Oszczędność energii jest bardzo ważną cechą większości produkowanych obecnie urządzeń elektrycznych i nie ogranicza się tylko do sprzętu przenośnego. Projektanci często dbają o energooszczędność poprzez wykorzystywanie różnych trybów pracy cyfrowych podzespołów, a przy okazji bywa, że zapominają o stratach występujących w samych układach zasilania. W artykule pokazujemy, jak korzystając z nowoczesnych układów cyfrowych zaprojektować zaawansowany zasilacz dużej mocy, spełniający wyśrubowane wymagania certyfikatów energooszczędności.
Projektując urządzenia elektroniczne, a szczególnie te zasilane z sieci elektrycznej, często zapominamy o tym jak ważne jest dobranie odpowiedniego zasilacza. Dostępność praktycznie nieograniczonej energii nierzadko sprawia, że zasilacz traktuje się jako idealne źródło napięciowe lub ewentualnie źródło o pewnej ograniczonej rezystancji. Wielu inżynierów nie ma ochoty ingerować w przetwornicę AC/DC swojego urządzenia, ale może okazać się, że to właśnie w jej obszarze jest jeszcze przestrzeń, gdzie można zdobyć przewagę nad konkurencją. Oczywiście, można kupić gotowy zasilacz o odpowiednich parametrach, ale my pokazujemy, jak zbudować go samodzielnie. I choć przedstawiany projekt referencyjny ma moc 720 W, identyczne mechanizmy można wykorzystać także w zasilaczach o innej mocy.
Energy Star CSCI Platinum
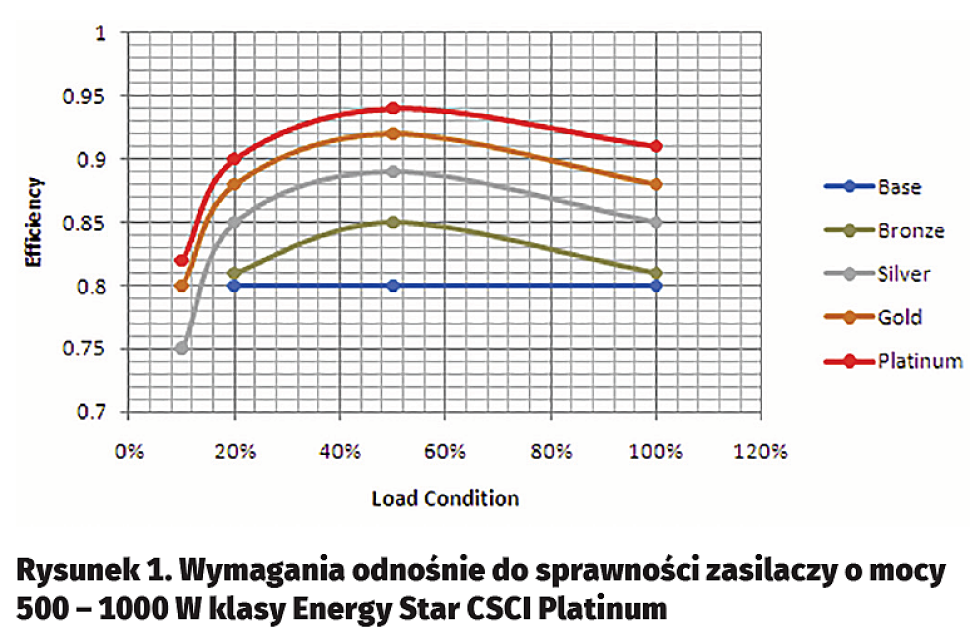
Zacznijmy od określenia, jakie parametry powinien mieć dobry zasilacz. W tym celu można sięgnąć po wytyczne opracowane w ramach programu Energy Star, nadzorowanego przez amerykańską Agencję Ochrony Środowiska (EPA – Environmental Protection Agency). Jakiś czas temu do programu Energy Star dołączyła organizacja non-profit o nazwie Climate Savers Computing Initiative (CSCI), której patronowało Google. CSCI przygotowała 5 kategorii sprawności dla zasilaczy podzielonych na grupy o określonej mocy. Te kategorie to: podstawowa, brązowa, srebrna, złota i platynowa. Dla grupy zasilaczy o mocy od 500 W do 1 kW kategoria podstawowa określa wymagania w zakresie od 20% do 100% obciążenia, a w pozostałych kategoriach kryterium jest zdefiniowane już od obciążenia na poziomie 10%.
