Zaloguj
Zaloguj



Do tej pory pracowaliśmy na wersji systemu thud i ekosystemie 1.2.0, natomiast najnowsza dostępna wersja w chwili pisania tego artykułu to dunfell z ekosystemu 2.1.0. Budowanie nowej wersji systemu wygląda analogicznie jak poprzednia, jednak należy pamiętać o aktualizacji wszystkich używanych komponentów. W pierwszej kolejności powinniśmy upewnić się, że mamy najnowszą dostępną wersję narzędzia repo, które z kolei wymaga zainstalowanego pythona w wersji co najmniej 3.6. Najnowsze repo możemy pobrać ze strony projektu i umieścić w katalogu /usr/bin pamiętając o nadaniu mu uprawnień do wykonywania:
wget https://storage.googleapis.com/git-repo-downloads/reposudo mv repo /usr/bin/reposudo chmod a+x /usr/bin/repo
Teraz możemy powtórzyć omawiane wcześniej kroki kompilacji systemu OpenSTLinux, tym razem dla wersji dunfell:
cd <working directory path>/Distribution-Packagemkdir openstlinux-5.4-dunfell-mp1-20-11-12cd openstlinux-5.4-dunfell-mp1-20-11-12repo init -u https://github.com/STMicroelectronics/oe-manifest.git -b refs/tags/openstlinux-5.4-dunfell-mp1-20-11-12repo synccd layers/meta-stgit clone -b dunfell https://github.com/SoMLabs/openst-meta-somlabs.git meta-somlabscd ../../
Szczegóły dotyczące nowego ekosystemu można znaleźć na stronie wiki ST: http://bit.ly/3kzOBGh. Główne zmiany w stosunku do wersji thud dotyczą aktualizacji jądra oraz u-boota.
Dunfell oferuje je odpowiednio w wersjach 5.4.56 i 2020.01. Modyfikacjom uległa również warstwa meta-somlabs. W wersji dunfell, jądro oraz u-boot pobierane są z repozytoriów na stronie http://bit.ly/3dLunHX. Dostępne tam źródła zawierają już niezbędne łaty dla modułów VisionSOM, dzięki czemu nie są one już potrzebne w plikach warstwy. Repozytoria te są definiowane w plikach bbappend jądra i u-boota: recipes-kernel/linux/linux-stm32mp_5.4.bbappend oraz recipes-bsp/u-boot/u-boot-stm32mp_2020.01.bbappend. Oprócz tego, w warstwie meta-somlabs są dostępne używane podczas kompilacji pliki konfiguracyjne jądra i u-boota, dzięki czemu można dodać wymagane opcje bez potrzeby zmieniania źródeł, co miało miejsce w przykładach z poprzedniego odcinka.
Na koniec warto wspomnieć, że zmieniły się też nazwy dostępnych urządzeń, ponieważ wprowadzona została obsługa pamięci eMMC. Możemy więc zbudować system dla modułu z pamięcią eMMC lub SD i jednym z interfejsów wyświetlacza: DSI lub RGB:
stm32mp157a-visionsom-rgb-emmc-mxstm32mp157a-visionsom-rgb-sd-mxstm32mp157a-visionsom-dsi-emmc-mxstm32mp157a-visionsom-dsi-sd-mx
Budowanie nowej wersji systemu OpenSTLinux
W przykładzie użyjemy modułu z pamięcią SD i wyświetlaczem RGB. Wywołujemy więc następujące polecenia, które rozpoczynają budowanie obrazu systemu:
DISTRO=openstlinux-weston MACHINE=stm32mp157a-visionsom-rgb-sd-mx source layers/meta-st/scripts/envsetup.shbitbake st-image-weston
Podobnie jak poprzednio, musimy użyć skryptu tworzącego obraz dla karty SD, jednak tym razem musimy użyć konfiguracji trusted, która jest od tej pory jedyną dostępną:
cd tmp-glibc/deploy/images/stm32mp157a-visionsom-rgb-sd-mx./scripts/create_sdcard_from_flashlayout.sh ./flashlayout_st-image-weston/trusted/FlashLayout_sdcard_stm32mp157a-visionsom-rgb-sd-mx-trusted.tsv
Plik obrazu możemy skopiować na kartę SD poleceniem dd:
sudo dd if=FlashLayout_sdcard_stm32mp157a-visionsom-rgb-sd-mx-trusted.raw of=/dev/sdX bs=1M
Obsługa Cortex-M4
W pierwszej części cyklu przygotowaliśmy program w języku C, który był następnie uruchamiany w systemie Linux działającym na rdzeniu aplikacyjnym Cortex-A7. Tym razem przekonamy się w jaki sposób uruchomić rdzeń Cortex-M4, a następnie załadować i uruchomić przygotowaną dla niego aplikację.
