 Zaloguj
Zaloguj



Dzięki sprzętowemu USB zyskuje się zgodność ze standardem oraz prostsze i pewniejsze sposoby oprogramowania tego interfejsu. W projekcie zastosowano mikrokontroler ATmega32U4, można również użyć jego odpowiednika o mniejszej pamięci Flash, tj. ATmega16U4. Płytkę drukowaną zaprojektowano w ten sposób, że pasuje do standardowych płytek stykowych umożliwiając szybką budowę prototypów.
Opis urządzenia
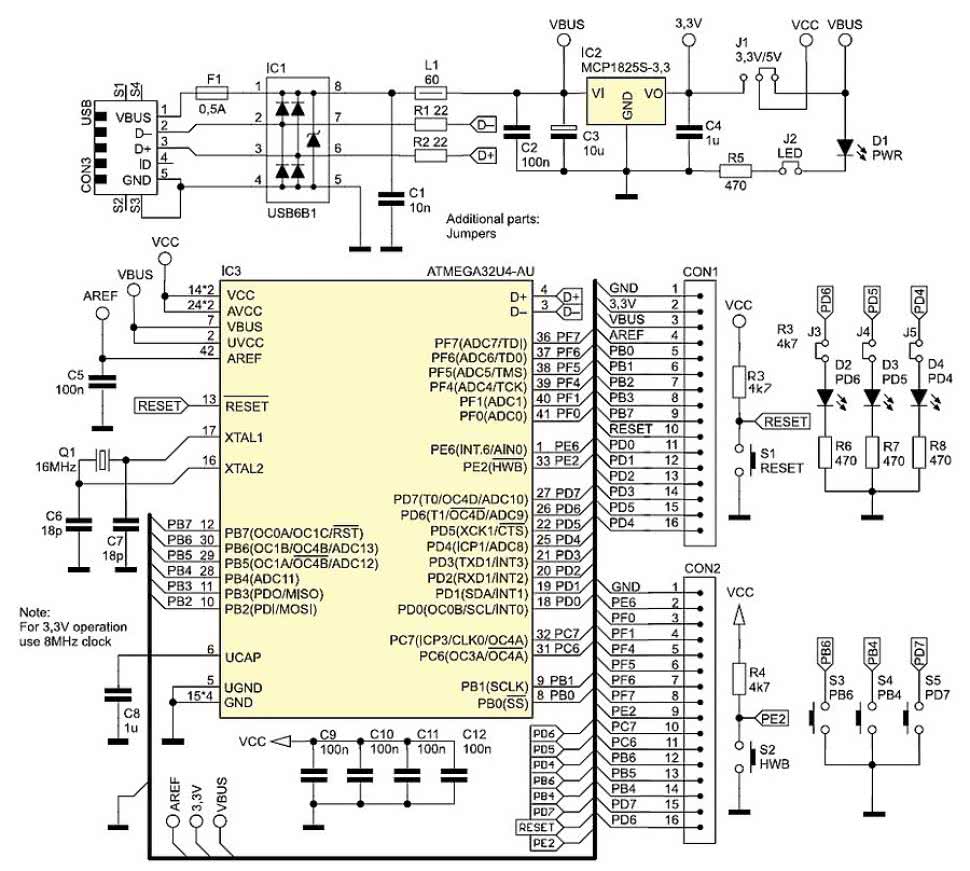
Rysunek 1. Schemat ideowy układu ATmega32U4-DIPMOD
Projektując urządzenie starałem się uczynić go jak najbardziej bezpiecznym i uniwersalnym, pamiętając jednocześnie, że jest głównie przeznaczony do umieszczania na płytce stykowej. Nie do przecenienia jest fakt, że układ może być zasilany i programowany bezpośrednio z portu USB komputera, co w wielu sytuacjach upraszcza i uprzyjemnia pracę.
Na rysunku 1 pokazano schemat ideowy płytki prototypowej. Przyłącza się ją do komputera z wykorzystaniem złącze CON3 typu USB Mini B. Bezpiecznik F1 o wartości 500 mA ma na celu ochronę portu USB komputera w wypadku zwarcia na płytce, gdy jest ona z niego zasilana (500 mA to maksymalna wartość natężenia prądu, którą zgodnie ze standardem można pobierać z portu USB). Wartości rezystancji R1 oraz R2 wzięto z karty katalogowej mikrokontrolera.
Układ IC1 (USB6B1) produkcji STMicroelectronics chroni przed przepięciami mogącymi pojawiać się na linii transmisyjnej. Dzięki wbudowanym diodom zapewnia on ograniczenie wysokich napięć mogących wystąpić na przewodach sygnałowych i zasilających. Poza interfejsem USB, układ nadaje się m.in. do ochrony interfejsu RS-485, a jego podstawową zaletą jest mała ilość miejsca zajmowanego na płytce w porównaniu z rozwiązaniami opartymi o elementy dyskretne.
Kondensatory C1 i C2, C9...C12 i dławik L1 filtrują zaburzenia mogące wystąpić na szynie zasilania. Dławik L1 to tzw. koralik przeciwzakłóceniowy (ferrite bead), którego rolą jest absorbowanie prądu o wysokiej częstotliwości i wydzielanie go w postaci ilości ciepła. Podana na schemacie wartość 60 oznacza, że koralik ma impedancję 60 Ω przy częstotliwości 100 MHz (tę wartość warto zawsze konsultować z dokumentacją danego modelu). Wartości elementów C1, L1, C2 zostały dobrane zgodnie z zaleceniami odszukanymi w dokumentacji firm FTDI [1] oraz Texas Instruments [2].
Płytkę wyposażono w stabilizator napięcia 3,3 V, dzięki któremu jest możliwy wybór napięcia zasilającego mikrokontroler między +3,3 V ze stabilizatora a +5 V pobieranym z USB. Na blok zasilania składają się elementy kondensatory C3 i C4, układ scalony IC2, rezystor R5, dioda D1, złącza J1 i J2. Pojemność kondensatora C3 (10 µF) dobrano zgodnie z zaleceniami dokumentacji mikrokontrolera.
Jeśli miałaby być większa, dla zgodności ze standardem USB niezbędne może okazać się zastosowanie soft startu w projektowanym urządzeniu. Pojemność C4 (1 µF) to minimalna zalecana dla IC2. Układ IC2 (MCP1825) wybrano ze względu na relatywnie mały (maks. 220 µA) pobierany prąd, co może mieć znaczenie przy testowaniu urządzeń USB wykorzystujących tryb czuwania, gdy pobierany prąd nie powinien przekraczać wartości 500 µA.
Biorąc pod uwagę prąd pobierany przez wbudowane w mikrokontroler rezystory podciągające magistralę USB (ok. 200 µA) dla mikrokontrolera pozostaje około 80 µA. Rola zworki J2 wydaje się oczywista - umożliwia ona odłączenie diody D1 (sygnalizującej zasilanie), pobierającej w tym wypadku znaczny prąd.
Wyboru napięcia zasilającego mikrokontroler dokonuje się zworką J1. Układ zasilania mikrokontrolera wymaga kilku słów wyjaśnienia, w czym pomocny będzie rysunek 2 przedstawiający fragment budowy wewnętrznej bloku USB mikrokontrolera ATmega32U4. Zgodnie ze standardem, napięcie zasilające interfejsu USB wynosi około +5 V, zaś napięcie poziomu wysokiego na liniach sygnałowych (D-, D+) wynosi około +3,3 V, dlatego mikrokontroler ma wbudowany stabilizator napięcia +3,3 V, umożliwiający odpowiednie zasilanie linii sygnałowych.
