Zaloguj
Zaloguj



Najczęściej spotykanym rozwiązaniem jest zastosowanie wewnętrznej lub zewnętrznej pamięci EEPROM oraz zapisywanie poszczególnych nastaw (zmiennych) bezpośrednio pod adresami fizycznymi w pamięci nieulotnej. Jedyną zaletą takiego rozwiązania jest prostota, natomiast podejście to ma szereg wad, do których możemy zaliczyć: zależność kodu aplikacji od konkretnego typu pamięci oraz jej architektury, brak możliwości dynamicznej zmiany rozmiaru danego rekordu czy brak możliwości usunięcia rekordu.
Również istotną wadą jest nierównomierne obciążenie pamięci cyklami zapisu, gdzie wykorzystywany jest tylko początkowy obszar, prowadząc do szybszego uszkodzenia pamięci nieulotnej, która z reguły ma ograniczoną ilość cykli zapisu.
Z uwagi na to, iż zapis danych konfiguracyjnych jest jedną z najczęściej wykorzystywanych funkcjonalności aplikacji system ISIXRTOS został wyposażony w API służące do obsługi danych konfiguracyjnych w sposób niezależny od sprzętu.
Interfejs ten stanowi część biblioteki libfoundation. Biblioteka również może być wykorzystana we własnych projektach pozbawionych systemu operacyjnego, ponieważ jest niezależna od jądra systemu. Architektura tego rozwiązania oparta jest o podział pamięci na równomiernej wielkości jednostki alokacji, i charakteryzuje się następującymi parametrami:
- API niezależne od architektury pamięci przechowującej dane.
- Wsparcie dla pamięci o zapisie swobodnym np. EEPROM oraz wsparcie dla pamięci zorganizowanych w postaci stron np. Flash.
- Równomierne wykorzystanie wszystkich komórek pamięci tzw. Wear Leveling.
- Identyfikacja zasobu/danych po kluczu (int).
- Możliwość dodawania oraz usuwania dowolnych zmiennych.
