 Zaloguj
Zaloguj



W zależności od potrzeb konkretnego urządzenia, sieci RS-485 muszą być projektowane dla różnego zasilania magistrali, napięcia zasilania interfejsu logicznego, długości i przepustowości sieci. W rezultacie projektanci muszą wybierać, testować i kwalifikować wiele różnych transceiverów RS-485 dostępnych na rynku, aby spełnić specyficzne wymagania danej aplikacji. Ponadto projektanci systemów opracowują różne płytki drukowane (PCB) dla węzłów końcowych i środkowych w sieci, ponieważ węzły końcowe zwykle wymagają rezystora końcowego w celu poprawy jakości sygnału. Proces ten zużywa zasoby projektowe, zwiększając czas i koszt projektowania systemu oraz opóźniając jego wprowadzenie na rynek.
Opisany w dalszej części artykułu układ THVD1424 zapewnia projektantom systemów elastyczność korzystania z tego samego urządzenia w dowolnej lokalizacji węzła (węzeł końcowy i węzeł środkowy), w dowolnej sieci – dwuprzewodowej (half-duplex) lub czteroprzewodowej (full-duplex) i o dowolnej prędkości transmisji. Podejście, jakie zapewnia ten transceiver, pozwala na uproszczenie projektu urządzeń – można zaprojektować tylko jedną PCB dla różnych urządzeń i skonfigurować działanie interfejsu za pomocą oprogramowania do różnych potrzeb i aplikacji, oszczędzając w ten sposób czas i wysiłek związany z projektowaniem, przyspieszając moment wprowadzenia nowego urządzenia na rynek.
Typowe sieci RS-485 i potrzeba terminacji
Na rysunkach 1 i 2 zostały pokazane typowe sieci RS-485 odpowiednio w konfiguracji full-duplex oraz half-duplex. W tych obu topologiach drivery, odbiorniki i transceivery biorące udział w komunikacji łączą się z głównym łączem kablowym za pośrednictwem tzw. końcówek sieciowych (stub). Odgałęzienia te to odległość elektryczna między transceiverem a magistralą kablową i zasadniczo reprezentuje fragment linii magistrali bez terminacji.
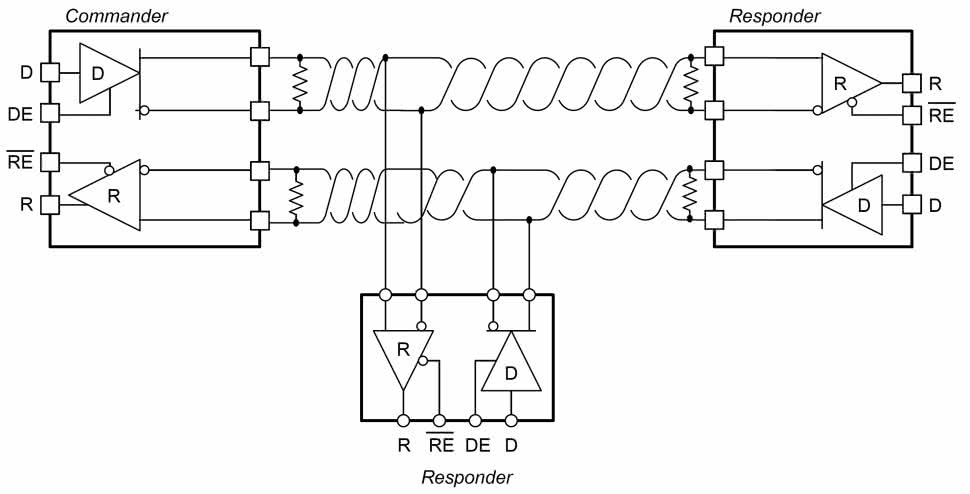
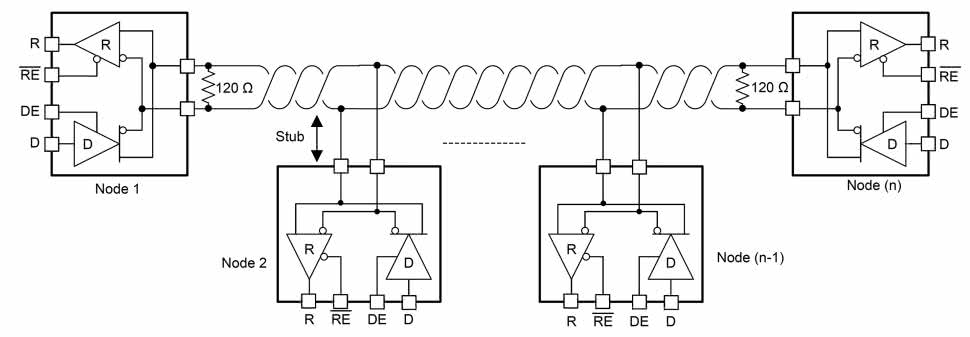
Implementacja sieci w trybie full-duplex wymaga dwóch par sygnałów (czterech przewodów) oraz transceiverów działających w tym trybie z oddzielnymi liniami dostępu do magistrali dla nadajnika i odbiornika. Sieć w takim trybie umożliwia węzłom sieci jednoczesne przesyłanie danych w jednej parze i odbieranie danych w drugiej parze, dzięki czemu uzyskuje się wysoką efektywną przepustowość sieci. W sieci half-duplex używana jest z kolei tylko jedna para sygnałów, co wymaga, aby nadawanie i odbieranie danych odbywało się w różnych momentach czasu. Taka konfiguracja zmniejsza cenę okablowania sieciowego (w porównaniu z siecią z full-duplex) kosztem zmniejszonej przepustowości.
