 Zaloguj
Zaloguj




Analizując publikacje związane z bezszczotkowymi silnikami prądu stałego (ang. brushless DC motor lub w skrócie BLDC) trudno o jednolite uporządkowanie metod sterowania komutatorem elektronicznym. Pewne próby w tym kierunku można odleźć w pracach anglojęzycznych [4, 7, 9]. W literaturze krajowej najczęściej stosuje się podział strategii sterowania silników bezszczotkowych jedynie na sterowanie trapezowe i sterowanie sinusoidalne [2, 6].
W silnikach typu BLDC najczęściej stosuje się trapezowe (blokowe) metody sterowania - nazywając je klasycznymi. W artykule zaprezentowano kryteria podziału klasycznych metod sterowania bezszczotkowymi silnikami prądu stałego, rodzaje tych metod oraz omówiono pracę komutatora elektronicznego w stanie ustalonym.
Napęd z silnikiem BLDC

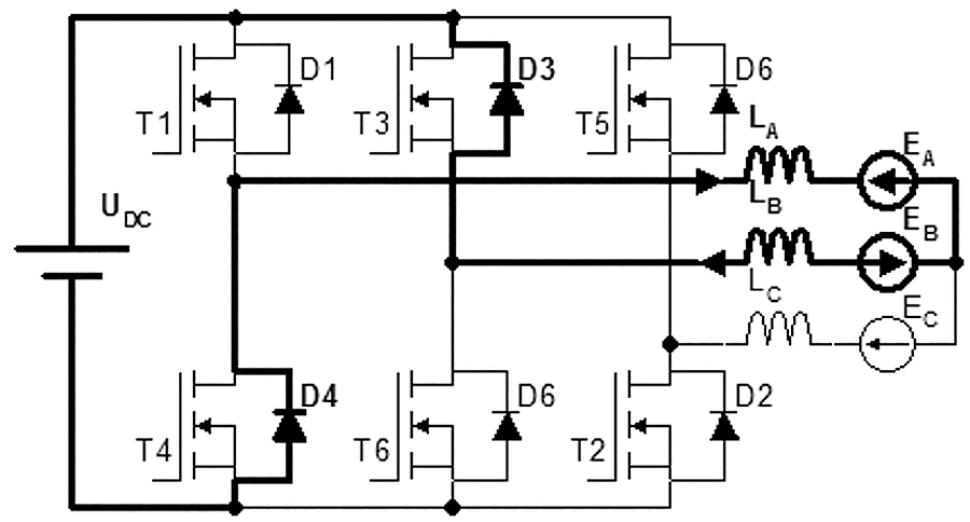
Rysunek 1. Schemat napędu z silnikiem BLDC
Schemat napędu z silnikiem BLDC w typowej konfi guracji zaprezentowano na rysunku 1. Wyróżniono na nim dwie grupy zaworów komutatora elektronicznego: grupę zaworów dodatnich oraz grupę zaworów ujemnych. W każdej z nich jedna z elektrod tranzystora jest odpowiednio dołączona - do dodatniego lub ujemnego bieguna źródła napięcia zasilania.
Jako "klasyczną metodę sterowania" określa się taką strategię, w której każdy tranzystor komutatora elektronicznego przewodzi prąd przez okres (kąt) 120° elektrycznych, komutacja faz następuje w równych odstępach 60°, natomiast informacja o aktualnej pozycji wirnika pochodzi z czujnika położenia wirnika (CPW).
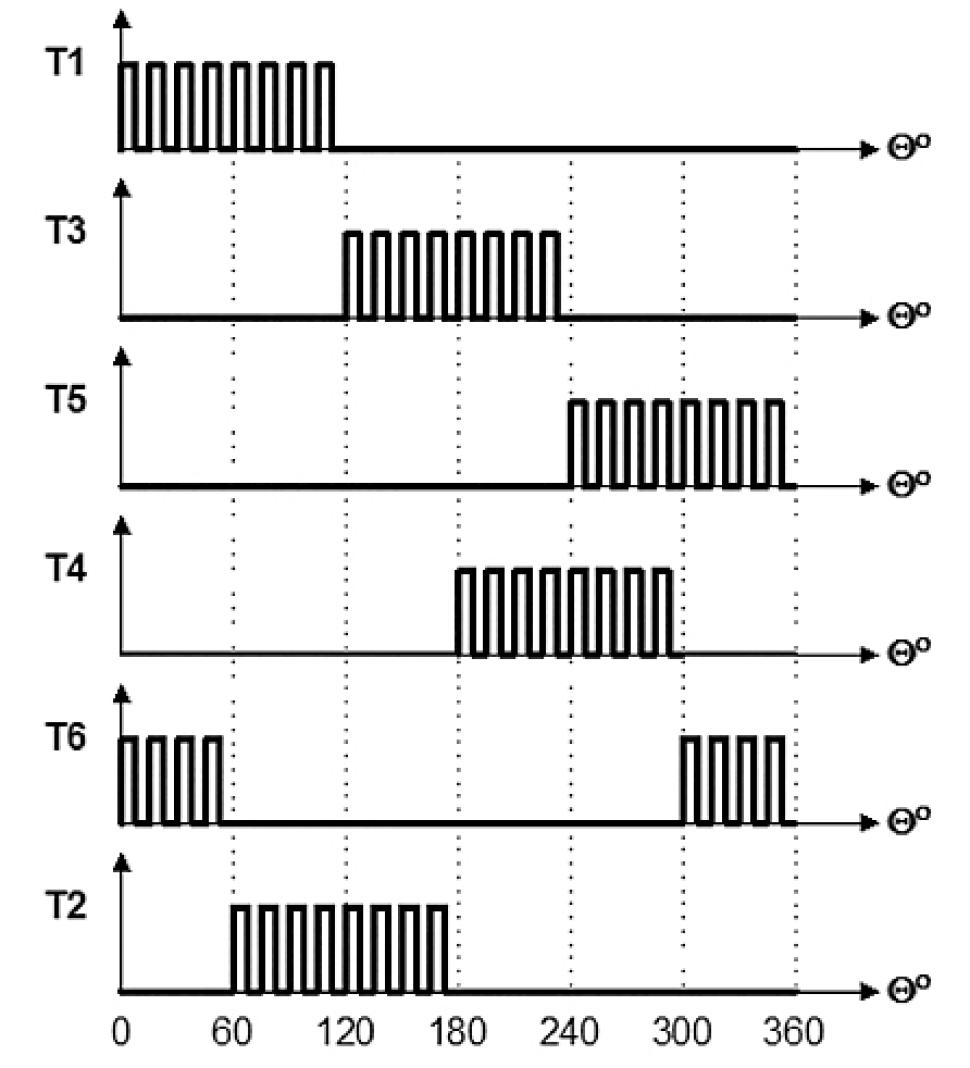
Ogólna sekwencja przełączeń zaworów komutatora jest identyczna dla wszystkich rozpatrywanych strategii sterowania (rysunek 2) [2, 4, 7, 11].