Zmiany opisane w tym rozdziale można wprowadzić korzystając z opisanego projektu openst-cube-mx dla STM32CubeMX, jednak tym razem musimy pamiętać o pobraniu wersji dunfell z repozytorium:
git clone https://github.com/SoMLabs/openst-cube-mx.git -b dunfell
Konfiguracja Cortex-M4 sprowadza się do dodania odpowiednich wpisów w device tree. Musimy uzupełnić sekcję m4_rproc z pliku CA7/DeviceTree/VisionSOM-rgb-sd/kernel/stm32mp157a-visionsom-rgb-sd-mx.dts projektu openst-cube-mx, w której definiujemy m.in. obszary pamięci oraz tzw. skrzynki pocztowe dzięki którym aplikacja na Cortex-M4 będzie komunikować się z systemem Linux. Wpis został pokazany na listingu 1.
&m4_rproc{
status = "okay";
/* USER CODE BEGIN m4_rproc */
memory-region = <&retram>, <&mcuram>, <&mcuram2>,
<&vdev0vring0>, <&vdev0vring1>, <&vdev0buffer>;
mboxes = <&ipcc 0>, <&ipcc 1>, <&ipcc 2>;
mbox-names = "vq0", "vq1", "shutdown";
interrupt-parent = <&exti>;
interrupts = <68 1>;
wakeup-source;
/* USER CODE END m4_rproc */
m4_system_resources{
status = "okay";
/* USER CODE BEGIN m4_system_resources */
/* USER CODE END m4_system_resources */
};
};
Kolejnym krokiem jest dodanie dopisanych przed chwilą obszarów pamięci do sekcji reserved memory w tym samym pliku, tak jak zostało to pokazane na listingu 2.
reserved-memory {
#address-cells = <1>;
#size-cells = <1>;
ranges;
/* USER CODE BEGIN reserved-memory */
fb_reserved: fb@fd000000 {
reg = <0xfd000000 0x8000000>;
no-map;
};
mcuram2: mcuram2@10000000 {
compatible = "shared-dma-pool";
reg = <0x10000000 0x40000>;
no-map;
};
vdev0vring0: vdev0vring0@10040000 {
compatible = "shared-dma-pool";
reg = <0x10040000 0x1000>;
no-map;
};
vdev0vring1: vdev0vring1@10041000 {
compatible = "shared-dma-pool";
reg = <0x10041000 0x1000>;
no-map;
};
vdev0buffer: vdev0buffer@10042000 {
compatible = "shared-dma-pool";
reg = <0x10042000 0x4000>;
no-map;
};
mcuram: mcuram@30000000 {
compatible = "shared-dma-pool";
reg = <0x30000000 0x40000>;
no-map;
};
retram: retram@38000000 {
compatible = "shared-dma-pool";
reg = <0x38000000 0x10000>;
no-map;
};
/* USER CODE END reserved-memory */
};
Na koniec uruchamiamy IPCC do komunikacji pomiędzy rdzeniami dodając do device tree sekcję &ipcc na końcu pliku pomiędzy znacznikami USER CODE, tak jak na listingu 3.
