Zaloguj
Zaloguj




Powszechnie spotykanym w mikrokontrolerach zasobem są układy licznikowe. Zasada ich działania opiera się na zliczaniu impulsów sygnału taktującego (generowanego wewnątrz mikrokontrolera lub doprowadzanego do niego z zewnątrz). Funkcjonalność ta umożliwia układom licznikowym na realizowanie przeróżnych zadań. Główne z nich to:
Wytwarzanie sygnałów cyfrowych na wyjściu portu mikrokontrolera, w szczególności sygnału PWM. Tego typu sygnał przydatny jest np. w sterowaniu prędkością silników DC, w ustawianiu pozycji serwomechanizmu oraz w zmienianiu poziomu jasności oświetlenia opartego na diodach LED.
Określanie parametrów sygnałów cyfrowych na wejściu portu mikrokontrolera np. długości impulsu lub liczby impulsów. Druga z wymienionych funkcjonalności używana jest np. w tradycyjnych (mechanicznych) licznikach wody.
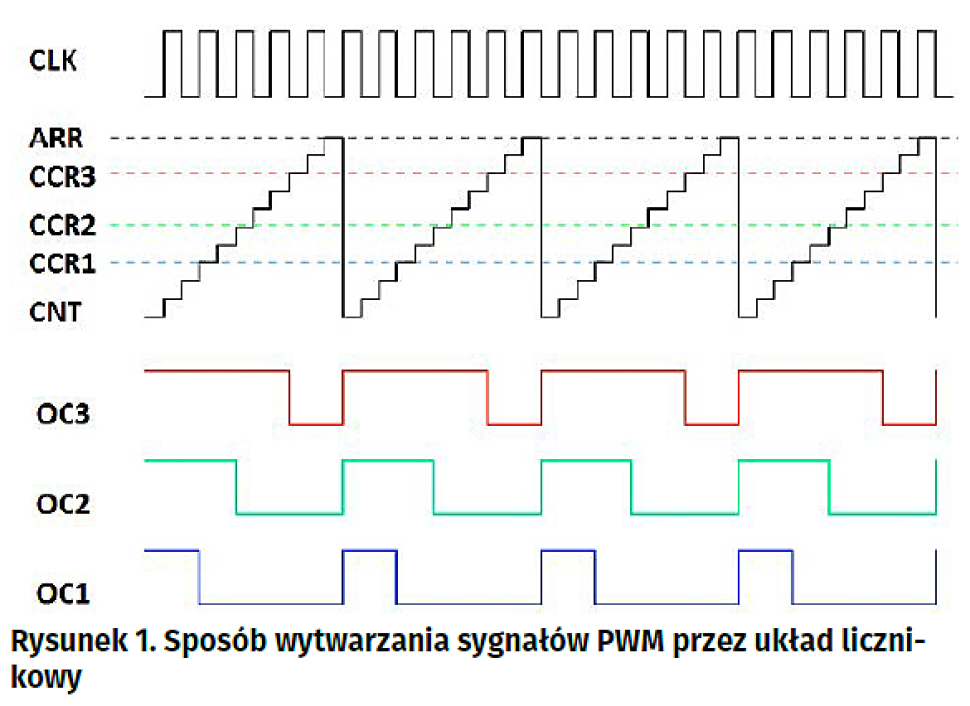
Cechą wspólną wszystkich sygnałów wytwarzanych przez układ licznikowy jest ich cyfrowy charakter. Oznacza to, że sygnał może przyjąć jeden z dwóch stanów: niski i wysoki. Wartość napięcia tych stanów odpowiada wartościom, jakie może przyjąć port mikrokontrolera: stan niski to 0 V, natomiast stan wysoki to typowo 3,3 V lub 5 V. Szczególnym przypadkiem sygnału generowanego przez układ licznikowy jest sygnał PWM. Jest to sygnał o zadanych: częstotliwości/okresie oraz poziomie wypełnienia (procentowo wyrażonym czasie trwania poziomu wysokiego w jednym okresie sygnału). Wytwarzanie sygnałów PWM przez układ licznikowy pokazano w praktyce na rysunku 1.

Mikrokontrolery STM8S mogą być wyposażone (w zależności od modelu) w trzy różne typy układów licznikowych: zaawansowanego sterowania (TIM1), ogólnego przeznaczenia (TIM2/TIM3/TIM5) oraz podstawowe (TIM4/TIM6). Wszystkie te peryferia oparte są na tej samej architekturze (rejestry, podstawowe funkcje), natomiast różnią się wybranymi cechami i parametrami. Zestawienie porównawcze zaprezentowano w tabeli 1.
