 Zaloguj
Zaloguj




Typowymi magistralami komunikacyjnymi pomiędzy ECU w motoryzacji są obecnie Controller Area Network (CAN), Local Interconnect Network (LIN), FlexRay i Ethernet, gdzie magistrala CAN pozostaje najpopularniejszą ze względu na łatwość implementacji, odporność na zakłócenia, możliwość przesyłania wiadomości z określonym priorytetem, arbitraż bitowy do obsługi konfliktów na magistrali, wykrywanie błędów itd.
Łatwość, z jaką można skalować sieć w pojazdach poprzez dodawanie węzłów do istniejącej magistrali CAN, jest ogromną zaletą, jednak stać może się również problemem, gdy sieci te stają się złożone, na przykład połączone w topologii gwiazdy. Odbicia powodowane przez punkty w sieci bez terminacji, które są dołączane do tych sieci, mogą powodować wadliwą komunikację, szczególnie przy wyższych prędkościach. Z tego powodu transceivery standardu CAN-Flexible Data Rate (FD), choć klasyfikowane, jako 5 Mb/s, muszą być używane z prędkością przesyłu danych poniżej 2 Mb/s w rzeczywistych warunkach. Zdolność do poprawy sygnału (tzw. SIC) umożliwia korzystanie z transceiverów CAN-FD z szybkością 5 Mb/s i wyższą w złożonych sieciach gwiaździstych bez konieczności większych zmian w projekcie.
Co to jest SIC?
SIC (Signal Improvement Capability) oznacza zdolność do poprawy sygnału. Jest to dodatkowa funkcja implementowana w transceiverach CAN-FD, która zwiększa maksymalną szybkość transmisji danych możliwą do osiągnięcia w złożonych topologiach gwiazdy poprzez minimalizację oscylacji sygnału. Transceivery CAN z SIC muszą spełniać lub przewyższać specyfikacje nakładane przez normę ISO 11898-2:2016 dla szybkiej warstwy fizycznej CAN oraz być zgodnym z specyfikacją systemu poprawy sygnału organizacji CAN-in-Automation (CiA) numer 601-4.
Na rysunku 1 pokazano zwykły transceiver CAN-FD, w którym sygnał magistrali CAN oscyluje powyżej poziomu 900 mV (dominujący próg odbiornika CAN) i poniżej 500 mV (próg recesywny odbiornika CAN), co powoduje odbiór błędnych danych. Na rysunku 2 pokazano, w jaki sposób transceiver obsługujący CAN SIC zgodne z CiA 601-4 tłumi oscylacje sygnału magistrali, dając w rezultacie prawidłowy sygnał RXD.
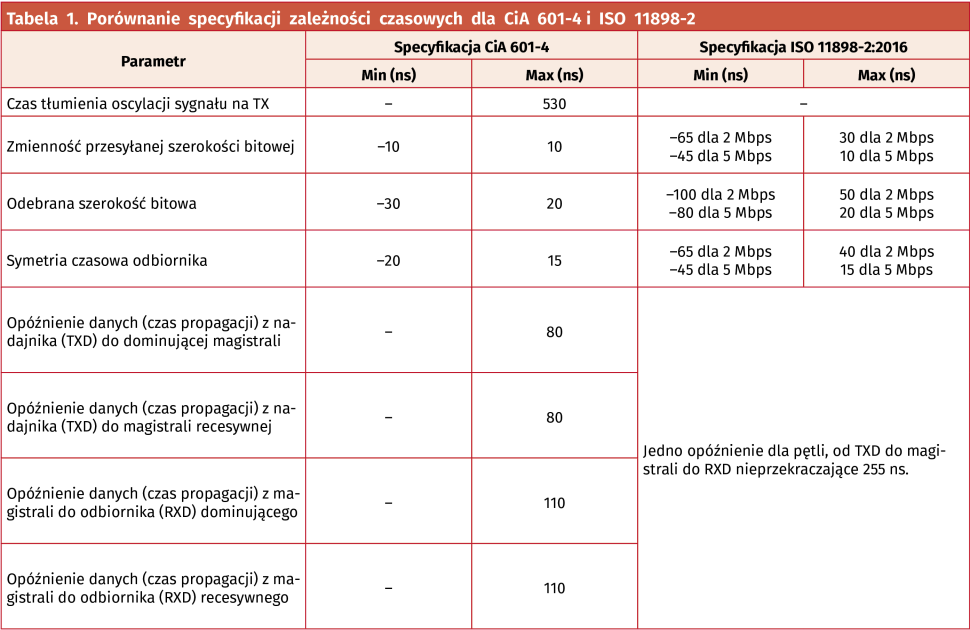
Jeśli chodzi o parametry elektryczne, transceiver CAN SIC zgodny z CiA 601-4 ma znacznie ściślejszą symetrię taktowania bitów i lepszą specyfikację opóźnienia pętli w porównaniu do zwykłego transceivera CAN-FD, jak pokazano w tabeli 1. Dobranie opóźnień ścieżek nadawczych i odbiorczych może pomóc projektantom systemów w jasnym obliczeniu opóźnienia propagacji sieci w obecności innych elementów łańcucha sygnałowego. Należy zauważyć, że taktowanie określone w CiA 601-4 jest niezależne od szybkości transmisji danych i odnosi się zarówno do operacji z szybkością 2, jak i 5 Mb/s.