Poszczególne metody sterowania różnią się między sobą pod względem tego np., która grupa zaworów pełni rolę regulacyjną, jaki jest okres pełnienia tej funkcji oraz co jest wielkością regulowaną.
Kryteria podziału metod sterowania

Rysunek 2. Ogólna sekwencja przełączeń zaworów komutatora elektronicznego dla klasycznych strategii sterowania silnikiem BLDC
Można wyróżnić kilka kryteriów podziału klasycznych metod sterowania silnikami BLDC. Ze względu na wielkość regulowaną strategie sterowania można podzielić na dwie kategorie. Pierwsza z nich to metody prądowe - wielkością regulowaną jest prąd po stronie DC przekształtnika lub prądy fazowe silnika.
Strategie te oznacza się literą C. Drugą kategorię stanowią metody napięciowe, gdzie wielkością regulowaną jest napięcie silnika. Takie strategie oznaczane są literą V. Ze względu na okres (kąt) pełnienia funkcji regulacyjnej przez poszczególne zawory komutatora elektronicznego, klasyczne metody sterowania można podzielić również na dwa przypadki.
W pierwszym, kąt pełnienia funkcji regulacyjnej przez jeden z tranzystorów wynosi 120° elektrycznych (te strategie oznacza się symbolem 120). W drugim przypadku każdy tranzystor pełni funkcję regulacyjną przez okres 60° elektrycznych - przez okres pozostałych 60° funkcję regulacyjną przejmuje zawór z grupy przeciwnej (te metody sterowania oznacza się symbolem 60).
Ze względu na to, która grupa zaworów komutatora elektronicznego realizuje funkcję regulacyjną przez cały okres przewodzenia lub, w której jego części (pierwszej czy drugiej), klasyczne strategie sterowania można podzielić na trzy przypadki.
Jeżeli funkcję regulacyjną pełni zawsze tranzystor grupy dodatniej lub jeśli funkcja ta jest realizowana przez pierwsze 60° okresu przewodzenia każdego tranzystora, wówczas metodę sterowania oznacza się symbolem Q+ (rzadziej Q1).
Jeżeli funkcję regulacyjną pełni zawsze tranzystor grupy ujemnej, lub jeśli funkcja ta jest realizowana przez ostatnie 60° okresu przewodzenia każdego tranzystora, wówczas metodę sterowania oznacza się symbolem Q- (rzadziej Q6).
Natomiast w wypadku, gdy funkcję regulacyjną pełnią jednocześnie oba przewodzące tranzystory komutatora elektronicznego, metodę sterowania określa się jako bipolarną (i najczęściej nie oznacza żadnym dodatkowym symbolem) [1, 3, 5, 7, 10].
Z uwagi na to, że idee sekwencji przełączeń zaworów komutatora elektronicznego dla strategii typu C oraz V są identyczne w dalszej części artykułu omówiono je na przykładzie prądowych metod sterowania.
Klasyczne metody sterowania
Strategia C120Q+ oraz C120Q-
W obu metodach sterowania wielkością regulowaną jest prąd silnika. W strategii C120Q+ funkcję regulacyjną pełnią tylko zawory grupy dodatniej. Tranzystory grupy ujemnej pełnią jedynie rolę komutatorową (pozostają stale załączone w przedziałach swojego przewodzenia). Sekwencję przełączeń tranzystorów komutatora dla tej metody sterowania zobrazowano na rysunku 3.
Przy zastosowaniu strategii C120Q- funkcję regulacyjną pełnią wyłącznie zawory grupy ujemnej. Wówczas tranzystory grupy dodatniej spełniają jedynie rolę komutatorową. Sekwencję przełączeń tranzystorów komutatora dla strategii C120Q- przedstawiono na rysunku 4.
