 Zaloguj
Zaloguj



Parametry modułu
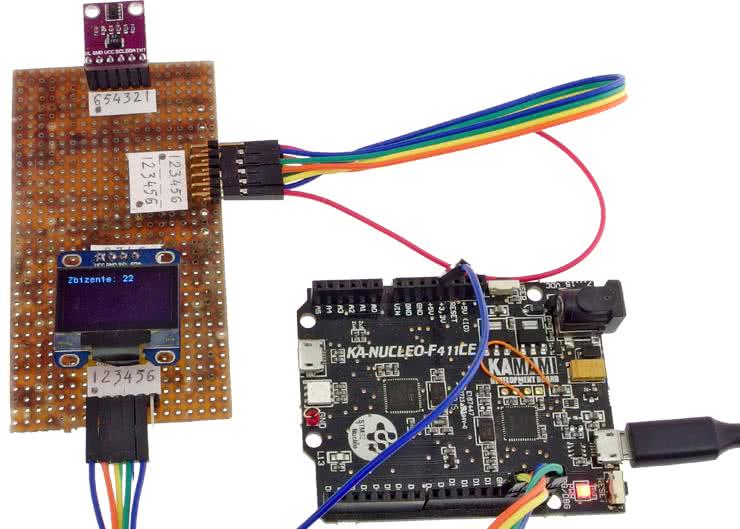
Widok płytki modułu został pokazany na fotografii 1.

Główne parametry zamontowanego na module czujnika są następujące:
- wykrywanie natężenia oświetlenia (funkcja ALS) już od poziomu 0,01 luxa,
- wykrywanie obecności obiektu na dystansie od 0 do około 10 cm przy pomocy impulsów IR,
- komunikacja za pośrednictwem magistrali I2C o szybkości transmisji do 400 kHz,
- wyjście sygnalizujące przerwanie wywoływane poziomem oświetlenia albo wykryciem obiektu,
- rozdzielone zasilanie czujnika 2,2…3,6 V/250 mA od zintegrowanej we wspólnej obudowie diody IR 3…4,5 V/100 mA generującej impulsy używane do wykrycia obiektu,
- fabrycznie skalibrowana detekcja dystansu,
- wewnętrzny regulator prądu diody IR o programowalnej wydajności.
Funkcje wyprowadzeń modułu:
- VL – podłączenie zewnętrznego zasilania diody IR czujnika. Nie ma potrzeby stosowania dodatkowego opornika ograniczającego prąd diody,
- VCC, GND – podłączenie zasilania czujnika,
- SCL, SDA – linie magistrali sterującej I2C,
- INT – wyjście sygnału przerwania.
Budowa czujnika
Na rysunku 1 pokazano schemat blokowy czujnika APDS9930. W części odbiorczej pracują dwie fotodiody CH0 i CH1. Pierwsza z nich jest czuła na światło w szerokim zakresie od promieniowania widzialnego do podczerwieni, druga jest ograniczona do zakresu IR. Dzięki temu przy pomiarze natężenia oświetlenia można wyeliminować wpływ składowej podczerwonej i uzyskać charakterystykę czułości zbliżoną do tej jaką ma oko człowieka. Diody są podłączone zarówno do bloku pomiaru natężenia oświetlenia ALS (ambient light sensing) jak i do bloku detekcji zbliżenia (Proxy Detect).
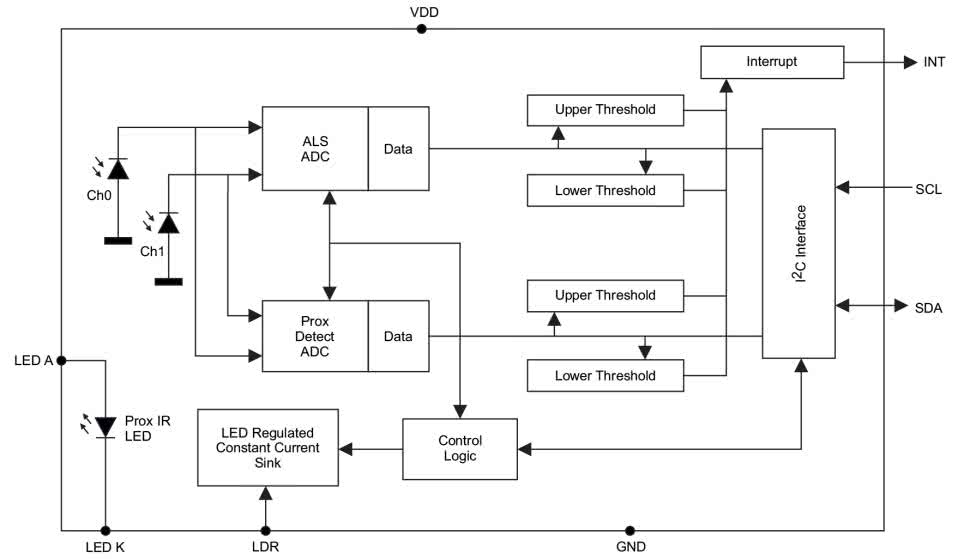
Detekcja działa na zasadzie odbicia impulsów promieniowania podczerwonego od zbliżającego się obiektu. Krótkie impulsy emituje umieszczona wewnątrz obudowy czujnika dioda Prox IR LED. Prąd diody i intensywność impulsów ustala regulator, którego wyprowadzenie LDR jest zewnętrznie łączone z wyprowadzeniem LED K diody. Do anody LED A podłącza się zewnętrzne napięcie zasilania, które może być oddzielone od zasilania pozostałych bloków czujnika.