Ograniczenia klasycznej sieci CAN i CAN-FD
Protokół CAN pierwszej generacji, ISO 11898-2, znany również, jako Classical CAN, został wprowadzony około 1993 roku. Protokół zezwalał na przesyłanie tylko 8 bajtów danych użytkowych z maksymalną szybkość transmisji danych określoną na 1 Mb/s. Ograniczenia te stały się szybko problemem w zastosowaniach motoryzacyjnych, gdzie pojazdy mają szereg elektronicznych węzłów komunikujących się ze sobą za pomocą magistrali CAN.
Około 2015 roku opublikowano specyfikację protokołu CAN-FD, która zwiększyła długość pakietu danych do 64 bajtów i maksymalną szybkość komunikacji w fazie danych do 5 Mb/s. Szybkość sygnalizacji w fazie arbitrażu była jednak nadal ograniczona do 1 Mb/s w celu zapewnienia wstecznej kompatybilności z Classical CAN. Podczas gdy CAN-FD zapewniał szybszą transmisję danych i większą pojemność sieci, to i tak nie był to postęp wystarczający, aby nadążać za stale rosnącą liczbą modułów elektronicznych dodawanych do samochodowych sieci magistrali CAN. Projektanci zdali sobie sprawę, że nie mogą wykorzystać prawdziwego potencjału nadajników-odbiorników CAN-FD, ponieważ oscylacje magistrali wynikające z powstania złożonych sieci o topologii gwiazd wpływa na prawidłową komunikację sygnału.
Na rysunku 3 pokazano przykładową sieć w topologii gwiazdy. W takich topologiach z wieloma odgałęzieniami, sygnał podróżujący po magistrali przechodzi wieloma ścieżkami o niedopasowanej impedancji, co może powodować m.in. odbicia sygnału. Zakłócenia te zniekształcają transmisję na magistralo CAN i powodują oscylacje, co skutkuje występowaniem nieprawidłowego poziomu na magistrali CAN i RXD w momencie próbkowania. Chociaż te efekty nie są specyficzne dla sieci CAN-FD, przy pracy z niższą szybkością w klasycznej implementacji CAN czas trwania bitu jest dłuższy, a oscylacje na magistrali na tyle mniejsze, że możliwe jest próbkowanie właściwego bitu, jak pokazano na rysunku 4, co skutkuje poprawną komunikacją, mimo występowania zakłóceń.
W przypadku działania CAN-FD z szybkością 5 Mb/s czas trwania bitu wynoszący 200 ns jest o wiele za krótki, aby zaniknęły oscylacje w złożonych topologiach gwiazdy, utrudniając niezawodną komunikację danych. To zniechęca projektantów systemów do korzystania z CAN-FD o pełnej prędkości 5 Mb/s.
Wraz ze wzrostem ilości wymienianych danych w sieciach we współczesnych pojazdach i zwiększającym się zapotrzebowaniem na przepustowość, technologia CAN SIC toruje drogę dla nowej generacji magistrali komunikacyjnych w pojazdach. Mają one być szybsze i zapewniać większą elastyczność i skalowalność sieci w pojeździe.