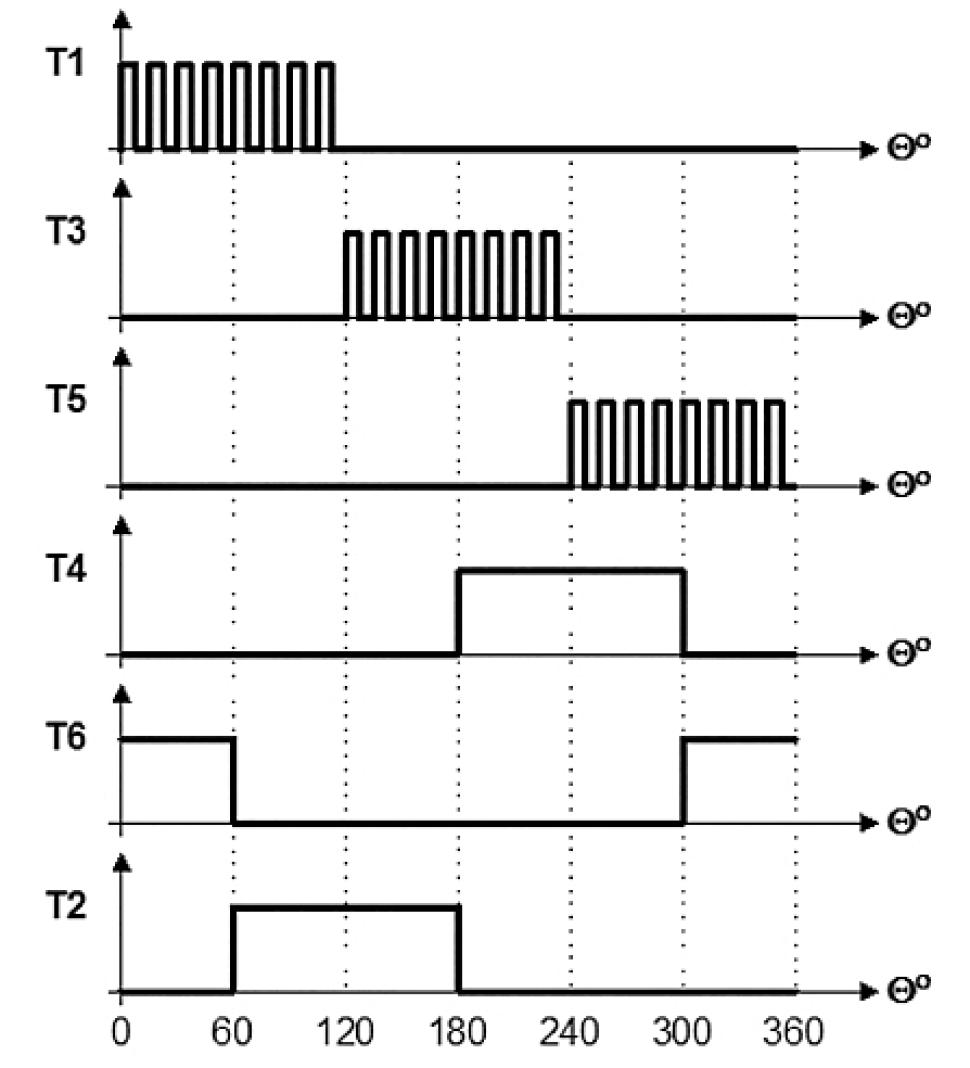
Rysunek 3. Sekwencja przełączeń zaworów komutatora dla strategii sterowania C120Q+ |
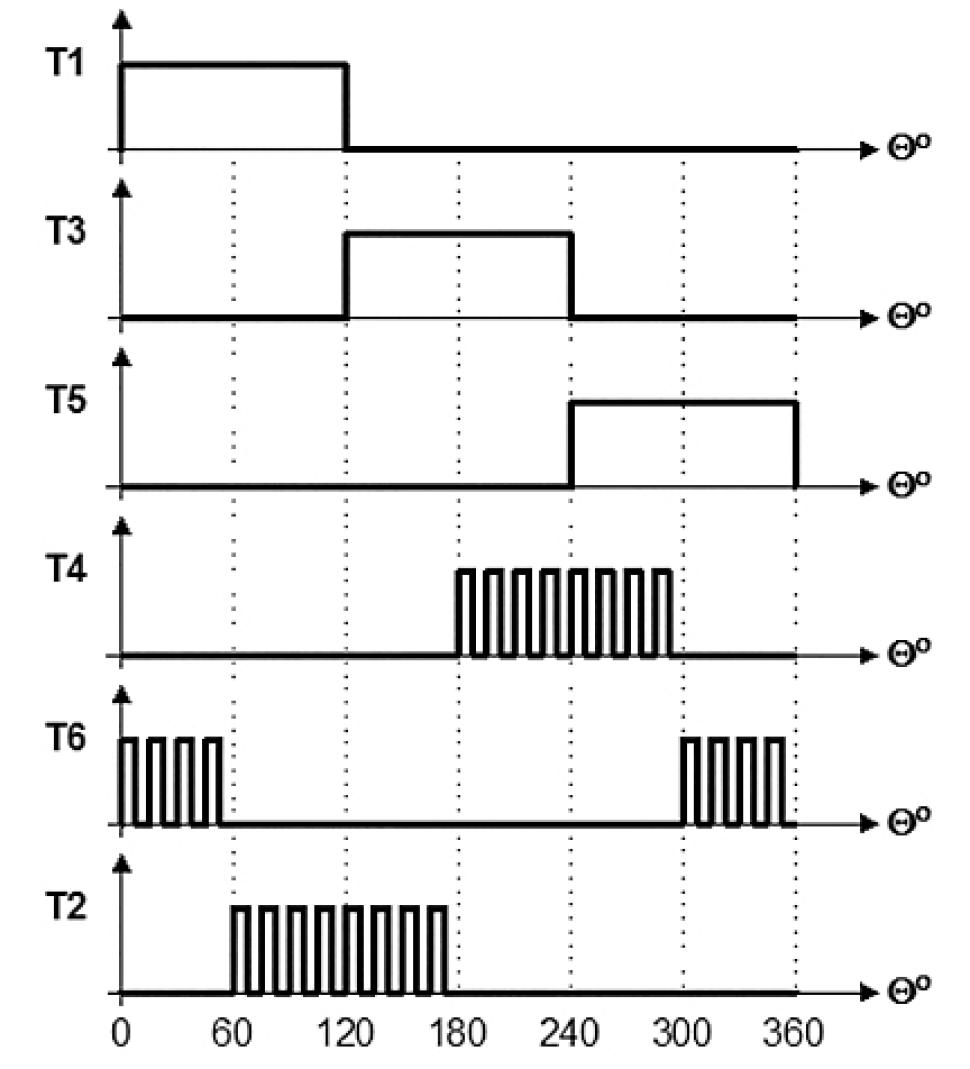
Rysunek 4. Sekwencja przełączeń zaworów komutatora dla strategii sterowania C120Q– |
Zaletą tych metod sterowania jest to, że funkcję regulacyjną pełnią tylko trzy zawory komutatora (upraszcza to realizację układu elektronicznego). Niestety, jest to jednocześnie ich wadą, ponieważ powoduje nierównomierne wykorzystanie tranzystorów oraz różne częstotliwości ich przełączania.
Strategia C60Q+ oraz C60Q-