Większość transceiverów RS-485 dostępnych na rynku może działać w trybie half-duplex lub full-duplex, co oznacza, że różne urządzenia mają różnie wyprowadzone piny i obudowy. Jest to pierwszy problem dla projektantów systemów, polegający na konieczności wyboru różnych urządzeń do różnych platform projektowych, w zależności od tego, czy ma to być interfejs full-, czy half-duplex.
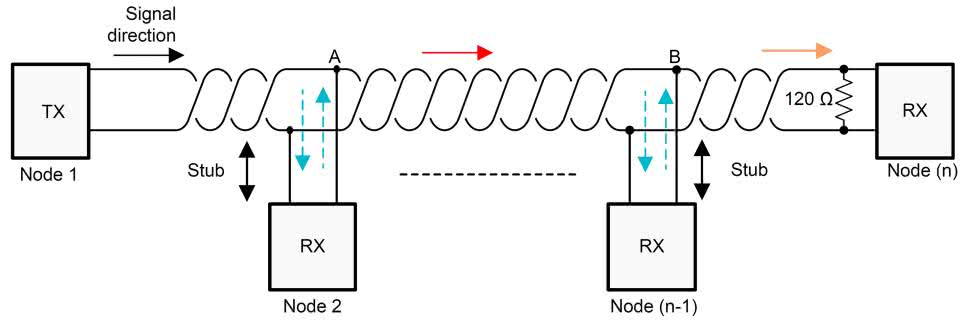
Sygnał elektryczny wędruje przewodami (medium fizyczne) od drivera do wszystkich odbiorników w sieci. Podczas sterowania siecią impedancja wyjściowa sterownika (TX) jest niska, podczas gdy impedancja wejściowa odbiornika (RX) jest zwykle wysoka (na poziomie kΩ). Jak pokazano na rysunku 3, za każdym razem, gdy sygnał napotyka niedopasowanie impedancji, takie jak odgałęzienia węzłów środkowych (w punktach A i B) lub piny wejściowe odbiornika (w węźle n), pewna ilość sygnału jest odbijana w przewodzie, co zakłóca sygnał i pogarsza jakość transmisji. Współczynnik odbicia (r) jest opisany równaniem 1.
gdzie:
- Zt jest impedancją terminacji,
- Zo jest impedancją charakterystyczną przewodów/ścieżek, którymi podąża sygnał.
Zgodnie z teorią linii długich istotne jest ograniczenie nieciągłości niedopasowania impedancji w celu zminimalizowania odbić sygnału. Aby to osiągnąć, zalecaną praktyką projektową jest ograniczenie długości odgałęzień w sieci do minimum i terminowanie najdalszego węzła. Jeśli sygnał może podróżować w obu kierunkach, oba końce sieci muszą być zakończone odpowiednim terminatorem.
Terminacja krańców magistrali jest skuteczną metodą poprawy jakości sygnału. Jak pokazano na rysunkach 1 i 2, zazwyczaj oba węzły końcowe są zakończone rezystorami końcowymi, których wartość odpowiada impedancji charakterystycznej przewodów transmisyjnych. W niektórych zastosowaniach, takich jak automatyka budynkowa (systemy wentylacji, termostaty itd.), można dodawać lub usuwać węzły z sieci RS-485 w celu jej rekonfiguracji. Prowadzi to do drugiego i trzeciego problemu dla projektantów systemów – płytki aplikacyjne dla węzłów końcowych muszą być zaprojektowane inaczej niż dla węzłów środkowych, a technik musi ręcznie konfigurować każdy moduł, w celu rekonfiguracji terminacji w sieci, co jest podatne na błędy ludzkie, takie jak np. odwrócenie biegunowości przewodów podłączeniowych, niewłaściwa terminacja sieci itp.
Długość sieci, przepustowość danych i ślepe odnogi sieci
Standard RS-485 zapewnia pewne wytyczne dotyczące wyboru maksymalnej szybkości transmisji danych i długości sieci, jak pokazano na rysunku 4. Zależność między długością kabla a szybkością przesyłania sygnału określono dla różnych poziomów tolerowanego szumu fazowego sygnału (jitter). Linia ciągła to zachowawcze oszacowanie dla sygnału w zasadzie bez jittera. Długość sieci można zwiększać, jeśli system jest w stanie tolerować wyższy jitter w sygnale (5%, 10% i 20% jittera dla krzywych pokazanych na wykresie), a jednocześnie nadal jest w stanie prawidłowo rozróżnić wysokie i niskie bity.
