 Zaloguj
Zaloguj




- roboty przemysłowe,
- roboty wojskowe i policyjne,
- roboty edukacyjne i zabawki,
- roboty eksperymentalne.
Roboty z poszczególnych grup mocno się od siebie różnią i mają zupełnie inne zastosowania, ale mają też wiele elementów wspólnych, w związku z czym doświadczenia, wyniesione z pracy z jednymi z nich, w części da się przenieść na inne.
Największe przychody generują roboty przemysłowe, które są konstrukcjami ulepszanymi przez lata i sprawdzonymi w pracy w trudnych warunkach przemysłowych. To ciężki i drogi sprzęt, któremu do robotów z filmów SF brakuje przede wszystkim mobilności i humanoidalnego wyglądu. Mobilne są natomiast roboty wojskowe i policyjne, ale te nie przypominają Robocopa, tylko marsjańskie łaziki. Urządzenia te produkowane są m.in. w Polsce przez PIAP i coraz chętniej wykorzystywane przez siły porządkowe na całym świecie.
Najciekawszymi robotami są konstrukcje eksperymentalne, które nierzadko mają budowę humanoidalną lub przypominającą wyglądem zwierzęta. Nie są to jednak urządzenia powszechnie dostępne, gdyż nie są na tyle dopracowane, by mogły w sensowny sposób realizować przydatne zadania. Natomiast prace nad takimi maszynami można rozpocząć od stworzenia mniejszych modeli i testowania na nich przygotowywanych algorytmów. Tę właśnie funkcję może pełnić robotyka edukacyjna.
Roboty edukacyjne mogą składać się z takich samych rodzajów komponentów, jak maszyny w dużej skali. Różnica polegać będzie jedynie na rozmiarach, mocach i konsekwencjach ewentualnych pomyłek w konstrukcji.
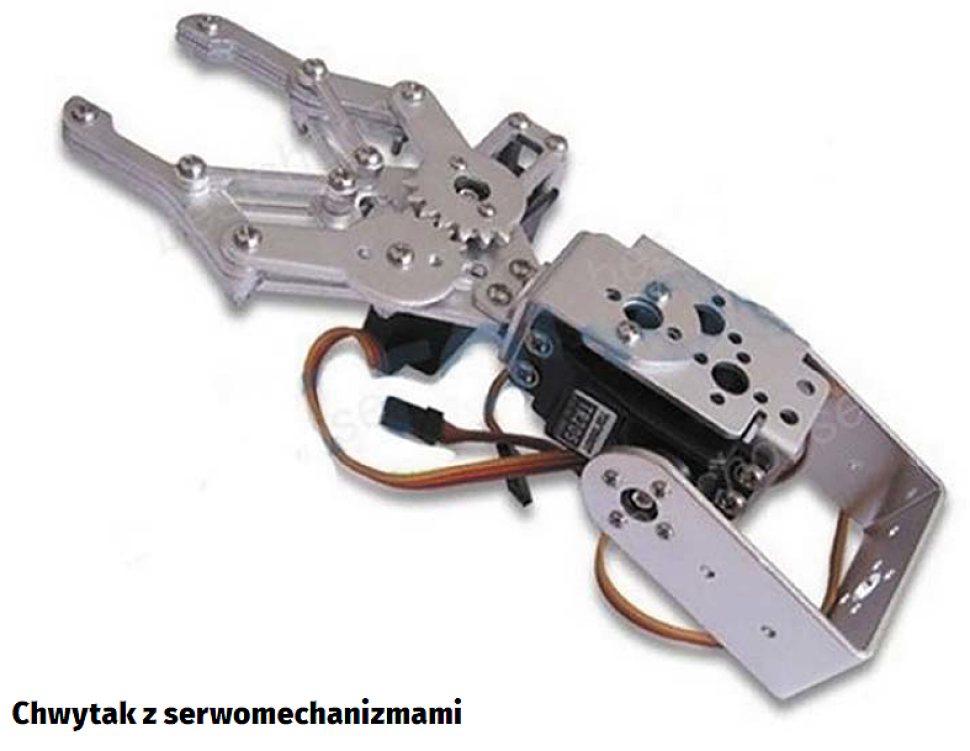
Do budowy robota konieczne są następujące elementy: sterownik, siłowniki lub silniki, elementy mechaniczne konstrukcji oraz przewody. Do tego należy pomyśleć o zapewnieniu zasilania, które może pochodzić z wbudowanego akumulatora lub baterii albo być podłączone przewodem. Ponadto nowoczesne roboty – aby miały pewną samodzielność działania, wyposażane są w różnego rodzaju czujniki. Typowym elementem uzupełniającym są wszelkiego rodzaju uchwyty, które utrzymują przewody wzdłuż ruchomych ramion robota.