Wejście (UVCC) oraz wyjście (UCAP) tego stabilizatora są dostępne na wyprowadzeniach mikrokontrolera. W prezentowanym urządzeniu, wejście stabilizatora (UVCC) przyłączono na stałe do napięcia VBUS (tj. +5 V z USB), natomiast do wyjścia (UCAP) jest przyłączony jedynie kondensator filtrujący C8. Dzięki takiej konfiguracji, mikrokontroler może generować wymagane poziomy napięć interfejsu USB niezależnie od napięcia zasilającego (VCC).
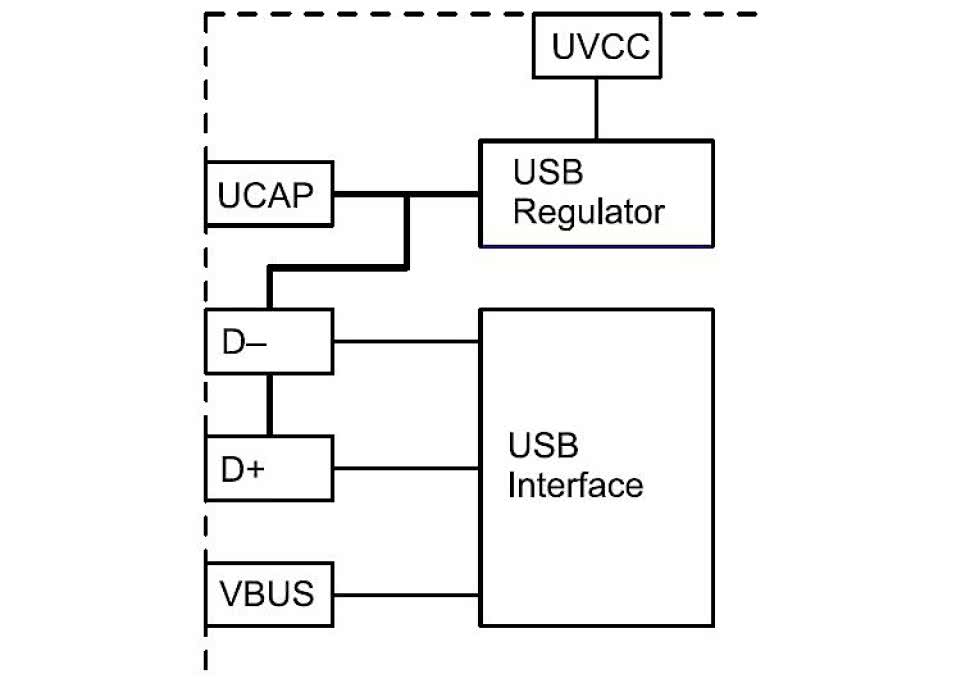
Rysunek 2. Schemat (częściowy) bloku zasilania mikrokontrolera ATmega32U4
Dzięki zworce J1, napięcie VCC mikrokontrolera może zostać ustalone na +5 V z USB lub +3,3 V ze stabilizatora IC2. Warto zaznaczyć, że mikrokontroler może pracować w różnych konfiguracjach zasilania, które omówiono szerzej w nocie katalogowej układu. Widoczne na rys. 2 wyprowadzenie VBUS umożliwia mikrokontrolerowi detekcję przyłączenia do USB.
Rezonator kwarcowy Q1 oraz kondensatory C6 i C7 ustalają częstotliwość taktowanie mikrokontrolera. Częstotliwość Q1 jest krytyczna i powinna wynosić 8 lub 16 MHz, ponieważ tylko te wartości zapewniają poprawną pracę interfejsu USB. Dodatkowo, na maksymalną częstotliwość taktowania ma wpływ napięcie zasilające: dla 3,3 V wynosi ona 8 MHz, dla 5 V może to 16 MHz. W trakcie użytkowania nie stwierdziłem niestabilnej pracy mikrokontrolera dla częstotliwości 16 MHz przy zasilaniu 3,3 V, jednak nie należy tego przyjmować za regułę.
Na płytce znalazło się również miejsce dla mikroprzełączników S1...S5 oraz diod LED D2...D4. Przycisk S1 służy do zerowania mikrokontrolera, zaś S2 do uruchamiania bootloadera (sposób programowania opisano dalej). Przyciski ogólnego przeznaczenia S3...S5, podobnie jak diody D2...D4 mogą być wykorzystane dowolnie.
Zworki J3... J5 pozwalają na odłączenie diod od mikrokontrolera. Linie przycisków S1 i S2 zostały podciągnięte do plusa zasilania za pomocą rezystorów R3 oraz R4, zaś przyciski S3...S5 mogą być podciągnięte za pomocą rezystorów wbudowanych w mikrokontroler.
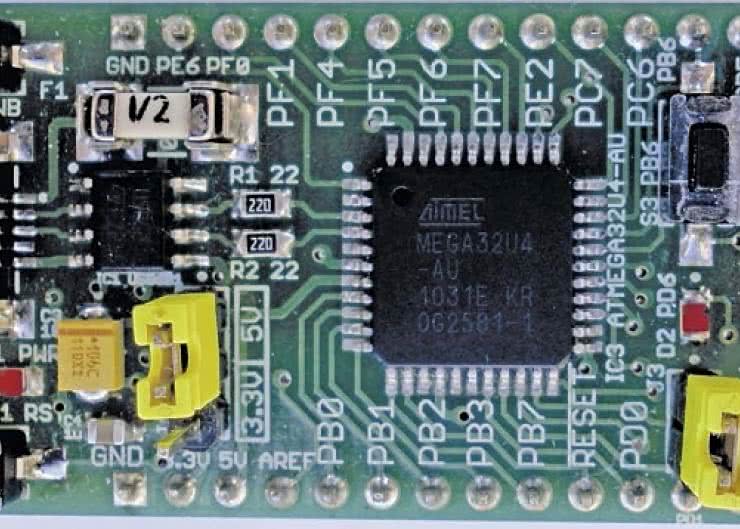
Na złącza CON1 i CON2 (goldpin) wyprowadzono wszystkie porty mikrokontrolera, sygnał RESET, zasilanie oraz wejście napięcia odniesienia przetwornika A/C. Rozstaw złączy na płytce drukowanej wynosi 22,86 mm (9×2,54 mm), co pozwala na jej łatwe umieszczenie w otworach płytki stykowej.
Wykaz elementówRezystory: (SMD 0805) Kondensatory: (SMD 0805) Półprzewodniki: Inne: |
Montaż i uruchomienie

Rysunek 3. Schemat montażowy układu ATmega32U4-DIPMOD
Schemat montażowy pokazano na rysunku 3. Urządzenie składa się głównie z elementów SMD, w związku z tym wymaga nieco wprawy w ich montażu. Na samym początku przestrzegam przed rozpoczęciem montażu od elementów przewlekanych, w tym przypadku złączy CON1, CON2 oraz zworek J1...J5 (należy je montować na końcu). Ponadto, przydatne będą plecionka z topnikiem oraz topnik w pisaku.
Montaż najwygodniej przeprowadzić zaczynając od elementów SMD na stronie górnej. Na tym etapie nie należy montować przycisków S1...S5, bezpiecznika F1, kondensatora C4 oraz złącza USB CON3. Następnie należy przylutować elementy SMD na stronie dolnej. Nieco uwagi wymaga montaż Q1, gdyż jego obudowa zasłania pola lutownicze.