&ipcc {
status = "okay";
};
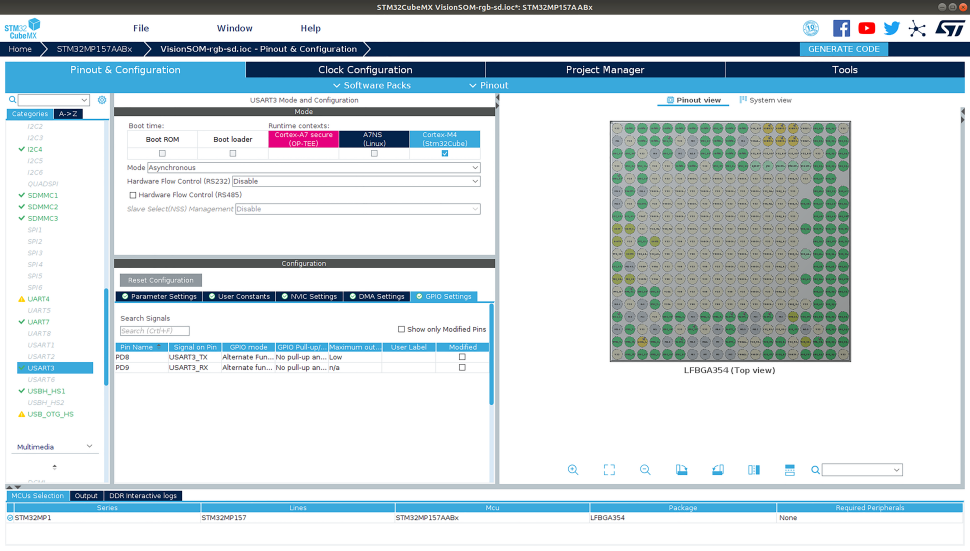
Skonfigurowany w ten sposób rdzeń Cortex-M4 będzie w stanie wykonać skompilowaną dla niego aplikację, jednak aby móc skorzystać z jakiegokolwiek peryferium musimy uruchomić je, tak jak poprzednim razem, jednak tym razem przydzielając je do rdzenia Cortex-M4. W przykładzie użyjemy portu USART3, który musimy skonfigurować używając narzędzia STM32CubeMX tak jak zostało to pokazane na rysunku 1.
Tak przygotowane pliki device tree możemy skopiować do odpowiedniego miejsca w katalogu warstwy meta-somlabs (meta-somlabs/mx/visionsom-rgb-sd-mx) podmieniając znajdującą się tam konfigurację domyślną. Po przebudowaniu obrazu i uruchomieniu systemu możemy zweryfikować działanie rdzenia Cortex-M4 używając do tego przygotowanej wcześniej aplikacji demo.
W tym celu musimy pobrać spakowany plik elf i poinformować system aby użył go jako programu dla rdzenia Cortex-M4:
wget https://wiki.somlabs.com/images/9/94/OpenAMP_TTY_echo.zipunzip OpenAMP_TTY_echo.zip -d /lib/firmwarecd /sys/class/remoteproc/remoteproc0echo "OpenAMP_TTY_echo.elf" > firmwareecho start > state
System Linux domyślnie szuka plików z programem dla Cortex-M4 w katalogu /lib/firmware, dlatego to właśnie tam należy rozpakować plik OpenAMP_TTY_echo.elf. Ostatnie z podanych powyżej poleceń uruchamia rdzeń, który po załadowaniu systemu jest domyślnie wyłączony.
Po uruchomieniu przykładu, w terminalu zobaczymy kilka komunikatów świadczących o włączeniu rdzenia Cortex-M4 i utworzeniu dwóch kanałów komunikacji RPMSG (rysunek 2).

Są to specjalnie zdefiniowane obszary pamięci, które służą do wymiany danych pomiędzy rdzeniami aplikacyjnymi pod kontrolą systemu Linux, a rdzeniem czasu rzeczywistego. Z punktu widzenia użytkownika systemu Linux, można traktować je jako zwykłe porty szeregowe. Przekonamy się o tym używając poleceń echo i cat, którymi możemy odpowiednio wysyłać i odbierać dane z każdego z tych portów:
cat /dev/ttyRPMSG0 &echo "Hello Cortex-M4" >/dev/ttyRPMSG0
Dodatkowo, komunikacja pomiędzy rdzeniami w przykładzie jest logowana w systemie i możemy ją odczytać z pliku /sys/kernel/debug/remoteproc/remoteproc0/trace0.
