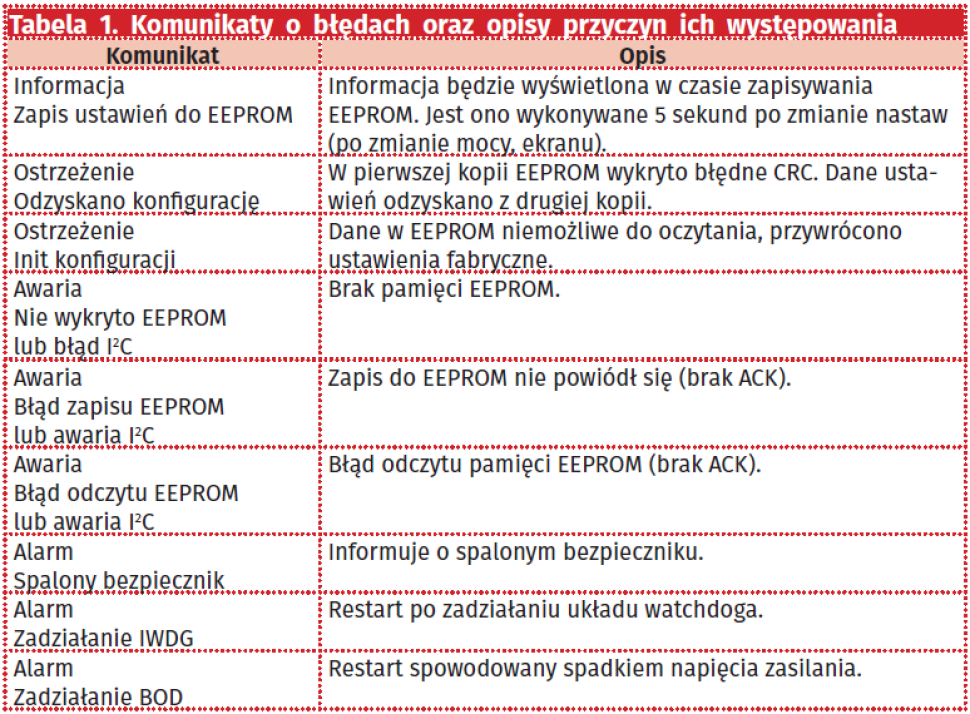
Komunikaty wyświetlane podczas użytkowania regulatora oraz opis ich znaczenia umieszczono w tabeli 1.
ES2 & KK, EP
es2@ep.com.pl
k2@ep.com.pl
- R1, R3: 470 kΩ
- R2, R15, R29, R31: 360 Ω
- R4, R17: 39 Ω
- R6, R7, R9, R11, R12, R19, R20, R25: 180 kΩ
- R8: 3,3 kΩ
- R10, R13, R22, R24: 180 kΩ/1%
- R14: 3,3 kΩ/1%
- R16: 0,1 Ω/1% (SMD 1210, 1 W)
- R18: 0,1 Ω/1% (THT, 1 W)
- R21, R23: 20 kΩ/1%
- R26…R28, R30: 2,2 kΩ
- R32, R33: 560 Ω
- C1: 1 μF/400 V (18×10, MKP)
- C4: 100 μF/16 V (elektrolit.)
- C14: 470 nF/400 V (18×10, MKP)
- C2: 1000 μF/16 V (elektrolit.)
- C3: 10 nF/400 V (MKP)
- C5, C6: 15 nF (SMD 1206)
- C7…C13: 100 nF (SMD 1206)
- U1: MOC3021 (DIP6)
- U2: SPX1117-3.3 (SOT-223)
- U3: LM358 (SO-8)
- U4: STM32F103C8T6 (LQFP-48)
- U5: 24LC04 (SO-8)
- U6, U7: LTV357T (MFP4)
- D1: C8V2/1 W (dioda Zenera 8,2 V)
- D2, D3: BSS85 (SMD)
- T1: BT136 (TO-220)
- D4, D5, D8: SN4007
- D6: LED niebieski (SMD 1206)
- D7: LED żółty (SMD 1206)
- J5: wyświetlacz OLED 0,96” 128×64 niebieski SPI
- F1: bezpiecznik 4 A z gniazdem
- L1: 100 μH (SMD 1210)
- P1: impulsator z przyciskiem
- J1, J2: złącze ARK3
- J3: goldpin kątowy 1×10
- J7: złącze ZL201-05G
- Obudowa KM-35N