- Możliwość zapisu danych o dynamicznym rozmiarze.
- Zabezpieczenie integralności poszczególnych zmiennych za pomocą algorytmu CRC16.
Architektura biblioteki
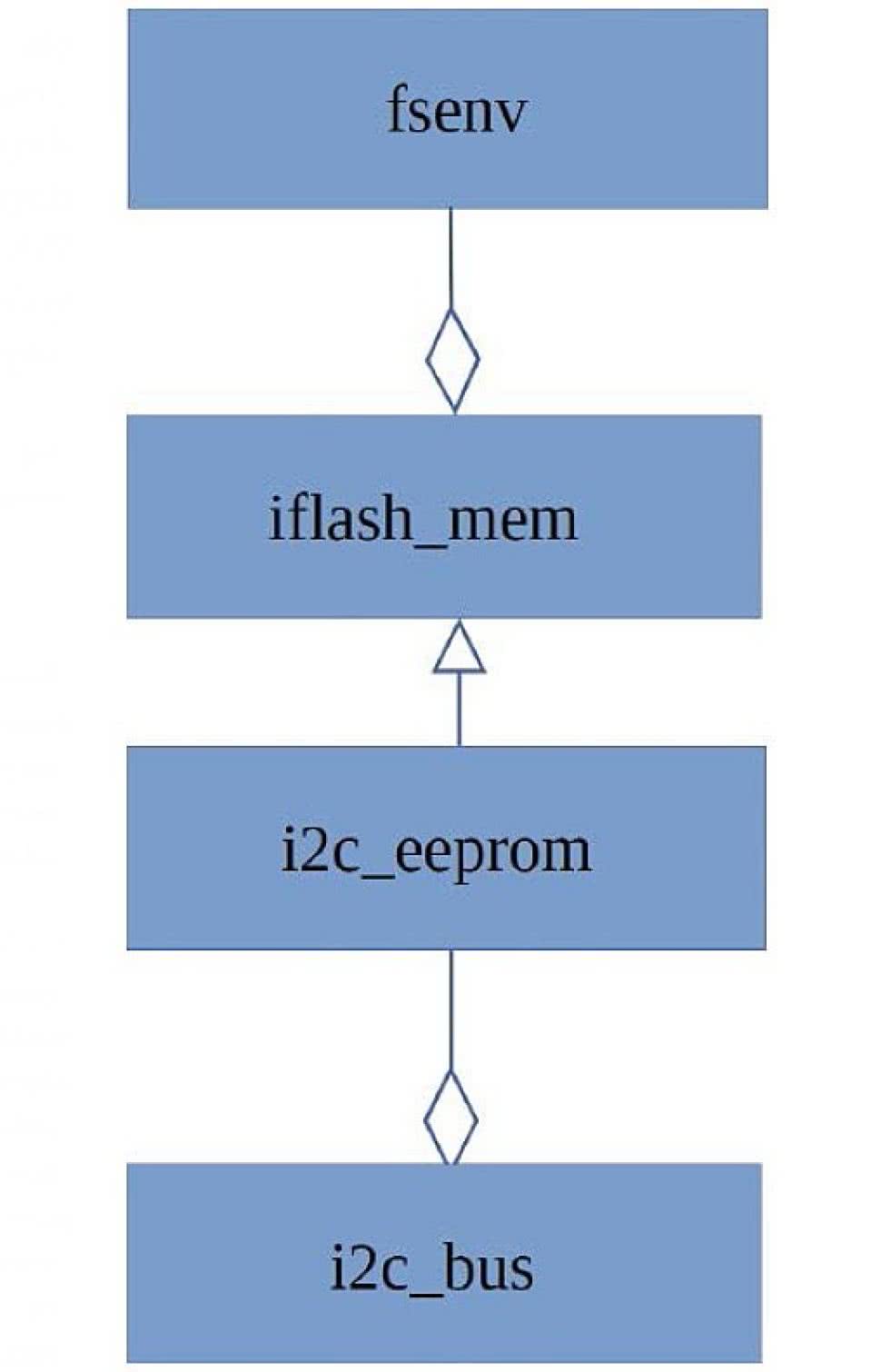
Rysunek 1. Warstwowa konstrukcja biblioteki
Biblioteka obsługująca zapis danych konfiguracyjnych zrealizowana została w sposób warstwowy, aby uniezależnić sposób organizacji przechowywanych od danych fizycznego układu pamięci służącego do ich przechowywania (rysunek 1).
Została ona napisana w języku C++ w dialekcie ISO/IEC 14882:2011 i z wykorzystaniem programowania obiektowego. Klasa fsenv, implementuje niezależny od sprzętu sposób organizacji zapisu danych jednocześnie stanowiąc interfejs API użytkownika.
Konstruktor klasy przyjmuje referencję do abstrakcyjnej klasy bazowej iflash_mem, która stanowi interfejs reprezentujący pamięć masową. Jako drugi argument przyjmuje liczbę stron pamięci które będą zarezerwowane do przechowywania zmiennych nieulotnych:
fs_env( iflash_mem& flash_mem , unsigned n_pg = 0 )
Dodatkowy argument bywa przydatny, gdy do przechowywania danych chcemy wykorzystać kilka stron pamięci zamiast całego dostępnego obszaru np. w celu wykorzystania kilku stron wolnej pamięci Flash mikrokontrolera. Parametr ten ma domyślnie zdefiniowaną wartość równą 0, co oznacza wykorzystanie całego dostępnego obszaru.
Aktualnie w systemie ISIXRTOS dostępne są dwie implementację interfejsu i2c_flash_mem stanowiące część odrębnej biblioteki libisixdrvstm32. Klasa i2c_eeprom udostępnia sterownik dla pamięci EEPROM, natomiast klasa stm32fmc udostępnia sterownik wykorzystujący wolne strony pamięci FLASH mikrokontrolera rodziny STM32.