Bardzo wygodnym sposobem na sterowanie robotem jest wykorzystanie komunikacji bezprzewodowej. Warto więc wyposażyć robota w układ Bluetooth lub Wi-Fi, za pomocą którego najłatwiej będzie przesyłać komendy do urządzenia.
Poszczególne komponenty będą różniły się w zależności od wielkości robota, przewidywanego środowiska użytkowania oraz w dużej mierze od stopnia jego samodzielności. W przypadku robotów w pełni autonomicznych konieczne będzie wyposażenie ich w szereg czujników oraz odpowiednio wydajny system sterowania, który pozwoli reagować na zdarzenia zachodzące w otoczeniu. Natomiast roboty, które wykonują proste zestawy poleceń, przesyłane zdalnie, nie muszą mieć zbyt wielu czujników, a tym bardziej systemów analizowania zbieranych danych. Te przetwarzać może operator lub zewnętrzny komputer sterujący jedną lub wieloma takimi maszynami jednocześnie.
Silniki
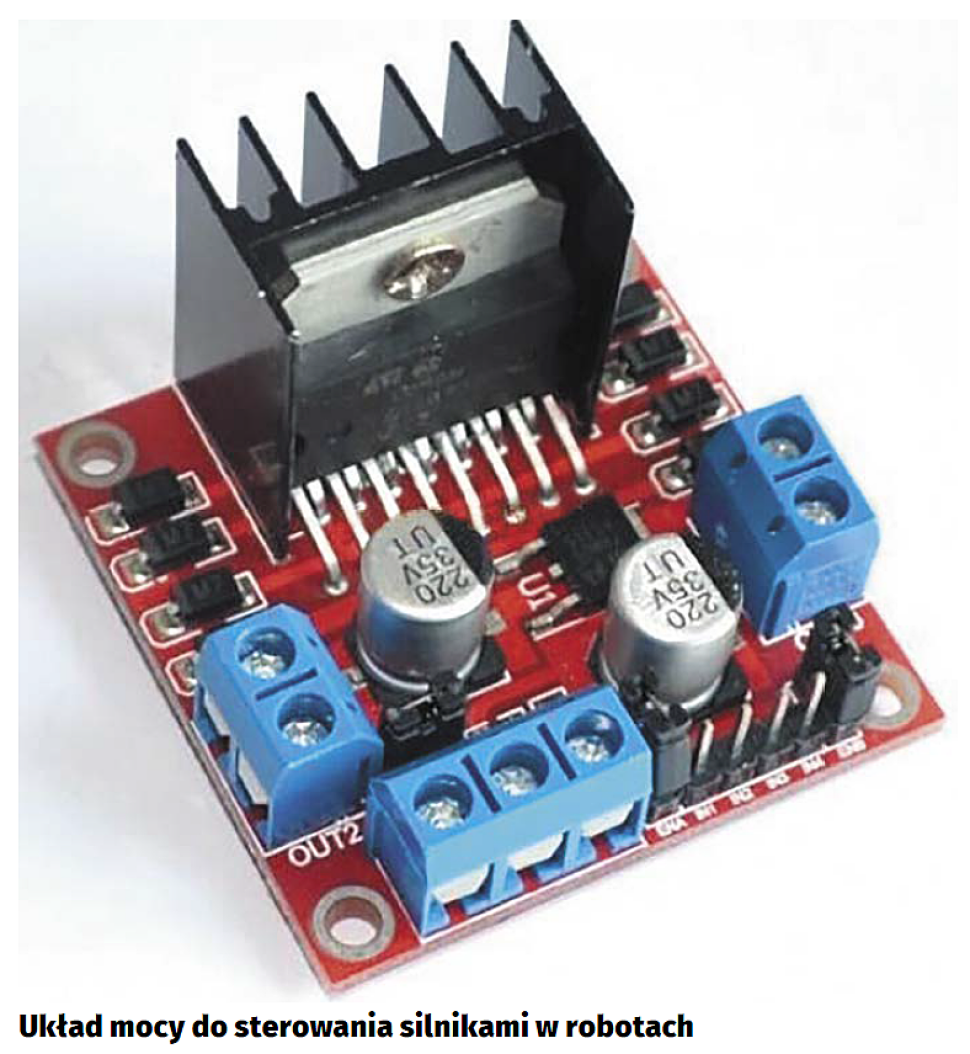
Jako napędy elementów wykonawczych w robotach edukacyjnych stosowane są najczęściej silniki stałoprądowe lub krokowe. Popularnością cieszą się przede wszystkim modele o mocach od kilku do kilkunastu watów. Dobierając taki silnik, należy zwrócić uwagę na jego prędkość obrotową, uzyskiwany moment siły oraz masę własną, by upewnić się, że będzie spełniał pokładane w nim nadzieje. Istotne jest też zwrócenie uwagi na napięcie zasilania (najczęściej 1,5 V, 3 V, 6 V, 12 V lub 24 V, oraz średnicę wałka (od jednego do kilku milimetrów). Najtańsze silniki stałoprądowe można nabyć już za kilka złotych. Najdroższe przeznaczone do modelarstwa są oferowane po kilkaset złotych i mają zaawansowane, precyzyjne przekładnie, minimalizujące straty oraz wydłużające żywotność podzespołu.