Wielkością regulowaną w obu omawianych metodach sterowania jest również prąd silnika (litera C w symbolu). W strategii C60Q+ tranzystory przez pierwsze 60° okresu swojego przewodzenia pełnią funkcję regulacyjną, a przez okres kolejnych 60° spełniają jedynie rolę komutatorową. Sekwencję przełączeń zaworów komutatora dla tej metody sterowania przedstawiono na rysunku 5.
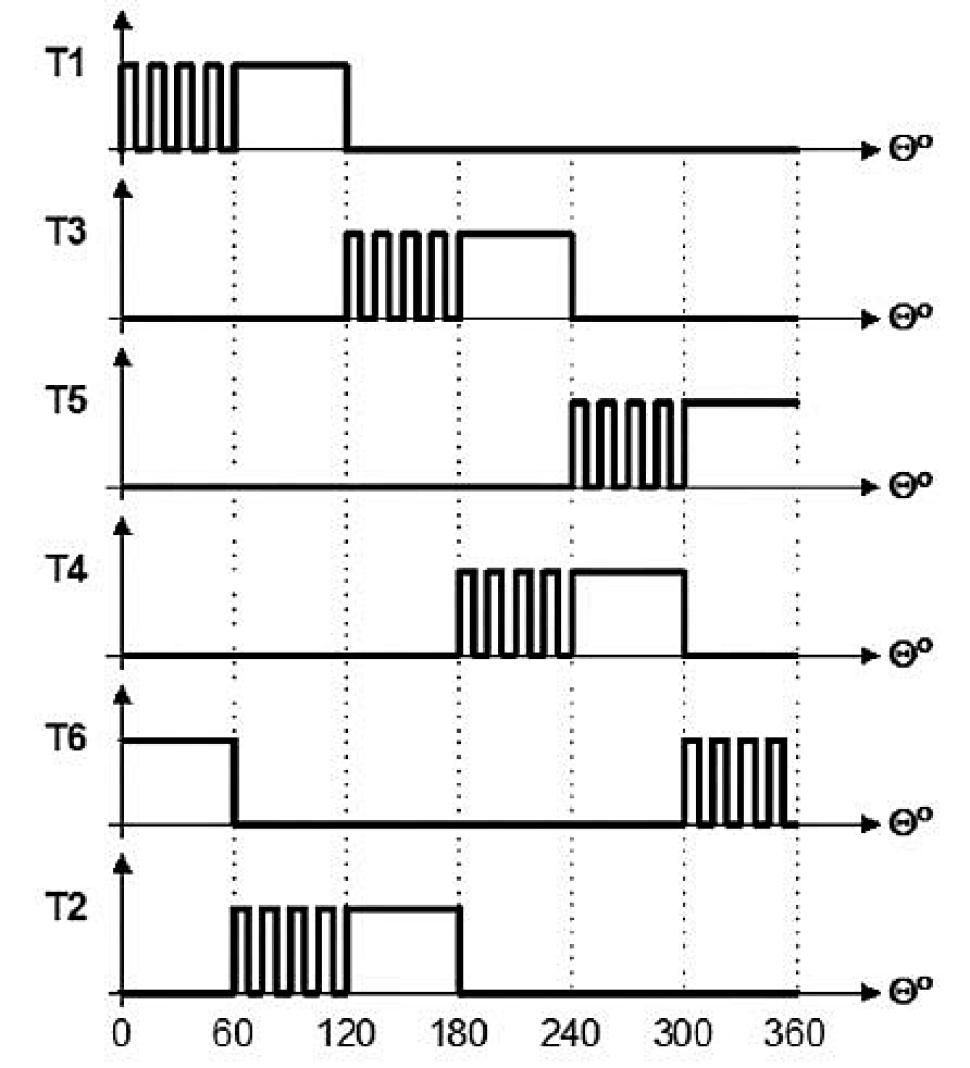
Rysunek 5. Sekwencja przełączeń zaworów komutatora dla strategii sterowania C60Q+ |
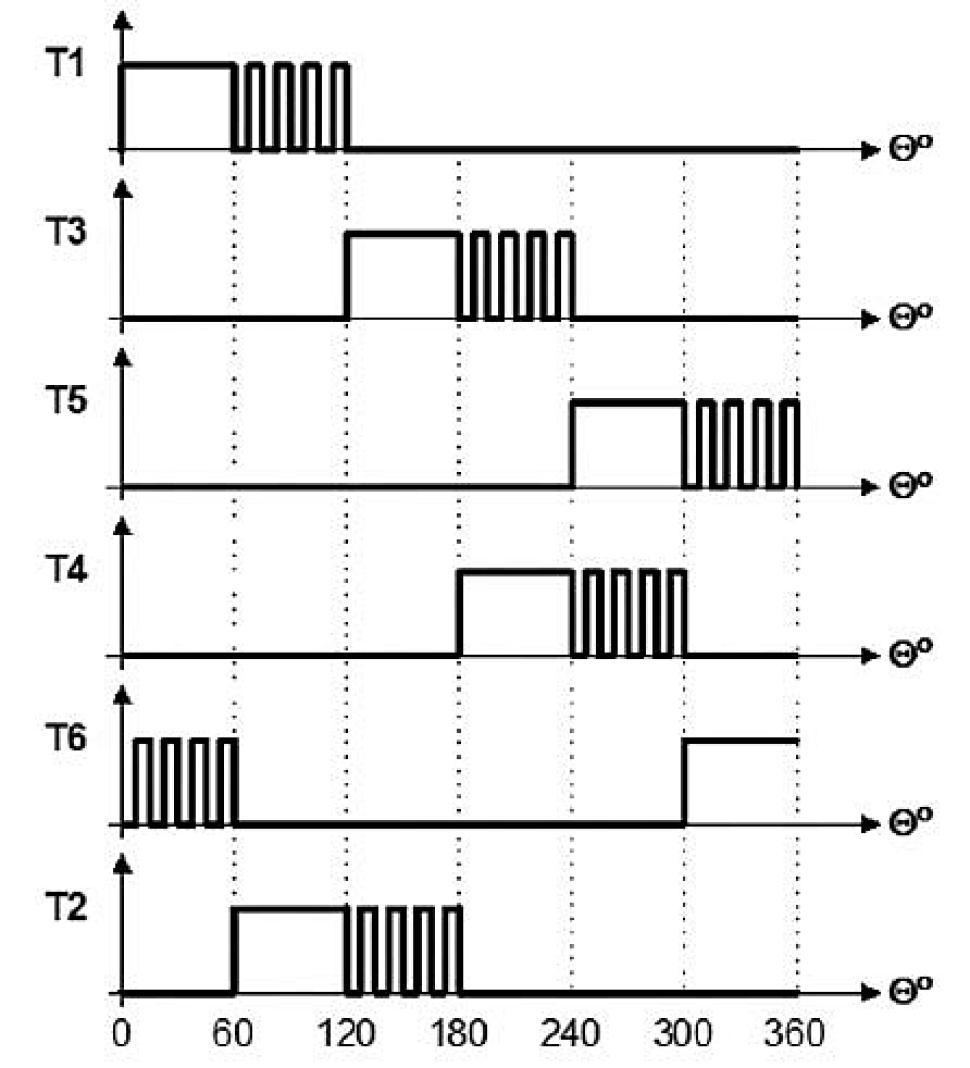
Rysunek 6. Sekwencja przełączeń zaworów komutatora dla strategii sterowania C60Q– |
Natomiast w strategii C60Q- tranzystory przez pierwsze 60° okresu swojego przewodzenia pełnią jedynie rolę komutatorową, a przez okres kolejnych 60° spełniają funkcję regulacyjną (rysunek 6).
Zaletą tych metod sterowania jest równomierne wykorzystanie (obciążenie) wszystkich tranzystorów komutatora elektronicznego. Ich wadą jest zwiększenie stopnia komplikacji elektronicznego układu sterowania oraz różne częstotliwości przełączeń tranzystorów.
Stan pracy ustalonej przy sterowaniu unipolarnym
Ze względu na to, że we wszystkich wyżej wymienionych strategiach (C120Q+, C120Q-, C60Q+ oraz C60Q) w danej chwili funkcję regulacyjną pełni tylko jeden tranzystor komutatora, metody te określa się czasem wspólnym terminem - sterowanie unipolarne [1, 9].