Kryteria CSCI dla tej grupy zasilaczy zostały zaprezentowane na rysunku1. Jak można z niego odczytać, zasilacz musi mieć sprawność nie mniejszą niż 82 % dla 10-procentowego obciążenia, nie mniejszą niż 90 % dla 20-procentowego obciążenia, przynajmniej 94 % dla obciążenia 50 % i nie mniej niż 91 % przy pełnym obciążeniu. Poza tym CSCI narzuca jeszcze ograniczenia odnośnie współczynnika mocy zasilacza (rysunek2), co wymaga zastosowania stosownego, aktywnego PFC.
Parametry projektu referencyjnego
Prezentowany projekt referencyjny ma moc znamionową 720 W i generuje napięcie stałe 12 V z napięcia przemiennego (50 Hz – 60 Hz) z zakresu od 90 V do 264 V. Jest w stanie podtrzymać napięcie wyjściowe przez minimum 20 ms w przypadku utraty napięcia sieciowego, dzięki czemu będzie dobrze współpracować z większością UPSów. Jest też zabezpieczony przed zbytnim nagrzaniem się, pozwala na monitorowanie pracy wentylatora i umożliwia zarządzanie poborem mocy dzięki komunikacji poprzez magistralę I2C. Całość mieści się w obudowie rackowej o wysokości 1 U oraz jest przewidziana do niezawodnej pracy przez przynajmniej 50 tysięcy godzin w temperaturze 40°C.
Praca z podziałem na fazy
Duża sprawność i niezawodność oraz zdolność do dostarczenia dużej ilości mocy bez nadmiernego zwiększania wielkości samego zasilacza to trudne do realizacji wymagania. Aby je spełnić konieczne staje się skorzystanie podziału obwodów na równoległe, identyczne sekcje, pracujące z przesunięciem fazowym. Tu zastosowano podział na dwie fazy, przesunięte względem siebie o 180°. Taka topologia ma wiele zalet. Przede wszystkim zmniejszają się tętnienia na wyjściu zasilacza, a przy okazji maleje także temperatura pracy układu. To sprawia, że żywotność komponentów się wydłuża, a sprawność rośnie. Co więcej, ponieważ dzięki podziałowi każda z faz odpowiada za przepływ jedynie połowy całkowitego prądu, straty związane z jego przepływem w poszczególnych elementach maleją czterokrotnie, gdyż są one zależne od kwadratu prądu.
Dodatkową zaletą takich topologii jest możliwość zastosowania mniejszych komponentów – zarówno dławików, jak i transformatorów, ścieżek na płytce drukowanej, tranzystorów, radiatorów i diod. Nawet jeśli trzeba je zduplikować, to dzięki mniejszym wymiarom łatwiej upakować je na płytkach drukowanych.
Schematy blokowe
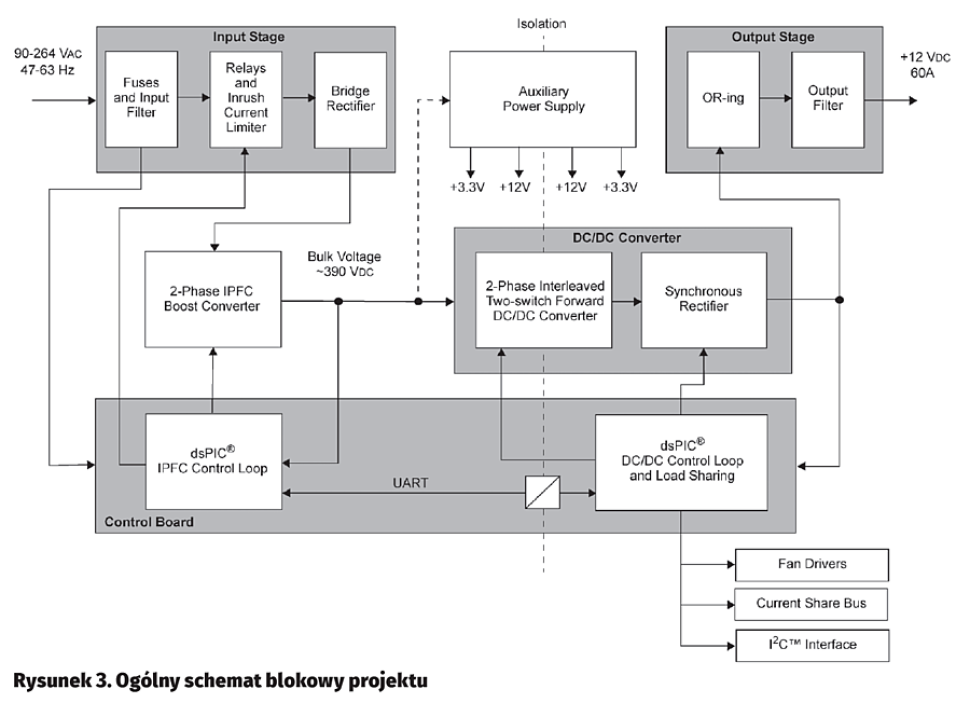
W omawianym projekcie zasilacz podzielono na kilka sekcji, zgodnie z rysunkiem3. Dwufazową topologię zastosowano zarówno w przetwornicy podwyższającej z PFC, jak i w przetwornicy DC/DC poprzedzającej sekcję filtrów wyjściowych.