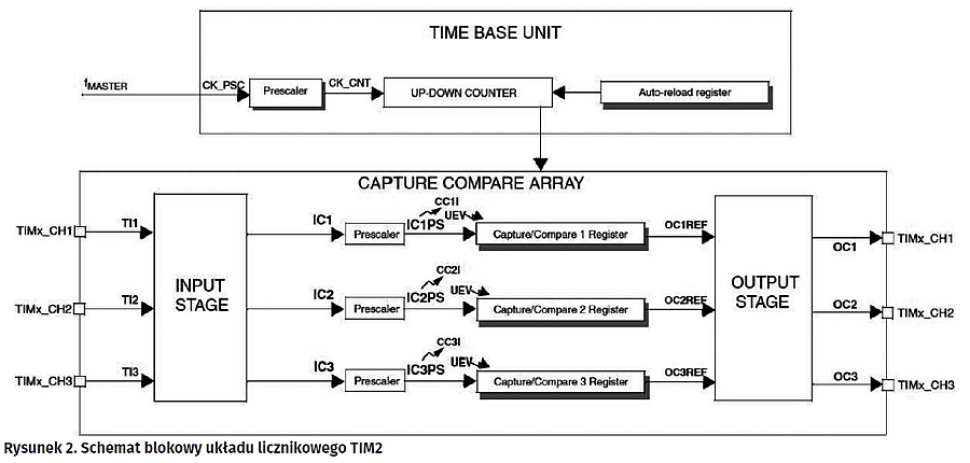
Mikrokontroler STM8S001J3 wyposażony jest w dwa układy licznikowe: TIM1 oraz TIM2. Schemat blokowy układu licznikowego TIM2 pokazano na rysunku 2. Układ ten taktowany jest (podobnie jak wszystkie zasoby mikrokontrolera) przez sygnał fMASTER, który wytwarzany jest z wewnętrznego lub zewnętrznego źródła sygnału zegarowego (HSI, LSI lub HSE). Maksymalna częstotliwość tego sygnału to 16 MHz. fMASTER doprowadzony jest do modułu układu licznikowego o nazwie TIME BASE UNIT. Istnieje możliwość zredukowania częstotliwości tego sygnału przez 4-bitowy podzielnik. Następnie impulsy sygnału taktującego są zliczane przez 16-bitowy licznik (w zależności od konfiguracji w górę lub w dół). Wartość licznika nieustannie porównywana jest z wartością ustawioną w rejestrze Auto-reload, aby w momencie gdy wielkości te są takie same nastąpiło przywrócenie licznikowi wartości początkowej. Wartość licznika używana jest przez drugi z modułów układu licznikowego – CAPTURE/COMPARE ARRAY. Składa się on głównie z podzielników i rejestrów Capture/Compare, sekcji OUTPUT STAGE odpowiedzialnej za wytwarzanie sygnałów cyfrowych na wyjściach kanałów i portów oraz sekcji INPUT STAGE odczytującej sygnały cyfrowe z wejść kanałów i portów.