Podczas tworzenia obiektu klasy fsenv możemy przekazać referencję do obiektu klasy i2c_eeprom, co będzie owocowało przechowywaniem danych konfiguracyjnych w zewnętrznej pamięci EEPROM lub referencję do obiektu klasy stm32fmc, w wyniku czego dane konfiguracyjne zostaną zapisane w wewnętrznej pamięci Flash mikrokontrolera.
Liczba stron zarezerwowanych do tego celu możemy określić za pomocą parametru n_pg. Dzięki klasie fsenv potrafiącej obsługiwać pamięci o zapisie swobodnym jak i stronicowanej, użytkownik końcowy jest całkowicie uniezależniony od jej fizycznej organizacji i może skupić się jedynie na zapisie lub odczycie danych. Dopisując kolejne klasy implementujące interfejs iflash_mem możemy utworzyć dodatkowe sterowniki obsługujące inne rodzaje pamięci.
Przedstawiony wcześniej rysunek przedstawia hierarchię klas przy korzystaniu ze sterownika klasy i2c_eeprom obsługującej pamięci EEPROM typu I²C. Przy tworzeniu obiektu tego typu należy przekazać referencję do obiektu i2c_bus reprezentującego szynę I²C, do której jest dołączona pamięć oraz określić adres pamięci i jej rodzaj.
Klasa fsenv udostępnia prosty interfejs służący do przechowywania danych. Metody publiczne wzorowane są na linuksowych funkcjach z biblioteki libc, które w oryginalnej implementacji służą do zapisywania zmiennych środowiskowych. Różnią się jedynie rodzajem klucza, gdzie w przypadku funkcji linuksowych, identyfikatorem jest wartość tekstowa reprezentująca nazwę zmiennej, natomiast w przypadku klasy fsenv identyfikator stanowi wartość liczbowa.
- int set( unsigned env_id, const void* buf, size_t buf_len );
Metoda set klasy fsenv służy do zapisania danych w pamięci nieulotnej. Parametr env_id stanowi identyfikator / klucz zapisywanej wartości. Parametr buf stanowi wskaźnik na dane do zapisania natomiast parametr len określa ich wielkość. Funkcja zwraca wartość err_success(0) w przypadku powodzenia, natomiast w przypadku wystąpienia problemów zwracany odpowiedni kod błędu z warstwy fsenv lub niższej. - int get( unsigned env_id, void* buf, size_t buf_len );
Metoda get jest analogiczną metodą służącą do odczytania danych z pamięci nieulotnej. Parametr env_id stanowi identyfikator / klucz odczytywanej danej. Parametr buf określa wskaźnik do bufora, gdzie dane będą przekopiowane natomiast parametr buf_len określa rozmiar bufora. Jeśli jego rozmiar będzie mniejszy niż ilość rzeczywistych danych przechowywanych w pamięci nieulotnej pod tym identyfikatorem, funkcja skopiuje tylko część danych o wielkości przekazanej przez zmienną buf_len. Funkcja zwraca wartość err_success(0) w przypadku powodzenia, natomiast w przypadku wystąpienia problemów zwracany odpowiedni kod błędu z warstwy fsenv lub niższej. - int unset( unsigned env_id );
Metoda unset klasy fsenv służy do usunięcia danych, z pamięci nieulotnej, których identyfikator / klucz przekazano jako parametr env_id. Funkcja zwraca wartość err_success(0) w przypadku powodzenia, natomiast w przypadku wystąpienia problemów zwracany odpowiedni kod błędu z warstwy fsenv lub niższej.