Napięcie wejściowe przechodzi przez filtry wejściowe. Składają się na nie m.in. dławik i kondensator o pojemności 1 mF, które tłumią interferencje elektromagnetyczne. Po nich prąd przechodzi przez bezpieczniki nadprądowe i warystor o napięciu znamionowym 470 V, co pozwala zabezpieczyć podzespoły przed chwilowymi skokami napięcia. Następnie w obwodzie znajdują się kolejne filtry złożone z kondensatorów i dławików oraz termistor NTC, który ogranicza przepływ prądu po włączeniu układu. Gdy napięcie się stabilizuje, termistor jest omijany przez obwód z przekaźnikiem, sterowanym z układu cyfrowego. Tak przygotowane napięcie trafia na prostownik o napięciu znamionowym 1300 V i prądzie znamionowym 43 A. Dla zabezpieczenia przed skokami napięcia dodano jeszcze jeden warystor i kondensator na wyjściu mostka prostowniczego.
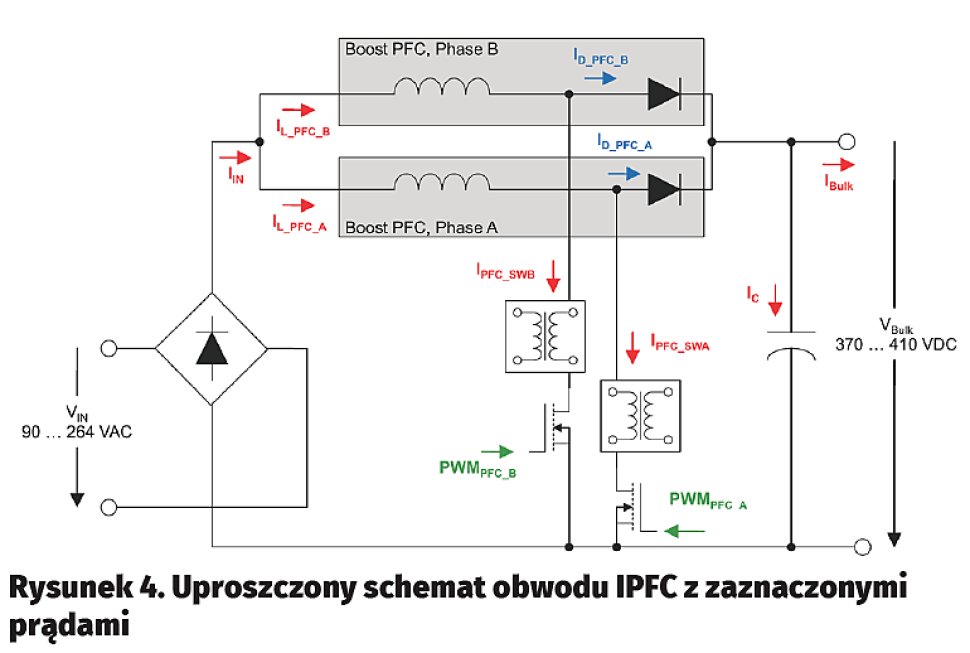
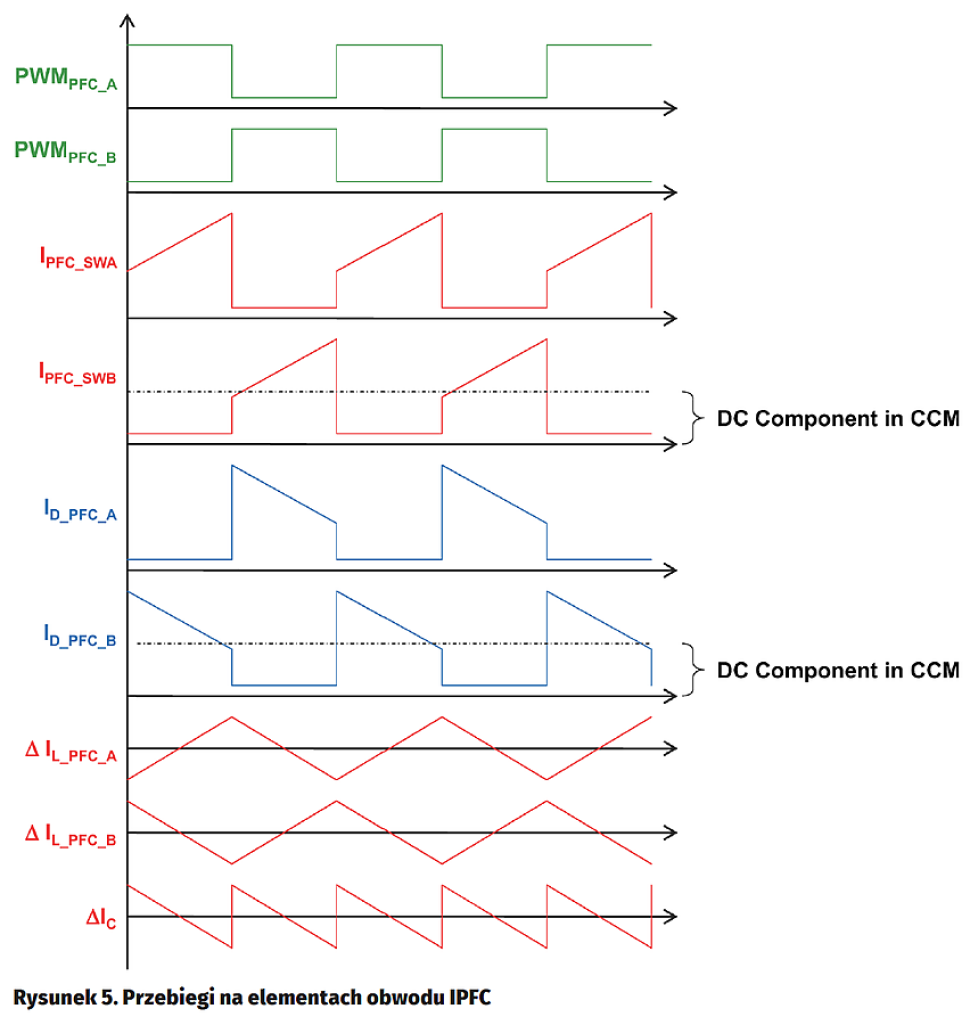