TIM2 w STM8CubeMX
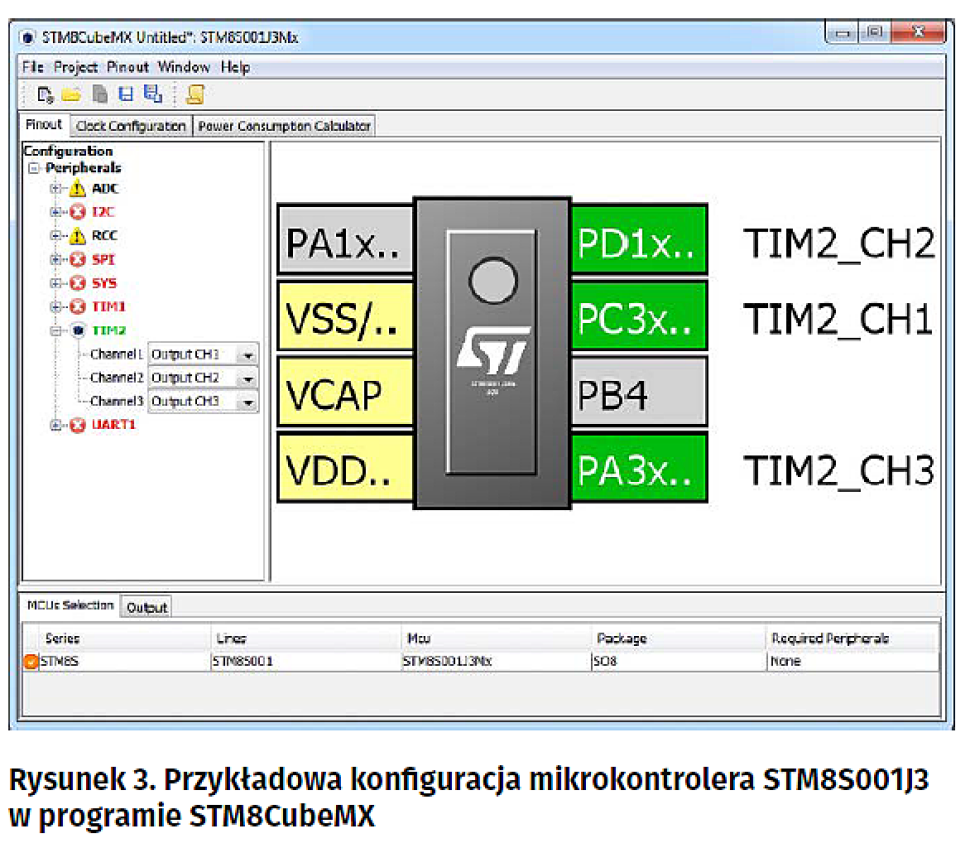
Narzędziem ułatwiającym pracę z portami wejścia/wyjścia mikrokontrolera STM8S001J3 jest program komputerowy STM8CubeMX. Dzięki niemu programista może w prosty sposób (za pomocą graficznego interfejsu użytkownika) sprawdzić jakie są możliwe konfiguracje dla wszystkich portów oraz peryferiów mikrokontrolera. Tak jest również w przypadku układów licznikowych. Przykładowy scenariusz z trzema kanałami TIM2 pokazano na rysunku 3.
Funkcje SPL do sterowania układem licznikowym TIM2
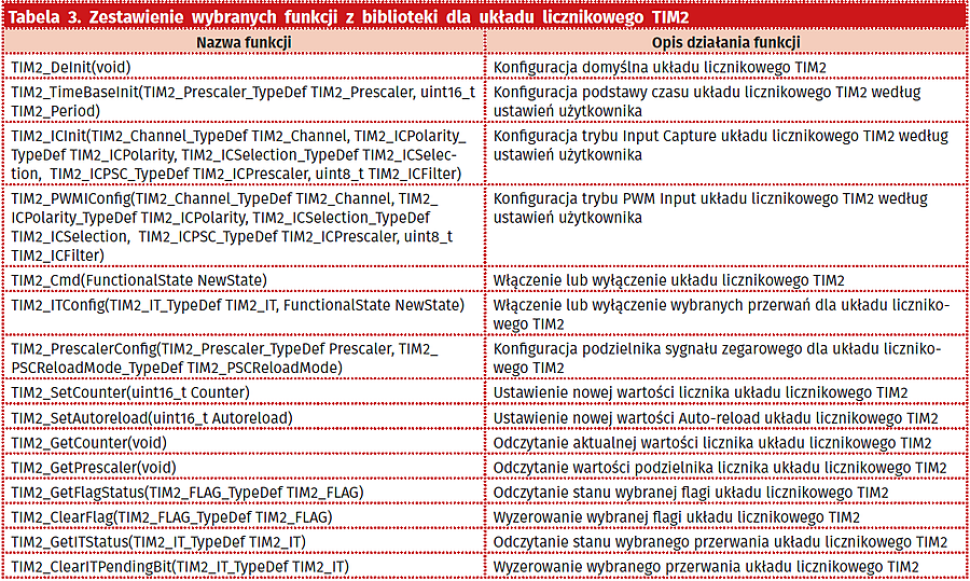
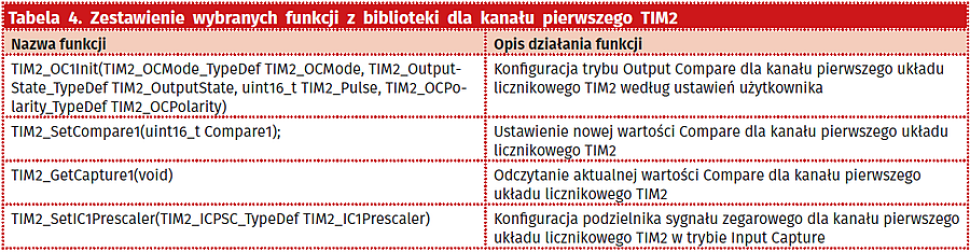
Aby w prosty sposób skonfigurować i używać licznika TIM2 w układzie STM8S001J3, warto w aplikacji użyć bibliotek SPL (Standard Peripheral Library) przygotowanych dla mikrokontrolerów z rodziny STM8S. Pliki stm8s_tim2.h oraz stm8s_tim2.c udostępniają szereg funkcji do tego celu. Zestawienie najważniejszych funkcji zaprezentowano w tabeli 3.