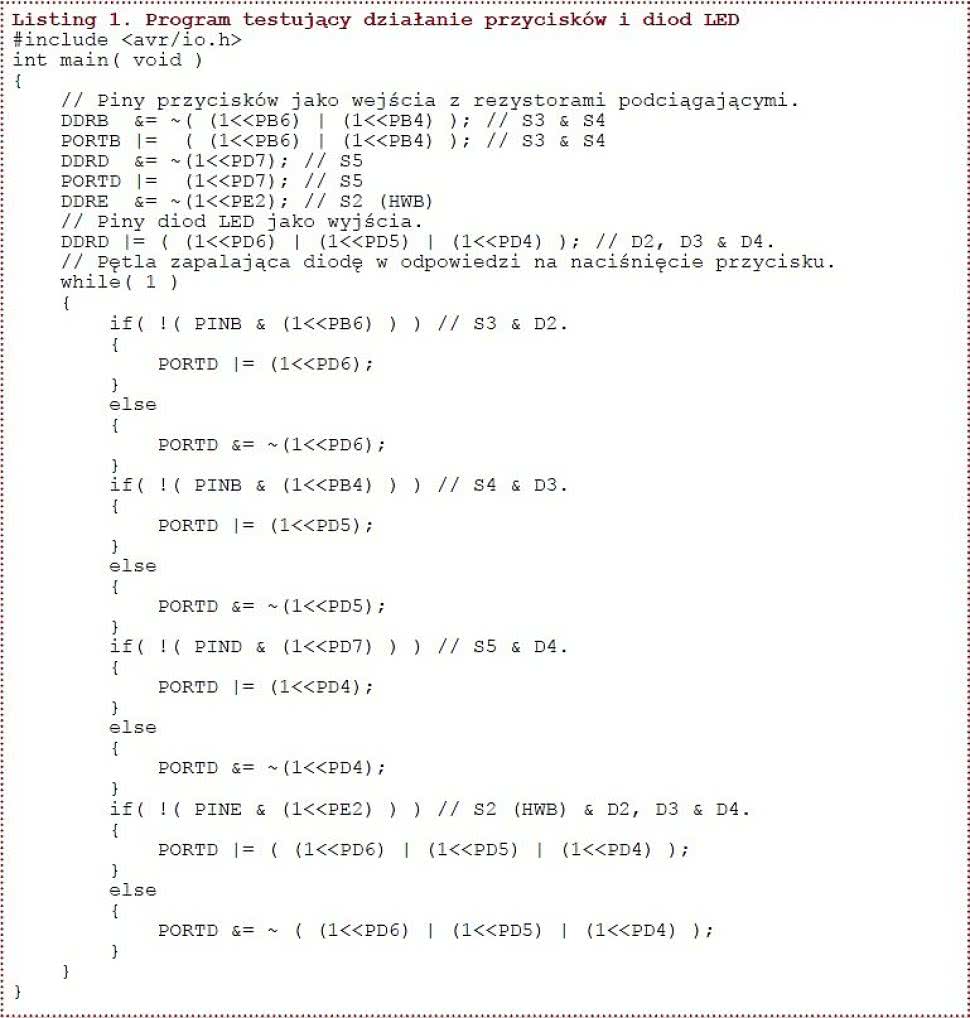
Listing 1. Program testujący działanie przycisków i diod LED
Montując go należy ocynować jedno z pól i przylutować do niego jedno z wyprowadzeń Q1. Następnie zaaplikować sporą ilość topnika i przylutować pozostałe wyprowadzenia. W dalszej kolejności należy przylutować złącze USB, lutując najpierw wyprowadzenia obudowy, a potem pozostałe. Teraz można już przylutować wszystkie pozostałe elementy strony górnej.
Złącza CON1 oraz CON2 należy montować w ten sposób, żeby ich wyprowadzenia znajdowały się od strony dolnej płytki. Na początku należy delikatnie (bez wciskania) umieścić płytkę w płytce stykowej, wyrównać złącza i przylutować po dwa przeciwległe wyprowadzenia. Następnie wyjąć płytkę i solidnie przylutować pozostałe wyprowadzenia. Czynność tę warto wykonać bardzo starannie, co zaoszczędzi późniejszych problemów z umieszczaniem płytki w płytce stykowej oraz wyłamywaniem się wyprowadzeń.
Zmontowany układ należy sprawdzić pod kątem występowania zwarć, szczególnie na szynie zasilania USB. Na listingu 1 zamieszczono program umożliwiający sprawdzenie działania przycisków S2...S5 oraz diod D2...D4. Działanie programu polega na zaświeceniu diody znajdującej się pod przyciskiem w odpowiedzi na jego wciśnięcie. Naciśnięcie przycisku S2 (HWB) powoduje zaświecenie wszystkich diod.
Programowanie

Rysunek 4. Wygląd okna programu FLIP
Mikrokontroler ATmega32U4 został fabrycznie wyposażony w bootloader umożliwiający programowanie z wykorzystaniem USB, bez potrzeby korzystania z zewnętrznego programatora. Bootloader w AVR jest umieszczany na końcu pamięci Flash, w tzw. sekcji bootloadera. Zaraz po starcie, mikrokontroler może uruchomić program wgrany przez użytkownika lub bootloader. To, która aplikacja zostanie uruchomiona (główna czy bootloader) zależy od programu i konfiguracji mikrokontrolera.
W fabrycznie nowym mikrokontrolerze ATmega32U4 bootloader uruchamia się wymuszając odpowiednią sekwencję poziomów logicznych na wejściach RESET i HWB mikrokontrolera, które na płytce przyłączono do przycisków S1 oraz S2. Sekwencja ta wygląda następująco: naciśnięcie S1 (stan niski na wejściu RESET), naciśnięcie S2 (wyzerowane wejście HWB), zwolnienie S1 (ustawione wejście RESET), zwolnienie S2 (ustawione wejście HWB). Po uruchomieniu bootloadera można przejść do programowania układu - w systemie Windows można skorzystać z aplikacji Atmel FLIP, a pod Linuksem z aplikacji dfu-programmer.
W systemie Windows jest niezbędne zainstalowanie sterownika bootloadera. Jeśli FLIP został zainstalowany w domyślnym katalogu, to pliki sterownika znajdują się w katalogu C:Program FilesAtmelFlip 3.4.5usb. Po poprawnym zainstalowaniu sterownika można połączyć się z płytką. W tym celu należy uruchomić program FLIP, z menu Device wybrać opcję Select, wybrać docelowy mikrokontroler tj. ATmega32U4, a następnie z menu Settings wybrać opcję Communication, dalej USB i Open.
Wygląd programu po tych operacjach pokazano na rysunku 4. Aby wgrać własny program do pamięci mikrokontrolera, z menu File należy wybrać opcję Load HEX File i wskazać plik programu w formacie Intel HEX, a następnie nacisnąć przycisk Run. Wgrany program można uruchomić naciskając przycisk Start Application w programie FLIP lub restartując mikrokontroler za pomocą przycisku S1 na płytce. Opisu pozostałych opcji programu FLIP należy szukać w pliku pomocy dostępnym w menu Help.
Programowanie płytki w systemie Linux przy wykorzystaniu programu dfuprogrammer sprowadza się do wydania następujących poleceń:
$ dfu-programmer atmega32u4 erase
$ dfu-programmer atmega32u4 flash plik_programu.hex
Ostatecznie, program mikrokontrolera można uruchomić poleceniem:
$ dfu-programmer atmega32u4 start
Wyjaśnienia dodatkowych opcji programu dfu-programmer należy szukać w jego manualu.
Listing 2. Reguły demona udev pozwalające programować mikrokontroler użytkownikom należącym do grupy plugdev (dotyczy systemu Linux)
W systemie Linux ważną rolę odgrywa posiadanie odpowiednich uprawnień, pozwalających na dostęp do urządzenia USB, w tym przypadku bootloadera prezentowanej płytki, więc pierwsze próby warto przeprowadzić na koncie użytkownika root, aby od razu wykluczyć problemy z uprawnieniami. Dodatkowo, na listingu 2 przedstawiono dwie reguły demona udev, dzięki którym pliki urządzeń tworzone dla bootloadera USB lub programatora AVRISP mkII będą należały do grupy plugdev, umożliwiając bezproblemowy dostęp wszystkim użytkownikom należącym do tej grupy. W przypadku mojej dystrybucji (Slackware 13.37) okazało się niezbędne odmontowanie systemu plików usbfs z katalogu /proc/bus/usb.