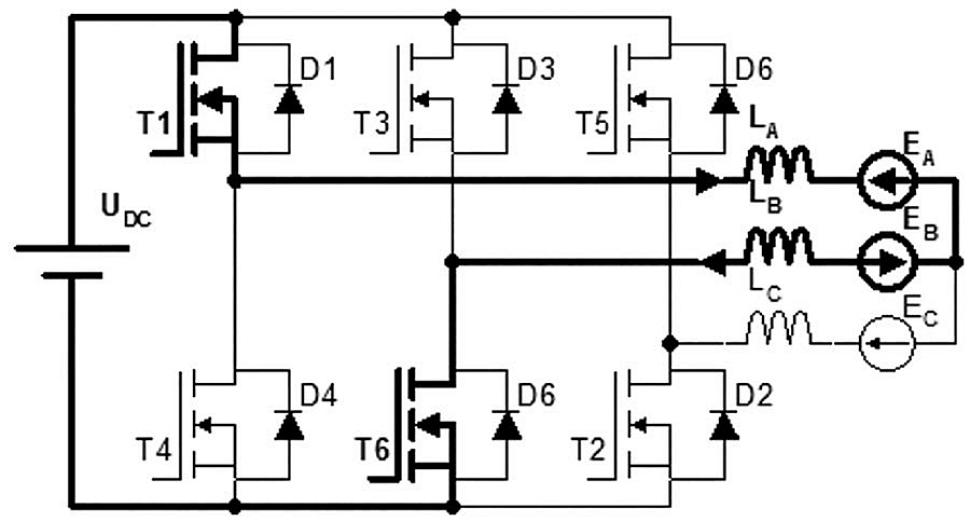
Rysunek 7. Schemat zastępczy silnika BLDC przy załączonych dwu tranzystorach |

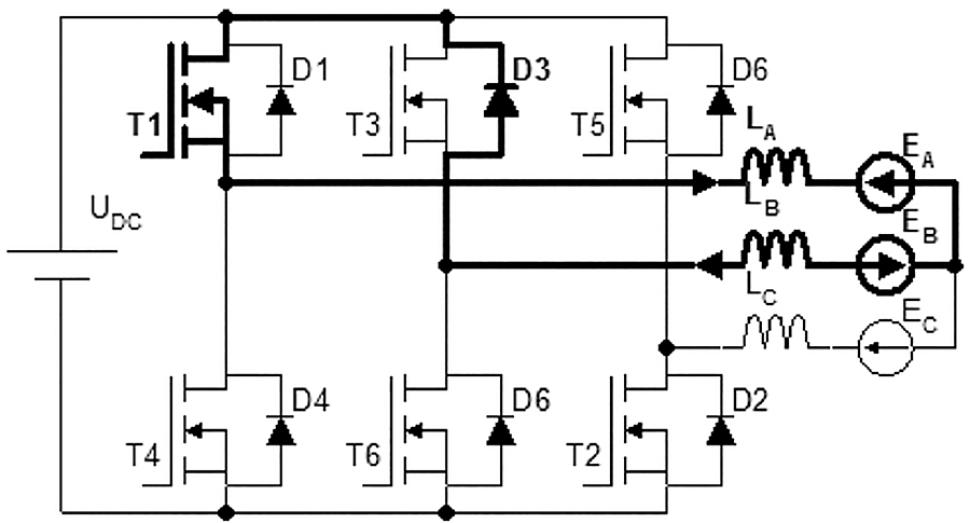
Rysunek 8. Schemat zastępczy silnika przy strategii typu C120Q+ (tranzystor regulujący T1 wyłączony) |
Rozpatrzmy pracę silnika w stanie ustalonym dla przedziału 0°÷60° przy zastosowaniu tych metod.
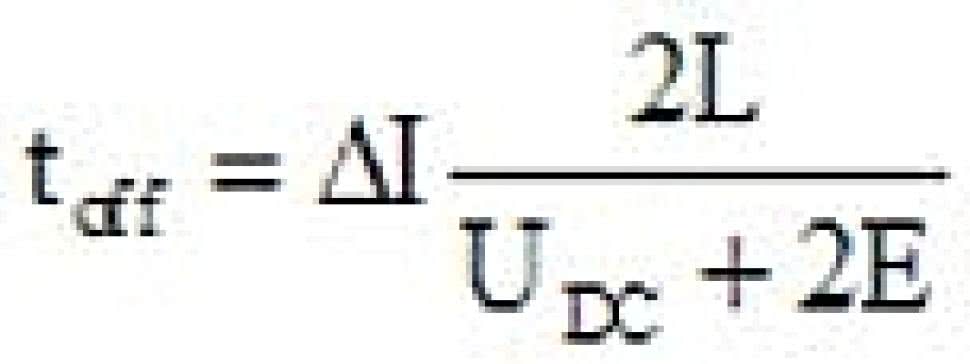
Z uwagi na to, że schemat zastępczy obowiązujący w przedziale załączenia tranzystora pełniącego rolę regulacyjną (rys. 7) jest taki sam dla wszystkich omawianych strategii, czas narastania prądu (ton z rys. 10) jest również jednakowy. Jeśli pominąć rezystancje zaworów oraz rezystancje fazowe silnika, to czas ten opisuje zależność:

|
gdzie:
ΔI - przyrost prądu fazowego,
L - indukcyjność zastępcza fazowa silnika,
UDC - napięcie zasilania,
E - wartość fazowej siły elektromotorycznej.