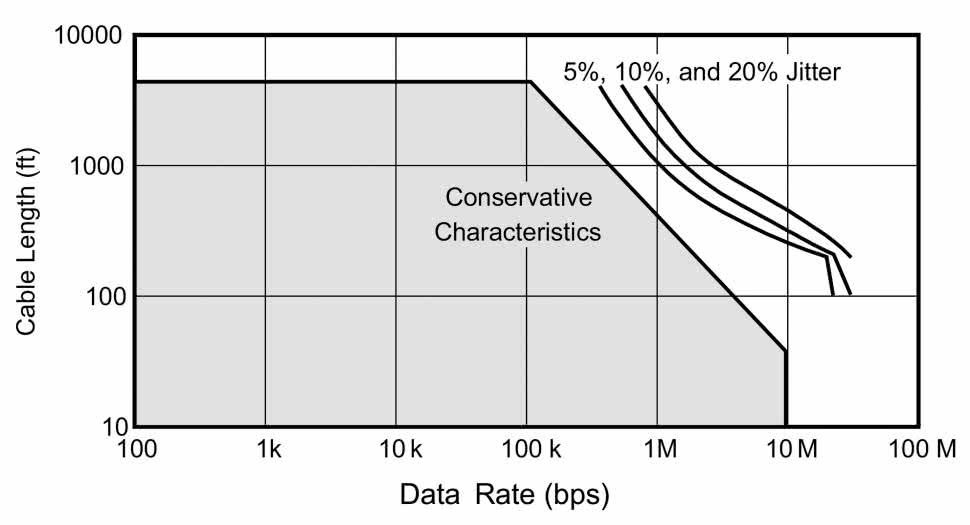
Przy mniejszych prędkościach transmisji danych rezystancja stałoprądowa kabla ogranicza maksymalną długość sieci, ponieważ rezystancja kabla tłumi sygnał. Wraz ze wzrostem częstotliwości sygnału właściwości zmiennoprądowe kabla i czasy narastania i opadania sygnału pochodzącego z drivera zaczynają ograniczać wielkość sieci w zależności od założonej prędkości lub odwrotnie.
Po podjęciu decyzji o długości sieci i operacyjnej szybkości transmisji danych dla sieci RS-485, kolejnym zadaniem jest określenie maksymalnej długości odgałęzienia w celu utrzymania dobrej jakości sygnału. Zgodnie z ogólną konserwatywną wytyczną zaleca się, aby długość elektryczna lub opóźnienie (w obie strony) odgałęzienia były mniejsze niż jedna dziesiąta czasu narastania sygnału ze sterownika, co daje maksymalną fizyczną długość odgałęzienia, jak pokazano w równaniu 2.

gdzie:
- tr to czas narastania wyjścia sterownika od 10% do 90% wartości,
- c to prędkość światła (3×108 m/s),
- v to prędkość sygnału w przewodzie lub ścieżce jako ułamek prędkości c.
Typowo v dla przewodów sieciowych (Cat3...Cat7) zawiera się w zakresie od około 60% do 80%. Parametr ten jest na ogół podawany w karcie katalogowej danego przewodu.
Prowadzi to projektantów systemów do czwartego problemu – wyboru różnych urządzeń do ich projektów sieci o małej lub dużej szybkości oraz... do jego rozwiązania.
Rozwiązania dyskretne do kluczowania terminacji i dupleksowania
Projektanci systemów, próbując zaprojektować uniwersalną płytkę PCB z przełączalnym rezystorem terminatora, aby ta sama płytka PCB mogła być używana we wszystkich punktach sieci RS-485, mogą stosować przekaźniki optyczne, takie jak Opto-MOS. Elementy opto-MOS reagują na logiczny sygnał wejściowy i włączają lub wyłączają przełącznik półprzewodnikowy o niskiej rezystancji. Zasadniczo jest to funkcjonalne połączenie klucza MOSFET z transoptorem, zapewniającym izolację galwaniczną. Izolacja optyczna umożliwia pracę szyn interfejsu z dowolnym napięciem współbieżnym, niezależnie od sygnału odniesienia. Rysunek 5 pokazuje to rozwiązanie i rozszerza je o ideę przełącznika dupleksowości, co oznacza, że przy użyciu dwóch dodatkowych opto-MOS można zbudować rozwiązanie, które może działać jako half- oraz full-duplex, z włączoną lub wyłączoną terminacją.