Jak CAN SIC zmniejsza oscylacje w magistrali
Podczas normalnej pracy magistrala CAN ma dwa stany logiczne: recesywny i dominujący, jak pokazano na rysunku 5. Stan dominujący magistrali występuje podczas sterowania różnicowego magistrali i odpowiada niskiemu poziomowi logicznemu na pinach TXD lub RXD. Stan recesywny magistrali występuje, gdy magistrala jest spolaryzowana do połowy napięcia zasilania przez wewnętrzne rezystory wejściowe (RIN) odbiornika i odpowiada stanowi wysokiemu na pinach TXD i RXD. Stan dominujący zastępuje stan recesywny podczas arbitrażu. Zbocze sygnału od recesywnego do dominującego na szynie CAN jest zwykle czyste, ponieważ jest silnie sterowane przez nadajnik. Różnicowa impedancja wyjściowa transceivera CAN podczas fazy dominującej wynosi około 50 Ω i ściśle odpowiada impedancji charakterystycznej sieci. W przypadku zwykłego transceivera CAN-FD zbocze – przejście ze stanu dominującego do recesywnego – ma miejsce, gdy wyjściowa impedancja różnicowa sterownika nagle osiąga około 60 kΩ, a odbity sygnał natrafia na niedopasowanie impedancji, co powoduje oscylacje.
Układ SIC zaimplementowany w nadajniku wykrywa przejście ze stanu dominującego do recesywnego na linii TXD i aktywuje obwód tłumienia oscylacji na wyjściu drivera linii. Sterownik CAN kontynuuje silne recesywne sterowanie magistrali aż do osiągnięcia czasu tSIC_TX_base, czyli czasu tłumienia oscylacji sygnału na TX (patrz tabela 1), tak, że odbicie zmniejsza się, a bit recesywny jest czysty w punkcie próbkowania. W aktywnej fazie recesywnej impedancja wyjściowa nadajnika jest niska (wynosi około 100 Ω). Ponieważ odbity sygnał nie wykazuje dużego niedopasowania impedancji, oscylacje są znacznie wytłumione. Po zakończeniu tej fazy i wejściu urządzenia w pasywną fazę recesywną impedancja wyjściowa sterownika wzrasta do około 60 kΩ. Rysunek 6 obrazuje całą sekwencje zdarzeń przy użyciu technologii CAN SIC.
Ważnym czynnikiem w aktywnej fazie recesywnej jest to, że powinna ona trwać maksymalnie do 530 ns (jak podano w tabeli 1). Faza danych protokołu CAN-FD trwa maksymalnie do 200 ns (jeśli interfejs działa z szybkością 5 Mb/s), więc tłumienie oscylacji będzie aktywne przez cały czas trwania stanu recesywnego, co skutkuje występowaniem tylko prawidłowych sygnałów magistrali CAN i RXD. Jednak w fazie arbitrażu – gdzie najkrótszy czas trwania bitu wynosi 1 μs dla działania z prędkością 1 Mb/s, wiele nadajników może nadawać jednocześnie, a bit dominujący musi nadpisać bit recesywny – czas trwania włączenia układu tłumienia oscylacji może nakładać pewne ograniczenia na ogólną rozległość sieci i szybkość działania systemu arbitrażu. Więcej informacji na ten temat można znaleźć w specyfikacji CiA 601-4.
Wyniki eksperymentów na urządzeniu TCAN1462 firmy TI
Aby zaprezentować funkcję tłumienia oscylacji w transceiverze CAN TCAN1462 jego producent, firma Texas Instruments (TI) przeprowadziła eksperyment z układem w następującej konfiguracji. Dwupunktowy układ komunikacji, gdzie węzeł 1 to TCAN1462, a węzeł 2 to TCAN1044 A, zwykły transceiver CAN-FD, bez funkcjonalności CAN SIC, jak pokazano na rysunku 7. Sieć oscylująca (znormalizowana przez CiA 601-4) emulująca złożoną topologię gwiazdy jest podłączona przez piny do magistrali CAN. Jak pokazują przebiegi na rysunkach 8 oraz 9, magistrala CAN i sygnały RXD wyglądają na czyste, gdy pracuje układ TCAN1462. Ale kiedy siecią steruje TCAN1044 A, w przebiegach magistrali widoczne są oscylacje i problemy z liniami RXD.
