 Zaloguj
Zaloguj



Projekt sterownika zaczerpnięto ze strony http://usuaris.tinet.org/fmco. Wprowadzono niewielkie zmiany: dodano diodę informującą o włączonym napięciu zasilającym, zmieniono rodzaj tranzystorów sterujących przekaźnikiem, zmieniono mikrokontroler z SMD na DIP oraz przystosowano płytkę do obudowy Z-70U.
Budowa i zasadza działania
Schemat ideowy sterownika rozjazdów pokazano na rysunku 1. Napięcie zasilające, które może pochodzić z torowiska lub lepiej z osobnego zasilacza przeznaczonego do zasilania akcesoriów dodatkowych, jest prostowane za pomocą mostka diodowego D1, a następnie stabilizowane przez stabilizator U1.
Jeśli napięcie zasilające będzie przekraczało 12 V, konieczne może się okazać zamontowanie radiatora (typowy serwomechanizm o standardowej wielkości pobiera podczas pracy prąd o natężeniu ok. 160 mA, co może wywołać duże straty mocy na stabilizatorze). Dane DCC doprowadzone do złącza J2 po przejściu przez transoptor trafiają do mikrokontrolera, który je dekoduje.

Rysunek 1. Schemat ideowy sterownika rozjazdów |
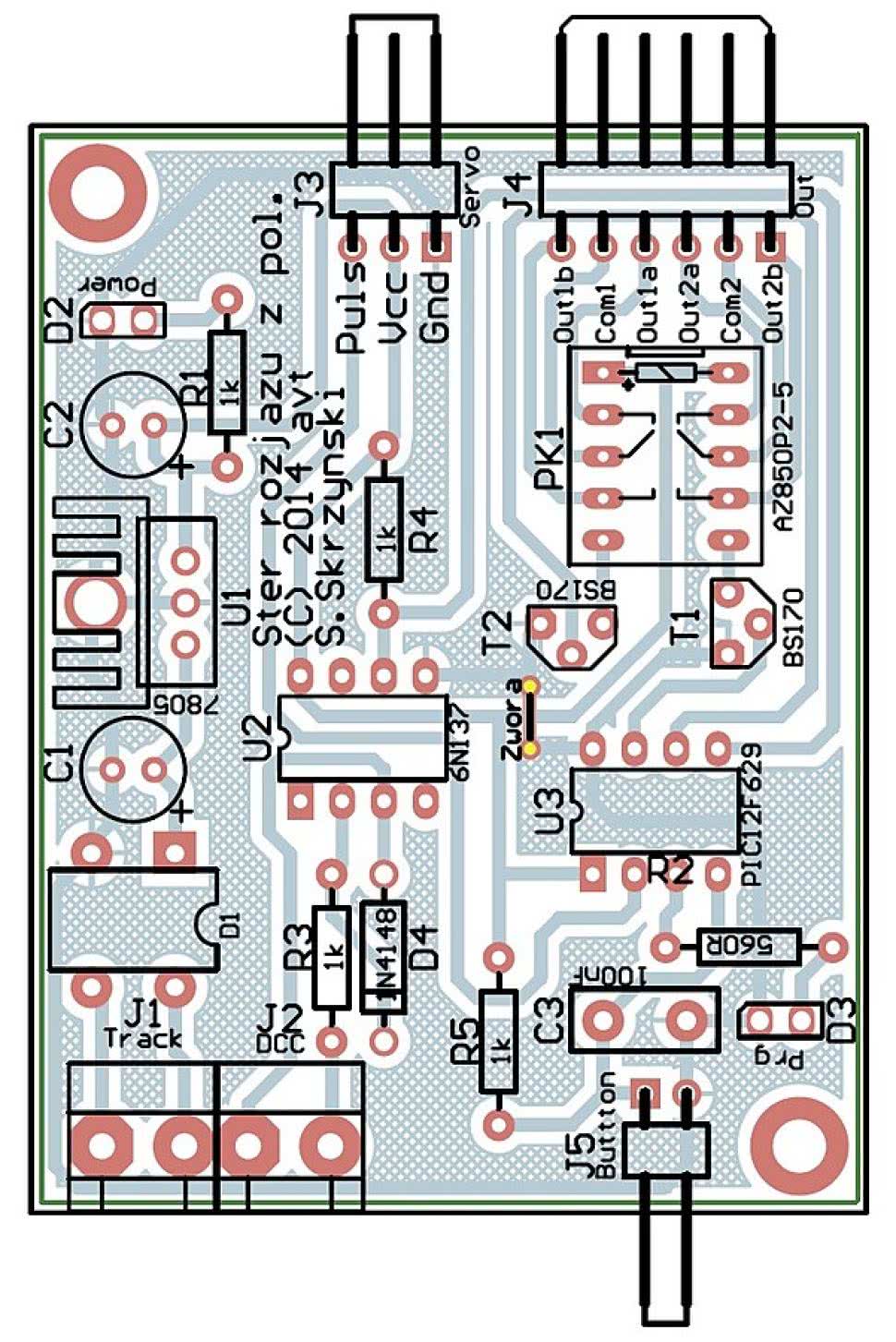
Rysunek 2. Schemat montażowy sterownika rozjazdów |
Jeśli rozkaz dotyczy sterownika rozjazdu, to serwomechanizm dołączony do wtyku J3 jest odpowiednio sterowany. Oprócz tego może zmienić się położenie przekaźnika bistabilnego sterowanego tranzystorami T1 i T2. Dzięki użyciu tranzystorów MOS nie ma konieczności stosowania rezystorów ograniczających prąd sterujący oraz diod tłumiących przepięcia powstające w chwili wyłączenia przekaźnika.