Przykład praktyczny

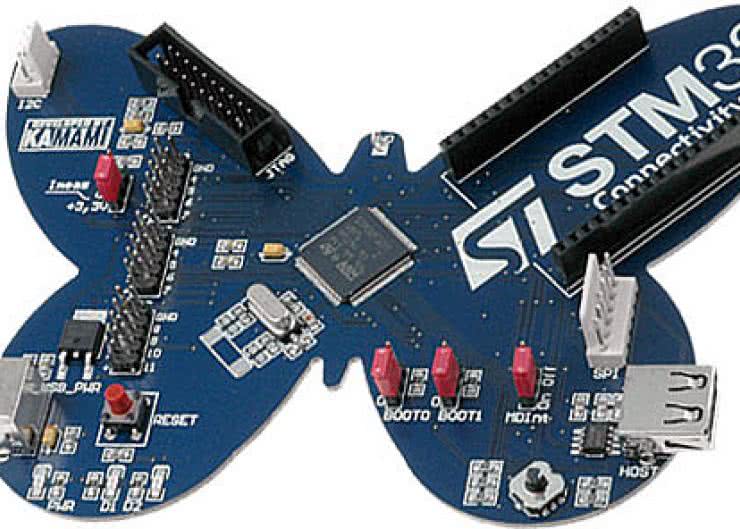
Rysunek 2. Sposób dołączenia pamięci zewnętrznej 24C16 do zestawu STM32Butterfly
Aplikacja prezentująca użycie wspomnianej biblioteki dołączona jest do przykładów dla systemu ISIX i znajduje się w katalogu advanced/envfs. Kompilacja przykładu odbywa się za pomocą polecenia make. Aplikacja została przygotowana na platformę STM32Butterfly, która pozbawiona jest zintegrowanej pamięci EEPROM, zatem aby przetestować działanie należy do złącza I²C (Con7) dołączyć zewnętrzną pamięć EEPROM 24C16 (rysunek 2).
Aby zaobserwować efekt działania przykładu linie PD5 i PD6 należy dołączyć do RX i TX standardowego konwertera poziomów logicznych z układem MAX232. Należy również dołączyć zasilanie zestawu oraz programator JTAG, którym zaprogramujemy mikrokontroler.
Skompilowany przykład wraz z kodami źródłowymi jest dostępny pod adresem http://goo.gl/h1q2R5. Aby zaprogramować zestaw do złącza programującego należy dołączyć dowolny JTAG zgodny z OCDLINK, a następnie wydać polecenie make program.
Po zaprogramowaniu mikrokontrolera należy uruchomić program terminalowy skonfigurowany według następujących parametrów transmisji: 115200,n,8,1. Po zaprogramowaniu na ekranie powinna pojawić się informacja o zapisaniu przykładowej wartości typu int w pamięci nieulotnej, a po 5 sekundach powinna pojawić się informacja o takiej samej wartości która została zapisana wcześniej.
Ponieważ dostęp do danych konfiguracyjnych konieczny jest w wielu miejscach aplikacji, a ponadto w większości przypadków mamy tylko jedno miejsce gdzie przechowujemy dane nieulotne najwygodniejszym sposobem użytkowania powyższej klasy będzie stworzenie odpowiedniego pliku cpp z modułem, w którym globalnie utworzymy statyczny obiekt klasy fsenv oraz udostępnimy w oddzielnej przestrzeni nazw zestaw funkcji setenv/getenv/unsetenv o takich samych deklaracjach argumentów, jak metody klasy fsenv. W powyższym przykładzie utworzono pliki app_env.cpp oraz app_env.hpp, które udostępniają globalny interfejs do obsługi zmiennych konfiguracyjnych. W stosunku do metod publicznych dodano dodatkowe dwie funkcje korzystające z mechanizmu wzorców setenv oraz getenv:
template int setenv( unsigned env_id, const T& value ) {
return setenv( env_id, &value, sizeof( T ) );
template int getenv( unsigned env_id, T& value ) {
return getenv( env_id, &value, sizeof( T ) );
}
o takiej samej nazwie, jak pierwotne funkcje setenv oraz getenv, ale przyjmującej tylko dwa parametry. Dzięki takiemu rozwiązaniu, jeśli chcemy zapisać do pamięci nieulotnej wartość np. typu int wystarczy, że podamy jedynie klucz / identyfikator zmiennej oraz referencję do niej, a kompilator odpowiednio rozwinie wzorzec.