Kompilacja aplikacji dla Cortex-M4
W poprzednim rozdziale uruchomiliśmy gotową aplikację, przygotowaną dla rdzenia Cortex-M4. Teraz zobaczymy w jaki sposób skompilować jej zmodyfikowaną wersję, która dodatkowo będzie używała skonfigurowanego przez nasz wcześniej portu USART3.
Zaczynamy od pobrania pakietu STM32CubeMP1 w wersji 1.3.0 (https://bit.ly/3uA956m) oraz środowiska STM32CubeIDE (http://bit.ly/2XsPWlH) ze strony producenta. W pakiecie STM32CubeMP1 znajdują się gotowe przykłady, które możemy skompilować i uruchomić na rdzeniu Cortex-M4 procesora STM32MP1. My użyjemy projektu o nazwie OpenAMP_TTY_echo, który służył nam do testów w poprzednim punkcie.
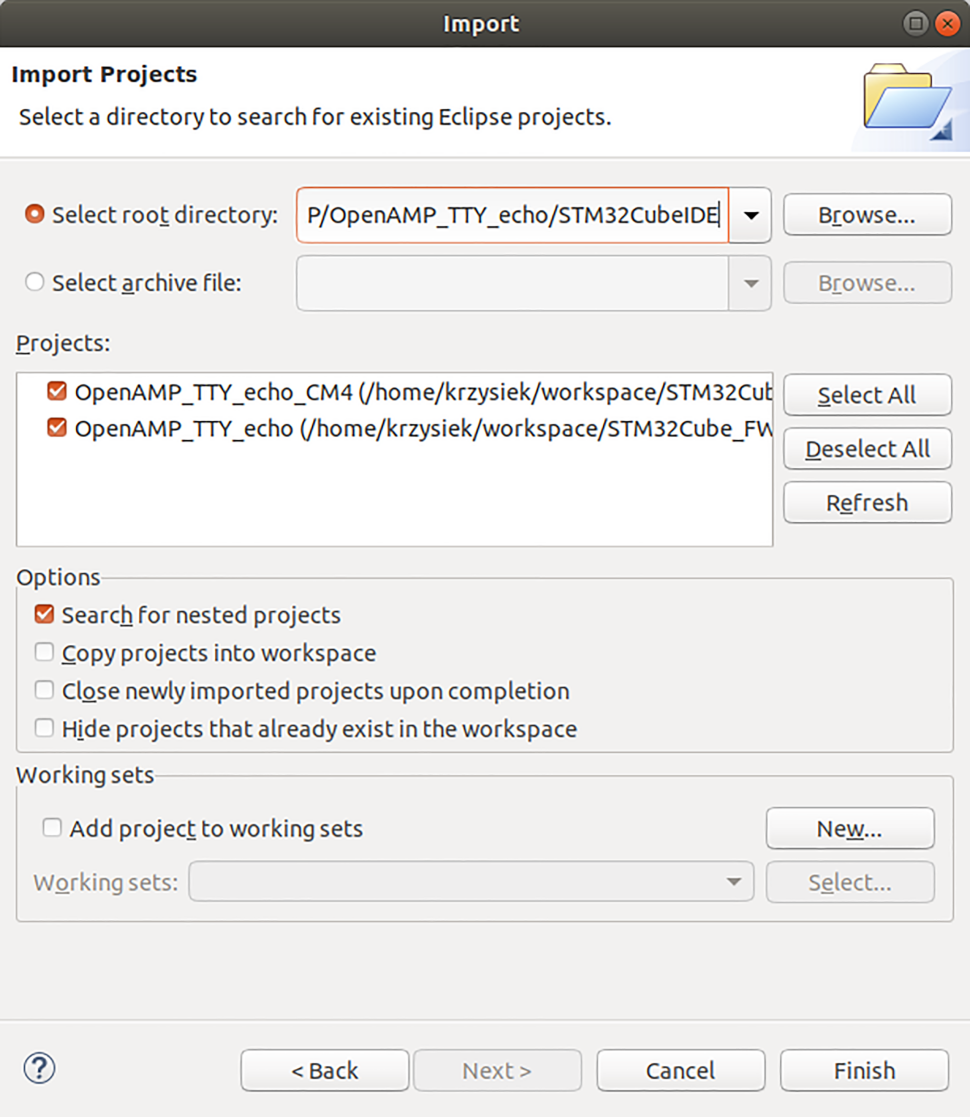
Po zainstalowaniu środowiska STM32CubeIDE importujemy projekt za pomocą opcji File → Import, a następnie wybierając w oknie dialogowym General → Existing Projects into Workspace. W kolejnym oknie musimy wskazać katalog z projektem (STM32Cube_FW_MP1_V1.3.0/Projects/STM32MP157C-DK2/Applications/OpenAMP/OpenAMP_TTY_echo/STM32CubeIDE) tak jak na rysunku 3, a następnie przyciskiem Finish kończymy cały proces.