Rysunek 9. Schemat zastępczy silnika przy strategii typu C120Q– (tranzystor regulujący T6 wyłączony) |
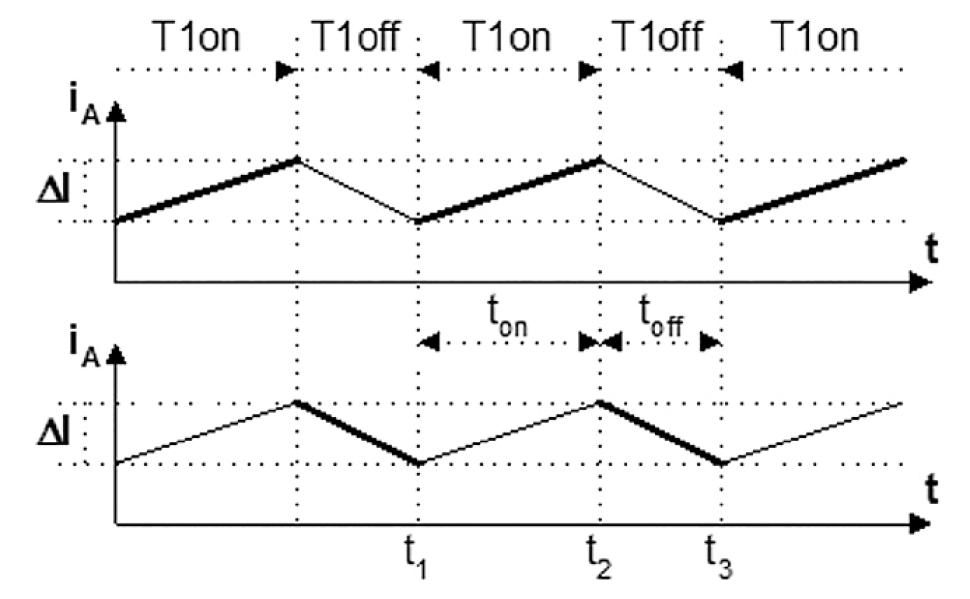
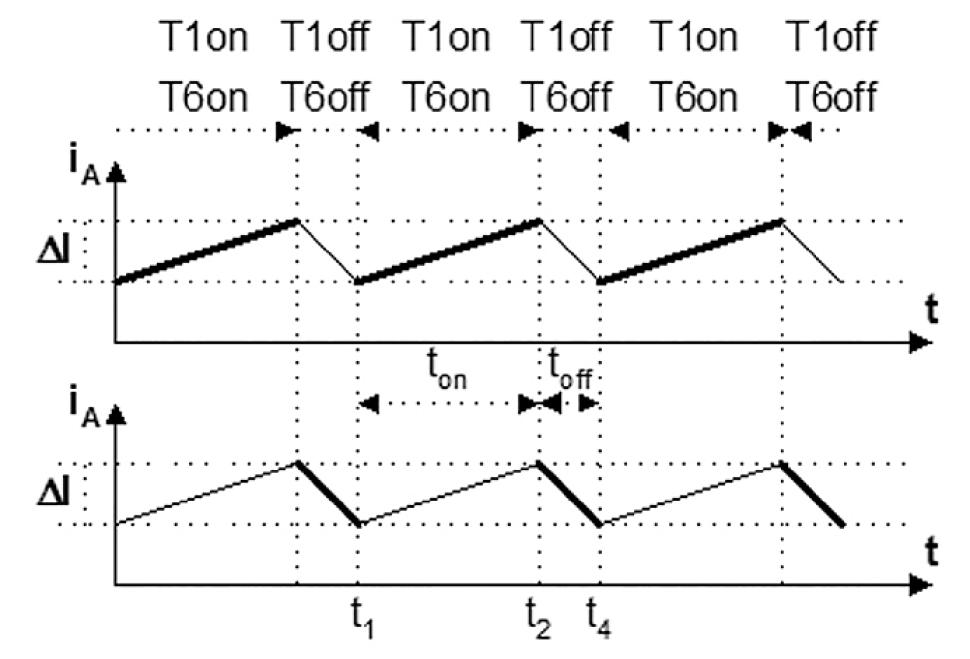
Rysunek 10. Przebieg prądu fazowego silnika dla strategii C120Q+ (w stanie ustalonym) |
Schematy zastępcze dla unipolarnych strategii sterowania (C120Q+ oraz C120Q-) przedstawiono na rysunku 8 oraz rysunku 9. Łatwo zauważyć, że obwody te są równoważne. Na podstawie równań opisujących te obwody można określić czas opadania prądu (toff z rysunku 10) jako:
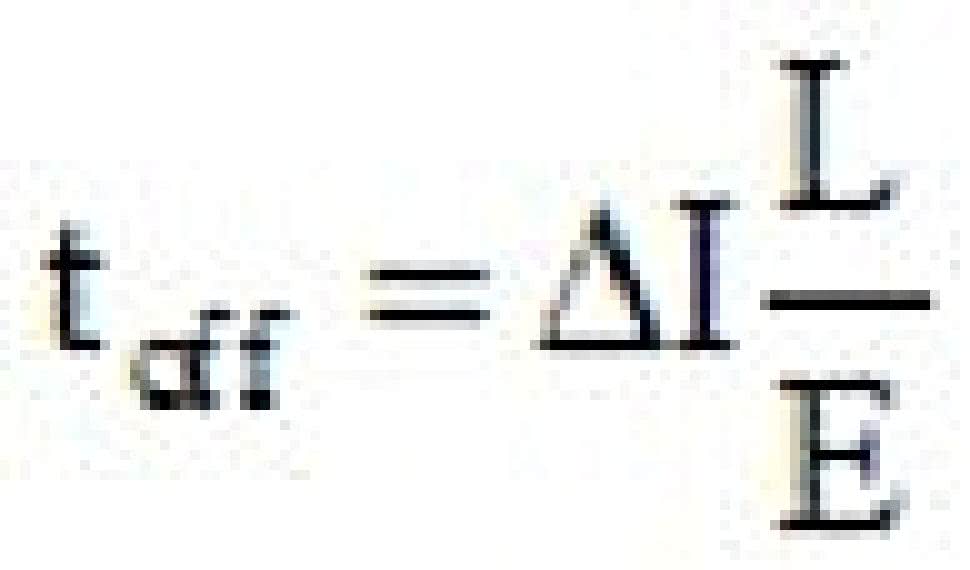
|
Sterowanie bipolarne
Rysunek 11. Sekwencja przełączeń zaworów komutatora dla sterowania bipolarnego
Przy sterowaniu bipolarnym przewodzące tranzystory obu grup pełnią równocześnie funkcje regulacyjną. Sekwencję przełączeń dla tej strategii przedstawiono na rysunku 11.