Przekaźnik bistabilny do przełączenia styków potrzebuje krótkiego impulsu, dzięki czemu prąd jest pobierany tylko przez kilkadziesiąt milisekund, co przekłada się na mniejsze zużycie energii przez sterownik. Do złącza J5 można dołączyć przycisk, którym można zmieniać ręcznie położenie rozjazdu. Przycisk ten służy także do konfigurowania sterownika.
Wykaz elementówRezystory: Kondensatory: Półprzewodniki: Inne: |
Montaż i uruchomienie
Schemat montażowy sterownika rozjazdów pokazano na rysunku 2. Montaż jest typowy i nie wymaga omawiania. Pod mikrokontroler warto zastosować podstawkę. Jeśli mikrokontroler nie był zaprogramowany, do jego pamięci Flash należy wgrać plik ServoPoint. hex. Plik ten zawiera bity konfiguracyjne, jeśli jednak programator nie korzysta z tych informacji, ustawienie bitów konfiguracyjnych można zobaczyć na rysunku 3.

Rysunek 3. Ustawienie bitów konfiguracyjnych |
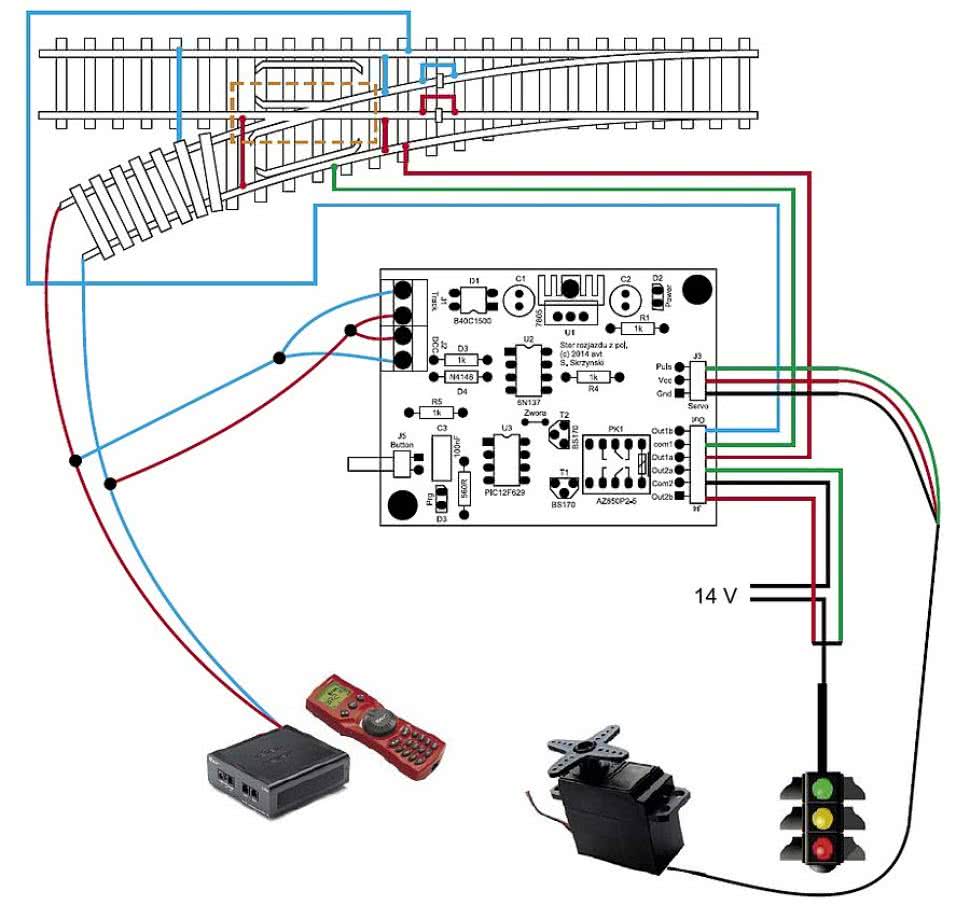
Rysunek 4. Sposób dołączenia sterownika do rozjazdu |
Po włączeniu zasilania dioda D2 powinna świecić się. Krótkie zwarcie złącza J5 powinno spowodować zmianę położenia serwomechanizmu. Jeśli wszystko działa prawidłowo, należy doprowadzić sygnał DCC do J2.
Konfigurowanie sterownika jest dość nietypowe i nie opiera się o wpisy do rejestrów CV. Aby wejść do menu konfiguracyjnego, należy zewrzeć J5 przez ponad 3 sekundy. Dioda D3 zacznie migać. Teraz w manipulatorze należy ustawić adres, na który ma reagować sterownik i wysłać rozkaz zmiany położenia rozjazdu. Dioda D3 zgaśnie.