W kodzie aplikacji są inicjalizowane dwa kanały RPMSG, a następnie rozpoczyna się pętla while, w której otrzymane wiadomości są wysyłane z powrotem na odpowiedni port.
Zmodyfikujemy kod, aby dodatkowo wysyłał dane na port USART3. Na początku będziemy potrzebować funkcji konfigurujących port szeregowy oraz przypisane do niego wyprowadzenia.
Odpowiednie funkcje możemy napisać własnoręcznie, lub skorzystać z kodu wygenerowanego przez narzędzie STM32CubeMX, które oprócz plików device tree, tworzy także kod dla Cortex-M4, który znajdziemy w katalogu CM4 projektu openst-cube-mx/VisionSOM-rgb-sd. Skopiujmy więc funkcje MX_USART3_UART_Init z pliku CM4/Src/main.c oraz HAL_UART_MspInit z pliku CM4/Src/stm32mp1xx_hal_msp.c do pliku main.c w otwartym projekcie w katalogu Application/User.
void MX_USART3_UART_Init(void) {
huart3.Instance = USART3;
huart3.Init.BaudRate = 115200;
huart3.Init.WordLength = UART_WORDLENGTH_8B;
huart3.Init.StopBits = UART_STOPBITS_1;
huart3.Init.Parity = UART_PARITY_NONE;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
huart3.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart3.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart3.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart3) != HAL_OK) {
Error_Handler();
}
if (HAL_UARTEx_SetTxFifoThreshold(&huart3, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK) {
Error_Handler();
}
if (HAL_UARTEx_SetRxFifoThreshold(&huart3, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK) {
Error_Handler();
}
if (HAL_UARTEx_DisableFifoMode(&huart3) != HAL_OK) {
Error_Handler();
}
}
Obie funkcje zostały pokazane na listingach 4 i 5.
void HAL_UART_MspInit(UART_HandleTypeDef* huart) {
GPIO_InitTypeDef GPIO_InitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
if(huart→Instance==USART3) {
if(IS_ENGINEERING_BOOT_MODE()) {
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_UART35;
PeriphClkInit.Uart35ClockSelection = RCC_UART35CLKSOURCE_PCLK1;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK) {
Error_Handler();
}
}
__HAL_RCC_USART3_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF7_USART3;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Alternate = GPIO_AF7_USART3;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
}
}
Na początku pliku main.c musimy także umieścić deklaracje dodanych funkcji i zmienną huart3, co zostało zawarte na listingu 6.
UART_HandleTypeDef huart3;
static void MX_USART3_UART_Init(void);
void HAL_UART_MspInit(UART_HandleTypeDef* huart);
Możemy teraz zmodyfikować funkcję main() dodając wywołanie funkcji konfigurującej port szeregowy oraz przekierowując na niego otrzymane pakiety danych za pomocą funkcji bibliotecznej HAL_UART_Transmit. Wspomniane zmiany są widoczne na listingu 7.