Wyprostowane napięcie trafia do dwufazowego układu przetwornicy podwyższającej z funkcją korekcji współczynnika mocy (2-phase Interleaved Power Factor Correction Boost Converter). Składają się na nią dwie identyczne sekcje sterowane dwoma sygnałami PWM przesuniętymi względem siebie o 180°. Ogólny schemat blokowy tej sekcji został przedstawiony na rysunku4. Napięcie na wyjściu tej przetwornicy pulsuje w zakresie od 370 do 410 V. Przetwornica została przystosowana do pracy ciągłej (Continuous Conduction Mode – CCM), co pozwala na zredukowanie harmonicznych. Przebiegi sygnałów sterujących (zielone) oraz prądów na poszczególnych elementach sekcji IPFC zostały zaprezentowane na rysunku5.
Zastosowana topologia wymaga tylko jednego tranzystora MOS na fazę, sterowanego za pomocą dwukanałowego układu MCP14E4 (rysunek6), który wystarcza na obie fazy. Szeregowo pomiędzy cewki a dreny tranzystorów MOS włączono transformatory o przekładni 50:1 służące do monitorowania przepływającego prądu. Po ich stronie wtórnej znalazły się niewielkie rezystory, dzięki którym wykrywany prąd jest zamieniany na napięcie. Jest ono następnie dzielone i podawane na wejście komparatora układu dsPIC.