Schodzące bardzo nisko napięcie VOD nie stanowi problemu i nie występuje przeregulowanie na tej magistrali, co skutkuje czystymi liniami RXD.
Urządzenia CAN SIC firmy TI
Firma Texas Instruments wypuściła dwa urządzenia CAN SIC: ośmiopinowy TCAN1462 z obsługą trybu czuwania, który jest kompatybilny pin w pin z tradycyjnymi ośmiopinowymi transceiverami CAN oraz 14-pinowy układ TCAN1463, który ma tryb uśpienia i funkcją WAKE/INH i jest kompatybilny pin do pinu z klasycznymi układami transceiverów w obudowach z 14 pinami. Ta kompatybilność wsteczna umożliwia prostą wymianę układu w gotowych konstrukcjach, aby móc zwiększyć ich prędkość transmisji, dzięki użyciu CAN SIC. Oprócz kompatybilnych wstecznie obudów, nowy układ jest dostarczany w miniaturowych obudowach z rodziny SOT23.
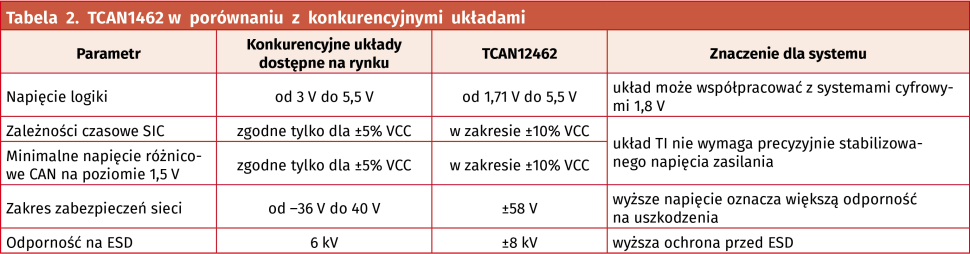
TCAN1462 jest dostępny w dwóch wariantach: TCAN1462 dla logiki 5 V oraz TCAN1462 V z obsługą poziomów logicznych od 1,8 V do 5 V. Urządzenia te mają znaczne zalety w porównaniu z konkurencyjnymi urządzeniami na rynku, jak pokazano w tabeli 2.
Podsumowanie
Transceivery wyposażone w technologię CAN SIC zapewniają znaczne korzyści systemowe w porównaniu ze zwykłymi transceiverami CAN-FD bez potrzeby zmian konstrukcyjnych na warstwie fizycznej czy w aplikacji. Układy te pozwalają na działanie z większą szybkością transmisji bitów, z większą swobodą w wyborze topologii sieci, przy jednoczesnym obniżeniu kosztów i wagi systemu komunikacyjnego.
CAN SIC jest wstecznie kompatybilny z ISO 11898-2, więc może działać na tej samej magistrali, co CAN-FD. Omówione transceivery są wstecznie kompatybilne z innymi, standardowymi, dzięki czemu możliwe jest wprowadzenie zmian w istniejącym projekcie.
Jak pokazano w tabeli 1, transceivery CAN z SIC znacznie poprawiają symetrię taktowania bitów, co zapewnia większy margines dla efektów w sieci, które mogą pogarszać jakość sygnałów w magistrali CAN. Transceiver wprowadza znacznie mniejszą degradację przesyłanych i odbieranych danych, skracając czas trwania bitu, co pozwala mu działać niezawodnie nawet przy prędkości 8 Mb/s. Finalnie, opóźnienie w pętli dla transceiverów CAN SIC wynosi maksymalnie do 190 ns, w porównaniu z maksymalnym opóźnieniem równym 255 ns dla transceiverów CAN-FD. Dzięki temu możliwe jest zwiększenie maksymalnej długości sieci.
Nikodem Czechowski, EP
Bibliografia:
- Vikas Kumar Thawani, „How Signal Improvement Capability Unlocks the Real Potential of CAN-FD Transceivers” Texas Instruments Technical White Paper SLLA581, kwiecień 2022,
- Tony Adamson, „CiA 601-4: CAN signal improvement” CAN Newsletter kwiecień 2019.