Aby ustawić zakres pracy serwomechanizmu należy:
- Zewrzeć na ponad 3 sekundy złącze J5 - dioda D3 zacznie mrugać.
- Ponownie zewrzeć na chwilę J5 - dioda D3 zaświeci się.
- Na manipulatorze ustawić adres z zakresu 1...50 (liczba 50 odpowiada 90 stopniom) i przestawić rozjazd. Dioda D3 zgaśnie.
Aby zmienić szybkość pracy serwomechanizmu (czas zmiany położenia rozjazdu) należy:
- Zewrzeć na ponad 3 sekundy złącze J5 - dioda D3 zacznie mrugać.
- Ponownie zewrzeć na chwilę złącze J5 - dioda D3 zaświeci się.
- Jeszcze raz zewrzeć na chwilę złącze J5 - dioda D3 zacznie szybko mrugać.
- Na manipulatorze ustawić adres z zakresu 1...20 (1 najszybciej, 20 najwolniej, zalecam zakres korzystanie z zakresu 5...8; większe wartości mogą być przydatne, gdy sterownik będzie obsługiwał zapory na przejeździe kolejowym) i przestawić rozjazd. Dioda D3 zgaśnie.
Sposób dołączenia sterownika do rozjazdu pokazano na rysunku 4.

Rysunek 5. Oprogramowanie Rocrail – ekran nowego planu |

Tabela 1. Przykładowe adresy i numery portów interfejsu |
Konfigurowanie programu Rocrail
Konfigurację programu Rocrail do współpracy z centralką opisano w artykule "Moduł informacji zwrotnej S88", więc nie będę jej tu powtarzał. Aby sterować rozjazdem z programu należy:
- Zaprogramować adres sterownika sposobem opisanym wcześniej, przyjmijmy, że jest to adres 12.