Przykładowa aplikacja sterująca układem licznikowym TIM2
W celu stworzenia przykładowej aplikacji użyte zostało środowisko programistyczne STVD (ST Visual Develop) oraz kompilator Cosmic CXSTM8. Opis tych narzędzi, jak również instrukcja jak stworzyć za ich pomocą szablon nowego projektu wraz z dodaniem bibliotek SPL dostępne są w artykule numer 3 z tej serii (EP 2/2018). Korzystając ze wspomnianego szablonu projektu należy edytować kod pliku main.c, w którym umieszczony zostanie kod aplikacji.
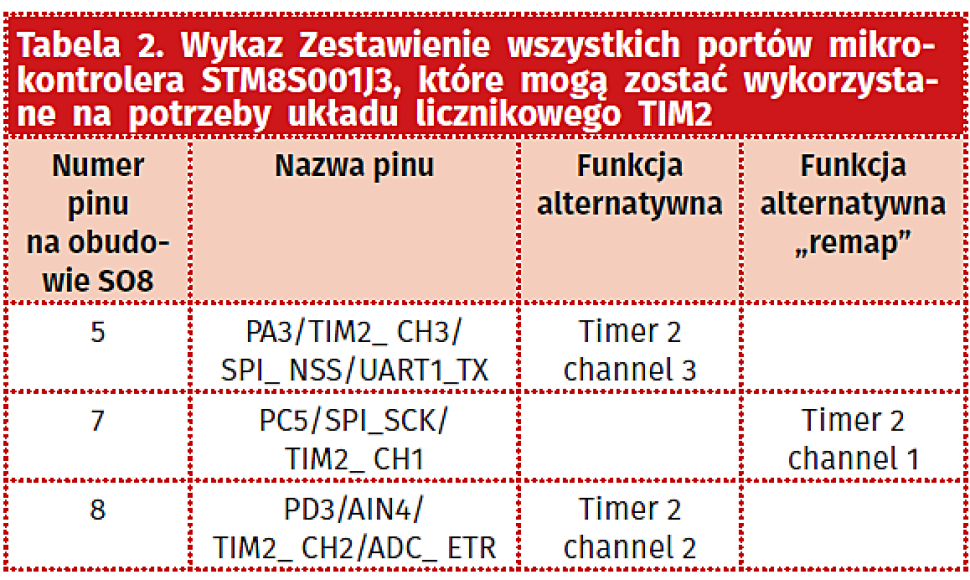
Przykładowa aplikacja wykorzystuje układ licznikowy TIM2 do generowania sygnału PWM. Wybrany do tego celu został kanał trzeci dostępny na porcie mikrokontrolera PA3 (pin numer 5). Aplikacja zwiększa wypełnienie sygnału od 0 do 99% z. Zwiększanie odbywa się stopniowa – z krokiem 1%. Po osiągnięciu wypełnienia maksymalnego czynność zaczyna się od początku (nieskończona pętla). W celu zaimplementowania opisanej aplikacji wykonane zostaną następujące kroki w pliku main.c:
Utworzenie zmiennej Pulse, która użyta zostanie do przechowywania poziomu wypełnienia sygnału PWM (wartość początkowa 0).
Wywołanie funkcji opóźniającej delay(), co przeciwdziała przez kilka sekund ewentualnemu późniejszemu wyłączeniu interfejsu programowania i debugowania SWIM będącego efektem rekonfiguracji portów.
Wykonanie kodu konfiguracji portów wejścia/wyjścia, które nie są poł?czone z?wyprowadzeniami mikrokontrolera (kod wzięty z noty aplikacyjnej AN5047: Getting started with the STM8S001J3 microcontroller).
1. Wywołanie funkcji TIM2_Deinit() w celu wykonania konfiguracji domyślnej układu licznikowego TIM2.
2. Wywołanie funkcji TIM2_TimeBaseInit() w celu skonfigurowania podstawy czasu dla układu licznikowego TIM2.
3. Wywołanie funkcji TIM2_OC3Init() w celu skonfigurowania kanału trzeciego układu licznikowego TIM2 do pracy w trybie Output Compare.