Dobór tranzystorów MOS zależy od napięcia na wyjściu sekcji IPFC oraz od maksymalnego prądu cewek, jaki będzie przepływał przez MOSFETy. Maksymalne napięcie pomiędzy drenem a źródłem powinno o ok. 20-30 % przekraczać napięcie wyjściowe, tak jak i prąd drenów powinien być większy niż maksymalny prąd zastosowanych cewek. Istotna może być też rezystancja przewodzenia tranzystora – im mniejsza, tym mniejsze problemy z odprowadzaniem ciepła z układu. W omawianym projekcie zastosowano tranzystory MOSFET o napięciu znamionowym 600 V, produkowane przez firmę Infineon w ramach serii CoolMOS C6 (model IPW60R160C6, niemal taki sam jak na rysunku7). Na wyjściu układu IPFC zastosowano szybkie diody prostownicze firmy Cree (seria Z-Rec, model C3D20060D, rysunek 8), wykonane z użyciem węglika krzemu. Zostały wybrane ze względu na napięcia i prądy znamionowe oraz niski spadek napięcia przy polaryzacji w kierunku przewodzenia. Dzięki temu, że są to diody Schottky’ego i szybko przełączają się z trybu zaporowego do trybu przewodzenia, pozwalają zminimalizować straty mocy, które często odpowiadają za znaczną część strat w przetwornicach podwyższających.
Przetwornica DC/DC
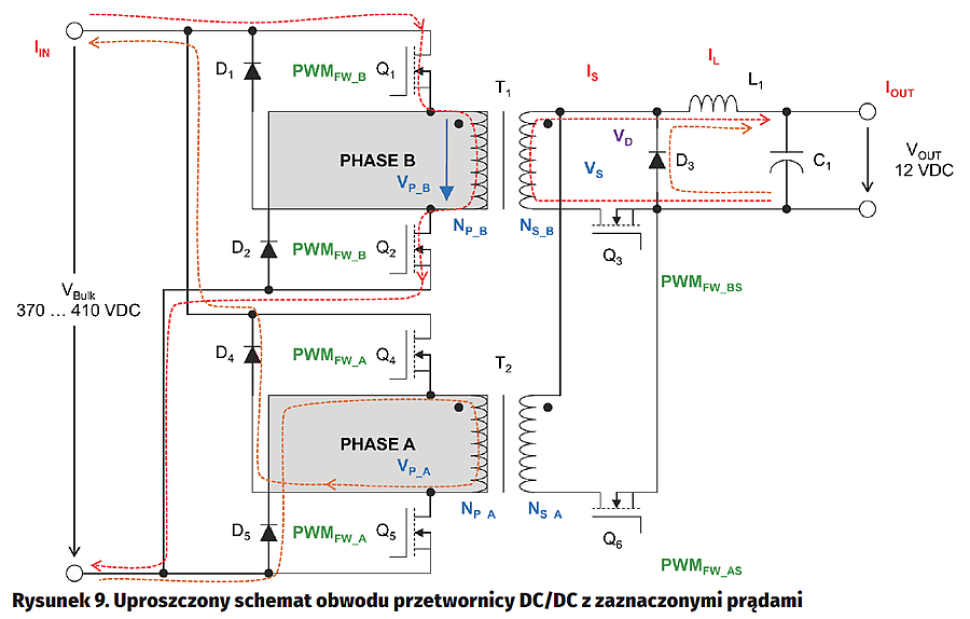
Wyprostowane i podwyższone napięcie pulsujące jest następnie kierowane na również dwufazową, przepustową przetwornicę stałoprądową dołączoną bezpośrednio do synchronicznego prostownika. Oba te układy są sterowane z kolejnego mikrokontrolera serii dsPIC. Budowę przetwornicy pokazano na rysunku9.