- Umieścić wskaźnik myszy nad symbolem rozjazdu i nacisnąć prawy przycisk na myszce (rysunek 5).
- Wybrać Właściwości, a następnie kliknąć na zakładkę Interfejs (rysunek 6).
- Wypełnić pola Adres oraz Port i zatwierdzić przez Ok. Teraz klikając na symbol rozjazdu można zmieniać jego położenie (rysunek 7).
Adres i numer port interfejsu można obliczyć w następujący sposób:
- Adres interfejsu = adres sterownika / 4. Adres interfejsu należy zaokrąglić "w górę".
- Port interfejsu = reszta z dzielenia adresu sterownika / 4. Jeśli w wyniku otrzymamy 0, to zamieniamy wynik na 4.
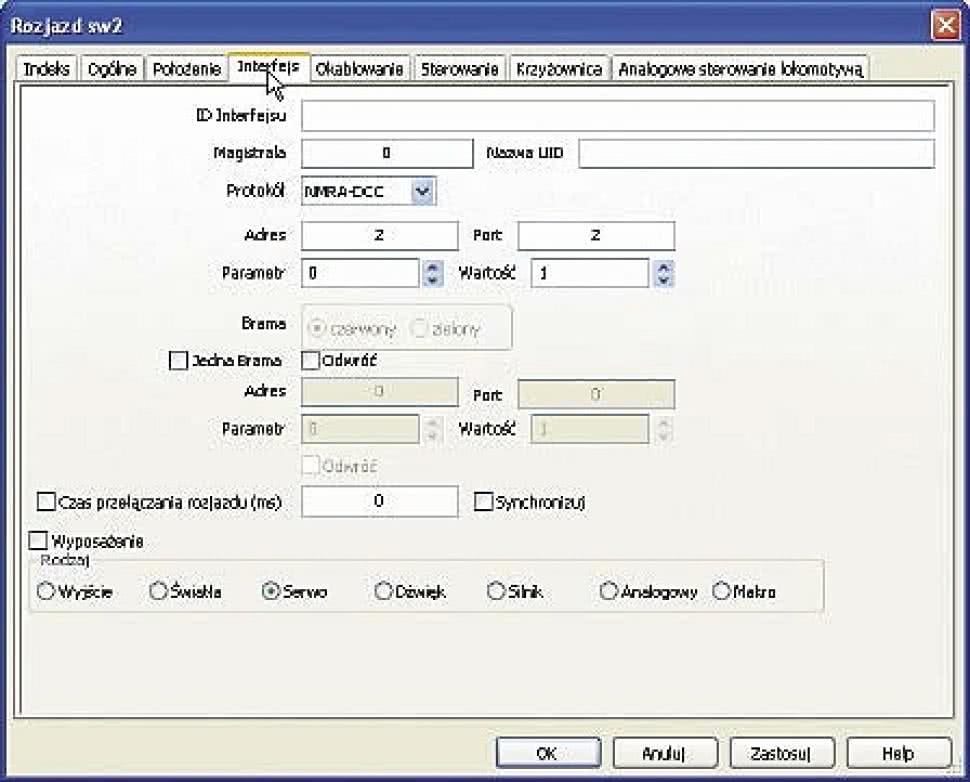
Rysunek 6. Oprogramowanie Rocrail – ekran właściwości rozjazdu |

Rysunek 7. Oprogramowanie Rocrail – ekran sterowania rozjazdami |
Przykładowe adresy i numery portów umieszczono w tabeli 1.
Formuły dla programu Microsoft Excel:
Adres interfejsu: =ZAOKR.GÓRA(ADR_STER_ROZJAZU/4;0)
Port interfejsu: =JEŻELI(MOD(ADR_ STER_ROZJAZU;4)=0;4;MOD(ADR_STER_ ROZJAZU;4))
Sławomir Skrzyński, EP