Ponieważ magistrala I²C może być również wykorzystana do podłączenia innych układów, obiekt magistrali i2c nie jest tworzony jako część modułu app_ env, tylko jest przekazywany przez referencję jako argument funkcji init(), która powinna być wywołana przed rozpoczęciem korzystania interfejsu app_env. Implementacja wspomnianych wcześniej funkcji jest bardzo prosta.
Na początku modułu w anonimowej przestrzeni nazw zdefiniowano inteligentne wskaźniki typu std::unique_ptr do obiektu fs_env oraz i2c_eeprom namespace {
static constexpr auto I²CA_ EEPROM = 0xA0;
std::unique_ptr m_eeprom;
std::unique_ ptr m_ fsenv;
isix::semaphore m_lock {1, 1};
}
Tworzenie obiektów klas oraz inicjalizacja wskaźników realizowana jest przez wspomnianą wcześniej funkcję init, której definicja wygląda następująco:
void initenv( fnd::bus::ibus& bus ){
if( !m_eeprom ) {
m_eeprom.reset(new fnd::i2c_eeprom(bus, I²CA_EEPROM, fnd::i2c_eeprom::type::m24c16));
m_fsenv.reset( new fnd::filesystem::fs_env( *m_eeprom ) );
}
}
Na początku sprawdzamy czy moduł nie był wcześniej zainicjalizowany, jeśli nie wówczas tworzymy obiekt klasy i2c_eeprom oraz przypisujemy adres tego obiektu wskaźnikowi m_eeprom. Utworzenie tego obiektu wymaga podania referencji do magistrali, określenie typu pamięci i2c oraz podania jej fizycznego adresu na magistrali.
Gdy już mamy gotowy obiekt klasy i2c_eeprom możemy przystąpić do utworzenia właściwego obiektu fsenv przekazując mu referencję do utworzonego wcześniej obiektu odpowiedzialnego za fizyczną obsługę pamięci. Po wykonaniu powyższych czynności inicjalizujących możemy dowolnie używać funkcji setenv/getenv/unsetenv. Przykład implementacji funkcji setenv modułu przedstawiono poniżej:
int setenv( unsigned env_id, const void* buf, size_t buf_len ) {
isix::sem_lock _lck( m_lock );
if( m_fsenv ) {
return m_fsenv->set( env_ id, buf, buf_len );
} else {
return env::err_not_init;
}
}
Funkcja ta sprowadza się do wywołania odpowiednich metod publicznych obiektu m_fsenv. Jedynym dodatkiem jest sprawdzenie czy obiekt m_fsenv istnieje oraz zabezpieczenie w postaci semafora, gdyby funkcje miały być wywoływane z wielu wątków. Realizacja współbieżności mogła być zrealizowana bezpośrednio w implementacji klasy fsenv, jednak z uwagi na chęć maksymalnego uniezależnienia implementacji klasy od systemu została ona wydzielona, aby można ją było wykorzystać samodzielnie bez ISIX-a.
Mając gotowy zestaw funkcji umożliwiających zapis danych konfiguracyjnych możemy teraz przystąpić do ich wykorzystania w aplikacji, co zostało zaprezentowane w klasie env_tester znajdującej się w pliku envfsmain.cpp. Najistotniejszy fragment implementacji przedstawiono poniżej:
protected:
virtual void main() {
initenv( m_i2c );
//! Set the env static constexpr int val = 0x12345678;
auto err = setenv( envid_ test, val );
dbprintf("Setenv code %i", err );
//! Read the env isix::isix_wait_ms( 2000 );
int val2 {};
err = getenv( envid_test, val2 );
dbprintf("Getenv code %i value %08x", err, val2 );
}
private:
stm32::drv::i2c_bus m_i2c {
stm32::drv::i2c_bus::busid::i2c1 , 400000 };
Klasa env_tester zawiera obiekt klasy i2c_bus, który jest tworzony przez listę inicjalizującą przyjmującą identyfikator szyny oraz prędkość transmisji. Referencja do tego obiektu jest następnie przekazywana do opisanej poprzednio funkcji initenv.