Na zakończenie warto zaznaczyć, że bootloader nie umożliwia zmiany fusebitów, ale pozwala na zmianę lockbitów oraz nie umożliwia wymiany siebie samego. Ograniczenia te nie dotyczą programowania z wykorzystaniem standardowego interfejsu ISP, jednak w tym przypadku jest niezbędny zewnętrzny programator.
LUFA
Interfejs USB, w przeciwieństwie do np. RS-232, nie należy do najprostszych w oprogramowaniu. W jego wypadku najwygodniej skorzystać z gotowych bibliotek ułatwiających obsługę. Jedną z chyba najbardziej popularnych bibliotek USB dla mikrokontrolerów AVR jest LUFA (Lightweight USB Framework for AVRs), której podstawy użycia przedstawię korzystając z omawianej płytki.
W przykładach wykorzystano bibliotekę LUFA o oznaczeniu 120219, którą można pobrać spod adresu http://goo.gl/NrWlmv. Wszystkie przykłady były kompilowane oraz testowane w systemie operacyjnym Linux (Slackware) przy wykorzystaniu kompilatora AVR-GCC (w wersji Atmel AVR 8-bit Toolchain 3.4.0 - Linux 32-bit). Należy zaznaczyć, że LUFA została napisana pod kątem kompilatora GCC i z dużym prawdopodobieństwem nie ma prostej możliwości wykorzystania innego.
Podstawy konfiguracji LUFA
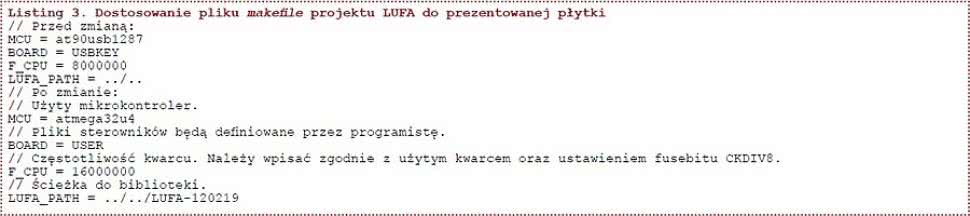
Listing 3. Dostosowanie pliku makefi le projektu LUFA do prezentowanej płytki
Biblioteka została skonstruowana w ten sposób, że możliwe jest szybkie uruchomienie wybranego przykładu tak na własnej płytce, jak i wielu popularnych płytkach rozwojowych (np. AT90USBKEY, XPLAIN). Spośród pokaźnej ilości przykładowych projektów wiele może zostać wykorzystanych praktycznie bez większych zmian w kodzie.
Na potrzeby niniejszego artykułu przyjmijmy, że źródła biblioteki zostały rozpakowane do katalogu ep-avr-usb katalogu domowego, zaś przykładowe projekty będą kopiowane do katalogu projects znajdującego się w katalogu ep-avr-usb. Kopiowanie projektu nie jest konieczne, jednak zapobiega tworzeniu bałaganu w źródłach biblioteki. Układ katalogów będzie następujący:
- ~/ep-avr-usb/LUFA-120219 - oryginalne pliki źródłowe biblioteki,
- ~/ep-avr-usb/projects/przykladowy_ projekt_1 - pierwszy projekt,
- ~/ep-avr-usb/projects/przykladowy_ projekt_2 - drugi projekt.
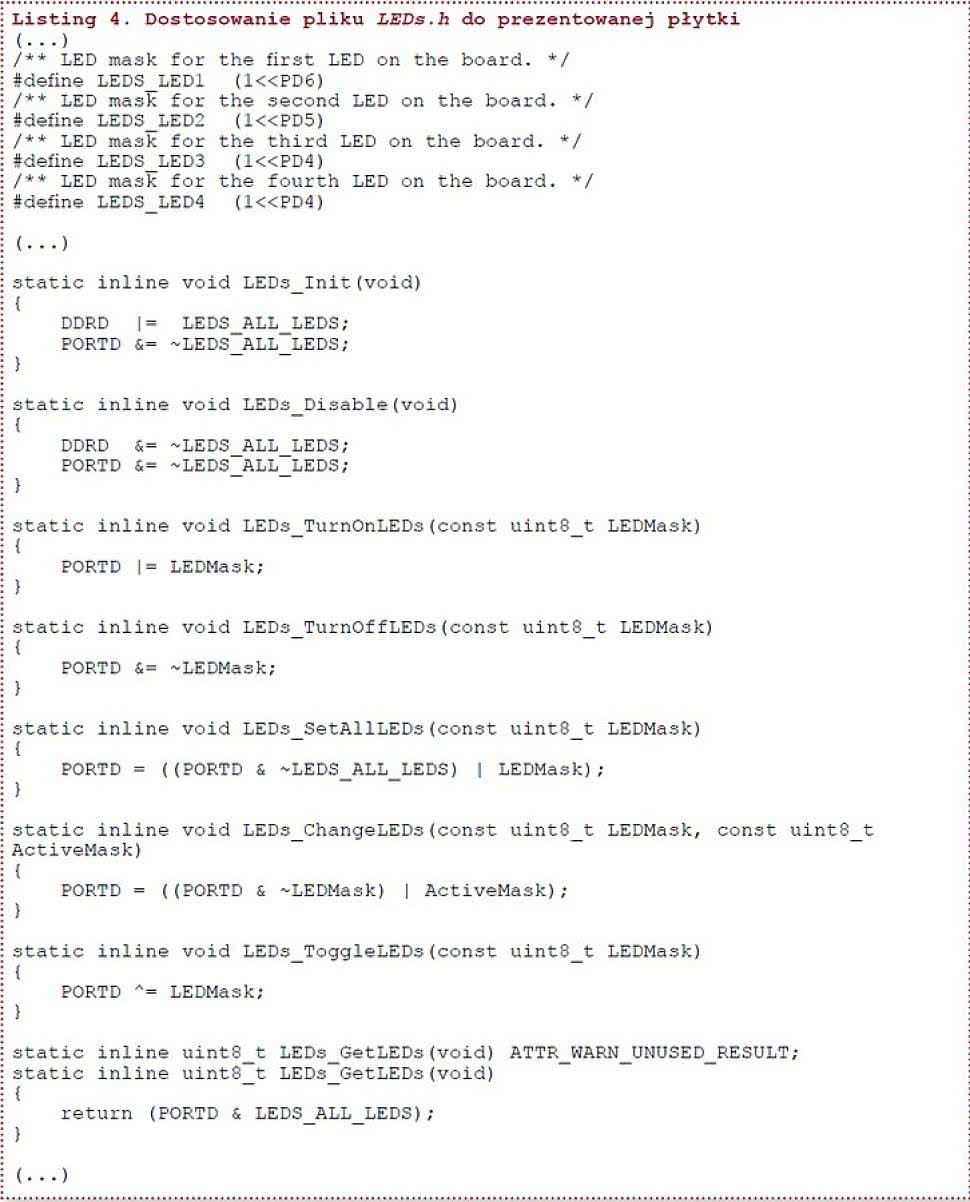
Listing 4. Dostosowanie pliku LEDs.h do prezentowanej płytki
Biblioteka zapewnia spójne API oraz spójną strukturę katalogów, dzięki czemu dostosowanie wybranego przykładu na potrzeby prezentowanej płytki sprowadza się do wykonania kilku prostych czynności. Czynności te są takie same dla wszystkich przedstawionych przykładów i polegają na:
- skopiowaniu wybranego przykładu do katalogu projects,
- dostosowaniu pliku makefile danego przykładu,
- skopiowaniu i uzupełnieniu plików sterowników urządzeń.