MX_USART3_UART_Init();
while (1) {
OPENAMP_check_for_message();
if (VirtUart0RxMsg) {
HAL_UART_Transmit(&huart3, (uint8_t*)"CM4 RX RPMSG0: ", 8, 1000);
HAL_UART_Transmit(&huart3, VirtUart0ChannelBuffRx, VirtUart0ChannelRxSize, 1000);
VirtUart0RxMsg = RESET;
VIRT_UART_Transmit(&huart0, VirtUart0ChannelBuffRx, VirtUart0ChannelRxSize);
}
if (VirtUart1RxMsg) {
HAL_UART_Transmit(&huart3, (uint8_t*)"CM4 RX RPMSG1: ", 8, 1000);
HAL_UART_Transmit(&huart3, VirtUart1ChannelBuffRx, VirtUart1ChannelRxSize, 1000);
VirtUart1RxMsg = RESET;
VIRT_UART_Transmit(&huart1, VirtUart1ChannelBuffRx, VirtUart1ChannelRxSize);
}
}
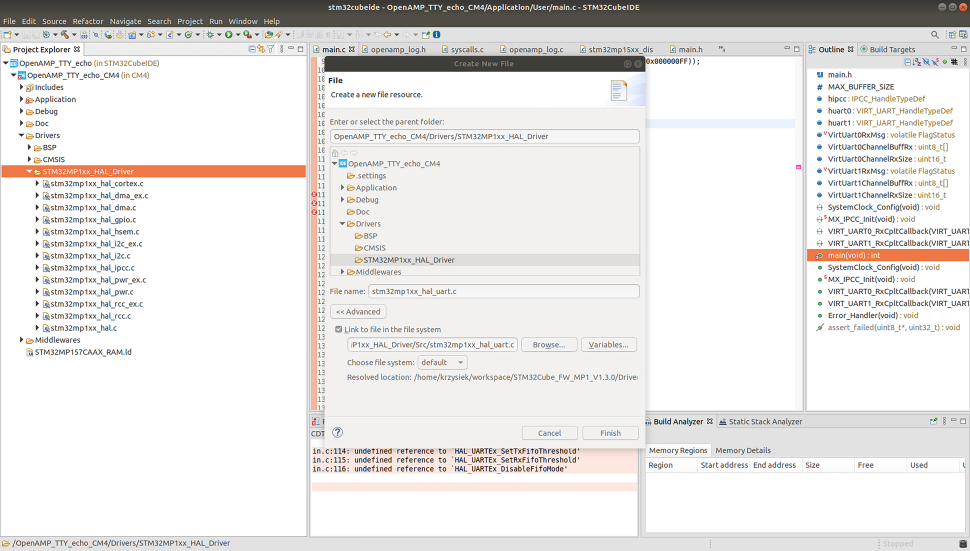
Do poprawnej kompilacji powinniśmy dodać do projektu nagłówki z definicjami i deklaracjami dla portu UART przez odkomentowanie linii #define HAL_UART_MODULE_ENABLED w pliku Inc/stm32mp1xx_hal_conf.h. Musimy także uwzględnić w projekcie niezbędne pliki sterowników z biblioteki STM32Cube – klikamy prawym przyciskiem myszy na katalog STM32MP1xx_HAL_Driver w drzewie projektu po lewej stronie i wybieramy opcję New → File. W oknie dialogowym, które się pojawiło wybieramy opcję Advanced i podajemy ścieżkę do pliku sterownika UART: ${PARENT-7-PROJECT_LOC}/Drivers/STM32MP1xx_HAL_Driver/Src/stm32mp1xx_hal_uart.c, tak jak na rysunku 4. W podobny sposób musimy dodać także plik ${PARENT-7-PROJECT_LOC}/Drivers/STM32MP1xx_HAL_Driver/Src/stm32mp1xx_hal_uart_ex.c.
Teraz możemy przebudować projekt i skopiować plik OpenAMP_TTY_echo_CM4.elf na płytkę VisionSOM. Plik elf znajduje się w katalogu z przykładem: OpenAMP_TTY_echo/STM32CubeIDE/CM4/Debug.
Po uruchomieniu nowej wersji programu na rdzeniu Cortex-M4, wszystkie wiadomości odebrane z kanałów RPMSG0 i RPMSG1 będą również wysyłane na port USART3, którego wyprowadzenia znajdziemy na pinach 8 (TX) i 10 (RX) złącza Raspberry Pi. Efekt działania nowej wersji programu jest widoczny na rysunku 5.
Krzysztof Chojnowski