Nowoczesna elektronika pozwala robotom samodzielnie widzieć i badać otoczenie. Wykorzystuje się różnorodne miniaturowe sensory. Do wykrywania obiektów wokół robota można użyć np. czujników optycznych lub ultradźwiękowych. Oba działają na zasadzie emisji fal i wykrywania ich odbicia od przeszkód. Można nabyć też gotowe, laserowe skanery, których obrotowa głowica pozwala na wykonywanie szybkich skanów otoczenia, z szybkością kilku – kilkunastu pomiarów na sekundę. Dane są następnie w uproszczony sposób analizowane przez sam moduł czujnika i przesyłane cyfrowym interfejsem do mózgu robota.
Innego rodzaju czujniki raczej nie są używane do wykrywania przedmiotów w otoczeniu, ale wiele innych sensorów ma zastosowanie do monitorowania pozycji i położenia robota lub jego ramion. Przydatne mogą być gotowe enkodery, sensory Halla, akcelerometry, żyroskopy czy nawet (rzadziej) tensometry. Bywa, że wystarczy kontaktron lub przełącznik krańcowy, za pomocą którego można ustalić, czy ramię robota jest wysunięte, czy nie. Można również zbudować bardzo zaawansowanego robota, w którym jednym z czujników będzie kamera, ale będzie to wymagało odpowiednio wydajnego przetwarzania danych.
Jako elementy mechaniczne można wykorzystać różnego rodzaju płytki drukowane oraz klocki. Tanim sposobem na zbudowanie robota będzie użycie elementów zabawek dla dzieci czy właśnie zestawów klocków. Na rynku można też znaleźć klocki specjalnie do tego przeznaczone, takie jak np. Lego Technics.
Wiele robotów mobilnych wymaga instalacji kół. Można je z łatwością dostać w różnych rozmiarach, w wykonaniach w pełni plastikowych lub powleczonych gumą. Montaż kół ułatwiają tuleje, przejściówki i łożyska, które dostępne są w sklepach modelarskich. Częstym problemem jest przeniesienie napędu, ale na szczęście łatwo o różnorodne zębatki. W ofercie sklepów z podzespołami do robotów edukacyjnych znaleźć można również metalowe lub plastikowe sprzęgła dociskowe.