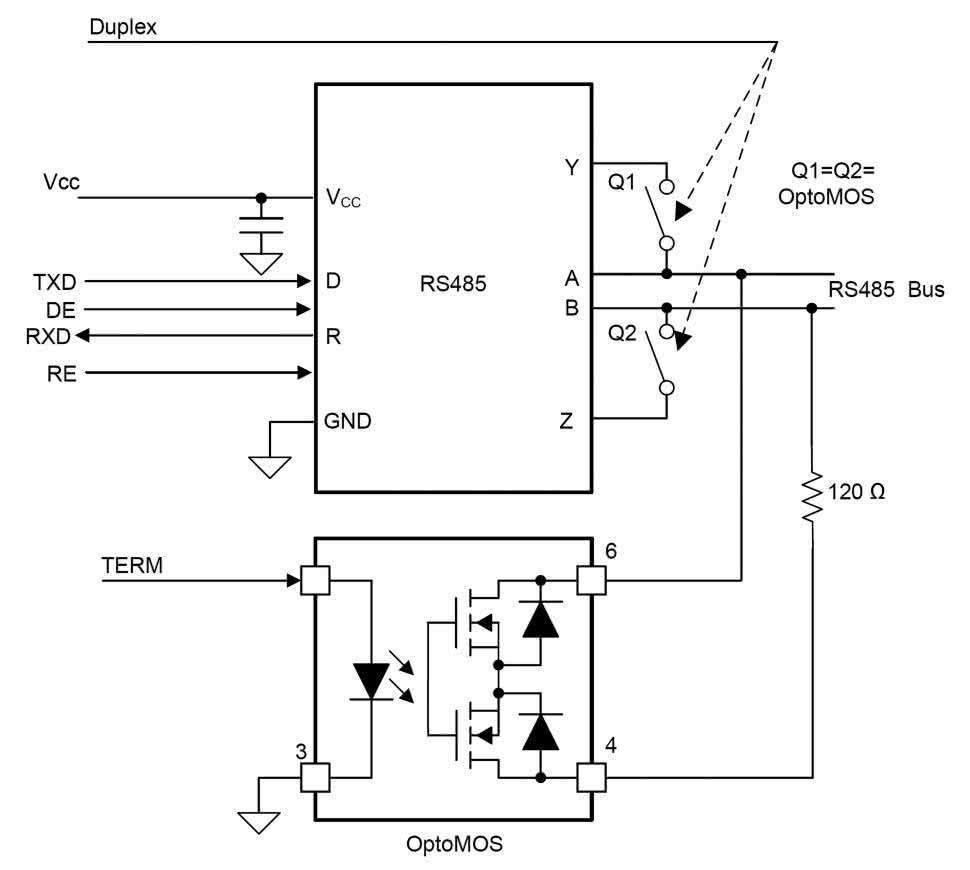
Problem z powyższym rozwiązaniem polega jednak na tym, że zajmuje ono znaczną powierzchnię płyty i jest drogie. Układ taki potrzebuje, oprócz samego transceivera (który zawsze musi być full-duplex, nawet jeśli nie jest to stosowane) trzy dodatkowe układy w postaci izolowanych galwanicznie kluczy MOSFET (opto-MOS).
Dyskretne przełączanie dupleksowania
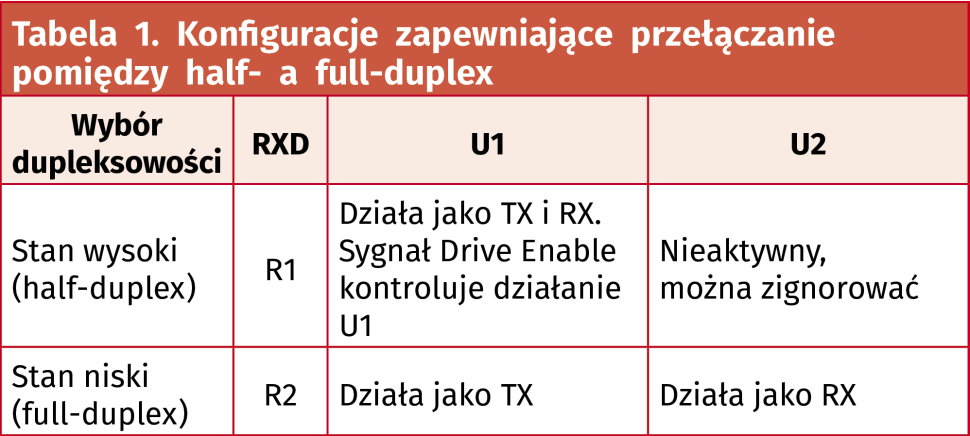
Alternatywna implementacja dyskretna dla rozwiązania, które może działać jako transceiver half- lub full-duplex sterowany pinami, polega na użyciu dwóch transceiverów half-duplex i dobudowaniu do nich logiki, jak pokazano na rysunku 6, do przesyłania i odbierania danych w sieciach dwu- lub czteroprzewodowych.
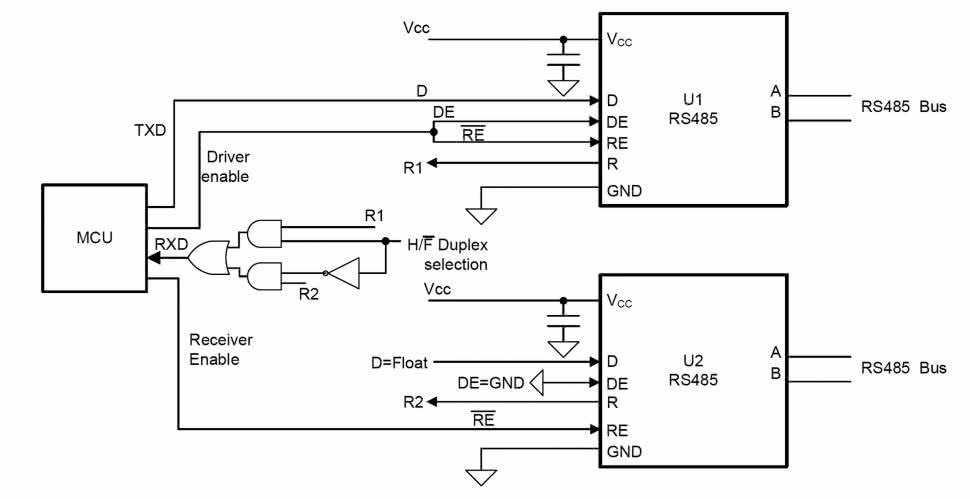
W tabeli 1 opisano stan układów dla obu konfiguracji. Z tym rozwiązaniem jest taki sam problem, jak z poprzednim, dyskretnym rozwiązaniem, zawierającym klucze Opto-MOS. Zajmuje ono sporo miejsca na płytce z uwagi na użycie dwóch scalonych transceiverów oraz dodatkowej logiki sterującej – łącznie co najmniej 4 układy scalone w tej sekcji.