Każdy projekt wchodzący w skład biblioteki posiada plik makefile, który należy dostosować do posiadanego sprzętu. Na listingu 3 przedstawiona została część zmian, dostosowujących wybrany projekt do prezentowanej płytki. Celowo napisałem część zmian, gdyż różne przykłady mogą wymagać dodatkowych, drobnych zmian.
Warto wiedzieć, że plik makefile pozwala również na szybkie zaprogramowanie mikrokontrolera, wystarczy jedynie wydać polecenie make dfu lub make flip w katalogu z przykładową aplikacją (oczywiście bootloader mikrokontrolera powinien być wtedy uruchomiony).
Niektóre aplikacje LUFA mogą wymagać przyłączenia do mikrokontrolera np. przycisków bądź diod LED. W celu zapewnienia spójności, biblioteka zawiera szablonowe pliki sterowników tych elementów, które należy skopiować do podkatalogu Board katalogu danego przykładu, a następnie uzupełnić ich zawartość. Szablony sterowników znajdują się w katalogu: ~/ep-avr-usb/LUFA- 120219/LUFA/CodeTemplates/DriverStubs, zaś po skopiowaniu ich ścieżka powinna wyglądać tak:
- ~/ ep-avr-usb/projects/przykladowy_ projekt_1/Board/LEDs.h.
- ~/ep-avr-usb/projects/przykladowy_ projekt_1/Board/Buttons.h.
- itd.
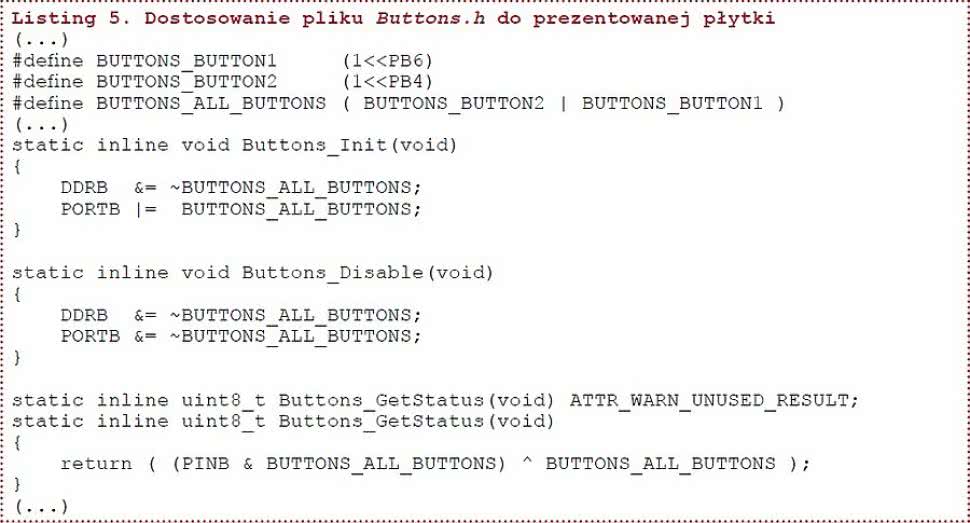
Listing 5. Dostosowanie pliku Buttons.h do prezentowanej płytki
Na listingu 4 pokazano fragment pliku LEDs.h uzupełniony o definicje wymagane dla prezentowanej płytki. Makrom LEDS_LED1...LEDS_LED4 zostały przypisane numery pinów, do których przyłączone są poszczególne diody. Ponieważ na płytce mamy do dyspozycji trzy diody LED, a plik wymaga podania czterech, programowym diodom 3 i 4 odpowiada jedna fizyczna dioda D4. Aby wszystkie diody działały prawidłowo, powinny być przyłączone do jednego portu mikrokontrolera.
Funkcje odpowiedzialne za obsługę diod (LEDs_*) uzupełnione zostały na podstawie pliku ~/ep-avr-usb/LUFA-120219/LUFA/ Drivers/Board/AVR8/USBKEY/LEDs.h. Jeżeli nie potrzebujemy sygnalizacji wykorzystującej LED-y, makrom LEDS_LED1..LEDS_LED4 możemy przypisać wartość 0, a ciała funkcji pozostawić puste (jedynie w funkcji LEDs_ GetLEDs() należy zwrócić wartość 0, aby uniknąć ostrzeżeń o braku zwracania wartości w czasie kompilacji).
Na listingu 5 przedstawiono fragment pliku Buttons.h, uzupełniony o definicje wymagane dla prezentowanej płytki. Makrom BUTTONS_BUTTON1 oraz BUTTONS_ BUTTON2 przypisane zostały numery pinów, do których przyłączone są odpowiednio przyciski S3 oraz S4. Funkcje odpowiedzialne za obsługę przycisków (Buttons_*) uzupełnione zostały na podstawie pliku ~/ep-avr-usb/LUFA-120219/LUFA/Drivers/Board/AVR8/ USBKEY/Buttons.h.
W przypadku dwóch lub więcej przycisków, powinny one być przyłączone do jednego portu mikrokontrolera (stąd brak uwzględnienia przycisku S5, przyłączonego do portu D). Alternatywnie, należałoby napisać własną obsługę, uwzględniającą np. likwidację drgań styków.
W dalszej części artykułu przedstawione zostaną przykłady wykorzystania opisywanej płytki w połączeniu z biblioteką LUFA. W celu kompilacji danego projektu należy wydać polecenie make. I tu jedna uwaga - jeśli wcześniej kompilowaliśmy jakiś inny projekt, warto przed poleceniem make wydać polecenie make clean, które "oczyści" bibliotekę z plików obiektowych poprzedniego projektu. Niestosowanie się do tej reguły może powodować dziwne i ciężkie do usunięcia błędy kompilacji.
Bootloader
Listing 6. Przykład kodu uruchamiającego bootloader
Wcześniej wspomniałem, że mikrokontroler ATmega32U4 ma preinstalowany bootloader umożliwiający wgranie własnego programu. Problem w tym, że nie mając dostępu do kodu źródłowego tego bootloadera, jesteśmy skazani na konfigurację producenta (np. dotyczącą sposobu uruchamiania). Wyjściem z tej sytuacji może być wykorzystanie któregoś z bootloaderów dostępnych w bibliotece LUFA.
Do wyboru mamy trzy wersje bootloadera: HID, CDC oraz DFU. Wersja HID korzysta z klasy USB HID, tj. urządzenia interfejsu człowiek - komputer, co oznacza, że system operacyjny posiada wbudowany sterownik do jego obsługi (ten sam, który jest używany np. dla klawiatury czy myszy). W bibliotece, wraz z bootloaderem jest dostarczana aplikacja do jego obsługi (hid_bootloader_cli).
Wersja CDC korzysta z klasy USB CDC, tj. urządzenia przeznaczonego do komunikacji i jest widziana w systemie jako wirtualny port szeregowy. Podobnie jak w przypadku bootloadera HID, sterowniki dla bootloadera CDC są wbudowane w system operacyjny. Bootloader ten korzysta z protokołu AVR109, zaś programowanie możliwe jest m.in. za pomocą aplikacji avrdude.
Ostatni bootloader, to jest w wersji DFU, korzysta z klasy USB DFU, przeznaczonej dla urządzeń wspierających aktualizację firmware. Co ważne, jest zgodny z fabrycznym bootloaderem Atmela, w związku z tym programowanie odbywa się w identyczny sposób (opisany w sekcji Programowanie), przy wykorzystaniu programów FLIP lub dfu-programmer. Temu bootloaderowi przyjrzymy się bliżej.

Listing 7. Dodatkowe zmiany w pliku makefile przykładu programatora AVRISP mkII
Pracę rozpoczynamy od skopiowania katalogu ~/ep-avr-usb/LUFA-120219/Bootloaders/ DFU do katalogu ~/ep-avr-usb/projects/DFU. Następnie w katalogu DFU tworzymy katalogBoard i kopiujemy do niego plik ~/ ep- -avr-usb/LUFA-120219/LUFA/CodeTemplates/ DriverStubs /LEDs.h. Plik LEDs.h uzupełniamy zgodnie z list. 4. W przypadku tego przykładu nie jest wymagany plik Buttons.h.