Pozostałe elementy mechaniczne, takie jak dźwignie, łączniki, kątowniki i inne, można w łatwy sposób nabyć spośród uniwersalnych komponentów tego typu. Gdyby jednak specyfika konstrukcji nie pozwala na użycie standardowych elementów, warto sięgnąć po druk 3D. Jego dostępność rośnie i w przypadku pojedynczych maszyn użycie wydrukowanych komponentów będzie pewnie najlepszym, choć nie najłatwiejszym rozwiązaniem. Obudowę – jeśli taka jest potrzebna, również najlepiej wydrukować w 3D – nie tylko będzie najlepiej dopasowana, ale też będzie najlepiej wyglądać.
Sterowanie robotem można zrealizować na kilka sposobów, przy czym w obecnych czasach raczej nie warto tworzyć zupełnie autorskich konstrukcji od zera. Fakt, że maszyna i tak ma się poruszać, a więc zużywać niemało energii, oznacza, że lepiej sięgnąć po gotowe platformy, które może nie będą idealnie zoptymalizowane, ale pozwolą szybko przygotować działające urządzenie.
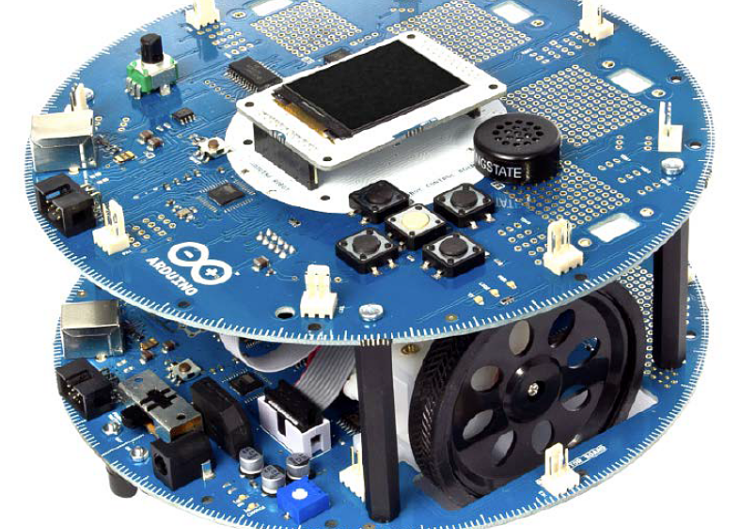
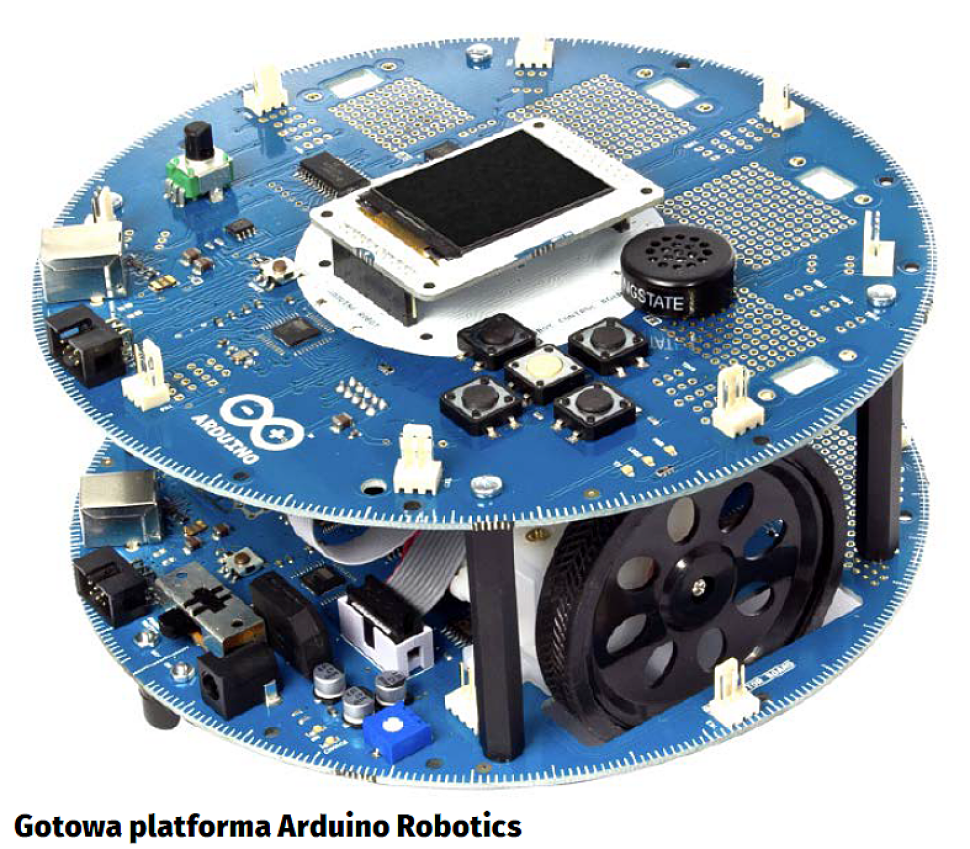
Wybór kontrolera będzie zależał przede wszystkim od zastosowanych czujników. Wszystkie podłączone sensory i elementy wykonawcze musi dać się jakoś obsłużyć, a więc sterownik musi mieć odpowiednio dużo wejść i wyjść. Typowy robot wymaga głównie obsługi sygnałów cyfrowych, choć niektóre czujniki i enkodery zwracają sygnał analogowy. Dużą zmianę w sposobie doboru kontrolera będzie miało użycie kamery. Obraz z niej trzeba albo analizować, albo choćby gdzieś przesyłać. W efekcie, o ile w prostych robotach ze zwykłymi czujnikami warto sięgnąć po Arduino, o tyle w urządzeniach z obrazowaniem lepiej skorzystać z komputera z systemem operacyjnym, takim jak Android lub Linux. Oczywistym wyborem może wydawać się Raspberry Pi, ale na rynku jest wiele innych, alternatywnych komputerków jednopłytkowych, które albo mają większą moc obliczeniową, albo są po prostu mniejsze i lepiej sprawdzą się do sterowania robotem. Warto też rozważyć gotowe platformy i zestawy