O tym, który blok jest aktywny: pomiar oświetlenia czy detekcja zbliżania, decyduje użytkownik przez ustawienia rejestrów sterujących czujnika. Użytkownik może włączyć przerwanie podłączone do wyprowadzenia INT. A także ustawić progi jego zadziałania zarówno dla pomiaru oświetlenia jak i detekcji zbliżania.
Dostęp do rejestrów czujnika i wymiana danych odbywa się za pośrednictwem magistrali I2C. Czujnik APDS9930 reaguje na adres 0x39 (konwencja 7 bitowego adresu). W trybie zapisu dostęp do rejestru następuje po wysłaniu adresu (Slave Address) i numeru rejestru (Command Code). W trybie odczytu należy wysłać adres, numer rejestru, sekwencję I2C Start i ponownie adres (dodatkowy bit kierunku powinien być ustawiony) – czujnik prześle wtedy zawartość rejestru.
Biblioteka
Istnieją biblioteki do obsługi czujnika APDS9930. Pod internetowym adresem https://github.com/Depau/APDS9930 udostępniona jest biblioteka dla Arduino wraz z kilkoma przykładami zastosowania, a także opisem sposobu podłączenia modułu do płytki Arduino.
Na bibliotekę składa się szereg metod pozwalających kontrolować działanie czujnika APDS9930 w różnych trybach pracy:
- Procedura init() ustawia czujnik do pracy z wartościami domyślnymi zapisanymi w pliku nagłówkowym APDS9930.h w sekcji Default values.
- Procedura enableLightSensor(bool interrupts) włącza pomiar natężenia oświetlenia z uruchomionym (true) lub nie (false) trybem przerwania.
- Procedura enableProximitySensor(bool interrupts) włącza tryb detekcji zbliżenia obiektu, który może być dodatkowo sygnalizowany sygnałem przerwania.
- Do odczytu pomiaru natężenia oświetlenia w luksach służy procedura readAmbientLightLux(float &val). Z kolei procedura readProximity(uint16_t &val) pozwala odczytać wartość liczbową proporcjonalną do bliskości obiektu gdy czujnik pracuje w trybie detekcji zbliżenia. Wartość 0 oznacza brak detekcji, wartość 1023 maksymalne zbliżenie.
Istnieją także procedury dostępu do określonych rejestrów w tym rejestrów określających progi zadziałania wyjścia przerwania:
- setProximityIntLowThreshold(uint16_t threshold),
- setProximityIntHighThreshold(uint16_t threshold),
- setLightIntLowThreshold(uint16_t threshold),
- setLightIntHighThreshold(uint16_t threshold).
Na listingu 1 został pokazany uproszczony przykład programu, kiedy czujnik pracuje w trybie wykrywania zbliżenia obiektu.
#include <APDS9930.h>
APDS9930 apds = APDS9930();
uint16_t proximity_data = 0;
void setup(){
Serial.begin(9600);
apds.init()
//Start APDS-9930 tryb zbliżeniowy (bez przerwania)
if ( apds.enableProximitySensor(false) ) {
Serial.println(F("Sensor pracuje"));
} else {
Serial.println(F("Błąd inicjacji!"));
}
//parametr PPULSE
apds.wireWriteDataByte(APDS9930_PPULSE, 4);
//parametr POFFSET
apds.wireWriteDataByte(APDS9930_POFFSET, -150);
}
void loop() {
//Odczyt wartości trybu zbliżenia
if ( !apds.readProximity(proximity_data) ) {
Serial.println("Błąd odczytu");
} else {
Serial.print("Zbliżenie: ");
Serial.println(proximity_data);
}
//Pauza 250 ms przed następnym odczytem
delay(250);
}
Po inicjacji następuje włączenie trybu zbliżeniowego. Dobierając wartość współczynnika PPULSE w zakresie 1...255 określa się sposób reakcji czujnika. Na rysunku 2 pokazano jak różne wartości współczynnika wpływają na wynik pomiaru w funkcji rzeczywistej odległości obiektu od czujnika.

Dobranie wartości POFFSET eliminuje szumy odczytu gdy obiekt znajduje się poza zakresem. Następnie w pętli odczytywany jest współczynnik, którego wartość rosnąca od 0 do 1023 oznacza stopniowe zbliżanie się obserwowanego obiektu do czujnika.