Plik makefile projektu modyfikujemy zgodnie z list. 3, dodatkowo zmieniając definicję FLASH_SIZE_ KB = 128 na FLASH_SIZE_KB = 32 (określa ona wielkość pamięci Flash użytego mikrokontrolera). W pliku BootloaderDFU.h makru SECURE_MODE można przypisać wartość true, co spowoduje, że jedyną możliwą operacją na pamięci po uruchomieniu bootloadera będzie jej skasowanie (w szczególności, przed skasowaniem, niemożliwe będzie jej odczytanie). Zabieg ten (wraz z odpowiednim ustawieniem lockbitów) ma na celu uniemożliwienie skopiowania zawartości pamięci osobom postronnym.
Ostatnia modyfikacja dotyczy sposobu uruchamiania bootloadera (opisany zostanie sposób wykorzystujący przycisk, ale może to być dowolny inny, wymyślony przez programistę). Założenie jest takie, że bootloader będzie uruchamiany w taki sam sposób jak fabryczny bootloader, czyli poprzez odpowiednią sekwencję naciskania przycisków S1 (RESET) oraz S2 (HWB).
Zmiany wprowadzimy w głównym pliku aplikacji, tj. BootloaderDFU.c. To, czy bootloader zostanie uruchomiony, zależy od wartości zmiennej RunBootloader, której początkowa wartość wynosi true. Na listingu 6 przedstawiony został kod odpowiedzialny za sprawdzenie stanu przycisku S2 oraz odpowiednie ustawienie zmiennej RunBootloader. Kod ten należy umieścić w pliku BootloaderDFU.c na początku funkcji main(), przed wywołaniem funkcji SetupHardware(). Po skompilowaniu projektu, płytkę należy zaprogramować plikiem BootloaderDFU.hex, zaś sam bootloader uruchomić zgodnie z opisem w sekcji Programowanie.
W celu wymiany bootloadera niezbędny jest osobny programator, gdyż bootloadery najczęściej nie wspierają wymiany siebie samego. Ja użyłem drugiej płytki ATmega32U4-DIPMOD z aplikacją AVRISP mkII, której uruchomienie i wykorzystanie zostało opisane w następnej sekcji.
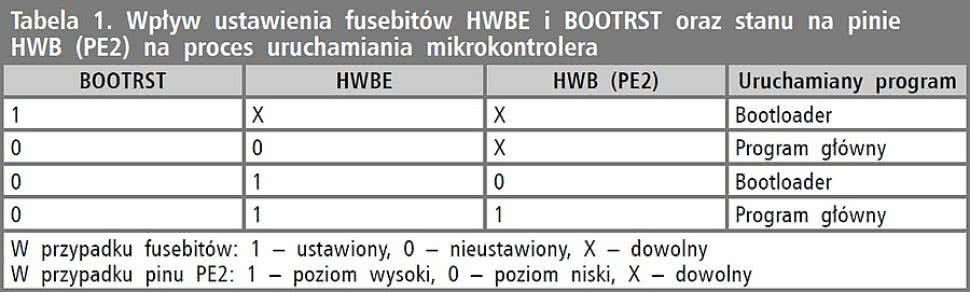
Tabela 1. Wpływ ustawienia fusebitów HWBE i BOOTRST oraz stanu na pinie HWB (PE2) na proces uruchamiania mikrokontrolera
W czasie aktualizacji bootloadera warto zwrócić uwagę na odpowiednie ustawienie fusebitów mikrokontrolera, w szczególności HWBE, BOOTRST oraz CKDIV8. W tabeli 1 przedstawiony został sposób uruchamiania mikrokontrolera w zależności od ustawienia bitów HWBE i BOOTRST oraz stanu panującego na pinie HWB (PE2). Uważam, że bootloader powinien być uruchamiany jako pierwszy (BOOTRST ustawiony) i decydować czy skoczyć do programu głównego, czy przejść do trybu programowania.
Tym sposobem, programowanie będzie możliwe nawet w przypadku uszkodzenia programu głównego. Bit CKDIV8 (domyślnie włączony) odpowiedzialny jest za wewnętrzny podział częstotliwości taktującej przez 8, tzn. jeśli zastosujemy kwarc 8 MHz to rdzeń (i nie tylko) będzie taktowany częstotliwością 1 MHz. Należy mieć to na uwadze przy ustalaniu wartości F_CPU w pliku makefile (poza fusebitem CKDIV8, istnieje również możliwość programowego wyłączenia tego podziału za pomocą funkcji clock_prescale_set() - funkcjonalność ta jest często wykorzystywana w bibliotece LUFA, o czym też należy pamiętać). Bit ten nie ma wpływu na działanie interfejsu USB, gdyż ten korzysta z PLL i jest taktowany osobno (jakkolwiek z tego samego kwarcu).
Programator AVRISP mkII
Listing 8. Zmiana w pliku V2Protocol.c przykładu programatora mkII
Można się kłócić, czy warto robić własny programator, czy lepiej kupić gotowy. Zwolenników pierwszej opcji zachęcam do dalszej lektury, zaś zwolenników drugiej... również, gdyż czasem może się zdarzyć, że uszkodzimy jedyny programator, jakim dysponujemy, a wtedy będziemy w stanie szybko zrobić coś swojego.
Biblioteka LUFA zawiera projekt programatora AVRISP mkII, będącego w znacznym stopniu kompatybilnym, jeśli chodzi o firmware, bo sprzęt jest o wiele uboższy, z programatorem Atmela o tej samej nazwie. Programator obsługuje trzy interfejsy programowania, tj. ISP (np. ATmega), PDI (np. ATxmega) oraz TPI (np. ATtiny o małej liczbie wyprowadzeń) oraz może być obsługiwany z poziomu AVRStudio lub avrdude.
W przeciwieństwie do programatora Atmela, programator z biblioteki LUFA wymaga trzech osobnych wtyków do każdego z wymienionych interfejsów programowania. Po szczegółowe informacje odsyłam do dokumentacji LUFA, zaś poniżej opiszę jak dostosować programator do prezentowanej płytki i wykonać przykładowe połączenia interfejsu ISP.
Pliki źródłowe programatora znajdują się w katalogu ~/ep-avr-usb/LUFA-120219/ Projects/ AVRISP-MKII i należy je skopiować do katalogu ~/ep-avr-usb/projects/ AVRISP-MKII. Następnie w katalogu AVRISP-MKII tworzymy katalog Board i kopiujemy do niego plik ~/ ep-avr-usb/LUFA-120219/LUFA/CodeTemplates/ DriverStubs /LEDs.h, który należy uzupełnić zgodnie z listingiem 4. W przypadku tego przykładu nie jest wymagany plik Buttons.h. Plik makefile projektu modyfikujemy zgodnie z listingiem 3 oraz listingiem 7. Znaczenie wybranych opcji konfiguracyjnych jest następujące:
- AUX_LINE_* (PORT, PIN, DDR, MASK) - określenie pinu odpowiedzialnego za obsługę linii RESET programowanego mikrokontrolera. Pin ten warto wybrać na końcu, aby nie kolidował z pozostałymi pinami interfejsu programowania (nie może to być również pin SS modułu SPI mikrokontrolera)
- NO_VTARGET_DETECT - wyłączenie pomiaru napięcia w układzie programowanym. Programator posiada opcję pomiaru tego napięcia, z której nie będziemy korzystać w prezentowanym przykładzie
- LIBUSB_DRIVER_COMPAT - włączenie trybu kompatybilności z libusb, z którego korzysta m.in. avrdude. Niestety, jednocześnie tracona jest kompatybilność z AVRStudio. Jakkolwiek, nie stwierdziłem błędnego działania avrdude (wersja 5.11.1, Linux) przy braku ustawienia tej opcji

Rysunek 5. Schemat połączeń interfejsu ISP
Ze względu na błąd w pliku Lib/V2Protocol.c, niezbędne jest jego poprawienie zgodnie z listingiem 8 (dotyczy wersji LUFA-120219 i prawdopodobnie wcześniejszych).