Po stronie pierwotnej tej przetwornicy uzwojenie transformatora każdej z faz jest sterowane dwoma oddzielnymi tranzystorami MOSFET. Tranzystory Q1 i Q2 są włączane i wyłączane równocześnie, tak samo jak Q4 i Q5. Włączenie tranzystora Q3 powoduje stopniowy wzrost prądu po stronie wtórnej przetwornicy. Prąd może wtedy wciąż płynąć przez cewkę L1 i kondensator C1, obciążenie i diodę D3, aż do momentu, gdy Is wzrośnie powyżej prądu płynącego przez D3, co spowoduje zatrzymanie prądu diody D3, a napięcie Vs na obwodzie po stronie wtórnej zostanie przyłożone bezpośrednio do cewki L1. To spowoduje zgromadzenie energii w dławiku L1 oraz naładowanie kondensatora wyjściowego C1, a więc na wyjściu pojawi się napięcie. Gdy tranzystory Q1 i Q2 zostaną wyłączone, napięcie na uzwojeniach odwróci się. Mogłoby to spowodować występowanie wysokiego napięcia na uzwojeniu pierwotnym transformatora, ale jest one tłumione przez diody D1 i D2.
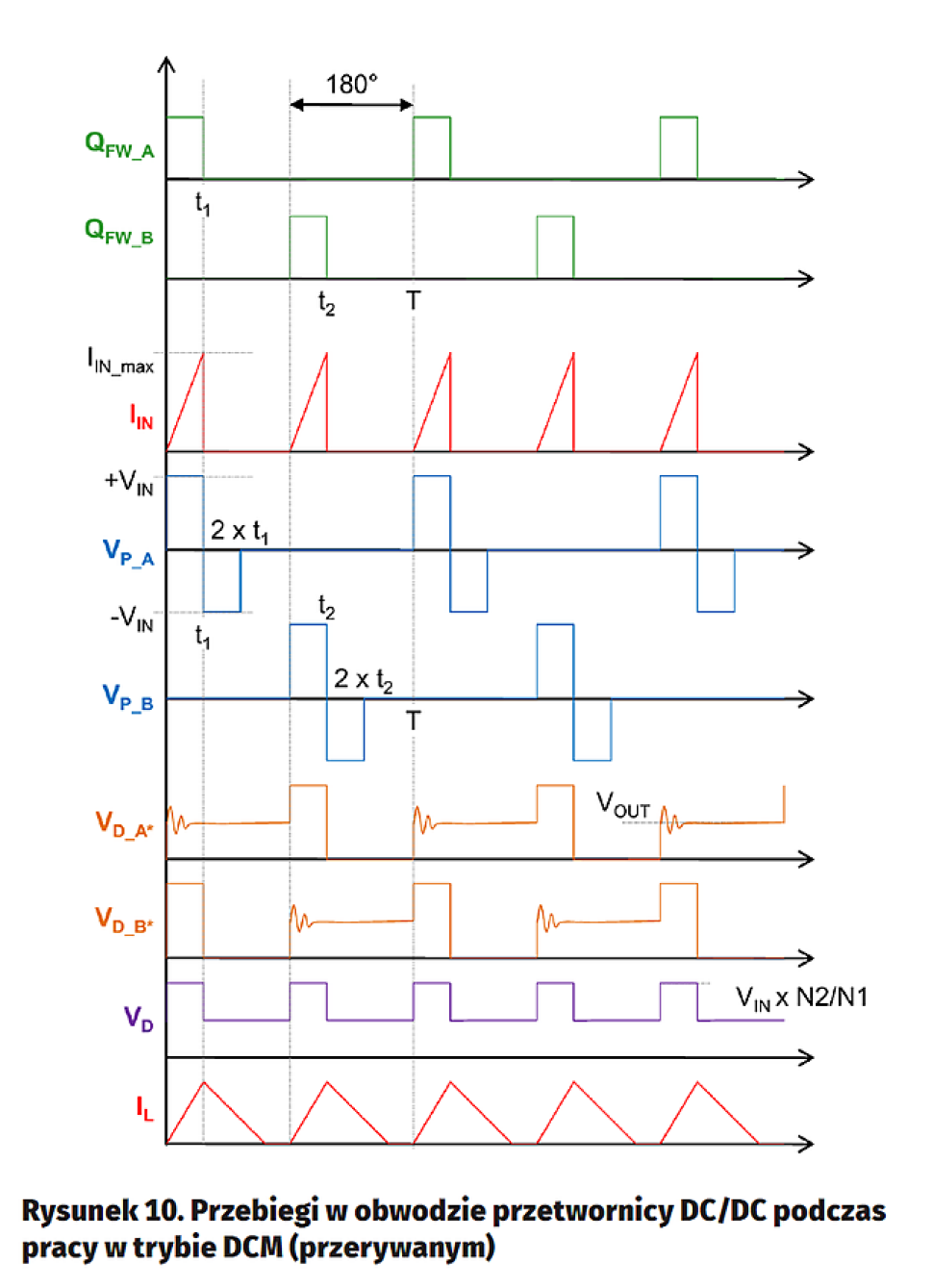
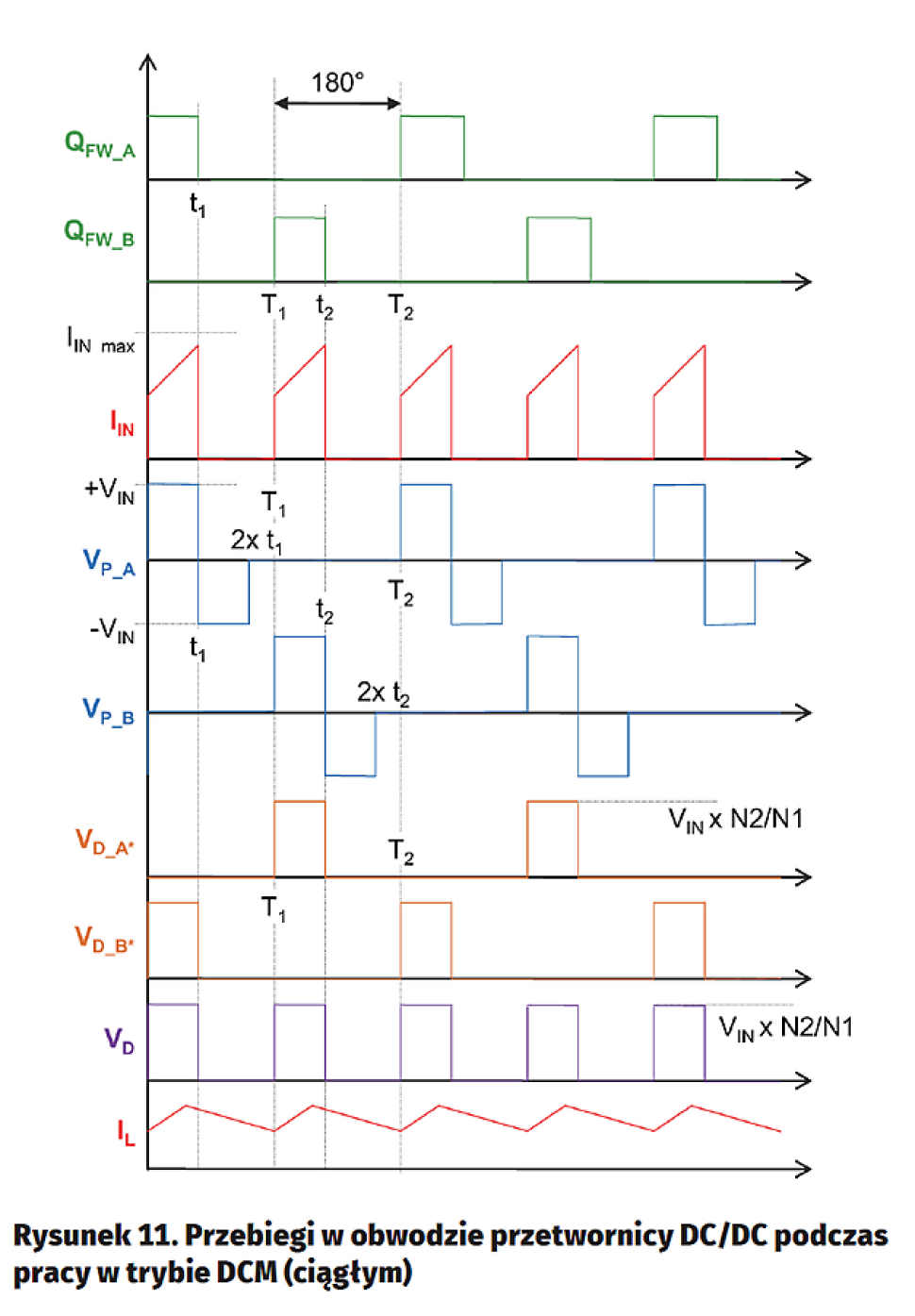
Gdy napięcie po stronie wtórnej odwraca się, tranzystor Q3 jest wyłączany, a cewka L1 oddaje moc do kondensatora C1 i obciążenia. Druga faza zasilania jest przesunięta o 180° i każda z faz pracuje tylko przez 50 % cyklu, dzięki czemu czas, przez który prąd płynie przez oczko L1 – C1 – D3 jest bardzo krótki, a co za tym idzie, straty energii są zminimalizowane. Na rysunkach10 i 11 pokazano przebiegi prądów i napięć na elementach przetwornicy w przypadku pracy w trybie przerywanym (DCM – Discontinuous Conduction Mode) i ciągłym. Ponieważ oba tranzystory MOSFET po stronie pierwotnej każdej fazy są sterowane równocześnie, mogą być kontrolowane tym samym sygnałem. W omawianym układzie zastosowano 600-woltowe tranzystory MOSFET serii Infineon CoolMOS C6 (model IPW60R280C6) oraz diody STTH310 firmy STMicroelectronics (rysunek12), cechujące się napięciem przebicia na poziomie 1000 V, prądem przewodzenia 3 A i spadkiem napięcia podczas przewodzenia mniejszym niż 1,7 V.