Po zainicjalizowaniu biblioteki przystępujemy do zapisu przykładowej wartości z wykorzystaniem funkcji setenv w pamięci nieulotnej pod identyfikatorem o wartości envid_test. Następnie po odczekaniu 2 sekund wartość zmiennej reprezentowanej przez identyfikator envid_test jest ponownie odczytywana za pomocą funkcji getenv i wyświetlana na konsoli szeregowej.
Implementacji klasy fsenv (dla dociekliwych )
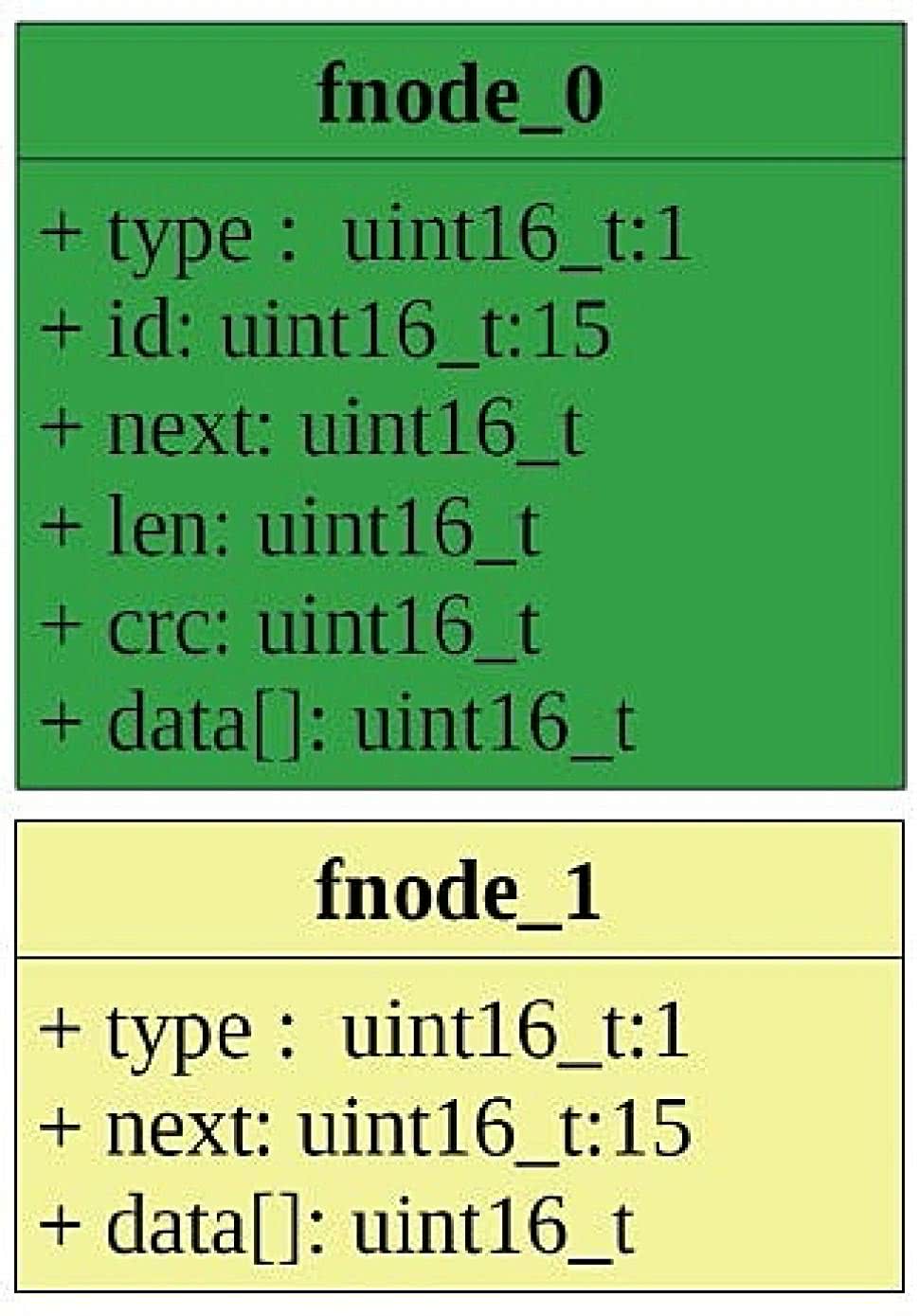
Rysunek 3. Jednostka alokacji może przechowywać jeden z dwóch rodzajów danych, nagłówek oznaczony fnode_0 oraz dane wraz ze wskaźnikiem następnej jednostki alokacji oznaczonym fnode_1
Działanie klasy fsenv oparte jest o ideę listy jednokierunkowej, oraz mechanizm podziału dostępnej pamięci na stałe jednostki alokacji. Rozmiar jednostki dobierany jest dynamicznie w zależności od wielkości pamięci. Jednostka alokacji może przechowywać jeden z dwóch rodzajów danych, nagłówek oznaczony fnode_0 oraz dane wraz ze wskaźnikiem następnej jednostki alokacji oznaczonym fnode_1 (rysunek 3).