Elastyczne interfejsy RS-485 z układem THVD1424
Wszystkie problemy opisane w powyższych sekcjach mają jedno proste rozwiązanie, którym może być układ THVD1424 firmy Texas Instruments. Jak twierdzi producent, ma to być pierwszy na tym sektorze rynku prawdziwie elastyczny transceiver RS-485. Jest wyposażony w konfigurowalny terminator 120 Ω na pinach każdej z magistral – drivera i odbiornika, sterowane pinami przełączanie dupleksowości oraz kontrolę prędkości narastania i obadania zboczy w sygnale. Pozwala to na programową kontrolę konfiguracji interfejsu RS-485, dzięki czemu można wdrożyć identyczny moduł dla wszystkich typów sieci i we wszystkich jej punktach.
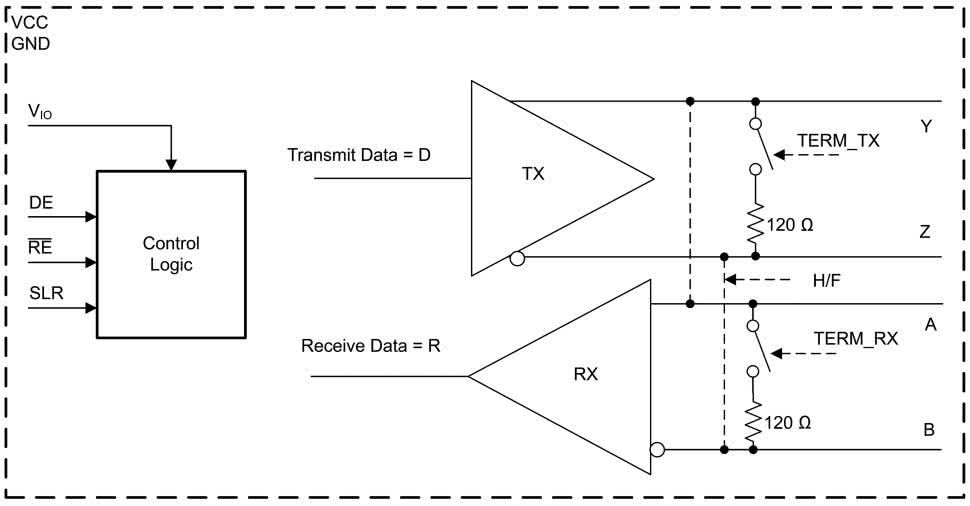
Układ może być używany w sieciach RS-485 typu half-duplex lub full-duplex, konfiguracja realizowana jest pinem H/F. Pin SLR układu służy do kontroli szybkości narastania. Może służyć do ustawienia urządzenia w trybie maksymalnej prędkości – 20 Mb/s – lub w trybie ograniczonej szybkości narastania dla prędkości do 500 kb/s. Terminatory sieci są sterowane za pomocą dwóch pinów TERM_TX i TERM_RX.
Układ ten ma również możliwość współpracy z mikrokontrolerami niskonapięciowymi dzięki obecności oddzielnego pinu VIO dla napięcia interfejsu mikrokontrolera, który przyjmuje zasilanie od 1,65 V do 5,5 V. Napięcie zasilania magistrali VCC może być niezależne od VIO i pozwala na zasilanie układu napięciem od 3 V do 5,5 V. Wszystkie te funkcje są umieszczone w niewielkiej obudowie 16-VQFN o wymiarach 3×3 mm, zapewniającej sprawne odprowadzanie ciepła z układu.
Inne funkcje tego układu to:
- rezystor terminujący magistralę może być włączany lub wyłączany na stykach magistrali niezależnie od stanu włączenia/wyłączenia sterownika lub odbiornika;
- terminatory utrzymują swoje parametry niezależnie od napięcia zasilania (od 3 do 5,5 V), napięcia współbieżnego magistrali (od –7 V do 12 V) i temperatury (od –40 do 125°C);
- urządzenie może pracować z zasilaniem 3,3 V lub 5 V;
- odbiorniki zapewniają 1/8 jednostki obciążenia, co pozwala na konstrukcję sieci obsługującej 256 węzłów na magistrali;
- odbiornik jest odporny na awarie magistrali, takie jak rozwarcie, zwarcie czy bezczynność magistrali;
- zabezpieczenie przed ESD na stykach magistrali zgodne z IEC 61000-4-2, poziom 4: ±8 kΩV wyładowanie stykowe oraz ±15 kΩV wyładowanie przez powietrze;
- filtr zakłóceń w torze odbiorczym dla trybu małej prędkości w celu odfiltrowania szybkich impulsów (szumu);
- rozszerzony przemysłowy zakres temperatur pracy: od –40 do 125°C;
- zintegrowane zabezpieczenia, takie jak ograniczenie prądu zwarciowego magistrali, wyłączenie termiczne i zasilanie podnapięciowe.