4. Wywołanie funkcji TIM2_Cmd() w celu włączenia układu licznikowego TIM2.
1. Wywołanie funkcji TIM2_SetCompare3 () w celu zmiany poziomu wypełnienia sygnału PWM zgodnie z wartością zmiennej Pulse.
2. Zwiększenie o 1 wartości zmiennej Pulse.
3. Sprawdzenie za pomocą instrukcji warunkowej if() czy zmienna Pulse osiągnęła wartość 99. Jeśli tak, wyzerowanie zmiennej.
4. Wywołanie funkcji opóźniającej delay() w celu wytworzenia odstępu czasu między kolejnymi zmianami poziomu wypełnienia sygnału PWM.
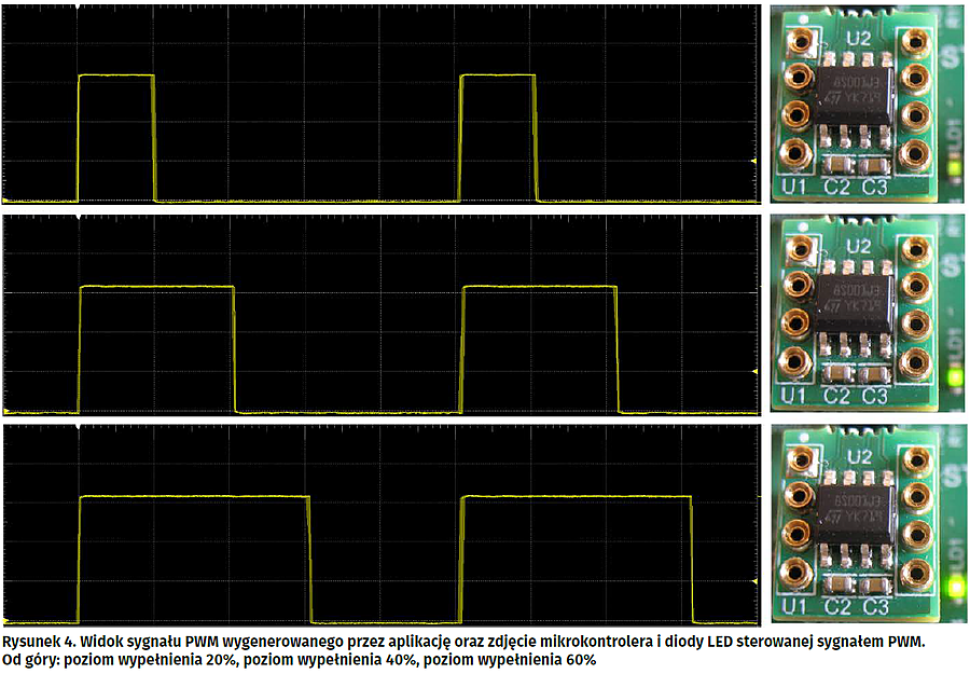
Kod zgodny z zaprezentowanym opisem pokazano w listingu 1. Działanie aplikacji obserwować można poprzez podłączenie diody LED do portu PA3 mikrokontrolera. Jasność świecenia diody LED odzwierciedla poziom wypełnienia sygnału PWM. Przy zerowym i niskim poziomie wypełnienia dioda LED nie emituje światła. Przy bardziej znacznym poziomie wypełnienia dioda zaczyna emitować światło. Wraz ze wzrostem poziomu wypełnienia poziom jasności diody LED również zwiększa się. Jasność maksymalna uzyskiwana jest dla maksymalnego poziomu wypełnienia sygnału PWM. Bardziej szczegółowo sygnał PWM można obserwować za pomocą oscyloskopu. Wygenerowany przez aplikację sygnał PWM z kilkoma przykładowymi poziomami wypełnień pokazano na rysunku 4.
W artykule przekazano podstawowe informacje o układzie licznikowym TIM2 mikrokontrolera STM8S001J3 wraz z opisem przykładowej aplikacji. Osoby chcące dowiedzieć się bardziej szczegółowych informacji powinny sięgnąć do dokumentacji technicznej producenta. Parametry i charakterystyka wszystkich układów licznikowych dostępne są w nocie katalogowej mikrokontrolera (datasheet). Z kolei schematy oraz opis wszystkich funkcjonalności i rejestrów znajduje się w podręczniku użytkownika mikrokontrolera (user manual RM0016). Dodatkowo szereg aplikacji testowych dostępny jest w dedykowanym podkatalogu bibliotek SPL: …STM8S_StdPeriph_LibProjectSTM8S_StdPeriph_ExamplesTIMx, gdzie x oznacza numer licznika.
Szymon Panecki
szymon.panecki@st.com