Każda nowa zmienna rozpoczyna się od jednostki alokacji typu fnode_0, której znaczenie pól jest następujące:
type - identyfikator jednostki alokacji, gdzie wartość 0 oznacza typ fnode_0, a wartośc 1 typ fnode_1,
id - identyfikator / klucz zmiennej,
next - adres następnej jednostki alokacji, jeśli zmienna nie mieści w pojedynczej jednostce,
len - rozmiar danych przechowywanych,
crc - suma CRC16 weryfikująca integralność danych,
data[] - dane do przechowania.
Jeśli dane która powinny zostać zapisana pod danym identyfikatorem zmieszczą się w polu data[] w nagłówku typu fnode_0, wówczas kolejna jednostka typu fnode_1 nie będzie występować, a pole next przyjmie wartość node_end. Jeśli w polu data[] nagłówka nie uda się zmieścić wszystkich danych, zmienna next będzie zawierała adres następnej jednostki alokacji typu fnode_1.
Jednostka alokacji typu fnode_1 zawiera jedynie identyfikator pola type = 1 oraz adres następnej jednostki alokacji, po czym następują właściwe dane do przechowania. Jeśli pole danych nie zmieści się w kolejnej jednostce alokacji typu fnode_1, wówczas pole next będzie zawierało adres kolejnej jednostki alokacji lub wartość node_end, jeśli jest to ostatnia jednostka alokacji. Na rysunku 4 przedstawiono przykład przedstawiający przydział jednostek alokacji dla dłuższej zmiennej, która wymaga kilku jednostek.
Dodatkowego komentarza wymaga proces kasowania danych realizowany za pomocą metody unset(), Działanie tej metody jest zależne od typu pamięci, z którą klasa fsenv współpracuje. W przypadku pamięci o zapisie swobodnym np. EEPROM kasowanie zmiennej polega na przejściu przez wszystkie wykorzystywane jednostki alokacji i zapisaniu do ich pól next wartości node_dirty = 0.

Rysunek 4. Przykład przedstawiający przydział jednostek alokacji dla zmiennej wymagającej kilku jednostek
Tak oznaczona zmienna może być ponownie wykorzystywana (podobnie jak jednostka oznaczona jako node_empty = 0xffff) podczas wywołania metody set(). Zupełnie inaczej wygląda sytuacja w przypadku pamięci z podziałem na strony, gdzie ponowny zapis danych do danej komórki wymaga usunięcia zawartości całej strony pamięci.
W tym przypadku działanie algorytmu jest odmienne i metoda set() alokując nowe jednostki wykorzystuje tylko zmienne typu node_unused = 0xffff, natomiast metoda unset() wpisuje w pole next wartości node_dirty = 0. Jeśli na danej stronie pamięci nie uda się znaleźć wolnej jednostki alokacji uruchamiany jest proces "odśmiecania" strony polegający na przeniesieniu używanych danych na nieużywaną stronę, a następnie skasowaniu nieużywanego bloku.
Lucjan Bryndza SQ5FGB, EP