Schematy implementacji THVD1424
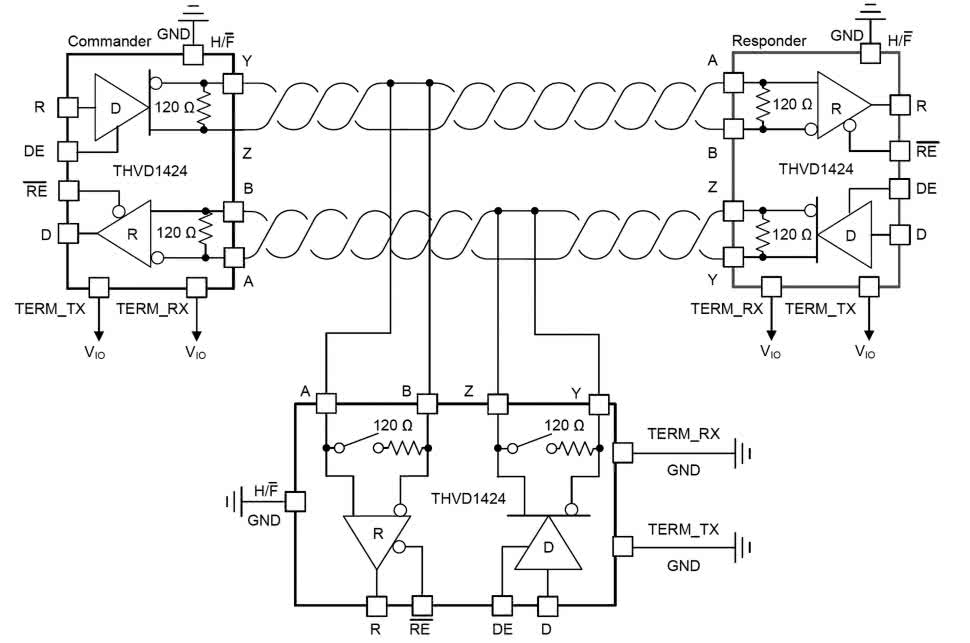
Na rysunkach 8 i 9 pokazano, jak wszechstronny może być omawiany nadajnik.
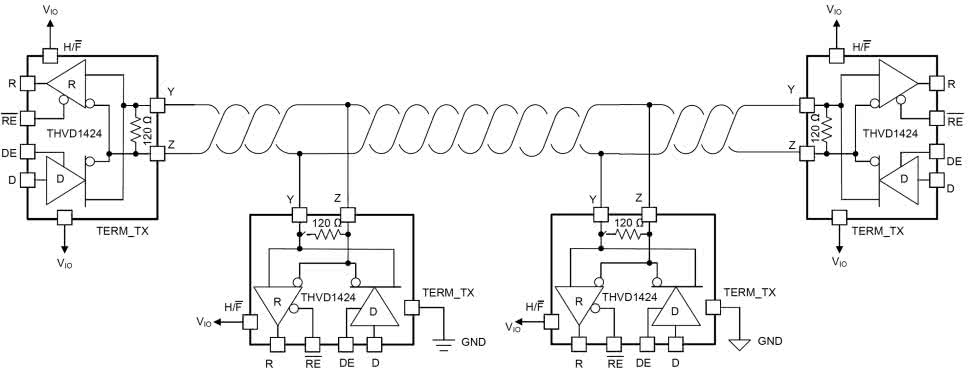
Schematy sieci pokazują, jak układ pasuje zarówno do sieci half-duplex, jak i full-duplex. Ten sam projekt płytki jest powielany we wszystkich pozycjach za pomocą samej konfiguracji oprogramowania. Eliminuje to potrzebę ręcznej interwencji w celu ponownej konfiguracji terminacji, ponieważ może to być obsługiwane przez oprogramowanie.
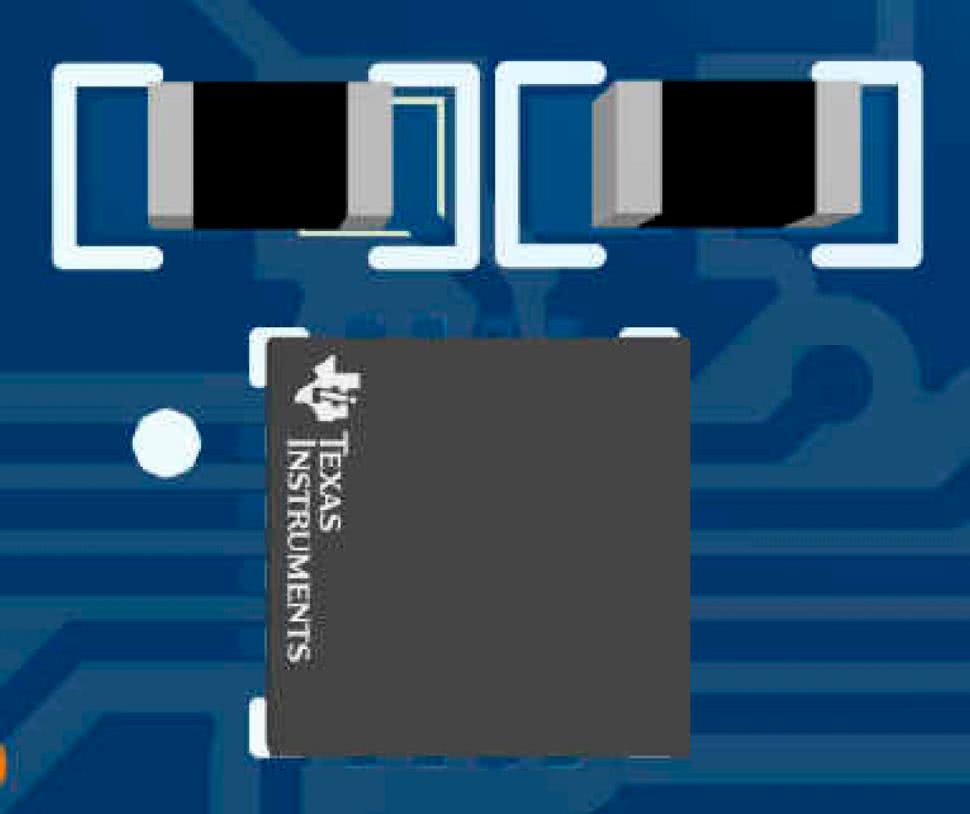
THVD1424 potrzebuje tylko dwóch kondensatorów filtrujących zasilanie o pojemności 1 μF na pinach zasilających VCC i VIO, aby poprawnie działać, zapewniając w ten sposób niezwykle kompaktową konstrukcję. Wszystkie piny logiczne, które mogą być podłączone na stałe do zasilania lub masy, znajdują się po bokach obudowy. Wszystkie cztery styki magistrali znajdują się po jednej stronie obudowy, aby umożliwić ergonomiczny projekt płytki drukowanej. Wizualizacja projektu płytki (fragment z omawianym układem) z kondensatorami filtrującymi został pokazany na rysunku 10.