Zaletą sterowania bipolarnego jest równomierne obciążenie wszystkich zaworów komutatora elektronicznego oraz jednakowe częstotliwości ich przełączeń. Wadą natomiast są wyższe, niż w przypadku metod unipolarnych straty sterowania.
Stan pracy ustalonej przy sterowaniu bipolarnym
Rozpatrując pracę silnika dla przedziału analogicznego jak wcześniej (0°÷60°) można zauważyć, że przy zastosowaniu sterowania bipolarnego czas narastania prądu (ton) jest taki sam, jak dla metod unipolarnych (obowiązuje ten sam schemat zastępczy - rys. 7). W czasie kiedy wyłączone są oba tranzystory prąd silnika płynie poprze diody zwrotne oraz źródło napięcia zasilania, co zilustrowano na rysunku 12.
Czas zaniku prądu fazowego (toff z rysunku 13) jest znacznie krótszy, niż w strategiach unipolarnych. Dla sterowania bipolarnego można go opisać następującą zależnością:
|
Aby zapewnić takie same warunki pracy silnika przy zastosowaniu sterowania bipolarnego jak przy sterowaniu unipolarnym, należy znacznie (nawet o 50%) zwiększyć częstotliwość przełączeń tranzystorów.
Zakończenie
W artykule zdefiniowano pojęcie klasycznej strategii sterowania silnikiem BLDC, przedstawiono nazewnictwo oraz przeprowadzono klasyfikację metod sterowania na podstawie idei sekwencji wyzwalania tranzystorów komutatora elektronicznego.
Rysunek 12. Schemat zastępczy silnika dla sterowania bipolarnego (tranzystory regulujące T1 oraz T6 wyłączone) |
Rysunek 13. Przebieg prądu fazowego silnika przy zastosowaniu sterowania bipolarnego |
Dodatkowo, na podstawie schematów zastępczych silnika przeanalizowano stan pracy ustalonej dla metod unipolarnych oraz dla sterowania bipolarnego. Pozwoliło to na określenie wad oraz zalet poszczególnych rozwiązań. Dodatkowo przedstawiono przybliżone zależności pozwalające na oszacowanie różnic w częstotliwościach przełączeń zaworów komutatora dla poszczególnych strategii sterowania.
mgr inż. Arkadiusz Domoracki
dr hab. inż. Krzysztof Krykowski, Prof.
Politechnika Śląska
Literatura
[1] Berendsen C., Champenois G., Bolopin A.: Commutation strategies for brushless DC motors: influence on instant torque. IEEE Transactions on Power Electronics, vol.8, no. 2 April 1993
[2] Dencer A., Glinka T., Jakubiec M., Polak A.: Bezszczotkowy silnik prądu stałego - sposoby sterowania komutatorem elektronicznym. Zeszyty Problemowe - Maszyny Elektryczne Nr 65/2003, BOBRME Komel Katowice 2003
[3] Dixon J., Leal I.: Current control strategy for brushless DC motors based on a common DC signal. IEEE Transactions on Power Electronics, vol.17, no. 2 March 2002
[4] Dote Y., Kinoshita S.: Brushless servomotors - Fundamental and Applications. Clarendon Press, Oxford 1990
[5] Domoracki A.: Silniki bezszczotkowe - klasyczne metody sterowania komutatorem elektronicznym. Zeszyty Naukowe Politechniki Śląskiej, seria Elektryka z. 192, Gliwice 2004
[6] Dudzikowski I., Pawlaczyk L.: Maszyny prądu stałego o magnesach trwałych i ich sterowanie - stan aktualny i perspektywy rozwoju. Zeszyty Naukowe Politechniki Śląskiej, seria Elektryka z. 176, Gliwice 2001
[7] Hendershot J.R., Miller T.J.E.: Design of brushless permanent-magnet motors. Magna Physics Publishing and Calderon Press, Oxford 1994
[8] Krishnan R.: Electric motor drives modeling, analysis and control. Prentice Hall 2001
[9] Lee K., Park J., Yeo H., Yoo J., Jo H.: Current control algorithm to reduce torque ripple in brushless DC motor. Proceedings ICPE’98, Seoul 1998
[10] Ohm D., Park J.: About commutation and current control methods for brushless motors. 29 annual IMCSD symposium, San Jose 1999
[11] Pillay P., Krishnan R.: Modeling, simulation and analysis of permanent-magnet motor drives, part II: the brushless DC motorr drive. IEEE Transactions on Industry Applications, vol.25, no. 2 March/April 1989