Za przetwornicą, zamiast typowych diod prostowniczych użyto synchronicznego mostka prostowniczego, co pozwoliło na podwyższenie sprawności zasilacza oraz skompensowanie opóźnienia spowodowanego niedoskonałościami uzwojenia wtórnego transformatorów. Jest to tym ważniejsze, im niższe jest napięcie wyjściowe, a wyższy prąd, jaki ma być dostarczany. W przypadku 12-woltowego wyjścia i 60 A prądu znamionowego efekt ten ma duże znaczenie. W prostowniku użyto tranzystorów HEXFET Power MOSFET firmy International Rectifier (model IRFP4368PbF), które charakteryzują się bardzo małą rezystancją przewodzenia (na poziomie 1,4 mV).
Sygnały sterujące
Bardzo duże znaczenie w omawianym projekcie mają algorytmy i układy sterowania. Po stronie pierwotnej za sterowanie odpowiada układ dsPIC33FJ16GS502, a po stronie wtórnej nieco większy dsPIC33FJ16GS504. Monitorują one m.in. takie parametry, jak prądy w poszczególnych fazach przetwornic oraz napięcia wejściowe i wyjściowe. Sterują bramkami tranzystorów, przekaźnikami, wentylatorem i komunikują się między sobą. Wszystkie sygnały wchodzące i wychodzące do mikrokontrolerów zebrano w tabelach1 i 2.
Spośród zastosowanych zabiegów podnoszących sprawność zasilacza warto wymienić redukcję częstotliwości kluczowania PFC, gdy praca przetwornic jest stabilna. W podobnych sytuacjach, jeśli pobierany przez obciążenie prąd jest mały, zmniejszane jest napięcie za układem PFC, co pozwala podnieść sprawność przy małych obciążeniach. Natomiast, aby poprawić wyniki testów EMI wprowadzono algorytm dodający modyfikujący częstotliwości kluczowania układów poprzez wprowadzanie jitteru.
Wszystkie funkcje sterujące zostały podzielone na trzy grupy pod względem priorytetów. Do najwyższego priorytetu zaliczają się funkcje obsługi pętli sterowania napięciami i prądami na wyjściu zasilacza oraz kontrolujące prąd w PFC. Do funkcji o średnim priorytecie zalicza się sterowanie napięciem w PFC oraz wspomniane funkcje podnoszące sprawność czy rozpraszające spektrum generowanych zakłóceń elektromagnetycznych. Z najniższym priorytetem wykonywane są natomiast m.in. procedury komunikacji i obsługi błędów. Układy firmy Microchip serii dsPIC pozwalają nadawać priorytety przerwaniom, dzięki czemu taki podział jest możliwy.
Podsumowanie
Opisany sposób pozwala na zbudowanie zasilacza o dużej mocy i bardzo dobrej sprawności, spełniającego nowoczesne standardy efektywności energetycznej. Użycie komponentów wysokiej klasy oraz zaawansowanych algorytmów sterowania są niezbędne by cała konstrukcja cechowała się dobrymi parametrami. Duże znaczenie ma też podział obwodów zasilania na równoległe, identyczne fazy, pracujące naprzemiennie. Wszystkie zastosowane zabiegi pozwoliły uzyskać zasilacz o parametrach przedstawionych w tabeli3 i charakterystykach sprawności pokazanych na rysunkach 13 i 14.
 Zaloguj
Zaloguj