Wyniki testów eksperymentalnych sieci z czterech THVD1424
Czterowęzłowa sieć half-duplex została zbudowana przy użyciu skrętki dwużyłowej o długości 15,2 metra i czterech kart z układami THVD1424 połączonych w sposób pokazany na rysunku 11.
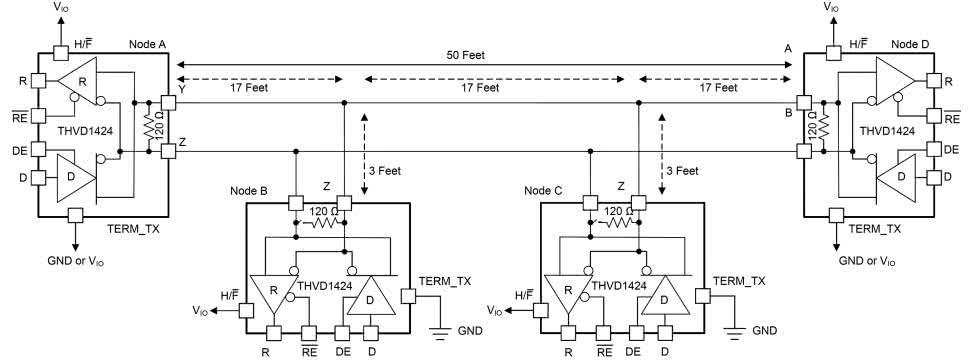
Idealną topologią dla sieci wielopunktowej jest łańcuch, jednak zbudowana tutaj sieć ma bardziej typową topologię magistrali z odgałęzieniami, co pozwala jednocześnie pokazać wpływ długich odgałęzień na pogorszenie jakości sygnału. Każdy węzeł sieci został podłączony do zasilania z napięcia 5 V, a masa była wspólna dla wszystkich węzłów. Węzeł B był sterowany za pomocą generatora funkcji, a przebiegi magistrali zostały sprawdzone w węźle A.
Przypadek 1
Pin kontroli prędkości narastania (SLR) dla każdego węzła został podłączony do masy, aby sprawdzić wpływ terminacji przy dużej prędkości. Węzeł B pracuje z prędkością 2 Mb/s (rysunek 12).
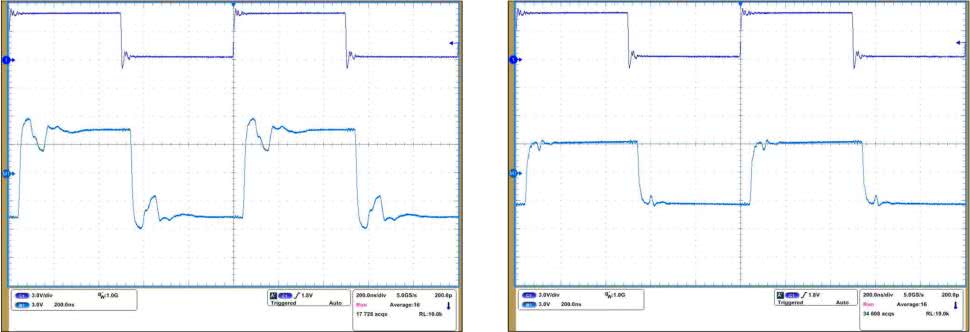
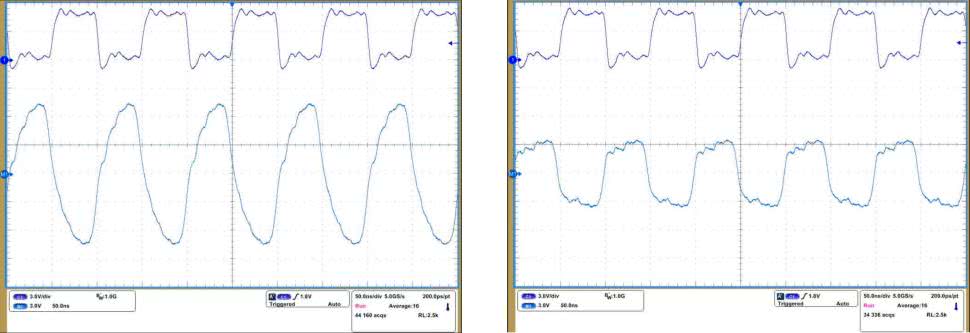
Przypadek 2
Węzeł B pracuje z szybkością 10 Mb/s (rysunek 13).