Zwracam uwagę na fakt, że interfejs programowania ISP korzysta z modułu SPI mikrokontrolera, zaś interfejsy PDI oraz TPI korzystają z USART-u mikrokontrolera, co wiąże się z koniecznością wykonania połączeń w odpowiedni sposób. Na rysunku 5 pokazano schemat połączeń w przypadku programowania mikrokontrolerów z serii ATmega za pomocą interfejsu SPI.
Należy pamiętać o zachowaniu kompatybilności poziomów logicznych między płytką, a układem programowanym (tj. oba układy powinny być zasilane napięciem 5 V lub 3,3 V). Bardziej rozbudowane wersje interfejsu programującego, zawierające między innymi konwerter poziomów oraz interfejsy PDI oraz TPI, można znaleźć w Internecie pod hasłem "mkII clone" (na Elportalu można znaleźć projekt o nazwie "Programator USBTiny MKII PL".
Na pinie OC1A (PB5) mikrokontrolera jest generowany sygnał o częstotliwości 4 MHz, który można wykorzystać w celu odblokowania mikrokontrolera AVR zablokowanego nieprawidłowym ustawieniem fusebitów. Sygnał ten należy doprowadzić do pinu XTAL1 odblokowywanego mikrokontrolera, zaś częstotliwość interfejsu ISP powinna być ustawiona na 125 kHz.
Po skompilowaniu przykładu, płytkę należy zaprogramować plikiem AVRISP-MKII.hex (w tym celu można skorzystać z bootloadera i polecenia make dfu). Po przyłączeniu do komputera, płytka będzie widziana jako programator AVRISP mkII. W systemie Windows należy zainstalować sterownik dostępny w AVRStudio, w przypadku Linuksa, programator powinien być od razu gotowy do użycia.
Joystick USB
Listing 9. Definicje obsługi przetwornika A/C dla przykładu joysticka
Joystick to przykład urządzenia wykorzystującego klasę HID USB, czyli urządzenia stanowiącego interfejs między człowiekiem a komputerem. Oryginalny przykład joysticka z biblioteki LUFA w celu aktualizacji współrzędnych XY wykorzystuje joystick oparty o styki, co uniemożliwia ich płynną zmianę (możliwe są tylko skrajne położenia). Poniżej pokażę jak zmodyfi kować przykład, aby korzystał z przetwornika A/C wbudowanego w mikrokontroler, zaś zmiana współrzędnych odbywała się za pomocą dwóch potencjometrów o rezystancji 10 kV.
Podobnie jak poprzednio, pracę należy rozpocząć od skopiowania przykładu, który znajduje się w katalogu ~/ep-avr-usb/LUFA- 120219/Demos/Device/ClassDriver/Joystick, następnie należy utworzyć katalog sterowników Board i skopiować do niego pliki LEDs.h oraz tym razem Buttons.h, oba uzupełniając zgodnie z list. 4 oraz 5.
Dodatkowo należy utworzyć plik Joystick.h o treści jak na listingu 9. Gdybyśmy chcieli uruchomić oryginalny przykład, plik ten pochodziłby z katalogu DriverStubs i odpowiadałby za joystick oparty o styki. W naszym przypadku, w pliku tym określiliśmy kanały przetwornika A/C, do których będą przyłączone potencjometry osi X i Y oraz ile próbek z danego kanału należy pobrać przed właściwą aktualizacją współrzędnych (zabieg ten ma na celu eliminację zakłóceń mogących pojawiać się na wejściu przetwornika A/C). Plik makefile projektu modyfikujemy zgodnie z listingiem 3, poza tym nie wymaga on dodatkowych zmian.
W prezentowanym przykładzie zadowolimy się 8-bitową rozdzielczością przetwornika, która jest również wystarczająca dla wielu zastosowań praktycznych. O minimalnej oraz maksymalnej wartości wychylenia joysticka należy poinformować komputer, co zrobi za nas biblioteka. Wartości te podajemy w pliku Descriptors.c w linii 56.
Omawiany przykład operuje na współrzędnych X i Y, które są typu int8_t (istnieje możliwość zmiany tego typu), czyli o zakresie wartości -128 - +127, zaś zakres wartości przetwornika A/C to 0...255 (uint8_t), więc w programie niezbędne będzie dokonanie prostego przekształcenia zakresu wartości typu uint8_t na int8_t. Linia 56 będzie wyglądała następująco: HID_DESCRIPTOR_JOYSTICK(2, -128, 127, -1, 1, 2).
Listing 10. Definicja zmiennych zawierających aktualne położenie joysticka
Teraz pozostaje już tylko dodać obsługę i odczyt przetwornika A/C w głównym pliku aplikacji (Joystick.c). Po pierwsze, dyrektywą #include <LUFA/Drivers/Peripheral/ADC.h> dołączamy funkcje obsługi przetwornika, następnie w miejscu przed wywołaniem funkcji main() dodajemy dwie zmienne globalne, które będą zawierały aktualne położenie potencjometrów joysticka (listing 10). W funkcji SetupHardware() zamiast funkcji Joystick_Init() należy wstawić wywołanie funkcji ADC_Init( ADC_SINGLE_ CONVERSION | ADC_PRESCALE_128 ), które skonfiguruje przetwornik do pracy w trybie pojedynczej konwersji, przy częstotliwości taktowania równej F_CPU / 128.
W funkcji main() dodajemy właściwy odczyt wartości z przetwornika. Biblioteka udostępnia kilka różnych funkcji, przy czym prezentowany przykład korzysta z następujących:
- ADC_SetupChannel() - wybór kanału pomiarowego,
- ADC_GetChannelReading() - wykonanie i odczyt pomiaru z oczekiwaniem na zakończenie konwersji.
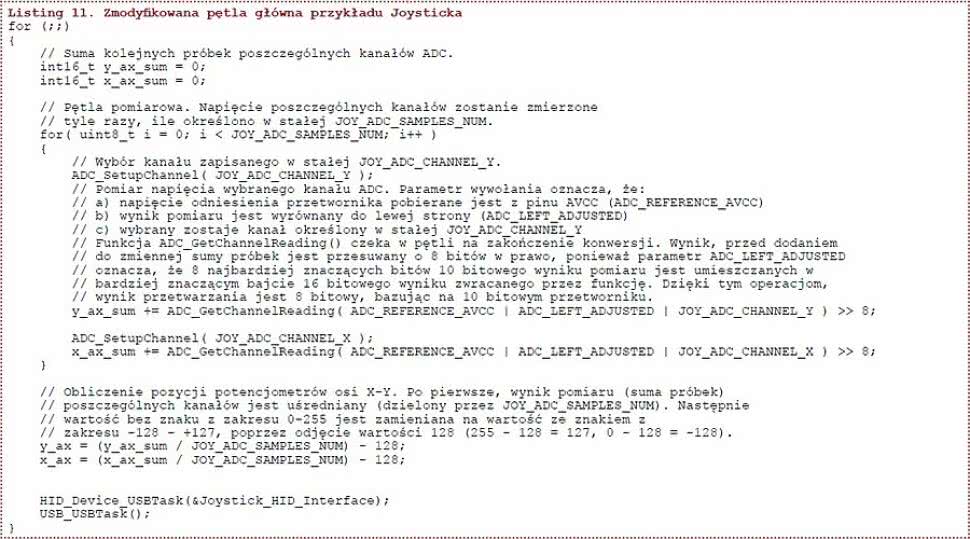
Listing 11. Zmodyfikowana pętla główna przykładu Joysticka
Dokładny opis parametrów wywołania funkcji przetwornika A/C można znaleźć w dokumentacji biblioteki, zaś opis parametrów użytych w przykładzie znajduje się w komentarzach. Na listingu 11 pokazano zmodyfikowaną wersję pętli głównej programu Joysticka, uzupełniona o odczyt przetwornika. Jak wcześniej wspomniałem, w celu likwidacji zakłóceń mogących pojawiać się na wejściu przetwornika, wartość napięcia z potencjometru joysticka jest mierzona kilkukrotnie w pętli for, kolejne odczyty są sumowane, a następnie uśredniane poprzez dzielenie.