startowe do robotyki, oferowane przez wielu producentów mikrokontrolerów. Niektóre z nich od razu wyposażone są w koła i czujniki, co ułatwia rozpoczęcie pracy. O ile docelowy robot może być skonstruowany samodzielnie, o tyle wykorzystanie takiej gotowej platformy pozwoli na przetestowanie algorytmów, zanim reszta podzespołów zostanie finalnie dobrana. Układy komunikacyjne warto dobierać pod wybrany zestaw sterujący. Istotne jest, by użyty moduł komunikacyjny był łatwy do oprogramowania, miał zgodne interfejsy i pasował do reszty systemu.

Pozostaje jeszcze kwestia zasilania, której rozwiązanie nie jest łatwe. Wiele podzespołów do robotyki jest przystosowanych do napięć dostępnych z typowych baterii paluszków, podczas gdy platformy sterujące nierzadko wymagają 5 V. Oznacza to, że konieczne staje się albo przygotowanie się na pewne straty i zastosowanie konwerterów napięcia, albo użycie dwóch źródeł zasilania. Ta druga metoda wcale nie jest taka głupia, jaką mogłaby się wydawać. Użycie dwóch niezależnych źródeł zasilania pozwala podzielić funkcje robota na dwie grupy. W efekcie – w przypadku wyczerpania się energii na siłowniki, robot może nadal utrzymywać kontakt z urządzeniem sterującym, poinformować o braku prądu i o swojej pozycji.
Warto też rozważyć użycie akumulatorów, które da się naładować. Popularne jest obecnie używanie uniwersalnych ładowarek USB na napięcie 5 V. Pozwala to ograniczyć problemy związane z częstym wymienianiem baterii.
Podsumowanie
Robotyka to zdecydowanie jedna z dziedzin o bardzo dobrych perspektywach na przyszłość. Wiele wskazuje na to, że w najbliższym czasie będzie się szybko rozwijać, również za sprawą postępów w innych dziedzinach techniki, takich jak np. wirtualna rzeczywistość. Świetnym przykładem czekających nas możliwości jest niedawno zaprezentowany robot załogowy METHOD-1, opracowany przez inżynierów z Korei. Można go obejrzeć na wideo pod adresem https://goo.gl/5X4dy3.
Marcin Karbowniczek, EP