Przypadek 3
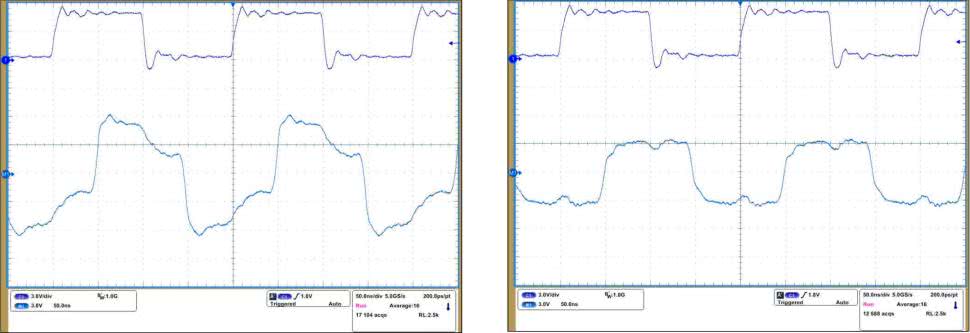
Węzeł B pracuje z szybkością 20 Mb/s (rysunek 14).
Przypadek 4
Pin SLR został ustawiony w stan wysoki dla wszystkich węzłów, a węzeł B działał z szybkością 500 kb/s (rysunek 15).
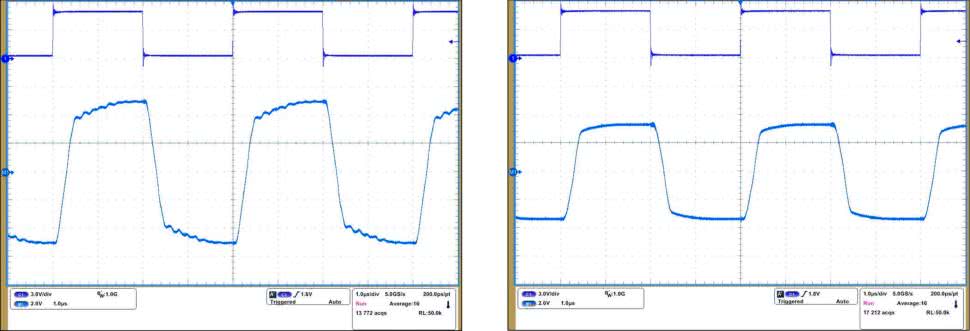
Jak pokazano na powyższych przebiegach, terminacja obu końców sieci znacznie poprawia kształty fali w magistrali poprzez zmniejszenie odbić. Chociaż 500 kb/s to znacznie mniejsza prędkość, a terminacja staje się opcjonalna przy małych prędkościach i na tej odległości, obecność terminacji nadal poprawia przebieg sygnału w tak skonfigurowanej magistrali.
Uwaga – przebiegi magistrali z terminacją mają mniejszą amplitudę, co jest zgodne z oczekiwaniami, ponieważ wyjście różnicowe nieobciążonego sterownika zbliża się do napięcia zasilania, a zatem jest wyższe niż wyjście obciążonego drivera. Długość odcinka pośredniczącego do magistrali jest celowo utrzymywana jako wyższa, niż można by napotkać w rzeczywistych sieciach dla tych czasów przejścia (ok. 10 ns – typowe dla sterownika ustawionego w trybie 20 Mb/s). Dodatkowo pamiętać należy, że sieć o takiej długości przy szybkości transmisji na poziomie 20 Mb/s będzie działać nieco gorzej z powodu strat w przewodach dla prądu przemiennego, dlatego przebiegi nawet w warunkach idealnych (z terminacją) nie są idealne.
Podsumowanie
Układ THVD1424 oferuje ciekawe rozwiązanie pewnych problemów, z jakimi borykają się często projektanci systemów korzystających z sieci sterującej z interfejsem RS-485. Omawiany układ pozwala, bez zwiększania miejsca na płytce drukowanej lub kosztu rozwiązania, zapewnić pełną elastyczność, z możliwością programowego przełączania pomiędzy interfejsem half- a full-duplex czy kontrolą terminacji. Gdy projektant systemu przetestuje i zakwalifikuje urządzenie, jest ono gotowe do użycia we wszystkich obecnych, jak i przyszłych platformach projektowych, co znacznie zmniejsza koszty i czas opracowywania nowych rozwiązań oraz przyspiesza czas wprowadzenia nowych systemów na rynek.
Nikodem Czechowski, EP
Bibliografia:
- Vikas Kumar Thawani, Mani Bhushan Ray, Reduce System Design Time and Cost with Flexible RS-485 Transceivers, Texas Instruments Technical White Paper SLLA595B, styczeń 2023,
- https://www.ti.com/product/THVD1424,
- Kankan Wang, Hao Liu, RS-485 Basics Series, Texas Instruments Technical White Paper, SLLA545, luty 2021.