Na sam koniec, od średniej wartości odczytu odejmowana jest wartość 128, dzięki czemu liczba bez znak o zakresie wartości 0 - 255 (uint8_t) zostaje zamieniona na liczbę ze znakiem o zakresie wartości -128 - +127 (int8_t). Zwracam uwagę na fakt, że możliwe jest bezpośrednie wykorzystanie 10-bitowego wyniku pomiaru przetwornika A/C z zakresu 0 - 1023 (bez znaku), bez konieczności jego zamiany na liczbę ze znakiem.
W przedstawionym przykładzie zrezygnowałem jednak z takiego rozwiązania, gdyż zmienne wyniku pomiaru są współdzielone między pętlą główną a przerwaniem, a jak wiadomo, w przypadku 8-bitowego mikrokontrolera oraz zmiennych większych niż jeden bajt, sytuacja taka może prowadzić do złej interpretacji wartości zmiennej, jeśli się odpowiednio nie zabezpieczymy.
Zmienne położenia (x_ax oraz y_ax) są aktualizowane w pętli głównej wartością z przetwornika A/C, zaś ich odczyt następuje w funkcji CALLBACK_ HID_Device_CreateHIDReport() ( listing 12), która może być wywoływana w kontekście przerwania, a jej zadaniem jest przygotowanie informacji o stanie joysticka w celu wysłania do komputera.
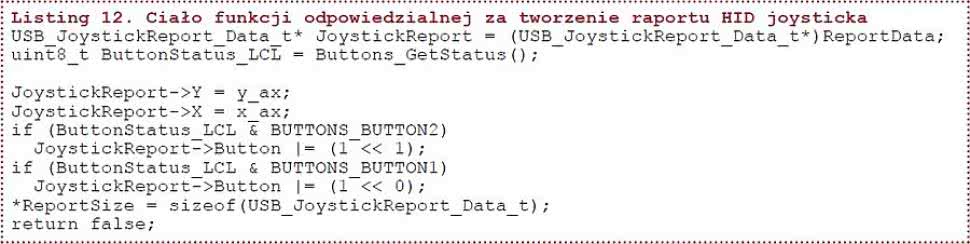
Listing 12. Ciało funkcji odpowiedzialnej za tworzenie raportu HID joysticka
Ciało funkcji z list. 12 różni się od wersji oryginalnej tym, że kod odpowiedzialny za odczyt stanu joysticka bazującego na stykach zastąpiony został kodem aktualizującym współrzędne na podstawie położenia potencjometrów (tj. wartości zmiennych globalnych y_ax oraz x_ax). Nieznacznie zmieniony został również kod odczytu stanu drugiego przycisku (w celu odzwierciedlenia połączeń na płytce).
Schemat przyłączenia potencjometrów osi X i Y do płytki przedstawiony został na rysunku 6. Uwaga! W tym przypadku, zworka J1 ustalająca napięcie pracy mikrokontrolera musi być ustawiona w pozycji 5 V (VBUS), gdyż przy połączeniu zgodnie z rysunkiem 6, takie jest napięcie odniesienia potencjometrów i takie też powinno być napięcie odniesienia przetwornika A/C.
Po wgrania programu (Joystick.hex), płytka będzie widziana w systemie operacyjnym jako dwuosiowy joystick, mający dwa przyciski.
Podsumowanie
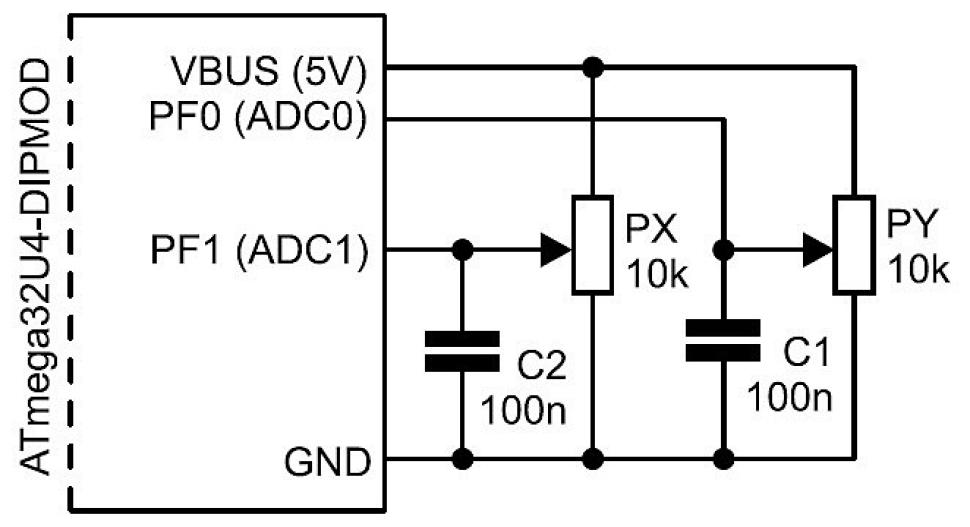
Rysunek 6. Sposób dołączenia potencjometrów w aplikacji joysticka
Dzięki pokaźnej liczbie przykładowych aplikacji, biblioteka LUFA pozwala na szybkie i łatwe rozpoczęcie przygody z mikrokontrolerami AVR z interfejsem USB. W połączeniu z prezentowaną płytką, ich uruchomienie nie zajmie więcej niż kilkanaście - kilkadziesiąt minut.
W artykule nie poruszyłem problemu tworzenia własnej aplikacji korzystającej z biblioteki LUFA od podstaw. W tym celu niezbędna jest szersza wiedza, tak o standardzie USB jak i strukturze samej biblioteki. Jakkolwiek, przedstawione przykłady dają ogólny zarys zagadnienia i myślę, że przy odrobinie wysiłku czytelnicy będą w stanie sami osiągnąć zamierzone cele, np. przerobić aplikację demonstracyjną wirtualnego portu szeregowego (~/ep-avr-usb/LUFA-120219/ Demos/Device/ClassDriver/VirtualSerial) na kartę przekaźników sterowaną z terminala. A może to być dopiero początek fascynującej wyprawy w świat interfejsu USB.
Na zakończenie jeszcze raz zachęcam do przejrzenie przykładów oraz dokumentacji projektu LUFA. W większości przypadków do ich uruchomienia wymagane będą jedynie modyfikacje przedstawione w artykule, ewentualnie garść dodatkowych elementów umieszczonych na płytce stykowej. Zmodyfikowane wersje źródeł prezentowanych przykładów można znaleźć w materiałach dodatkowych, dołączonych do artykułu.
W czasie przekazywanie tego materiału do redakcji, dostępna była już nowsza wersja projektu LUFA. Jednak w trakcie stawiania pierwszych kroków, zalecam korzystanie z wersji opisanej w artykule, w celu uniknięcia przykrych niespodzianek spowodowanych wprowadzonymi zmianami.
Andrzej Telszewski
atelszewski@gmail.com
Bibliografia:
1. AN146 - USB Hardware Design Guidelines for FTDI ICs, FTDI
2. SPRAAR7 - USB 2.0 Board Design and Layout Guidelines, Texas Instruments