APDS9930 i Nucleo
Czujnik można podłączyć do dowolnej platformy sprzętowej o ile pracuje z poziomami logicznymi 0/3,3 V, potrafi obsłużyć transmisję I2C i jest w stanie dostarczyć zasilanie do czujnika. Warunki te spełnia dowolna płytka Nucleo z kontrolerem STM32. W tabeli 1 zestawiono potrzebne połączenia dla trybu pracy bez wykorzystania wyjścia przerwania.
| Czujnik APDS9930 | Nucleo | Opis |
| SDA | PB9 | linia SDA magistrali I2C1 |
| SCL | PB8 | linia SCL magistrali I2C1 |
| Vcc | 3,3 V | zasilanie modułu |
| GND | GND | masa |
| VL | 3,3 V/100 mA | zasilanie diody IR modułu |
Niezbędnym krokiem jest dostosowanie biblioteki czujnika APDS9930 do współpracy z płytką Nucleo. Jedna z możliwości to skorzystanie z projektu STM32Duino. Są to biblioteki „tłumaczące” oprogramowanie pisane dla Arduino na kod wykonywalny dla płyt z kontrolerami rodziny STM32. Inną możliwością jest użycie środowiska programistycznego przeznaczonego dla STM-ów i dostosowanie biblioteki czujnika. W tym drugim podejściu trzeba dostosować procedury odwołujące się bezpośrednio do warstwy sprzętowej komunikującej się z interfejsem I2C. W bibliotece APDS9930 do komunikacji z magistralą I2C zastosowano kilka procedur biblioteki Arduino - Wire.c. Są to:
- begin() – ustawienia inicjujące bibliotekę Wire,
- requestFrom() – odczyt do buforu z układu o podanym adresie żądanej liczby bajtów,
- beginTransmission() – przygotowanie do wysłania określonej liczby bajtów z bufora do układu,
- endTransmission() – zakończenie wysyłania bajtów do układu,
- write() – realizacja wysłania bajtów,
- available() – zwraca ilość odebranych bajtów oczekujących w buforze,
- read() – odczyt z bufora odbiorczego pojedynczego bajtu.
Należy pamiętać, że w bibliotece Wire operacje przesyłania danych pomiędzy układem nadrzędnym a podporządkowanym (w tym przypadku modułem APDS9930) odbywają się za pośrednictwem 32-bitowych buforów: nadawczego i odbiorczego. Należy zatem napisać własne procedury, które będą realizowały wymienione funkcje, korzystając z dostępu do sprzętowego interfejsu kontrolera STM32 zamontowanego na użytej płytce Nucleo.
extern I2C_HandleTypeDef hi2c1;
//odczytuje ilość (quantity) bajtów z układu podrzędnego o adresie (slave_adr)
//zwraca ilość odebranych bajtów w buforze
uint8_t PWire::requestFrom(uint8_t slave_adr, uint8_t quantity) {
HAL_StatusTypeDef status;
status =HAL_I2C_Master_Receive
(&hi2c1, (uint16_t)slave_adr, (uint8_t *)buforRec_Wire,
(uint16_t)quantity, 1000);
if (stat !=HAL_OK) quantity = 0;
ile_w_buforRec_Wire = quantity;
poz_odczytu_w_buforRec_Wire = 0;
return quantity;
}
Na listingu 2 można zobaczyć kod procedury odczytu bajtów z układu podrzędnego realizującej funkcję requestFrom(). Procedura jest jedną z funkcji klasy PWire, która zastąpi arduinową klasę Wire. Jeżeli moduł podłączony zostanie do wyprowadzeń tak jak podano w tabeli, to obsługą magistrali I2C zajmie się sprzętowy interfejs I2C1. Wykorzystywana jest standardowa procedura HAL-a HAL_I2C_Master_Receive(), a także statyczny bufor odbiorczy buforRec_Wire[] o rozmiarze 32 bajtów.
W samej bibliotece APDS9930 potrzebne będą niewielkie zmiany. Dotyczą głównie jej początkowej części i włączanych plików nagłówkowych co pokazano na listingu 3.
// #include <Arduino.h>
#include <PWire.h> //zmienione
#include "APDS9930.h"
#include "algorithm" //dodane
using namespace std; //dodane
#include <stdio.h> //dodane
PWire Wire; //dodane
Przede wszystkim należy usunąć odwołanie do biblioteki Arduino.h i zastąpić plik Wire.h włączeniem stworzonej własnej biblioteki PWire.h. Kolejne pliki nagłówkowe i deklaracja przestrzeni nazw są potrzebne do realizacji niektórych funkcji biblioteki APDS9930. Należy także pozbyć się kilku odwołań do nieobsługiwanej teraz procedury Serial.println().
Ponieważ biblioteka APDS9930 napisana jest w C++, najwygodniej używać ją w projektach dla tego samego języka. Co prawda popularne narzędzie STM32CubeMX generuje projekty w C ale przekształcenie do wersji w C++ nie powinno stanowić wielkiego problemu.
W wersji środowiska programistycznego SW4STM32 po wczytaniu utworzonego projektu należy wybrać opcję Project Explorer → prawy przycisk myszy → Convert to C++. Należy także zmienić nazwę pliku main.c na main.cpp.
Ryszard Szymaniak












